Изобретение относится к автоматизированным системам управления и может использоваться при построении технологических комплексов.
Цель изобретения - повышение поне хоустойчивости.
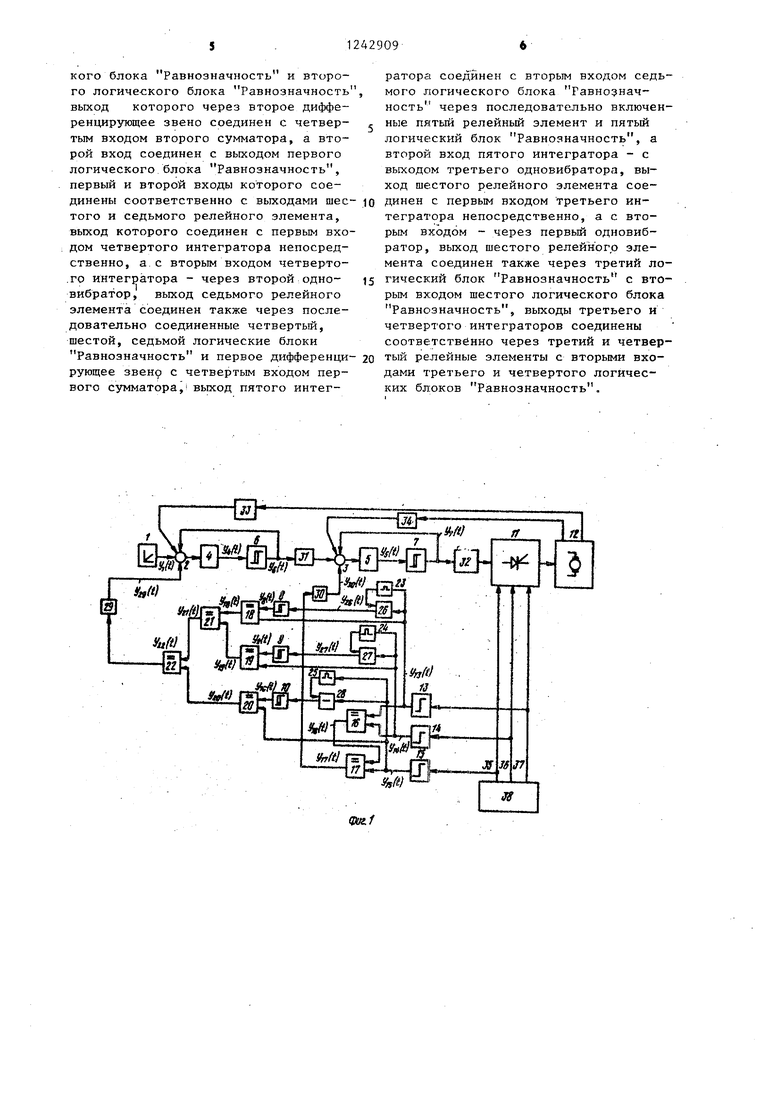
На фиг.1 показана функциональная схема системы управления; на фиг.2 - формы сигналов.
.Система управления содержит задат чик 1, первьй 2, второй 3 И третий 4 сумматоры, первьй.Л, второй 5 интеграторы, первый 6, второй 7, третий 8, четвертый 9 и пятый 10 релейные элементы, тиристорный преобразователь 11, электродвигатель 12, шестой 13, седьмой 14 и восьмой 15 релейные элементы, первый 16, второй 17, третий 18, четвертый 19, пятый 20, шестой 21 и седьмой 22 логические блоки Ра .нозначность, первый 23, второй 24 и .третий 25 одновибраторы, третий 26, четвертьй 27 и пятьш 28 интеграторы, первое 29 и второе 30 дифференцирующие звенья, первый 31 и второй 32 . фильтры, датчик 33 скорости, датчик 34 тока электродвигателя, первый 35,
второй 36 и третий 37 выходы источника 38 трехфазного напряжения питания. Выходной сигнал каждого блока обозна чается как 1, где i, - номер блока. Третий 26, четвертый 27 и пятьй 28 интеграторы имеют установочный вход, подключаемый соответственно к выходу первого 23, второ.го 24 и третьего 25 одновибраторов. При наличии сигнала на установочном входе.выходной сигнал этих интегра торов равен нулю.
