Изобретение относится к машиностроению и может быть использовано на гусеничных тракторах, транспортерах, а также на колесных транспортных средствах, у которых поворот осуществляется подобно гусеничным машинам затормаживанием колес на одном из бортов.
Известна система управления, содержащая рычаги, тяги и механизм поворота, например бортовой фрикцион, в которой при воздействии на орган управления водителем изменяется сила тяги на гусеницах, что вызывает поворот гусеничного транспортного средства (ГТС) - силовой поворот [1].
Недостатком указанной системы является отсутствие однозначного соответствия между перемещением органа управления и радиусом поворота ГТС. Вследствие этого управления ГТС требует от водителя большого напряжения внимания, а движение со скоростью выше 50-60 км/ч на лесных извилистых дорогах становится практически невозможным.
Невозможно также создание на базе такой системы устройства дистанционного управления ГТС.
Наиболее близкой является система управления, содержащая рулевое колесо, гидрораспределители, исполнительные гидроцилиндры, тяги и дифференциальный механизм поворота с гидрообъемной передачей или с иным бесступенчатым механизмом [2].
Недостатком указанной системы является ее сложность, большие габариты, высокая стоимость.
Целью изобретения является разработка системы управления, обеспечивающей при использовании на ГТС простого, дешевого и компактного механизма поворота (бортовой фрикцион и т.п.), однозначное соответствие между поворотом руля и радиусом поворота при низкой стоимости для повышения скорости движения, снижения психофизической нагрузки на водителя и для создания возможности дистанционного управления ГТС.
Указанная цель достигается тем, что система управления гусеничным транспортным средством содержит рулевое колесо, гидрораспределители, исполнительные гидроцилиндры, тяги и механизм поворота, а между рулевым колесом и гидрораспределителями включены вычислители и система автоматического регулирования частоты вращения выходных валов механизма поворота, состоящая из элементов сравнения, усилителей и датчиков частоты вращения выходных валов, соединенных цепью обратной связи с элементами сравнения каждый по своему борту и с вычислителем противоположного борта. Исполнительные гидроцилиндры и дублирующий привод управления соединены с рычагами механизма поворота тягами с овальными отверстиями, усилитель снабжен элементом настройки. Система дополнительно снабжена входом дистанционного управления, связанным с вычислителями.
На чертеже показана система управления ГТС.
Она включает рулевое колесо 1 с датчиком 2 угла поворота, вычислители 3, систему автоматического регулирования, включающую элементы 4 сравнения, усилители 5 с элементом настройки, гидрораспределители 6 и гидроцилиндры 7. Шток гидроцилиндра имеет наконечник с овальным отверстием 8, соединенный с рычагом 9 механизма 10 поворота. К этому же рычагу подсоединена тяга дублирующего привода 11, также имеющая овальное отверстие. На механизме поворота установлены датчик частоты вращения ведомых частей 12, связанных цепью обратной связи 13 с элементами 4, каждый по своему борту и перекрестно с вычислителями. Вычислители имеют дополнительный вход 14 дистанционного управления.
При повороте рулевого колеса напряжение с датчика 2, зависящее от угла поворота, поступает на вычислитель того борта, в сторону которого повернуто рулевое колесо (отстающий борт). На этот же вычислитель по цепи 13 поступает сигнал с датчика частоты вращения ведомых частей механизма 10 противоположного борта (забегающий борт), несущий информацию о скорости движения ГТС.
На выходе вычислителя получается сигнал, который, являясь однозначным отображением заданного поворотом руля радиуса поворота ГТС, поступает на элемент 4 устройства автоматического регулирования, как задание на частоту вращения ведомых частей отстающего борта в механизме поворота. Устройство автоматического регулирования, вдвигая или выдвигая шток гидроцилиндра 7, воздействующий на рычаг 9 механизма поворота, выдерживает частоту вращения ведомых частей механизма поворота на отстающем борту, равную заданию, чем ГТС вводится в поворот с радиусом, однозначно связанным с углом поворота рулевого колеса, а изменение условий движения отражается лишь на положении штока гидроцилиндра без изменения радиуса поворота. Поскольку в системе отражаются аналоги кинематических величин, система подобна сложному механизму поворота с гидрообъемной передачей по кинематике поворота, но значительно проще и дешевле.
