Изобретение относится к измерительной технике и может быть использовано в различных отраслях промышленности (машиностроение, химической, горнодобывающей и др.) для дистанционной индикации и регистрации механических усилий, в частности для диагностики и мониторинга напряженно-деформированного состояния массива горных пород в окрестностях капитальных, очистных и подготовительных горных выработок, целиков, а также при техносферных и природных чрезвычайных ситуаций.
Известны различные устройства для индикации механических усилий, например, с помощью сложных пружинных (рычажных) или гидравлических преобразователей [1]. Устройства с механическим или гидравлическим преобразователем усилий сложны по конструкции, недостаточно надежны в работе из-за наличия трущихся между собой деталей и не позволяют передавать информацию дистанционно.
Более современными и перспективными устройствами для преобразования механических усилий являются устройства, в основе которых лежит принцип преобразования механических напряжений в пьезоэлектрический сигнал [2]. Хотя устройства с пьезокристаллами просты по конструкции, но для индикации напряжений с пьезоэлементов требуется специальная усилительная и регистрирующая аппаратура.
Кроме пьезопреобразователей, для измерения деформации широко используются тензометрические преобразователи, например, для слежения за изменениями горного давления в массиве пород, непосредственно при ведении горных работ и в режиме долгосрочных наблюдений, используются датчики с тензометрической сборкой типа КФ5М-10-200-Н-12 (набор из четырех тензорезисторов). Данными датчиками совместно с высокоточной тензоаппаратурой проведена диагностика горных массивов угольного бассейна Кузбасса и разработаны методики безопасных работ [3]. Существенным недостатком тензометрических измерений является наличие аналоговой электрической связи между датчиками и измерительной аппаратурой. Соединительную линию из электрических проводников необходимо прокладывать на большие расстояния от места установки датчика в массиве горной породы до пункта измерения, находящегося на поверхности массива. При этом к линии соединения предъявляются жесткие требования: необходимая изоляция от влаги, механическая прочность и помехозащищенность. Кроме этого для измерения параметров деформации требуется высокоточная, дорогостоящая сложная аппаратура. Все перечисленные конструкции имеют ограниченное применение для измерения деформации в подземных коммуникациях при значительном удалении датчика измерения от аппаратуры преобразования данных и, соответственно, обеспечивают получение информации при ограничении линий передачи сигнала.
Наиболее близким по технической сущности к предлагаемому техническому решению для измерения механических усилий является пьезоэлектрический преобразователь силы [4, прототип] с дискретным выходным сигналом. Данное устройство содержит пьезоэлемент с силовводящим блоком, выполненным в виде опорной шайбы, связанной с рычажным коромыслом, в пазах которого закреплены подвижные ролики и индикаторное устройство, выполненное в виде размещенного в осевом канале прозрачного диэлектрического корпуса конденсатора, между обкладками которого размещена электропроводная частица, при этом одна из обкладок конденсатора является одним из электродов пьезоэлемента и выполнена в виде металлического диска, диаметр которого больше диаметра осевого канала корпуса, а другая обкладка выполнена подвижной и соединена с другим электродом пьезоэлемента.
Устройство работает следующим образом. Под воздействием механического усилия штангой 14 относительно «земли» на рабочую часть устройства пьезокерамический диск 7 будет подвергаться механическим напряжениям между нижней обкладкой 4, являющейся опорой пьезокерамического диска, и опорной шайбой 8, на которую оказывают усилие подвижные ролики 11, закрепленные в пазах П-образного рычажного механизма 9. Вследствие прямого пьезоэлектрического эффекта на обкладках диска 7 появляются электрические заряды, которые наводят на обкладках 3, 4 конденсатора электростатический потенциал, в результате чего частица будет совершать автоколебательное движение до выравнивания потенциала на электродах и при заземлении одной из обкладок до порогового значения срабатывания устройства. Электрическое соединение регулируемой обкладки 3 с металлическим электродом пьезокерамического диска (опорная шайба 8) осуществляется через «землю» (фиг. 1). Ход сжатия (растяжения) диска 7 ограничивается пазом 15, в котором находится ролик 11, закрепленный в основании 6 корпуса. Таким образом, при осуществлении деформации (сжатии) рабочей части 2 устройства относительно опоры рычажного механизма 9 осуществляется процесс автоколебания частицы, перенос электростатических зарядов на «землю» с обкладки 4 и визуализация частицы оператором через прозрачный корпус 1.
