Изобретение относится к измерительной технике и может быть использовано в различных устройствах для индикации и регистрации механических усилий.
В технике известны различные устройства для индикации механических усилий, например, с помощью сложных пружинных (рычажных) или гидравлических преобразователей [1] . Устройства с механическим или гидравлическим преобразованием усилий сложны по конструкции, недостаточно надежны в работе из-за наличия трущихся между собой деталей и не позволяют передавать информацию дистанционно.
Более современными и перспективными устройствами для преобразования механических усилий являются устройства, в основе которых лежит принцип преобразования механических напряжений в пьезоэлектрический сигнал [2]. Хотя устройства с пьезокристаллами просты по конструкции, но для индикации напряжений с пьезоэлементов требуются специальная усилительная аппаратура и индикаторы.
Наиболее близким по технической сущности к изобретению является пьезоэлектрический преобразователь силы, содержащий пьезоэлемент с силовводящими элементами, электроды, расположенные на держателях и включенные в измерительную схему, причем держатели выполнены в виде магнитных чашей с направляющими отверстиями, в которых подвижно установлены штыри с электрически изолированными от них электродами. Данное устройство принимается за прототип [3].
Недостатком данной конструкции является наличие сложной усилительной аппаратуры для измерения сигнала с пьезоэлектрика и невозможность одновременного совмещения в устройстве пьезокерамических силовых преобразователей с индикатором.
Целью изобретения является упрощение конструкции.
Цель достигается тем, что в пьезоэлектрическом преобразователе силы, содержащем пьезоэлемент с силовводящим блоком, электроды, включенные в измерительную схему, и индикаторное устройство, силовводящий блок выполнен в виде опорной шайбы, связанной с рычажным коромыслом, в пазах которого закреплены подвижные ролики, а индикаторное устройство выполнено в виде размещенного в осевом канале прозрачного диэлектрического корпуса конденсатора, между обкладками которого размещена электропроводная частица, при этом одна из обкладок конденсатора является одним из электродов пьезоэлемента и выполнена в виде металлического диска, диаметр которого больше диаметра осевого канала корпуса, а другая обкладка выполнена подвижной и соединена с другим электродом пьезоэлемента.
Снабжение пьезоэлектрического преобразователя силы конденсатором с обкладками, между которыми помещена электропроводная частица, позволяет выполнить преобразование физических эффектов по схеме: МН -> ПЭС -> ЭСП -> АК, (1) т. е. МН -> АК, (2) где МН - механическое напряжение, прикладываемое к преобразователю силы; ПЭС - пьезоэлектрический сигнал на пьезокерамике;
ЭСП - электростатический потенциал на обкладках конденсатора;
АК - автоколебания электропроводной частицы в зазоре конденсатора.
В результате достижения преобразования физических эффектов МН -> АК появляется возможность визуально наблюдать (корпус конденсатора выполнен прозрачным) по скорости перемещения частицы деформацию механических напряжений.
Выполнение одной из обкладок конденсатора в виде стального диска, являющегося опорой силовводящего блока, позволяет уменьшить конструкцию устройства и исключить соединительные провода от преобразователя до индикатора, что значительно упрощает конструкцию устройства в целом и делает его более компактным.
Таким образом, при совокупности последовательного преобразования физических эффектов (выражение (1)) достигается новый положительный эффект преобразования механических усилий в автоколебания электропроводной частицы. Поэтому существенными отличиями устройства от прототипа по принципу действия является преобразование прямого пьезоэффекта в автоколебания частицы, а по конструктивным элементам - выполнение одной из обкладок конденсатора с частицей в виде металлического диска, служащего опорой силовводящего блока, и соединение пьезокерамического элемента параллельно обкладкам конденсатора.
