Изобретение относится к измерительной технике и может быть использовано в различных отраслях промышленности (горнодобывающей, нефтегазовой, машиностроения, химической и др.) для дистанционной индикации и регистрации механических усилий, в частности, для диагностики и мониторинга напряженно - деформированного состояния массива горных пород в окрестностях капитальных, очистных и подготовительных горных выработок, целиков, а также при техносферных и природных чрезвычайных ситуаций.
Известны различные устройства для индикации механических усилий, например, с помощью сложных пружинных (рычажных) или гидравлических преобразователей [1]. Устройства с механическим или гидравлическим преобразователем усилий сложны по конструкции, недостаточно надежны в работе из-за наличия трущихся между собой деталей и не позволяют передавать информацию дистанционно.
Более современными и перспективными устройствами для преобразования механических усилий являются устройства, в основе которых лежит принцип преобразования механических напряжений в пьезоэлектрический сигнал [2]. Хотя устройства с пьезокристаллами просты по конструкции, но для дистанционной индикации сигналов с пьезоэлементов требуется специальная электронная усилительная и регистрирующая аппаратура.
Кроме пьезопреобразователей, для измерении деформации широко используются тензометрические преобразователи, например, для слежения за изменениями горного давления в массиве пород, непосредственно при ведении горных работ и в режиме долгосрочных наблюдений используются датчики с тензометрической сборкой типа КФ5М-10-200-Н-12 (набор из четырех тензорезисторов). Данными датчиками совместно с высокоточной тензоаппаратурой проведена диагностика горных массивов угольного бассейна Кузбасса и разработаны методики безопасных работ [3]. Недостатком тензометрических измерений является наличие аналоговой электрической связи между датчиками и измерительной аппаратурой. Соединительную линию из электрических проводников необходимо прокладывать на большие расстояния от места установки датчика в массиве горной породы до пункта измерения находящегося на поверхности массива. При этом к линии соединения и датчикам предъявляются жесткие требования: необходимая изоляция от влаги, механическая прочность, помехозащищенность и взрывозащита. Кроме этого для измерения параметров деформации требуется высокоточная, дорогостоящая сложная аппаратура. Все перечисленные конструкции имеют ограниченное применение для измерения деформации в подземных коммуникациях при значительном удалении датчика измерения от аппаратуры преобразования данных и, соответственно, обеспечивается получение информации при ограничении линий передачи сигнала.
Существенным недостатком выше изложенных аналогов является, также, использование волоконно-оптических систем измерения, где измеряемый оптоволоконными датчиками параметр преобразуется в оптический сигнал, передающийся по оптоволокну. В связи с тем, что вычислительные сети используются для передачи данных на большие расстояния, то стремятся минимизировать количество световодов в кабеле в целях экономии. Поэтому разрабатываются технологии, которые позволяют передавать по одному и тому же каналу связи сразу несколько потоков данных. Для этих целей используется метод мультиплексирования (англ. multiplexing, muxing - процесс уплотнение канала), позволяющий осуществлять передачу нескольких потоков (каналов) данных с меньшей скоростью (пропускной способностью) по одному каналу связи, с использованием специальных мультиплексоров (MUX) и демультиплексоров (DMX), т.е. комбинированных устройств, обеспечивающих передачу в желаемом порядке цифровой информации, поступающей по нескольким входам на один выход. Метод может быть реализован как аппаратно, так и программно. Для уплотнения канала связи, в основном, используют временное, частотное, волновое мультиплексирование и множественный доступ с кодовым разделением.
По локализации измеряемого параметра оптоволоконные датчики подразделяются на [4]: точечные - датчики, отвечающие за измерения непосредственно в одной локальной точке; распределенные - датчики, представляющие результаты измерений вдоль протяженной системы, существенно большей, чем в точечном случае и квазираспределенные - представляют собой сеть точечных элементов, каждый из которых снимает показания в своей точке привязки. Для исследования многоточечных объектов в нефтегазовой промышленности и в других областях промышленности наиболее широко используются распределенные волоконно-оптические датчики давления с использованием физических свойств оптического волокна. Интегрирование в распределительные измерительные линии с одним общим световодом амплитудных, поляризационных, фазовых и нелинейно-оптических волоконных датчиков сопровождается сложнейшей электронной аппаратурой [5] и обслуживанием квалификационным персоналом, что не всегда оправдывается при выявлении аварийных техногенных участков и принятии оперативных решений по ликвидации аварийных ситуаций при проведении горных работ. Поэтому разработка устройства, простого по конструкции и обслуживанию, а также недорогого по экономическим затратам для измерения давления в нескольких точках по одному каналу является важной задачей.