Снабжение пьезоэлектрического преобразователя силы конденсатором с обкладками и частицей позволяет выполнить преобразование физических эффектов по схеме:

где МН - механическое напряжение, прикладываемое к преобразователю силы; ПЭЗ - пьезоэлектрический заряд (плотность электростатических зарядов) на пьезоэлементе; ЭСП - электростатический потенциал на обкладках конденсатора; АК - автоколебания электропроводной частицы в зазоре конденсатора; ВНЧ - визуальное наблюдение частицы. В конечном счете, данное преобразование выполняется по схеме:

Достоинством данного преобразователя является то, что практическая реализация его может осуществляться в различных силовых механизмах без использования сложных пружинных, пневматических или других устройств. Например, зная зависимость потенциала на электродах пьезокерамического диска при сжатии (UСЖ, В) от нагрузки на рабочую часть (P, МПа), можно с помощью изменения межэлектродного расстояния конденсатора регулируемой обкладкой 3 настроить конденсатор на заданное значение порогового срабатывания (UПОР, В), соответствующее значению заданной нагрузки (PЗАД МПа). В этом случае автоколебания частицы начнутся только при нагрузках, превышающих заданную величину, т.е. при P>PЗАД.
Недостатком данной конструкции является невозможность дистанционного визуального наблюдения по скорости перемещения частицы деформации механических напряжений, что очень важно при измерении параметров деформации как в подземных выработках, так и во взрывопожароопасных помещениях, где наличие персонала ограничено. Кроме этого отмечается недостаточная чувствительность устройства при использовании одного пьезоэлемента.
Задачей заявляемого технического решения является создание устройства, работающего на принципе последовательного преобразования механических усилий в автоколебания частицы, позволяющего осуществлять дистанционное измерение деформации механических усилий за счет использования дискретной оптической передачи информации, а также увеличение чувствительности устройства за счет введения в его корпус дополнительного пьезоэлемента.
Технический результат: расширение функциональных возможностей, повышение чувствительности и помехозащищенности.
В предлагаемом техническом решении в осевой канал корпуса известного пьезоэлектрического преобразователя, содержащего пьезоэлемент с силовводящим блоком, электроды, включенные в электрическую схему, и индикаторное устройство в виде прозрачного корпуса, с размещенным в нем конденсатором с электропроводной частицей между его обкладками, введены дополнительно оптические световоды, закрепленные по центру конденсатора заподлицо на внутренней поверхности корпуса ортогонально траектории частицы, и второй цилиндрический пьезоэлемент, соединенный торцевой поверхностью с верхней обкладкой конденсатора, а противоположной - с подвижной опорной шайбой и с нижней обкладкой первого пьезоэлемента, причем пьезоэлементы прямого действия расположены в канале корпуса полюсами с последовательным направлением.
В результате преобразования в прототипе физических эффектов МН→ВНЧ (1, 2) возможно наблюдать автоколебания частицы только визуально, а введение в корпус оптических световодов с использованием источника света и фоторегистратора позволяет получать информацию по изменению деформации дистанционно. В этом случае последовательное преобразование физических величин в устройстве будет выполняться по схеме:

где ДИД - дистанционное измерение деформации.
В результате достижения преобразования физических эффектов по схеме МН→ВНЧ+ДИД появляется возможность не только наблюдать визуально автоколебания частицы и, соответственно, наблюдать процесс изменения деформации (ВНЧ), но и одновременно измерять параметры деформации дистанционно (ДИД) на большие расстояния по цепи: источник света - входной световод - электропроводная частица - выходной световод - фоторегистратор.
При конструктивном решении введения световодов в корпус конденсатора преобразователя силы достигается технический результат: расширение функциональных возможностей устройства за счет дистанционного измерения параметров деформации. Введение в корпус преобразователя второго пьезоэлемента с расположенными в канале корпуса полюсами прямого действия с последовательным направлением позволяет увеличить чувствительность устройства вдвое, так как к обкладкам конденсатора, в этом случае, второй идентичный пьезоэлемент как источник электрической энергии подключен к первому последовательно.
