Изобретение относится к машиностроению.
Известно устройство для автоматической компенсации несоосности во внешнем зубчатом зацеплении, включающее два зубчатых венца с бочкообразными зубьями и сферической поверхностью их вершин, втулку с фланцем и самоустанавливающийся подшипник. Один из венцов установлен непосредственно на ведущем валу и находится в зацеплении с зубчатым венцом внутреннего зацепления на ведущем колесе, другой венец размещен на наружной поверхности фланца этой втулки, установленной в полости ведущего колеса, и также находится в зацеплении с соответствующим ему зубчатым венцом внутреннего зацепления этого же ведущего колеса. В полости средней части ведущего колеса размещен самоустанавливающийся подшипник. Указанные зубчатые венцы, втулки и подшипник, встроенные в полости ведущего колеса, в совокупности с ним осуществляют автоматическую компенсацию несоосности во внешнем зубчатом зацеплении [1].
Однако известное устройство конструктивно громоздко, металлоемко, имеет повышенную неуравновешенность, обусловленную несимметричным размещением зубчатых венцов и втулки относительно средней плоскости ведущего колеса.
Известно устройство для автоматической компенсации непараллельности осей колес зубчатой передачи, содержащее зубчатый венец внешнего зацепления с бочкообразной формой зубьев сферической поверхностью их веpшин, выполненный или размещенный на несущем валу колеса. Он сопряжен с зубчатым венцом внутреннего зацепления, встроенным в полости этого же колеса и вращающимся синхронно с валом другого колеса. Сферические поверхности вершин бочкообразных зубьев венца внешнего зацепления первого колеса установлены с натягом на сопрягаемой поверхности впадин зубьев его венца внутреннего зацепления. В средней части полости данного колеса этими сопрягаемыми поверхностями образован сферический подшипник скольжения, который обеспечивает одновременно передачу крутящего момента и компенсацию непараллельности осей колес [2] .
Недостатками известного устройства являются повышенное в зацеплении сопротивление поворачивающему моменту, устраняющему непараллельность осей колес передачи, обусловленное наличием в устройстве подшипника скольжения, и повышенная неуравновешенность.
Задача изобретения - улучшение автоматических компенсирующих свойств устройства для устранения непараллельности осей, конструктивное его упрощение технологичности изготовления, снижение шумности и повышение уравновешенности, а также расширение области его применения.
Это достигается тем, что в известном устройстве для автоматической компенсации непараллельности осей колес, содержащем находящиеся в зацеплении зубчатые колеса, первое изготовлено на валу, а его зубчатый венец выполнен с бочкообразными в сечении поверхностью его делительного цилиндра зубьями и со сферической поверхностью вершин выступов, упомянутый вал установлен на сферических подшипниках, поверхность оснований впадин зубьев первого колеса выполнена сферической, а боковая поверхность его зубьев определена в цилиндрических координатах следующим уравнением:
Z =
=  cos[θ+(tgα-α)];
cos[θ+(tgα-α)];
r =
=  sin[θ+(tgα-α)];
sin[θ+(tgα-α)]; = γi;
= γi;
X =
=  sin[θ+(tgα-α)]sinγi где Zi" ,ri" , γi'' ,Xi" , γi- текущие координаты боковой поверхности бочкообразного зуба:
sin[θ+(tgα-α)]sinγi где Zi" ,ri" , γi'' ,Xi" , γi- текущие координаты боковой поверхности бочкообразного зуба:
rb - радиус основной сферы колес,
θ- угловой параметр, фиксирующий в полуплоскости РОZi ", начало эвольвенты на основной сфере зубчатого колеса, определяющийся по соотношению:
θ=90° -  . где Sо - толщина зуба по дуге основной сферы в полуплоскости POZi ";
. где Sо - толщина зуба по дуге основной сферы в полуплоскости POZi ";
α - угловой параметр в полуплоскости POZi ", назначаемый в пределах изменения модуля полярного радиуса-вектора  от величины, равной радиусу основной сферы rb, до величины, равной радиусу сферы головок зубьев ra;
от величины, равной радиусу основной сферы rb, до величины, равной радиусу сферы головок зубьев ra;
tg α - α = v - угол, определяющий направление радиуса-вектора  .