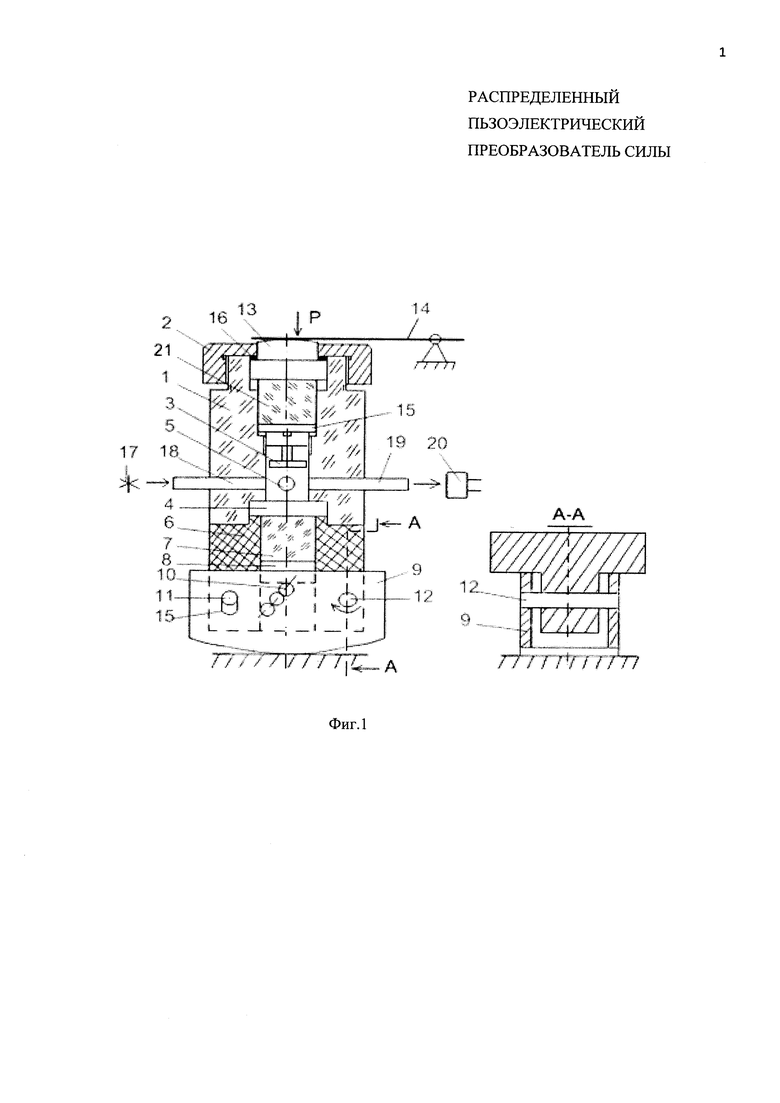
Наиболее близким по технической сущности к предлагаемому техническому решению для измерения дистанционных механических усилий в пожаровзрывоопасных производствах является пьезоэлектрический преобразователь силы [6, прототип] с дискретным выходным сигналом с использованием волоконно-оптических световодов. Данное устройство (фиг. 1, прототип) содержит два пьезоэлемента прямого действия с расположением в канале корпуса полюсами последовательным направлением, силоввводящий блок, электроды, включенные в электрическую схему, индикаторное устройство в виде прозрачного корпуса с размещенным в нем конденсатором с электропроводной частицей между его обкладками и оптические световоды, закрепленные по центру конденсатора заподлицо на внутренней поверхности корпуса ортогонально траектории частицы.
В прототипе последовательное преобразование физических величин в устройстве выполнятся по схеме:

т.е. 
где МН - механическое напряжение, прикладываемое к преобразователю силы; ПЭЗ -пьезоэлектрический заряд (плотность электростатических зарядов) на пьезоэлементах; ЭСП - электростатический потенциал на обкладках конденсатора; АК - автоколебания электропроводной частицы в зазоре конденсатора; ВНЧ - визуальное наблюдение частицы; ДИД - дистанционное измерение деформации.