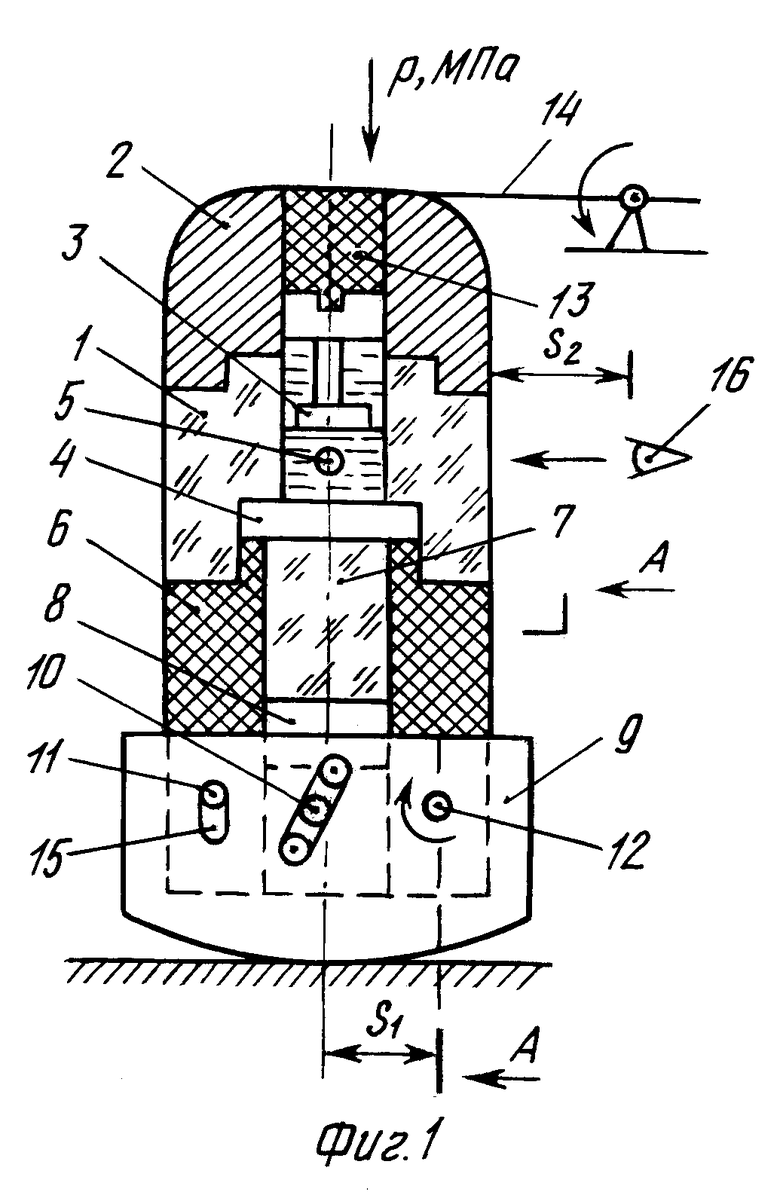
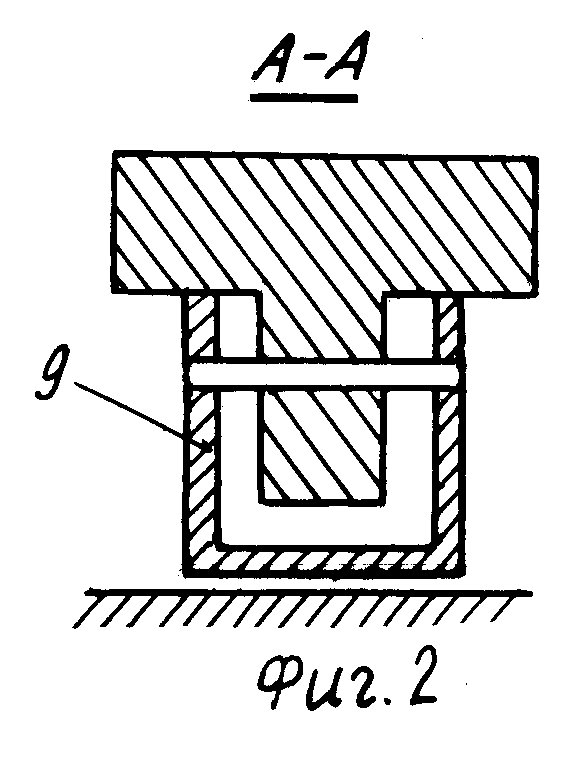
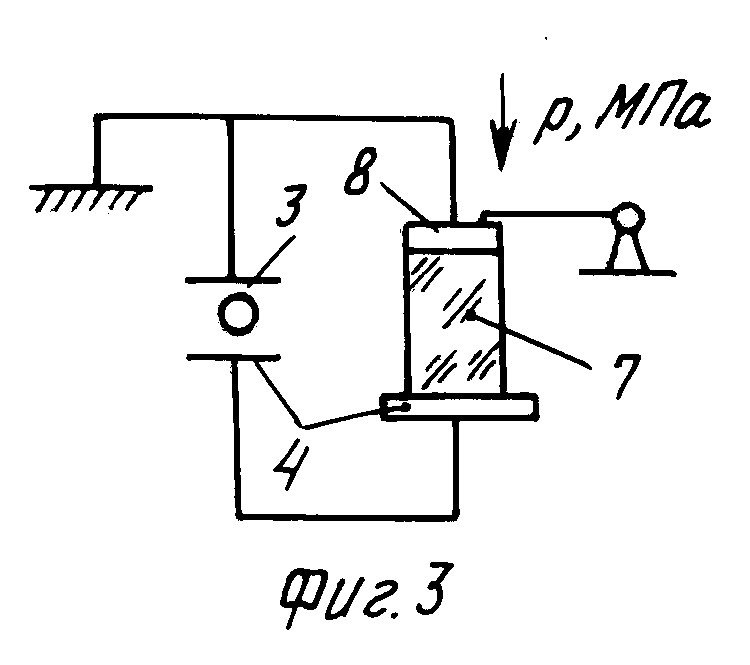
На фиг. 1 представлена конструкция пьезоэлектрического преобразователя силы; на фиг. 2 - сечение А-А на фиг.1; на фиг.3 - его эквивалентная электрическая схема.
