Изобретение относится к технике модальных вибрационных испытаний сложных упругих конструкций для экспериментального определения собственных частот, соответствующих им главных мод и коэффициентов демпфирования, а точнее - к устройствам для формирования вектора частотной функции силы (возбудителям колебаний), прикладываемой к одной или к конечному количеству точек исследуемой конструкции.
Известны технологии и теории проведения модальных вибрационных испытаний, например, R.С. Lewis and D.L. Wrisly. "A system for the eхcitation of pure natural modes of compleх structure". Journal of the aronautical sciences, Vol. 17, November 1950, N 11, рр. 705-722; N. Miramand, J.Е. Billand, F. Leleuх аnd J.P. Kernevez, "Identification of structural modal parameters by dynamic tests at a single point; Bulletin 46, Part 5 of parts, The shock and vibration bulletin, August, 1976, рр. 197-212.
Для возбуждения конструкции (формирования вектора силы) используются возбудители колебаний.
Известны возбудители колебаний, например по а.с. N 738686, кл. В 06 В 1/04, 1980; Божко А.Е. Оптимальное управление в системах воспроизведения вибраций. Киев: Наукова думка, 1977, с. 11, рис. 1; Божко А.Е., Пермяков В. И., Пушня В.А. Методы проектирования электромеханических вибровозбудителей. Киев: Наукова думка, 1989, с. 10, рис.1, с. 38, рис.6; Генкин М.Д., Русаков А. М. , Яблонский В.В. Электродинамические вибраторы. М.: Машиностроение, 1976, с. 4-7, рис.2, с. 20, рис.12; а.с. N 1618454, кл. В 06 В 1/04, 1991.
Известные возбудители колебаний содержат подвижную и неподвижную системы и устройство крепления подвижной системы к испытуемому объекту. Подвижная и неподвижная системы образуют преобразователь (вибратор) какой-либо энергии, например электрический, в механическое усилие, которое через устройство крепления подвижной системы (например, шток) прикладывается к испытуемому объекту.
Наиболее близким является устройство, содержащее вибратор, подвижная часть которого через шток связана с испытуемой конструкцией, и устройство формирования заданного сигнала (например, генератор переменного тока), подключенное к вибратору через блок управления (например, усилитель входного сигнала или автотрансформатор (variac)).
Недостатком прототипа является то, что прикладываемое к исследуемой конструкции усилие в процессе возбуждения может отличаться от требуемого, т. е. недостаточна точность воспроизведения заданного усилия, например усилие должно быть синусоидальное с заданной амплитудой.
Прежде всего усилие Fк, прикладываемое к исследуемой конструкции, равно
Fk = Fb-Fc-m -KnXn, (1) где Fв - развиваемая вибратором сила; Fc - сила сопротивления при перемещении подвижной системы вибратора относительно неподвижной; mп - приведенная масса подвижной системы; Хп - линейное перемещение подвижной системы; Кп - коэффициент упругости подвижной системы относительно неподвижной. Таким образом, развиваемая вибратором сила Fв ≠ Fк, ошибка при приравнивании Fв = Fк, определяется членами в правой части (1), перед которыми стоит знак минус.
-KnXn, (1) где Fв - развиваемая вибратором сила; Fc - сила сопротивления при перемещении подвижной системы вибратора относительно неподвижной; mп - приведенная масса подвижной системы; Хп - линейное перемещение подвижной системы; Кп - коэффициент упругости подвижной системы относительно неподвижной. Таким образом, развиваемая вибратором сила Fв ≠ Fк, ошибка при приравнивании Fв = Fк, определяется членами в правой части (1), перед которыми стоит знак минус.
Кроме того, следует учесть следующие соображения. В элементарных текстах или по физике, или по электронике показано, что при пропускании тока по проводнику, помещенному в магнитное поле, на него действует сила, перпендикулярная проводнику и линиям магнитного потока. Эта зависимость выражается математически следующим образом:
Fв = K1B·L·I·N, (2) где K1 - коэффициент пропорциональности, определяемый единицами измерения;
В - магнитная индукция;
L - длина проводника в магнитном поле;
I - ток в проводнике;
N - число витков длины в магнитном поле.
При передвижении подвижной системы относительно неподвижной, а также непосредственно от времени могут по существу изменяться все величины в правой части (2), кроме постоянного коэффициента; может изменяться индукция В как от перемещения подвижной системы из-за неравномерности магнитного поля, так и от изменения во времени самого магнитного потока из-за изменения, например, тока в обмотке, создающей это поле, например, из-за помех или изменения напряжения в цепи питания; от перемещения в пространстве подвижной системы может измениться и L и N, часть проводников может войти или выйти из магнитного поля; наконец, сам ток I может изменяться не по требуемому закону, например, пропорционально прикладываемому к проводнику напряжению, в частности из-за генерируемого в движущемся в магнитном поле проводнике напряжения, величина которого описывается уравнением
Ев = K2BLNl, (3) где K2 - коэффициент пропорциональности, зависящий от единиц измерения;
l - скорость движения проводника относительно магнитного поля.