В результате преобразования физических эффектов по схеме МН → ВНЧ → ДИД появляется возможность не только наблюдать визуально автоколебания частицы и, соответственно, наблюдать процесс изменения деформации (ВНЧ), но и одновременно измерять параметры деформации дистанционно (ДИД) на большие расстояния по цепи: источник света - входной световод - электропроводная частица - выходной световод - фоторегистратор.
Конструктивно устройство (фиг. 1, прототип) содержит заполненный диэлектрической жидкостью прозрачный (оргстекло) корпус 1; металлическую рабочую часть 13 в виде цилиндрического диска; крышку 2; уплотнительную резиновую шайбу 16; верхнюю регулирующую обкладку 3 конденсатора; токопроводящую частицу 5; нижнее диэлектрическое основание 6 корпуса 1; первый нижний пьезоэлемент 7; второй верхний пьезоэлемент 21, установленный между промежуточным электродом 15 и металлической рабочей частью 13; силовводящий блок, состоящий из опорной шайбы 8, рычажного коромысла 9, подвижных роликов 10, ограничительного ролика 11 и шарнирного ролика 12. Нижняя обкладка 4 конденсатора является одновременно одним из электродов пьезоэлемента 7. Нижнее основание 6 и крышка 2 соединены с корпусом с помощью резьбы. Для дистанционной передачи информации в корпусе 1 закреплены: оптический вводный световод 18 для передачи света от источника излучения 17 в канал корпуса и выходной световод 19 для передачи света из канала в светоприемник 20. В качестве источника излучения 17 используется светодиод АЛ-107 или галогеновый источник света, а в качестве приемника излучения - фотоэлемент ФД-6К. В качестве второго пьезоэлемента использован идентичный первому цилиндрический сегнетоэлектрик титанат бария ВаТiO3. Электрическое соединение нижнего торца нижнего 7 пьезоэлемента с верхним торцом верхнего пьезоэлемента 21 осуществляется по цепи: нижний торец первого пьезоэлемента - опорная металлическая шайба 8 - рычажной механизм 9 - «земля» - металлическая штанга 14 - металлическая рабочая часть 13 -верхний торец второго пьезоэлемента. При монтаже устройства в металлическом оборудовании электрическая связь рабочей части 13 с рычажным механизмом 9 осуществляется за счет электропроводимости оборудования.
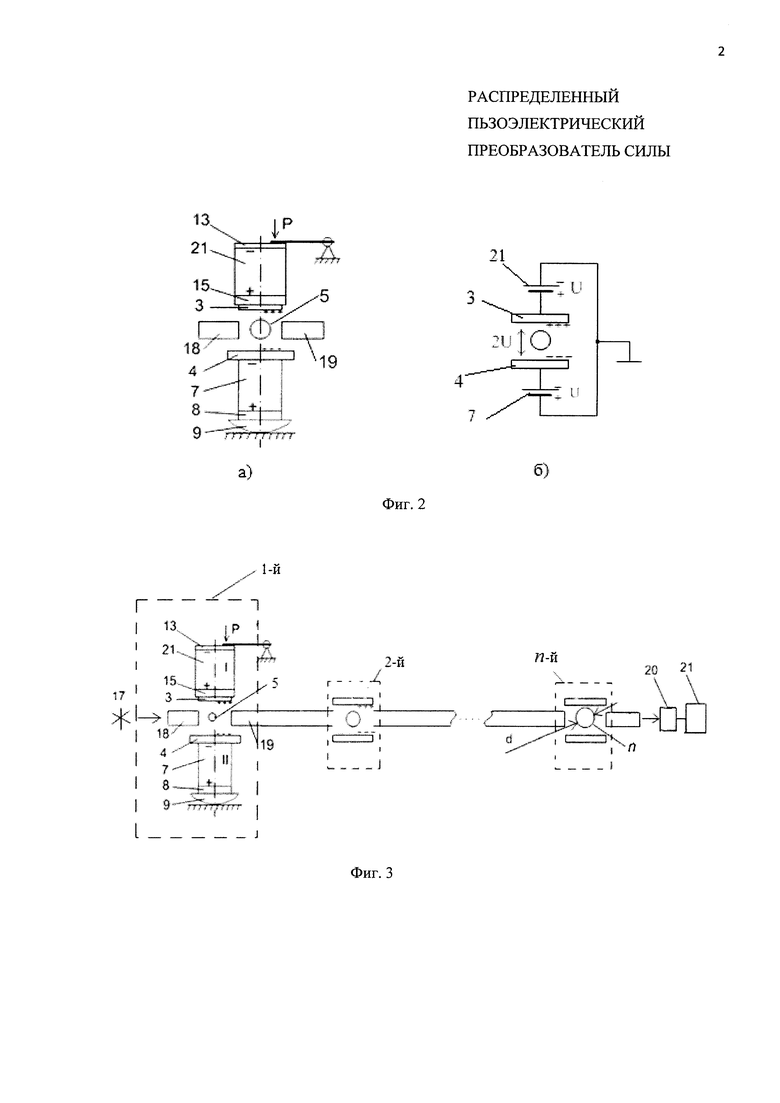
Устройство работает следующим образом. Под воздействием механического усилия P(МПа) штангой 14 относительно «земли» на рабочую часть 13 устройства, оба пьезокерамических диска будут равномерно подвергаться механическим напряжениям (первый 7 между опорной шайбой 8 и нижней обкладкой 4 конденсатора, а второй 21 между рабочей частью 13 и электродом 15). На фиг. 2 представлены эквивалентные схемы пьезоэлектрического преобразователя силы (аналог): а) - кинематическая схема; б) - электрическая схема. При расположении пьезоэлементов полюсами последовательным направлением (см. фиг. 2 а), вследствие прямого пьезоэлектрического эффекта, на обкладках обоих