С первого по пятый релейные элементы 6,-10 выполнены с симметрич11ыми относительно нуля порогами переключения и неинвертирующей петлей гистерезиса.
Шестой 13, седьмой 14 и восьмой 15 релейные элементы имеют неинвертирующую характеристику и нулевое значение порогов лерёключбния. Их . выходной сигнал также меняется дискретно в пределах А.
Выходной знак блоков, реализующих функцию Равнозначность меняется дискретно в пределах-t А. При этом. знак импульса определяется знаком произведения сигналов на входе блока Вавнозначность.
Система управления работает следующим образом.
Система управления представляет собой двухконтурную систему регулирования, выполненную по принципу подчиненного регулирования параметров электродвигателя 12.
Первьш сумматор 2, первый интегратор 4. первый релейный элемент б в совокупности образуют автоколебательный, каскад с частотно-импульсной модуляцией .
При отсутствии входного сигнала на выходе первого релейного элемента 6 формируется сигнал типа меандр со средним за интервал дискретизации нулевым значением. При этом амплитуда пилообразного выходного сигнала пе р- вогсУ интегратора 4 ограничена порогами переключения iB первого релейного элемента 6. ,
Наличие сигнала на входе первого сумматор.а 2 влечет за собой изменение скважности и периода следования вькодньгх импульсов. В один из циклов развертывающего преобразования темп изменения -выходного напряжения первого интегратора 4 зависит от разности сигналов на выходе задатчика 1 и первого релейного элемента 6, а в пос- ледующем цикле - от суммы этих сигналов,, В результате за период автоколебаний полезная составляющая вы - ходньк импульсов достигает величины, пропорциональной уровню входного воздействия .Б рассматриваемой системе управления регуляторы работают в режиме вынужденной синхронизации,что позволяет преобразовать регулятор из частотно- широтной в широтно-импульсную систему,, динамические, показатели которой не,зависят от величины сигнала управления ,. .
Формирование сигнала несущей (синхронизирующей) частоты для питания регуляторов осуществляется следующим образом. ,
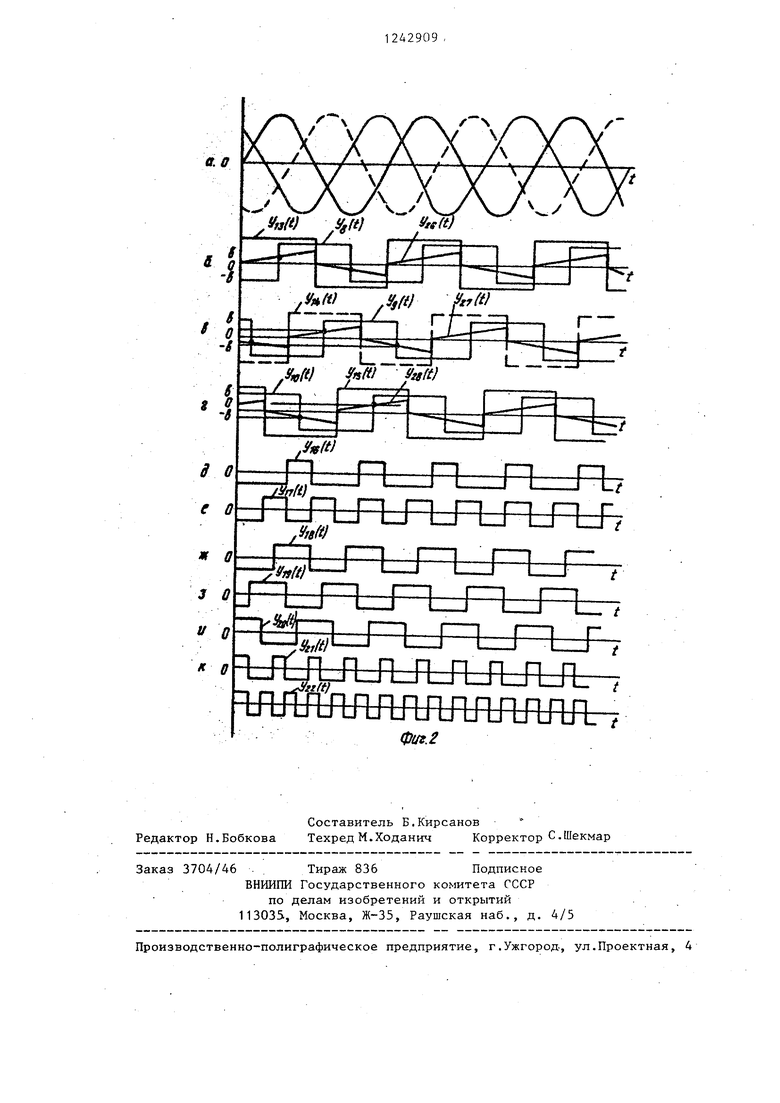
С помощью шестого 13, седьмого 14 и восьмого 15 релейных элементов трехфазное напряжение питания преобразуется в напряжение типа меандр (фиг.З).