Конструкция возбудителя колебаний позволяет повысить точность воспроизведения требуемого значения усилия.
Цель достигается тем, что в возбудитель колебаний, содержащий вибратор, подвижная часть которого через шток связана с испытуемой конструкцией, устройство формирования заданного сигнала и подключенный к вибратору блок управления, введены измеритель усилия, сумматор и интегратор, при этом измеритель усилия установлен на штоке и через сумматор вместе с устройством формирования заданного сигнала подключен непосредственно или через релейный элемент к входу интегратора, выход которого связан с входом блока управления вибратором.
Существенными новыми признаками являются введенные измеритель усилия, сумматор и интегратор, а также их связи между собой, устройством формирования заданного сигнала и блоком управления. Упомянутые новые признаки дают новый положительный эффект (повышается точность воспроизведения требуемого значения усилия), не равный простой сумме свойств введенных новых элементов (эффект проявляется только при совместной работе всего устройства).
На чертеже изображена предлагаемая конструкция возбудителя колебаний.
Возбудитель колебаний состоит из вибратора 1, подвижная часть которого связана со штоком 2, измерителя 3 усилия, сумматора 4, блока 5 управления, устройства 6 формирования заданного сигнала, интегратора 7 и, возможно, но не обязательно, релейного элемента 8.
Возбудитель колебаний работает следующим образом.
На первый вход сумматора 4 подается сигнал Uи c выхода измерителя 3 усилия, пропорциональный усилию, прикладываемому к исследуемой конструкции, т.е.
Uи = K1Fк, (4) где K1 - коэффициент пропорциональности;
Fк - сила, прикладываемая к конструкции.
На второй вход сумматора 4 подается сигнал Uзад с выхода устройства 6 формирования заданного сигнала, например
Uзад = f(t), (5) где f(t) - некоторая функция времени.
На вход интегратора 7 подается разность сигналов δ U = Uзад - Uи, т.е.
δ U = f(t) - K1Fк. (6)
Интегратор 7 в зависимости от знака сигнала δ U и его величины формирует управляющий сигнал Uy на вход блока 5 управления.
Закон формирования сигнала Uy, например, может быть следующий:
Uy =  K2δUdt =
K2δUdt =  K2(f(t)-K1Fk)dt, (7) где K2 - коэффициент пропорциональности.
K2(f(t)-K1Fk)dt, (7) где K2 - коэффициент пропорциональности.
Вибратор I по сигналу блока 5 управления создает усилие Fв, пропорциональное сигналу Uу и равное (с учетом (1)) Fk +Fc+m +KnXn, , т.е. справедливо выражение
+KnXn, , т.е. справедливо выражение
K3 K2(f(t)-K1Fk)dt = Fk+Fc+m
K2(f(t)-K1Fk)dt = Fk+Fc+m +KnXn, (8) где К3 - коэффициент пропорциональности. Продифференцировав выражение (8) по времени t, получаем
+KnXn, (8) где К3 - коэффициент пропорциональности. Продифференцировав выражение (8) по времени t, получаем
f(t)-K1Fk = 
 +
+  + m
+ m +K
+K . (9)
. (9)
Левая часть (9) соответствует отклонению формируемого закона изменения усилия (член K1 Fк) от задаваемого закона изменения (член f(t)).
Правая часть (9) отображает зависимость упомянутого отклонения от параметров возбудителя колебаний (члены K2, K3, mп, Kп, Fс), параметров, характеризующих движение подвижной системы (члены  и
и  ) и скорости изменения усилия (член
) и скорости изменения усилия (член  ).
).
Из (9) видно, что отклонение в данном случае уже не зависит явно от самого перемещения подвижной системы (отсутствует переменная Хп), не зависит при условии |Fc| = сonst от силы сопротивления движению подвижной системы, не зависит от ускорения движения подвижной системы (отсутствует переменная  ).
).
Но самое главное, что при
K2K3 ≫  +
+  + m
+ m +K
+K , т.е. при большом значении K2K3, отклонение будет мало независимо от членов в правой части неравенства, а также от самих коэффициентов K2 и K3, которые могут изменяться от перемещения подвижной системы вибратора (главное, чтобы K2K3 было большое). Идеализированно при K2K3 -> ∞ отклонение стремится к нулю.
, т.е. при большом значении K2K3, отклонение будет мало независимо от членов в правой части неравенства, а также от самих коэффициентов K2 и K3, которые могут изменяться от перемещения подвижной системы вибратора (главное, чтобы K2K3 было большое). Идеализированно при K2K3 -> ∞ отклонение стремится к нулю.