пьезоэлементов появятся электрические заряды, которые наводят на обкладках конденсатора электростатический потенциал (U1 - потенциал первого пьезоэлемента 7; U2 - потенциал второго пьезоэлемента 21; U1=U2=U). Поскольку электрическое соединение пьезоэлементов и конденсатора является последовательным (см. фиг. 2 б), то на обкладках конденсатора устройства напряжение будет равно как UC=U1+U2=2U. Под воздействием электростатического поля в межэлектродном пространстве частица 5 будет совершать колебательное движение, периодически касаясь обкладок конденсатора до выравнивания потенциала на электродах до порогового значения срабатывания устройства. В момент прохождения частицы через траекторию распространения светового пучка часть света будет отражаться от зеркальной поверхности частицы. При этом происходит кратковременное изменение светового потока, поступающего во второй выходной световод 19. Таким образом, излучение, идущее от источника света 17 по световоду к фоторегистратору 20, будет периодически изменяться при движении частицы, что несет информацию о ее колебательном движении и, следовательно, информацию об изменении деформации, что повышает функциональные возможности устройства, повышает пожаровзрывобезопасность и помехоустойчивость (за счет замены электоропроводников на световоды).
Поскольку частота колебания частицы fЧ прямо пропорциональна наведенному от пьезоэлементов электростатическому потенциалу U на обкладках конденсатора согласно [7], то величина деформации будет пропорциональна модуляции светового потока, который светоприемником преобразуется в электрический сигнал известными способами.

где U - напряжение между обкладками конденсатора; d - расстояние между обкладками конденсатора; ε0 - диэлектрическая постоянная; ε - относительная диэлектрическая проницаемость жидкого диэлектрика между обкладками конденсатора; γс - плотность проводящей сферической частицы; r - радиус частицы.
Недостатком данной конструкции прототипа при измерении параметров давления в 2-х и более точках является использование для каждого устройства 2-х измерительных линий, т.е. при измерении параметров давления в n точках, суммарное количество измерительных линий N составит N=2⋅n. Такое количество линий (световодов) является не только затратным с экономической стороны, но и более трудоемким при монтажных работах, например, в горных выработках.
Задачей заявляемого технического решения является создание устройства, работающего на принципе последовательного преобразования механических усилий в автоколебания частицы, которое позволяет осуществлять дистанционное измерение деформации механических усилий в n точках за счет использования дискретной оптической передачи информации световодами по одной линии при значительном сокращении измерительных световодов.
Технический результат: упрощение конструкции, экономическая целесообразность и снижение трудоемкости монтажных работ.