Техническое решение поясняется функциональной схемой.
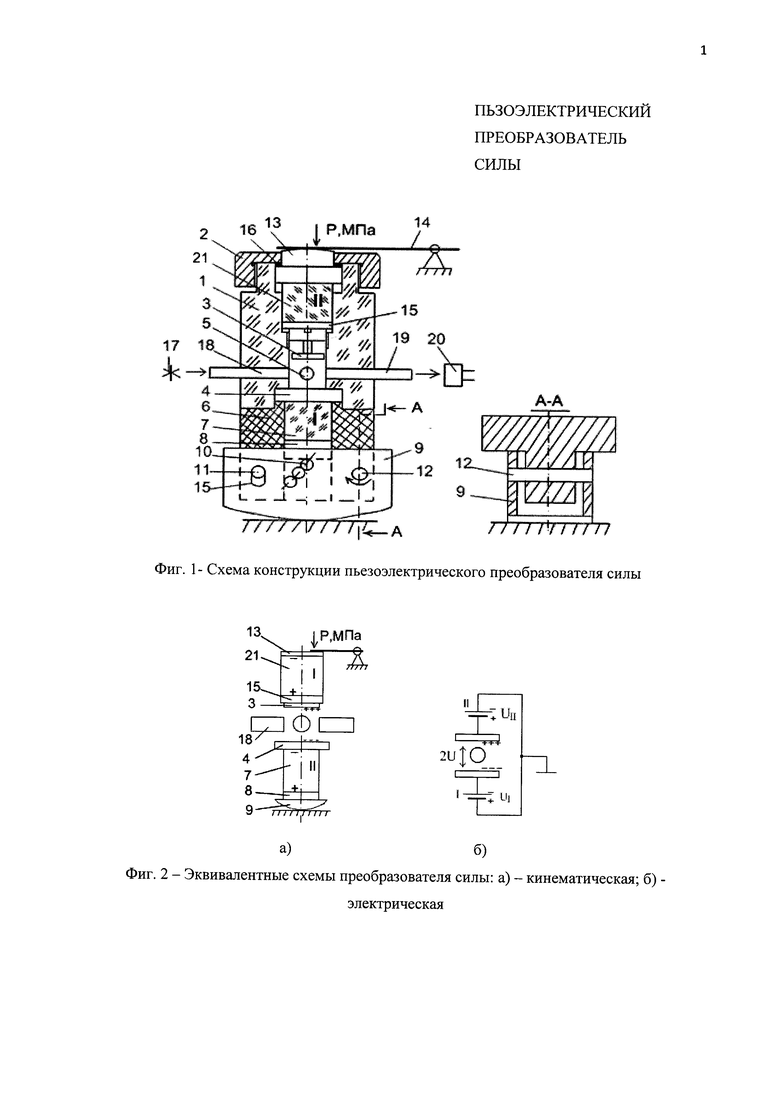
Заявляемое устройство (фиг. 1) содержит заполненный диэлектрической жидкостью прозрачный (оргстекло) корпус 1, металлическую рабочую часть 13 в виде цилиндрического диска, крышку 2, верхнюю регулирующую обкладку 3 конденсатора, токопроводящую частицу 5, нижнее диэлектрическое основание 6 корпуса 1, пьезокерамический элемент 7, силовводящий блок, состоящий из опорной шайбы 8, рычажного коромысла 9, подвижных роликов 10, ограничительного ролика 11 и шарнирного ролика 12. Нижняя обкладка 4 конденсатора является одновременно одним из электродов пьезоэлемента 7. Нижнее основание 6 и крышка 2 соеденены с корпусом с помощью резьбы. В корпус 1 дополнительно введены оптический световод 18 для передачи света от источника 17 в канал корпуса, световод 19 для передачи света из канала в светоприемник 20 и второй пьезоэлемент 21, установленный между промежуточным электродом 15 и металлической рабочей частью 13.