.
При этом сферическая поверхность, ограничивающая зубья в основаниях их впадин, в указанных координатах записывается так
Zi" = rfcos θ;
ri" = rf sin θ;
γi''=γi
xi = rf sin θ sin γi ; где rf - радиус сферы основания впадины;
θ - текущий угловой параметр, изменяющийся в пределах ширины впадины в основании зубьев.
Аналогично в указанных координатах записываются уравнения сферической поверхности, ограничивающей зубья, и в их вершинах.
Ограничение бочкообразных зубьев поверхностями указанной геометрии и профилирование выпуклого их профиля в средней плоскости заявляемого устройства (где процесс зацепления зубьев колес начинается и полностью заканчивается) посредством дуги эвольвенты окружности, цилиндрические координаты Zi" и ri" которой в системе координат первого колеса определены соотношениями:
Z =
=  cos(θ+V);
cos(θ+V);
r =
=  sin(θ+V), где v = tgα -α - эвольвентная функция, определяющая угловым параметром α в пределах изменения модуля радиуса-вектора
sin(θ+V), где v = tgα -α - эвольвентная функция, определяющая угловым параметром α в пределах изменения модуля радиуса-вектора  от rb до ra.
от rb до ra.
Улучшают автоматические компенсирующие свойства заявляемого устройства, позволяют упростить его конструкцию, снизить шумность при работе, повысить уравновешенность и технологичность изготовления, расширить область применения.
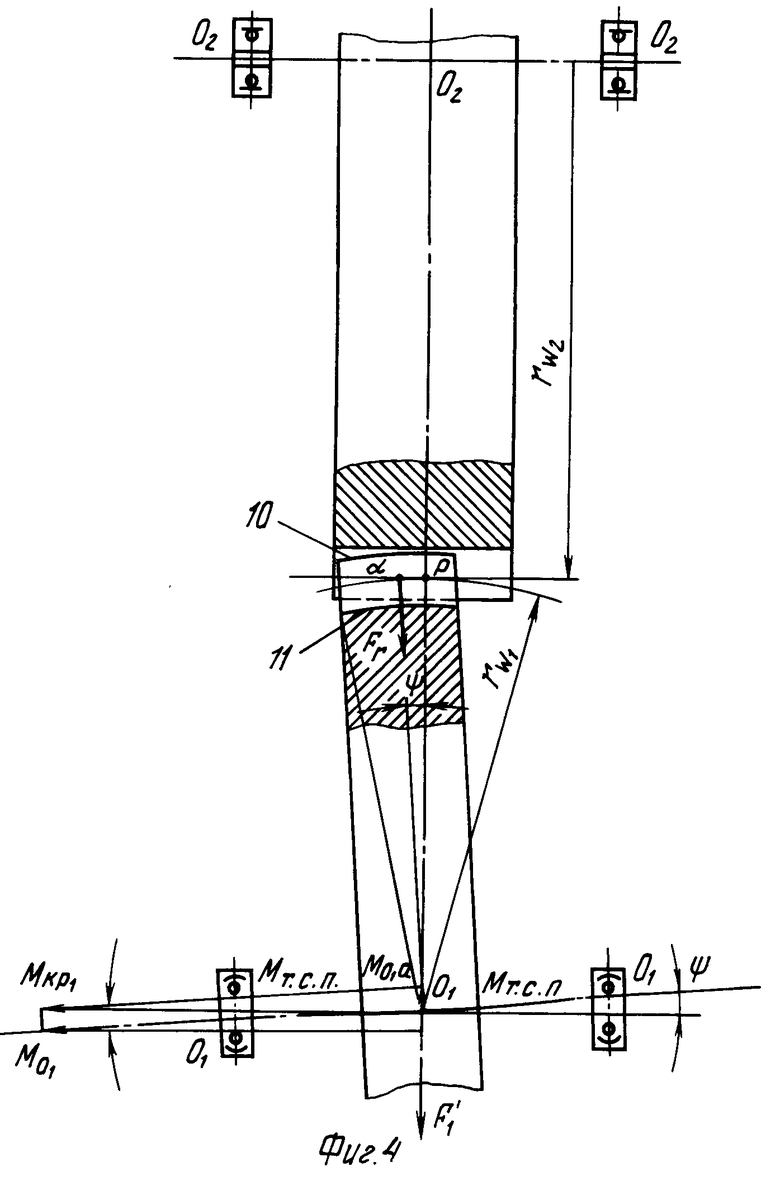
На фиг. 1 показано предлагаемое устройство, вид спереди; на фиг.2 - то же, вид сбоку; на фиг.3 - схемы системы цилиндрических координат Zi" , ri" , γi'' , xi" и очертание зуба ведущего колеса в среднем сечении; на фиг.4 - схема сил и моментов в устройстве; на фиг.5 - зацепляющиеся зубья передачи, продольное сечение.