В предлагаемом техническом решении преобразователи силы по патенту №2574868 [6] в n-м количестве содержащие каждый по два пьезоэлемента прямого действия с полюсами последовательного направления, силовводящий блок, электроды, включенные в электрическую схему, индикаторное устройство в виде прозрачного корпуса с размещенным в нем конденсатором с электропроводной частицей между его обкладками и оптические световоды для дискретной передачи информации, соединены в единый оптический канал последовательно: вывод световода предыдущего преобразователя силы с вводом последующего преобразователя, а электропроводные частицы в конденсаторах выполнены различными по размеру для каждого преобразователя.
Соединение преобразователей в единый оптический канал позволяет сократить количество световодов N до N=n+1 вместо N=2⋅n, что упрощает конструкцию устройства, снижает себестоимость устройства и трудоемкость монтажных работ, а выполнение частиц различных по размеру для каждого преобразователя позволяет осуществлять временную модуляцию оптического сигнала при прохождении частицы через сечение световода, что позволяет выделять модулированный входной сигнал искомого преобразователя временным электронным демодулятором на выходе оптической линии.
Техническое решение поясняется схемой устройства (фиг. 3), в которой схемы каждого преобразователя идентичны эквивалентной схеме прототипа (фиг. 2 а) и 2 б)), кроме электропроводной частицы. Конструктивные элементы каждого преобразователя, кроме электропроводной частицы в устройстве и прототипе также остаются без изменения.
Конструктивно заявляемое устройство (фиг. 3) содержит n-е количество преобразователи силы, содержащие каждый по два пьезоэлемента 7, 21 прямого действия с полюсами последовательного направления, силовводящий блок (опорная шайба 8, рычажное коромысло 9), электроды 4, 15, включенные в электрическую схему (электроды пьезоэлементов 7, 21 являются одновременно обкладками конденсатора), индикаторное устройство в виде прозрачного корпуса с размещенным в нем конденсатором с обкладками 4, 15 и электропроводной частицей 5, оптические световоды (для 1-го преобразователя: входной световод для приема светового потока 18, выходной для дискретной передачи светового потока 19; для последующих преобразователей: выходной световод предыдущего преобразователя будет являться входным световодом для последующего преобразователя и т.д.). Преобразователи силы 1-й, 2-й …n-й соединены в единый оптический канал последовательно: выводной световод предыдущего преобразователя силы с вводом последующего преобразователя, а электропроводные частицы в конденсаторах преобразователей выполнены различными по размеру (диаметру d) для каждого преобразователя (d1<.d2…dn).
Устройство работает следующим образом. Все преобразователи устройства от 1-го до n-го размещается в заданных местах (точках), например, при исследовании рельефа в подземных выработках шахты на заданных расстояниях L (м) друг от друга. Перед техногенным обрушением свода в выработках предварительно образуется избыточное давление в породе и в точке расположения преобразователя за счет действия силы сжатия на силовводящий блок 9 и последующего преобразования пьезоэлементами 7, 21 электрического потенциала в механическую энергию частицы в зазоре конденсатора 4, 15 устройства, - начнется колебательный процесс частицы. Модулированный по времени частицей световой сигнал от преобразователя, на который действует сила сжатия, поступит по оптической линии на детектор 20, а затем в виде электрического сигнала на временной демодулятор 21 и, после электронной обработки, на диспетчерский пульт управления для принятия оперативного решения. Для определения истинного преобразователя, который сигнализирует об опасности, и соответственно, места с которого получена информация используется принцип модуляции оптического сигнала за счет изменения размеров частиц в конденсаторах преобразователей как показано на фиг. 3.
Принцип преобразования механического движения частицы в модулированный по времени оптический сигнал поясняется рисунками, приведенными на фиг. 4 (схема фрагмента преобразователя силы) и фиг. 5 (эпюры светового сигнала распределенного преобразователя силы). Модуляция сигнала производится следующим образом. При давлении на рабочую часть устройства 13 (фиг. 3), на противоположных обкладках 4, 15 конденсатора индуцируются электростатические заряды противоположных знаков и в результате возникновения электрического поля между обкладками Е (В/м) частица 5 с исходного положения (точка а, фиг. 4) начнет движение вверх до пересечения со световой осью оптического сигнала (точка б). При дальнейшем движении частицы (точка с) световой сигнал будет перекрыт и, соответственно световой поток Ф(лм) будет равен нулю (на эпюре фиг. 5 выходного сигнала 1-го преобразователя Ф=ƒ (τ), временное значение соответствует как б→с). При дальнейшем движении частицы (точка д) сигнал Ф=ƒ (τ) будет иметь максимальное значение (с → д → с), а временное значение светового сигнала будет соответствовать значению τф1. Эпюры светового сигнала для 1-го, 2-го и n-го преобразователей при автоколебании частицы (точки а, б, с, д) приведены на фиг. 5. Таким образом, при увеличении размера частиц dЧ (мм) за счет перекрытия светового потока Ф(лм) осуществляется прямая зависимость размера частиц от времени перекрытия светового потока, т.е dЧ=ƒ(τф), что тождественно времени прохождения светового потока (от τф1 для 1-го преобразователя, что соответствует минимальному значению диаметра частицы dЧмин, до τфn, что соответствует максимальному значению диаметра частицы dЧмакс для n-го преобразователя).