Устройство содержит заполненный диэлектрической жидкостью прозрачный (оргстекло) корпус 1, металлическую рабочую часть 2, верхнюю регулирующую обкладку 3 конденсатора, нижнюю обкладку 4, выполненную в виде металлического диска диаметром больше диаметра внутреннего канала корпуса, токопроводящую частицу 5, нижнее основание 6 корпуса 1, выполненное из капролактама, пьезокерамический элемент 7 и силовводящий блок, состоящий из опорной шайбы 8, рычажного коромысла 9, подвижных роликов 10, ограничительного ролика 11 и шарнирного ролика 12. Нижняя обкладка 4 конденсатора является одновременно одним из электродов пьезоэлемента 7. Нижнее основание 6 и рабочая часть 2 соединены с корпусом с помощью резьбы. После настройки устройства подвижной обкладкой 3 на заданное значение механического усилия остаточная часть отверстия рабочего элемента 2 заливается эпоксидным компаундом 13.
Устройство работает следующим образом. Под воздействием механического усилия балкой 14 относительно "земли" на рабочую часть устройства пьезокерамический диск 7 будет подвергаться механическим напряжениям между нижней обкладкой 4, являющейся опорой пьезокерамического диска, и опорной шайбой 8, на которую оказывают усилие подвижные ролики 11, закрепленные в пазах П-образного рычажного механизма 9. Вследствие прямого пьезоэлектрического эффекта на обкладках диска 7 появляются электрические заряды, которые наводят на обкладках 3, 4 конденсатора элэектростатический потенциал, в результате чего частица будет совершать автоколебательное движение до выравнивания потенциала на электродах и при заземлении одной из обкладок до порогового значения срабатывания устройства. Электрическое соединение регулируемой обкладки 3 с металлическим электродом пьезокерамического диска (опорная шайба 8) осуществляется через "землю" (фиг. 3). Ход сжатия (растяжения) диска 7 ограничивается пазом 15, в котором находится ролик 11, закрепленный в основании 6 корпуса. Таким образом, при осуществлении деформации (сжатии) рабочей части 2 устройства относительно опоры рычажного механизма 9 осуществляется процесс автоколебания частицы, перенос электростатических зарядов на "землю" с обкладки 4 и визуализация частицы (глаз 16) через прозрачный корпус 1.
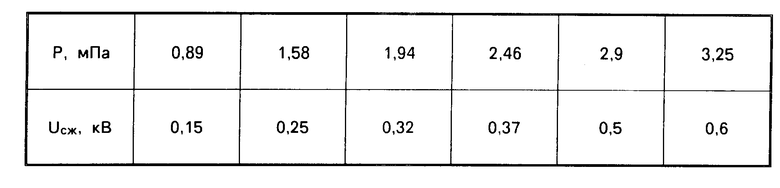
Практическая реализация предлагаемого устройства может осуществляться в различных силовых механизмах. Например, зная зависимость потенциала на электродах пьезокерамического диска при сжатии (Ucж, кВ) от нагрузки на его рабочую часть (Р, МПа), можно с помощью изменения межэлектродного расстояния конденсатора регулируемой обкладкой 3 настроить конденсатор на заданное значение порогового срабатывания (Uпор, кВ), соответствующее значению заданной нагрузки (Рзад, МПа). В этом случае автоколебания частицы начнутся только при нагрузках, превышающих заданную величину, т.е. при Р > Рзад. В таблице приведены результаты тарировки устройства (пьезокерамический диск, ⊘ = 7 мм, l = 15 мм) в функции P = f(Uсж). При изменении нагрузки на рабочую часть от 0,89 до 3,25 МПа потенциал на обкладках конденсатора изменяется от 0,15 до 0,6 кВ. Настроив конденсатор на любое пороговое значение, соответствующее значению Uсж, т. е. Uпор > Uсж, (3) по началу колебания частицы определяется величина нагрузки на рабочую часть. Диапазон нагрузки можно расширить путем расчета или экспериментального варьирования расстояния.