Второй блок Равнозначность 17 осуществляет преобразование (сравнение) выходных напряжений первого блока Равнозначность 16 (фиг.2д) и восьмого релейного элемента 15 (фкг.2г), так как знак выходного сигнала блока логической функции Равнозначность соответствует знаку произведения его входных воздействий, то на его выходе формируется сигнал (фиг.2е) со средним нулевым значением, частота которого в 3 раза превышает частоту напряжения питания (фиг.2а). Параметры второго дифферен цирующего звена 30 выбираются так, чтобы пропустить на вход второго 3 сумматора переменную составляющую выходного сигнала второго блока Рав нозначность практически без искажений и подавить постоянную соста.вляю- щую импульсов ), появлениб которой I обусловлено неидеальностью характе- ристик релейных элементов. Тем са- мым исключается ошибка работы регулятора из-за временной и температурной нестабильности характеристик канала формирования сигнала несущей частоты.
Таким образом формируется сигнал несущей частоты для регулятора тока, который по частоте превосходит частоту напряжения питания системы управления в 3 раза (фиг.2а,е).
Порог переключения 1в третьего, например, релейного элемента 8 выбирается так, что его переключение (изменение знака) выходным сигналом третьего интегратора 26 осуществля- ется с фазовым сдвигом на 90 эл. град по отношению к выходному напряжению шестого релейного элемента 13.
Таким же образом на выходе третьего 18, четвертого 19 и пятого 20 бло ков Равнозначность образуется трехфазная система напряжений (фиг.2ж, з,и), аналогичная первичной системе .(фиг.2а), но имеющая частоту 2 ft. В результате сигнал (фиг.2л) имеет нулевое среднее значение и частоту 6 f .
Следовательно, регуляторы системы оказьшаются синхронизированы с частотой питающей сети и имеют соответ- ртвеннно частоты 3fc и 6fc.
Предлагаемое техническое решение позволяет достичь следующих положительных качеств системы управления. Известно, что частотный спектр сиг- налов помех в вентильных электроприводах кратен частоте питающей сети,, т.е. 50 Гц. При синхронизации импульсных регуляторов системы управ
пения с частотой синхронизированной 55 релейных элементов, причем выход
Ь частотой источников помех (сети) полностью исключаются ошибки замедленной дискретизации, возникающие
восьмого релейного элемента соединен с входами третьего одновибратора, пятого интегратора, пятого логичес55 0
5
0
з о
0
5
из-за несовпадения частоты сигнала помехи и частоты несущих колебаний регулятора, которые имеют место в системе управления, где регуляторы функционируют в произвольном по отношению к частоте питающей сети режиме.