В качестве источника излучения 17 используется светодиод АЛ-107 или галогеновый источник света, а в качестве приемника излучения - фотоэлемент ФД-6К. В качестве второго пьезоэлемента использован идентичный первому цилиндрический сегнетоэлектрик титанат бария BaТiO3. Электрическое соединение нижнего торца первого (I) пьезоэлемента с верхним торцом второго пьезоэлемента (II) осуществляется по цепи: нижний торец первого пьезоэлемента - опорная металлическая шайба 8 - рычажной механизм 9 - «земля» - металлическая штанга 14 - металлическая рабочая часть 13 - верхний торец второго пьезоэлемента. При монтаже устройства в металлическом оборудовании электрическая связь рабочей части 13 с рычажным механизмом 9 осуществляется за счет электропроводимости оборудования.
Устройство работает следующим образом. Под воздействием механического усилия штангой 14 относительно «земли» на рабочую часть 13 устройства оба пьезокерамических диска будут равномерно подвергаться механическим напряжениям (первый I между опорной шайбой 8 и нижней обкладкой 4 конденсатора, а второй II между рабочей частью 13 и электродом 15). При расположении пьезоэлементов полюсами с последовательным направлением (см. фиг. 2а), вследствие прямого пьезоэлектрического эффекта, на обкладках обоих пьезоэлементов появятся электрические заряды, которые наводят на обкладках конденсатора электростатический потенциал (UI - потенциал первого пьезоэлемента I; UII - потенциал второго пьезоэлемента II). Поскольку электрическое соединение пьезоэлементов и конденсатора является последовательным (см. фиг. 26), то на обкладках конденсатора напряжение будет равно как UC=UI+UII=2U, т.е. потенциал на конденсаторе будет в два раза выше по сравнению с прототипом. Под воздействием электростатического поля в межэлектродном пространстве частица 5 будет совершать колебательное движение, периодически касаясь обкладок конденсатора до выравнивания потенциала на электродах до порогового значения срабатывания устройства. В момент прохождения частицы через траекторию распространения светового пучка часть света будет отражаться от зеркальной поверхности частицы. При этом происходит кратковременное изменение светового потока, поступающего во второй световод 19. Таким образом, излучение, идущее от источника света 17 по световоду к фоторегистратору 20, будет периодически изменяться при движении частицы, что несет информацию о ее колебательном движении и, следовательно, информацию об изменении деформации, что повышает функциональные возможности устройства (за счет приобретения возможности дистанционного измерения деформации), повышает помехоустойчивость (за счет замены электоропроводников на световоды).
Поскольку частота колебания частицы fЧ прямо пропорциональна наведенному от пьезоэлементов электростатическому потенциалу U на обкладках конденсатора согласно [5], то величина деформации будет пропорциональна модуляции светового потока, который светоприемником преобразуется в электрический сигнал известными способами.

где U - напряжение между обкладками конденсатора; d - расстояние между обкладками конденсатора; ε0 - диэлектрическая постоянная; ε - относительная диэлектрическая проницаемость жидкого диэлектрика между обкладками конденсатора; γc - плотность проводящей сферической частицы; r - радиус частицы.
Предлагаемое устройство найдет широкое применение в угледобывающей и нефтеперерабатывающей промышленностях в горных выработках, так как, по сравнению с другими аналогами, является пожаровзрывобезопасным. Устройство не имеет внешних подводящих электрических источников энергии (кроме света), а энергия от пьезоэлементов мгновенно переносится частицей на землю. Кроме того, использование преобразования световой энергии в дискретный сигнал дает возможность наиболее достоверно передавать и обрабатывать полученную информацию.
Литература
1. Маликов С.Ф. Введение в технику измерений. М.: Государственное научно-техническое издательство машиностроительной литературы, 1959, с. 178.
2. Ультразвуковые преобразователи. Пер. с анг. под ред. Е. Кикучи, М., 1972. 424 С.
3. Лаврик В.Г., Михеев О.В., Казанцев В.Г. Диагностика и управление состоянием массива горных пород. - М.: Издательство MAC, 2006. - С. 300.
4. Патент РФ №2025677 (прототип).