Таким образом, предлагаемое устройство позволяет повысить точность воспроизведения требуемого значения усилия, прикладываемого к конструкции, при этом уменьшается вредное влияние присоединенной массы, силы сопротивления и упругости вибратора.
Для функционирования возбудителя колебаний можно использовать и другие законы управления вибратором, например,
Uy =  K2sign δUdt (10) где
K2sign δUdt (10) где
signδ U = 

 ± b - порог срабатывания и отпускания релейного элемента 8, на вход которого подается сигнал δ U.
± b - порог срабатывания и отпускания релейного элемента 8, на вход которого подается сигнал δ U.
В этом случае уравнение (8) можно представить в виде
K3 K2sign δUdt = Fk+Fc+m
K2sign δUdt = Fk+Fc+m +KnXn . (11)
+KnXn . (11)
Продифференцировав выражение (11) по времени t, получаем
sign δU = 
 +
+  +m
+m +K
+K (12)
(12)
При большом значении K2K3 правая часть (12) будет близка к нулю, следовательно,
sign δU≈0 (13) Из (13) следует
|δU|≅ |b|, (14)
|f(t) - K1Fк| ≅ |b|, (15)
т. е. ошибка воспроизведения требуемого усилия не превышает заданного значения.
По существу при эксплуатации возбудителей колебаний используется устройство формирования заданного сигнала, а также блок управления вибратором, который выполняет функции усилителя электрического сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗБУДИТЕЛЬ КОЛЕБАНИЙ | 1991 |
|
RU2024329C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1983 |
|
SU1284443A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Система управления | 1984 |
|
SU1242909A1 |
| Устройство для компенсации звукового поля механических конструкций | 1982 |
|
SU1035638A1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА | 1990 |
|
RU2026799C1 |
| Устройство для управления движением космического аппарата вокруг центра масс | 1990 |
|
SU1819834A1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ С РЕГУЛИРУЕМЫМ ЗАКОНОМ КОЛЕБАНИЙ | 1993 |
|
RU2072621C1 |
| УСТРОЙСТВО МАГНИТНОЙ ЗАПИСИ С ДИНАМИЧЕСКИМ ПОДМАГНИЧИВАНИЕМ | 1991 |
|
RU2024964C1 |
| Устройство для компенсации активно-гО TOKA уТЕчКи | 1979 |
|
SU851625A1 |
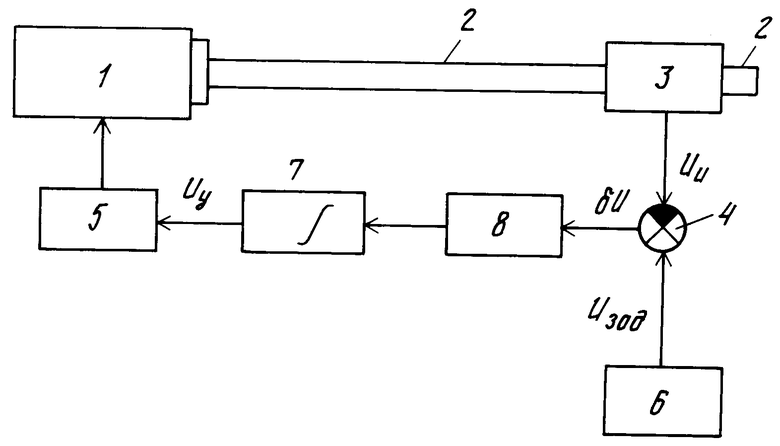
Изобретение относится к технике модальных вибрационных испытаний конструкций. Возбудитель колебаний состоит из вибратора, подвижная часть которого через шток подключается к платформе, на которой установлена испытуемая конструкция, измерителя усилия, установленного на штоке, сумматора, блока управления, устройства формирования заданного сигнала, интегратора и релейного элемента. 1 ил.
ВОЗБУДИТЕЛЬ КОЛЕБАНИЙ, содержащий вибратор, подвижный элемент которого связан со штоком для возбуждения, испытуемой конструкции, устройство формирования заданного сигнала, блок управления, выход которого связан с вибратором, отличающийся тем, что он снабжен измерителем усилия, сумматором, интегратором и релейным элементом, при этом измеритель усилия установлен на штоке, а его выход соединен с первым входом сумматора, к второму его входу подключен выход устройства формирования заданного сигнала, выход сумматора соединен через релейный элемент с входом интегратора, выход которого соединен с входом блока управления.
| R.C | |||
| Lenis and D.L.Wrislu | |||
| A system for the excitation of pure natural modes of complex structire | |||
| - Journal of the aeronautical sciences | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