Соединение штока гидроцилиндра и тяги дублирующего ручного привода 11 с рычагом механизма 9 с помощью овальных отверстий 8 делает работу системы дублирующего привода независимой, что позволяет сохранить управляемость машины при отказе системы, чем достигается высокая надежность ГТС. Усилитель 5 имеет элемент настройки, что позволяет использовать систему на различных ГТС с различными типами механизмов поворота. Дополнительный вход 14 дистанционного управления позволяет управлять ГТС на расстоянии, подавая сигнал по кабелю, по радиосвязи и т.п.
По изобретению разработана конструкторская документация, изготовлен образец и проведены испытания.
В результате применения указанной системы управления за счет однозначного соответствия угла поворота рулевого колеса и радиуса поворота управляемость ГТС приближается к управляемости колесной машины, у которой поворот осуществляется поворотом управляемых колес, повышается точность управления, сокращается ширина "коридора" при движении машины, повышается скорость движения, особенно при движении по извилистым "лесным" дорогам, снижается психофизическая нагрузка на водителя.
Система может быть использована с любым механизмом поворота с силовым управлением (бортовый фрикцион, планетарный механизм, дифференциал) и позволяет получить эффект кинематического управления с значительно меньшими затратами, чем при использовании известных систем кинематического управления.
Система может быть использована в роботизированных ГТС.
Использование: в транспортном машиностроении, а именно для гусеничных транспортных средствах (ГТС) и подобных им колесных с силовым способом поворота. Сущность изобретения: между рулевым колесом 1 и гидрораспределителями 6 включены вычислители 3 и система автоматического регулирования частоты вращения выходных валов механизма поворота, состоящая из элементов сравнения 4, усилителей 5 и датчиков частоты вращения выходных валов 12, соединенных цепью обратной связи 13 с элементами сравнения каждый по своему борту и с вычислителем противоположного борта. Исполнительные гидроцилиндры 7 и дублирующий привод 11 управления соединены с рычагами 9 механизма поворота 10 тягами с овальными отверстиями. Усилитель снабжен элементом настройки. Система дополнительно снабжена входом дистанционного управления 14, связанным с вычислителями. 3 з.п. ф-лы, 1 ил.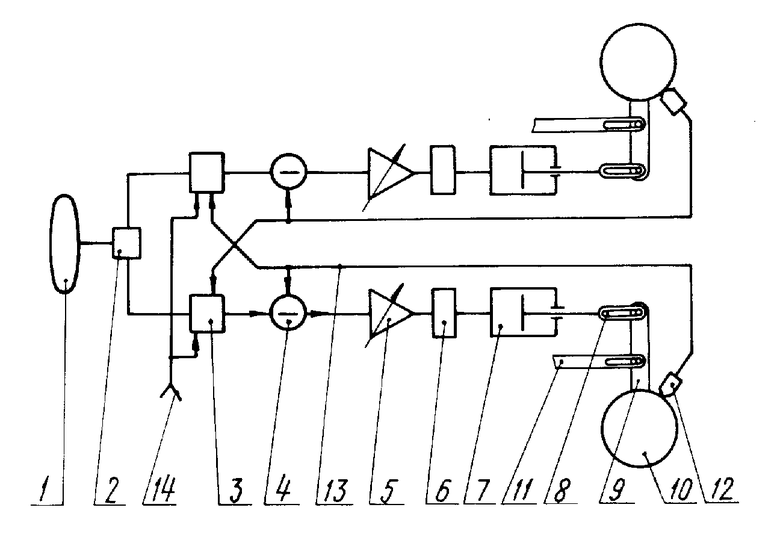
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ 1154724, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