За счет изменения по времени скважности импульсного светового потока фактически осуществляется временная модуляции входного сигнала, и после детектирования и электронной обработки модулированного сигнала демодулятором, определяется искомый преобразователь силы, на который оказывалась деформация.
Изготовление комплексной измерительной системы не представляет сложности. В качестве источника оптического излучения 17 используется светодиод АЛ-107 или галогеновый источник света, а в качестве светоприемника - фотоэлемент ФД-6К. Пьезоэлементы для преобразователей используются из цилиндрических элементов сегнетоэлектрика титаната бария ВаТiO3 или возможно использование готовых керамических пьезоэлементов от китайских зажигалок. Силовводящий блок также используется от зажигалок. В качестве оптоволоконного кабеля используется любой одноволоконный одномодовый кабель (SM 9/125, ОКТ-Д и др.) с диаметром оптической сердцевины 8-10 мкм. При изменении светового потока в заявляемом устройстве от Фмакс до Фмин коэффициент передачи потока Кср изменяется от 0,9 до 0, поэтому регистрацию выходного модулированного сигнала можно осуществлять запоминающим осциллографом, например, АСК-2034 (АСК-2067), имеющим разъем для подключения к ПК. Изготовление электропроводных сферических частиц любого размера из гранулированного полистирола изложено в технологической инструкции «Технологическая инструкция. Разрядник-индикатор РЭС-1. Изготовление электропроводных сферических частиц. Бийск, НПО «Алтай», 1988». Заявляемое устройство можно использовать в пожароопасных производствах и горных выработках, т.к. искробезопасность устройства обеспечивается за счет порционного переноса частицей электрической энергии между обкладками конденсатора, аналог описан в работе [7].
Простое по конструкции предлагаемое устройство найдет широкое применение в угледобывающей и нефтеперерабатывающей промышленностях, в горных выработках, а также в системах прогнозирования аварийных ситуаций промышленных и техногенных катастроф. Использование преобразования световой энергии в дискретный сигнал дает возможность наиболее достоверно и надежно передавать и обрабатывать полученную информацию.
Список литературы, используемый при составлении заявки
1. Маликов С.Ф. Введение в технику измерений. М. Государственное научно-техническое издательство машиностроительной литературы, 1959, с. 178.
2. Ультразвуковые преобразователи. Пер. с англ. под ред. Е. Кикучи, М., 1972. 424 С.
3. Лаврик В.Г., Михеев О.В., Казанцев В.Г. Диагностика и управление состоянием массива горных пород. - М.: Издательство MAC, 2006. - С300.
4. ТРУДЫ МФТИ. - 2012. - Том 4, №2. К.А. Томышев, В.А. Баган, В.А. Астапенко
5. A.M. Мамедов, В.Т. Потапов, Т.В. Потапов, Е.К. Смуреев. Одноволоконные распределенные волоконно-оптические датчики физических величин и полей. - Фотон-Экспресс, 6(46) 2005.
6. Патент РФ, №2574868, (прототип), опубл. 10.02.2016, Бюл.№4.