5. Авторское свидетельство СССР №665270.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛЕННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2016 |
|
RU2657110C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 1991 |
|
RU2025677C1 |
| Электростатический разрядник-индикатор | 1988 |
|
SU1669088A1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 1993 |
|
RU2113757C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИБОР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2011 |
|
RU2472253C1 |
| Пьезопреобразователь | 1990 |
|
SU1732195A1 |
| Пьезоэлектрический акселерометр | 2016 |
|
RU2627571C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2150117C1 |
| Пьезоэлектрический акселерометр центростремительного ускорения | 2023 |
|
RU2804832C1 |
Изобретение относится к измерительной технике и может быть использовано в различных отраслях промышленности (машиностроение, химической, горнодобывающей и др.) для дистанционной индикации и регистрации механических усилий, в частности для диагностики и мониторинга напряженно-деформированного состояния массива горных пород в окрестностях капитальных, очистных и подготовительных горных выработок, целиков, а также при техносферных и природных чрезвычайных ситуациях. Техническим результатом является расширение функциональных возможностей, повышение чувствительности и помехозащищенности. Пьезоэлектрический преобразователь силы содержит два пьезоэлемента прямого действия с полюсами последовательного направления, силовводящий блок, электроды, включенные в электрическую схему, и индикаторное устройство в виде прозрачного корпуса с размещенным в нем конденсатором с электропроводной частицей между его обкладками и оптические световоды для дискретной дистанционной передачи информации. 2 ил.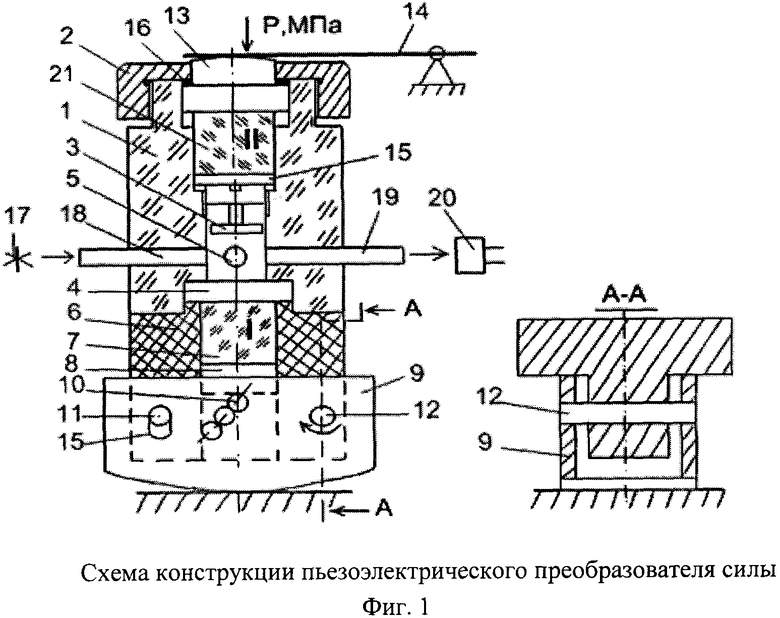
Пьезоэлектрический преобразователь силы, содержащий пьезоэлемент с силовводящим блоком, электроды, включенные в электрическую схему, и индикаторное устройство в виде прозрачного корпуса с размещенным в нем конденсатором с электропроводной частицей между его обкладками, отличающийся тем, что в корпус преобразователя дополнительно введены оптические световоды, закрепленные по центру конденсатора заподлицо на внутренней поверхности корпуса ортогонально траектории частицы, и второй цилиндрический пьезоэлемент, соединенный торцевой поверхностью с верхней обкладкой конденсатора, а противоположной - с подвижной опорной шайбой и с нижней обкладкой первого пьезоэлемента, причем пьезоэлементы прямого действия расположены в канале корпуса полюсами с последовательным направлением.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 1991 |
|
RU2025677C1 |
| RU 2004913 C1 15.12.1993 | |||
| Преобразователь постоянного электрического напряжения в импульсный сигнал | 1976 |
|
SU665270A1 |
| Датчик усилия | 1984 |
|
SU1234733A1 |
| Датчик усилий | 1972 |
|
SU461322A1 |
| Способ определения толщины граничных смазочных пленок при испытаниях материалов зубчатых передач | 1990 |
|
SU1793197A1 |