Устройство для автоматической компенсации непараллельности осей содержит вал 1, уложенный в сферические опоры качения 2, колесо 3 с зубчатым венцом 4 и центром в точке 0, радиусом начальной окружности rwiсидящее на валу, колесо 5 с центром в точке 0 и радиусом начальной окружности rw2 с зубчатым венцом 6, синхронно вращающееся с валом 7, уложенным в радиальных опорах качения 8.
Зубья 9 венца 4 ведущего колеса 3 имеют бочкообразную форму и ограничены в вершинах 10 в основаниях впадин 11 сферическими поверхностями, а с боковых сторон 12 - выпуклой поверхностью вращения (получаемой дугой эвольвенты окружности радиуса), описание которой в цилиндрических координатах (фиг.3) производится указанным уравнением.
Зубья 13 венца 6 колеса 5 имеют прямую форму и ограничены как в вершинах 14, так и в основаниях впадин 15 и с боковых сторон 16 цилиндрическими поверхностями. Оба колеса имеют в среднем сечении передачи выпуклые профили зубьев (соответственно 12 и 16). При этом геометрия боковой поверхности вращения 12 зуба такова (см. фиг.3), что правильное, т.е. эвольвентное, зацепление указанных профилей будет протекать только в средней плоскости передачи.
Устройство работает следующим образом. Крутящий момент Мкр с вала 1, уложенного в сферических опорах качения, передается на колесо 3 с зубчатым венцом 4 и далее через зацепление бочкообразного зуба 9 с прямым зубом 13 - колесу 5 с зубчатым венцом 6, установленному на валу (уложенному в радиальных опорах качения 8).
Если зубья венцов 4 и 6 при передаче крутящего момента контактируют не в средней плоскости передачи (см. фиг.4, 5), а в радиальной плоскости колеса 3, образующей со средней плоскостью некоторый угол Ψ, появляющийся как следствие непараллельности осей колес передачи в силу выхода площадки (из-за возможных погрешностей в геометрии поверхностей зацепляющихся зубьев или сборки устройства) контакта зубьев колес из средней плоскости, то возникает поворачивающий момент, а именно: в плоскости межосевой линии О1О2 т. е. вертикальной он будет равен сумме моментов:
M = M
= M +M
+M где М
где М - момент, возникающий как следствие непараллельности осей колес;
- момент, возникающий как следствие непараллельности осей колес;
МFt - момент окружной силы Ft относительно межосевой линии 0102.
Ему будет противодействовать сопротивление в зацепляющихся зубьях 9 и 13 в форме Мт.к. - момента сил трения качения и Мт.с.п момента трения скольжения в сферических подшипниках опор вала колеса 3. В итоге поворачивающий момент в устройстве в вертикальной плоскости определяется соотношением:
M =M
=M +M
+M -Mт.к-2Mт.с.п
-Mт.к-2Mт.с.п
Для случая непараллельности осей колес в горизонтальной плоскости М будет равен:
будет равен:
M =
= +
+ -Mт.к-2Mт.с.п
-Mт.к-2Mт.с.п
Таким образом, возникающий поворачивающий момент М в устройстве будет поворачивать колесо 3 совместно с валом 1 в сферических опорах качения 2, преодолевая сопротивление качению в зацеплении зубьев 9 и 13 и скольжению в сферических опорах 2, до обеспечения контакта зубьев 9 и 13 в средней плоскости передачи и уменьшения угла непараллельности до минимально допустимой величины.