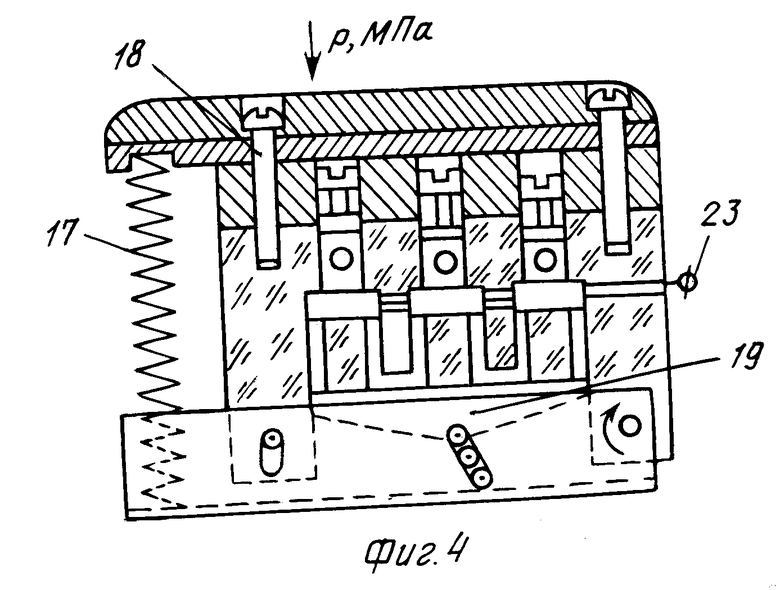
На фиг. 4 представлен вариант конструкции устройства (ручной эспандер для кисти рук) с тремя ячейками индикации, каждая из которых настраивается на заданное значение Uпор.1 > Uпор.2 > Uпор.3. Индикация функции Uсж = f (Р, МПа) осуществляется непосредственно по количеству колеблющихся частиц. Параллельное электрическое соединение пьезокерамических дисков осуществляется металлической пружиной 17, которая может быть и регулятором на заданную нагрузку. Герметичность плоского конденсатора обеспечивается стяжными болтами 18, а давление на пьезокерамические диски осуществляется с помощью конусообразной усеченной с обеих сторон балки 19. Остальные элементы идентичны конструкции устройства на фиг.1.
Имея прозрачный корпус, можно простыми способами с помощью волоконно-оптических световодов передавать информацию дистанционно на любые расстояния, что важно для производств, перерабатывающих пожароопасные материалы. Преобразователь можно использовать в сейсмической технике, а также в геологоразведке для регистрации ударных воздействий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2014 |
|
RU2574868C1 |
| РАСПРЕДЕЛЕННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2016 |
|
RU2657110C2 |
| РАЗРЯДНОЕ ИНДИКАТОРНОЕ УСТРОЙСТВО | 1990 |
|
RU2024220C1 |
| Электростатический разрядник-индикатор | 1988 |
|
SU1669088A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ УСТАНОВОЧНОГО РЕЗОНАНСА ПЬЕЗОЭЛЕКТРИЧЕСКИХ ДАТЧИКОВ | 2000 |
|
RU2176383C2 |
| СПОСОБ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ВИБРОКОНТРОЛЯ | 2008 |
|
RU2393487C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2060506C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ НА ИЗГИБНЫХ КОЛЕБАНИЯХ ДЛЯ ГАЗОВЫХ СРЕД | 1995 |
|
RU2127474C1 |
| Пьезоэлектрический сейсмоприемник | 1980 |
|
SU898365A1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
Сущность изобретения: преобразователь содержит пьезоэлемент с силовводящим блоком, выполненным в виде опорной шайбы, связанной с рычажным коромыслом, в пазах которого закреплены подвижные ролики. Индикаторное устройство выполнено в виде конденсатора, размещенного в осевом канале прозрачного диэлектрического корпуса, между обкладками которого размещена электропроводная частица. Одна обкладка конденсатора является одним из электродов пьезоэлемента и выполнена в виде металлического диска, диаметр которого больше диаметра осевого канала корпуса, а другая обкладка выполнена подвижной и соединена с другим электродом пьезоэлемента. 4 ил., 1 табл.
ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ, содержащий пьезоэлемент с силовводящим блоком, электроды, включенные в измерительную схему, и индикаторное устройство, отличающийся тем, что, с целью упрощения конструкции, силовводящий блок выполнен в виде опорной шайбы, связанной с рычажным коромыслом, в пазах которого закреплены подвижные ролики, а индикаторное устройство выполнено в виде размещенного в осевом канале прозрачного диэлектрического корпуса конденсатора, между обкладками которого размещена электропроводная частица, при этом одна из обкладок конденсатора является одним из электродов пьезоэлемента и выполнена в виде металлического диска, диаметр которого больше диаметра осевого канала корпуса, а другая обкладка выполнена подвижной и соединена с другим электродом пьезоэлемента.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пьезоэлектрический преобразователь силы | 1986 |
|
SU1397754A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