Работа одного регулятора с.частотой в 2 раза ниже частоты вынужденных колебаний второго регулятора полностью ликвидирует взаимное влияние развертывающих усилителей. Последнее является следствием того, что полоса пропускания первого регулятора оказывается в 2 раза меньше полосы пропускания второго регулятора и играет роль естественного фильтра для несущих колебаний второго регулятора.
Формула изобретения
Система управления, содержащая ти- ристорный преобразователь, последовательно соединенные задатчик, первый сумматор, первый интегратор и первый релейньй элемент, выход которого соединен с вторым входом первого сумматора, а также последовательно соединенные второй сумматор, второй интегратор и второй релейный эле.ент, выход которого соединен с входом второго сумматора, отличающаяся тем, что, с целью повьшения помехоустойчивости, в нее введены датчик скорости и датчик тока электродвигателя, источник трехфазного напряжения питания, два фильтра, шесть релейных элементов, три интегратора, три одновиб- ратора, семь логических блоков Равнозначность, два дифференцируюш 1Х звена, выход датчика скорости соединен с третьим входом первого сумматора, выход датчика тока электродвигателя соединен с вторым входом второго сумматора, третий вход которого через первый фильтр соединен с вьгходом первого релейного элемента, выход второ- го релейного элемента соединен с входом электродвигателя через последовательно соединенные второй фильтр и тиристорный преобразователь, соединенный с соответствующими выходами источника трехфазного напряжения питания, которые соединены с входами соответственно шестого, седьмого и восьвосьмого релейного элемента соединен с входами третьего одновибратора, пятого интегратора, пятого логического блока Равнозначность и второго логического блока Равнозначность выход которого через второе диффе- ренцирутощее звено соединен с четвер- тым входом второго сумматора, а второй вход соединен с выходом первого логического блока Равнозначность, первый и второй входы которого соединены соответственно с выходами шее того и седьмого релейного элемента, выход которого соединен с первым входом четвертого интегратора непосредственно, ас вторым входом четверто- ,го интегратора - через второй одно- вибратор, выход седьмого релейного элемента соединен также через последовательно соединенные четвертый, шестой, седьмой логические блоки Равнозначность и первое дифференци рующее звенр с четвертым входом первого сумматора, выход пятого интегратора соединен с вторым входом седь мого