7. Авторское свидетельство СССР №936475, кл. Н05F 3 /00, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2014 |
|
RU2574868C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 1991 |
|
RU2025677C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ИМПУЛЬСНОГО ДАВЛЕНИЯ | 2005 |
|
RU2296966C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ОБЪЕМНОГО НАПРЯЖЕННОГО СОСТОЯНИЯ | 2022 |
|
RU2808931C1 |
| РАЗРЯДНОЕ ИНДИКАТОРНОЕ УСТРОЙСТВО | 1990 |
|
RU2024220C1 |
| БЕЗДЕМОНТАЖНЫЙ СПОСОБ ПОВЕРКИ ВИБРОАКУСТИЧЕСКИХ ПРИЕМНИКОВ | 2013 |
|
RU2538034C9 |
| УСТРОЙСТВО ДЛЯ ЗАДЕЙСТВОВАНИЯ СРЕДСТВА ПАССИВНОЙ БЕЗОПАСНОСТИ ПРИ БОКОВЫХ СТОЛКНОВЕНИЯХ АВТОМОБИЛЯ | 2004 |
|
RU2271945C2 |
| Пьезоэлектрический преобразователь | 1983 |
|
SU1118878A1 |
| Пьезочастотный датчик силы | 1989 |
|
SU1642962A3 |
| Способ и устройство контроля динамического состояния взаимодействия элементов двигателя локомотива | 2017 |
|
RU2691461C2 |


Изобретение относится к измерительной технике и может быть использовано в различных отраслях промышленности (горнодобывающей, нефтегазовой, машиностроения, химической и др.) для дистанционной индикации и регистрации механических усилий, в частности для диагностики и мониторинга напряженно-деформированного состояния массива горных пород в окрестностях капитальных, очистных и подготовительных горных выработок, целиков, а также при техносферных и природных чрезвычайных ситуациях. Заявленный распределительный пьезоэлектрический преобразователь силы содержит n-е количество пьезоэлектрических преобразователей силы, состоящих из одинаковых элементов: по два пьезоэлемента прямого действия с полюсами последовательного направления, силовводящий блок, электроды, включенные в электрическую схему, индикаторное устройство в виде прозрачного корпуса с размещенным в нем конденсатором с электропроводной частицей между его обкладками и оптические световоды для дискретной передачи информации, при этом пьезоэлектрические преобразователи силы соединены в единый оптический канал последовательно - вывод световода предыдущего преобразователя силы с вводом последующего преобразователя, а электропроводные частицы в конденсаторах выполнены различными по размеру для каждого преобразователя. Технический результат заключается в осуществлении дистанционного измерения деформации механических усилий в n точках за счет использования дискретной оптической передачи информации световодами по одной линии при значительном сокращении измерительных световодов, а также в упрощении конструкции и снижении трудоемкости монтажных работ. 5 ил.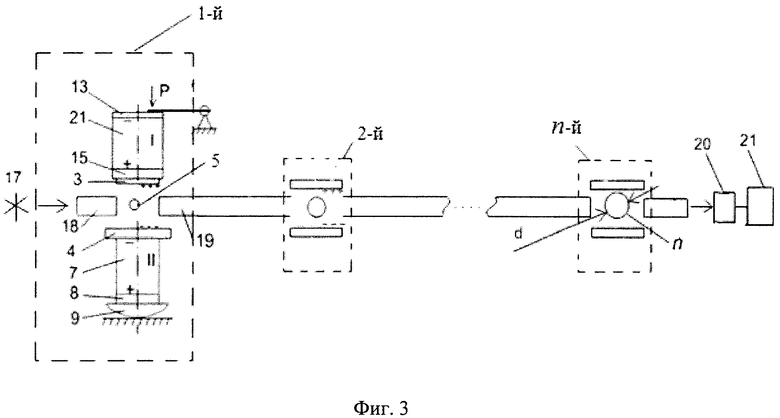
Распределительный пьезоэлектрический преобразователь силы, содержащий n-е количество пьезоэлектрических преобразователей силы, состоящих из одинаковых элементов: по два пьезоэлемента прямого действия с полюсами последовательного направления, силовводящий блок, электроды, включенные в электрическую схему, индикаторное устройство в виде прозрачного корпуса с размещенным в нем конденсатором с электропроводной частицей между его обкладками и оптические световоды для дискретной передачи информации, отличающийся тем, что пьезоэлектрические преобразователи силы соединены в единый оптический канал последовательно - вывод световода предыдущего преобразователя силы с вводом последующего преобразователя, а электропроводные частицы в конденсаторах выполнены различными по размеру для каждого преобразователя.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2014 |
|
RU2574868C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 1991 |
|
RU2025677C1 |
| Способ определения толщины граничных смазочных пленок при испытаниях материалов зубчатых передач | 1990 |
|
SU1793197A1 |
| Преобразователь постоянного электрического напряжения в импульсный сигнал | 1976 |
|
SU665270A1 |