в устройстве будет поворачивать колесо 3 совместно с валом 1 в сферических опорах качения 2, преодолевая сопротивление качению в зацеплении зубьев 9 и 13 и скольжению в сферических опорах 2, до обеспечения контакта зубьев 9 и 13 в средней плоскости передачи и уменьшения угла непараллельности до минимально допустимой величины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической компенсации непараллельности осей колес зубчатой передачи | 1983 |
|
SU1254227A1 |
| Зубчатый венец | 1987 |
|
SU1481524A1 |
| Зубчатая передача внешнего зацепления | 1988 |
|
SU1677411A1 |
| МАЯТНИКОВЫЙ ГИДРОВОЛНОВОЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА | 2012 |
|
RU2615288C2 |
| РОТОРНАЯ ОБЪЁМНАЯ МАШИНА | 2018 |
|
RU2701306C1 |
| Опорно-поворотное устройство подъемно-транспортной машины | 1979 |
|
SU887443A1 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
| Зубчатая передача | 1984 |
|
SU1240977A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ Абрамова В.А. | 2014 |
|
RU2568626C1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |



Изобретение относится к устройствам с автоматической компенсацией параллельности осей. Технический результат: улучшение компенсации, уравновешенности, конструктивное и технологическое упрощение. Сущность: зубчатый венец 4 с бочкообразной формой зубьев 9 и сферической поверхностью их вершин 10 на одном из колес 3 устройства и сопряженный с ним другой зубчатый венец 6, вращающийся синхронно с валом другого колеса 5. Вал 1 колеса 3 устройства установлен в сферических подшипниках 2, венец 6 - непосредственно на колесе 5, зубья колеса 3 в основаниях впадин ограничены сферическими поверхностями, а с боковых сторон - поверхностями, уравнения которых указаны в ф-ле. Если зубья венцов 4 и 6 при работе контактируют не в средней плоскости передачи, а в радиальной возникает поворачивающий момент, возвращающий зубья 9 и 13 в позицию до их контакта в средней плоскости. Положительный эффект: повышение эффективности эксплуатации и изготовления, расширение области применения. 5 ил.
УСТРОЙСТВО С АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИЕЙ НЕПАРАЛЛЕЛЬНОСТИ ОСЕЙ, содержащее находящиеся в зацеплении зубчатые колеса, первое установлено на валу, а его зубчатый венец выполнен с бочкообразными в сечении поверхностью его делительного цилиндра зубьями и со сферической поверхностью выступов, отличающееся тем, что упомянутый вал установлен на сферических подшипниках, поверхность дна впадин зубьев первого колеса выполнена сферической, а боковая поверхность его зубьев определена в цилиндрических координатах уравнениями
Z =
=  cos[θ+(tgα-α)];
cos[θ+(tgα-α)];
r =
=  sin[θ+(tgα-α)];
sin[θ+(tgα-α)]; = γi
= γi
X =
=  sin[θ+(tgα-α)]sinγi
sin[θ+(tgα-α)]sinγi
где z , r
, r ,
,  , x
, x , γi - текущие координаты поверхности боковой стороны бочкообразного зуба;
, γi - текущие координаты поверхности боковой стороны бочкообразного зуба;
rb - радиус основной сферы колеса;
θ - угловой параметр, фиксирующий в полуплоскости PoZ системы z
системы z , r
, r ,
,  , x
, x начало эвольвенты на основной сфере зубчатого колеса, определяющий по соотношению
начало эвольвенты на основной сфере зубчатого колеса, определяющий по соотношению
θ = 90 -  ,
,
где so - толщина зуба по дуге основной сферы в полуплоскости
PoZ
α - угловой параметр в полуплоскости PoZ назначаемый в пределах изменения модуля полярного радиуса-вектора
назначаемый в пределах изменения модуля полярного радиуса-вектора  величины, равной радиусу основной сферы rb до величины, равной радиусу сферы головок зубьев ra;
величины, равной радиусу основной сферы rb до величины, равной радиусу сферы головок зубьев ra;
tgα-α = v - угол, определяющий направление радиуса-вектора 
| Устройство для автоматической компенсации непараллельности осей колес зубчатой передачи | 1983 |
|
SU1254227A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