логического блока Равнозначность через последовательно включенные пятый релейный элемент и пятый логический блок Равнозначность, а второй вход пятого интегратора - с выходом третьего одновибратора, выход шестого релейного элемента соединен с первым входом третьего интегратора непосредственно, а с вторым входом - через первый одновиб- ратор, выход шестого релейного элемента соединен также через третий логический блок Равнозначность с вторым входом шестого логического блока Равнозначность, выходы третьего и четвертого интеграторов соединены соответственно через третий и четвертый релейные элементы с вторыми входами третьего и четвертого логических блоков Равнозначность.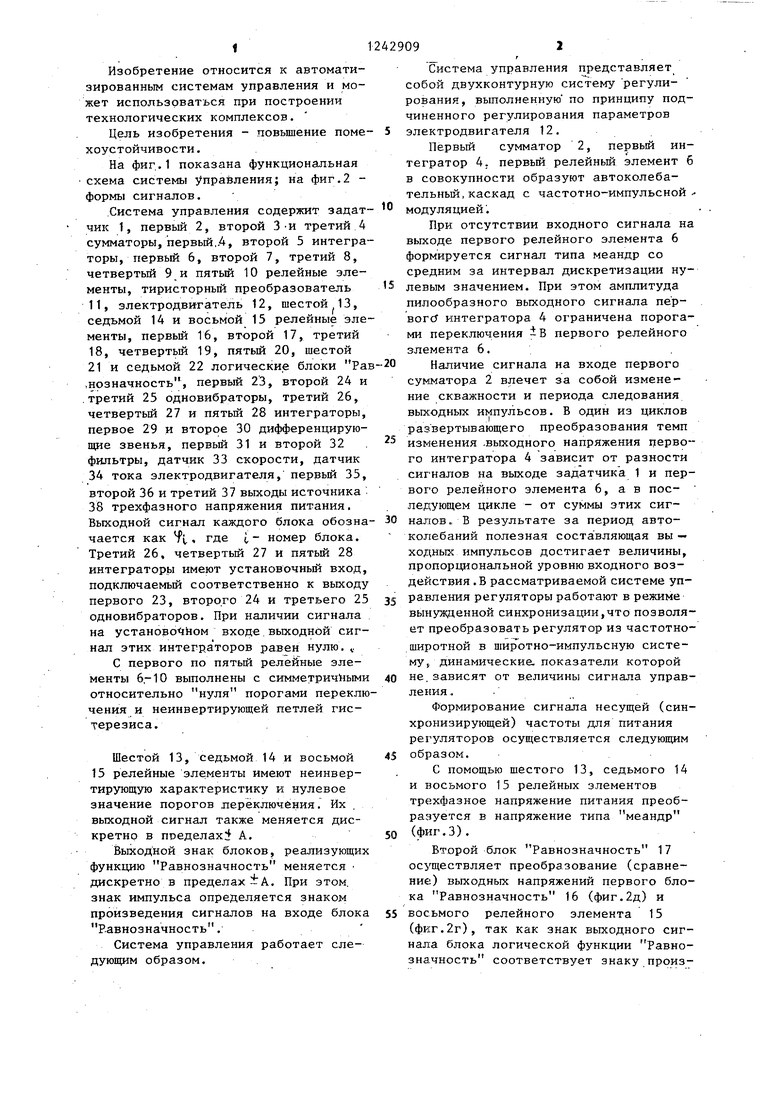

| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХФАЗНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С ЗАЩИТОЙ | 2012 |
|
RU2499347C1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С СИММЕТРИРОВАННОЙ НАГРУЗКОЙ | 2012 |
|
RU2490685C1 |
| ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С РАСПРЕДЕЛЕННОЙ НАГРУЗКОЙ | 2011 |
|
RU2472279C1 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2011 |
|
RU2449456C1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С АВТОМАТИЧЕСКИМ РЕЗЕРВИРОВАНИЕМ КАНАЛОВ РЕГУЛИРОВАНИЯ | 2011 |
|
RU2470360C1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1278806A1 |
| Электропривод с оптимальным управлением | 1987 |
|
SU1534719A1 |
Изобретение относится к автоматизированным системам управления и может быть использовано при построении технологических комплексов. Целью изобретения является повышение помехоустойчивости процесса управления. Система управления содержит задатчик, три сумматора, пять интеграторов, восемь релейных элементов, тиристорнь0 1 преобразователь, электродвигатель, семь логических блоков Равнозначность ;, три одновибратора, два диффе- ренцирующих звена, два фильтра, датчик скорости, датчик тока электродвигателя и источник трехфазного напряжения питания. Сущность изобретения заключается в формировании частоты несущих сигналов регулирования, в три и шесть раз превышающей частоту нап- ряжения питания, что повышает помехоустойчивость процесса управления. 2 ил. (О 1C 4 tc 
0.0
/ / / / / /
OOO(/YX
V
-I
/I
yf ft)
I
) y(t УгвК)
г
то
3о
ио
лff
| Гарнов В.К | |||
| Унифицированные системы автоуправления электроприводом в металлургии.- М.: Металлургия, 1971, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Система управления | 1979 |
|
SU842722A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
