Изобретение относится к области машиностроения и может быть использовано для управления положением различных объектов, например, управления положением камер сгорания жидкостных ракетных двигателей (ЖРД) или рулевых поверхностей самолетов.
Известна цифровая следящая система управления - аналог, предназначенная для управления режимом работы двигателя второй ступени РН "Энергия" [1]. Это устройство содержит формирователь командного сигнала - цифровую вычислительную машину (ЦВМ), работающую в параллельном двоичном семиразрядном коде и подключенную к автономному вычислительному устройству, связанному через усилительно-преобразовательное устройство с приводным электродвигателем и дискретным датчиком обратной связи, соединенным с выходным валом редуктора, который прикреплен к объекту управления, при этом входной вал редуктора соединен с валом приводного электродвигателя.
Работа системы осуществляется путем сравнения управляющих кодов, вырабатываемых ЦВМ и кодов положения выходного вала привода, поступающих от дискретного датчика обратной связи, при этом останов вала привода происходит при совпадении этих кодов. В этой системе функции устройства сравнения и управления электродвигателем выполняет автономное вычислительное устройство (АВУ), работающее с собственным тактом квантования, независимо по отношению к формирователю командного сигнала (ЦВМ). Недостатком такой системы является ограниченная возможность работы на позиционную нагрузку, при которой в системе наблюдаются автоколебания с забросом выходного вала за уровень, определяемый дискретностью команды.
Известна также система - ближайший аналог (прототип), описанная в [2,3], которая содержит формирователь командного кода (ЦВМ), силовой гидроцилиндр, имеющий поршень со штоком, который прикреплен к объекту управления и к рычагу обратной связи, гидрораспределитель с управляющим золотником, соединенным с рычагом обратной связи, при этом полости гидрораспределителя соединены с полостями силового гидроцилиндра и с магистралями нагнетания и слива рабочей жидкости, управляющий цифровой электрогидравлический привод (УЦЭГП), имеющий несколько разрядных электрогидравлических усилителей, подключенных к формирователю командного сигнала (ЦВМ) и суммирующую цепочку разрядных поршней, выходной шток крайнего из которых соединен с рычагом обратной связи.
Работа системы осуществляется следующим образом. ЦВМ выдает команду в виде двоичного параллельного кода на обмотки нескольких разрядных электрогидравлических усилителей УЦЭГП, в результате чего раздвигаются соответствующие разрядные поршни суммирующей цепочки и шток крайнего поршня УЦЭГП смещает рычаг обратной связи, а вместе с ним и управляющий золотник гидрораспределителя. Перемещение золотника гидрораспределителя вызывает перемещение поршня силового гидроцилиндра, а вместе с ним и объекта управления, при этом происходит движение рычага обратной связи, которое перемещает управляющий золотник в сторону закрытия дроссельных окон гидрораспределителя. Когда поступление рабочей жидкости из гидрораспределителя в силовой гидроцилиндр прекращается, прекращается и движение поршня силового гидроцилиндра, а с ним и объекта управления.
Однако при работе данной системы возникают значительные прерывистые движения управляющего золотника вперед и назад относительно заданного положения, особенно при смене младших разрядов на один старший, которые передаются на поршень силового гидроцилиндра, а через него и на объект управления. Кроме этого УДЭГП имеет значительные габариты и массу, и потребляет в несколько раз больше электроэнергии, чем аналоговые приводы, что требует дополнительной массы батарей, выводимых на орбиту.
Техническим результатом настоящего изобретения является снижение затрат электроэнергии на управление приводом, и, как следствие, уменьшение массы бортового источника электропитания, массы кабельной сети, а также уменьшение массы системы в целом.
Технический результат достигается тем, что в известную цифровую электрогидравлическую следящую систему управления, содержащую формирователь командного кода, гидрораспределитель с управляющим золотником, при этом полости гидрораспределителя соединены с магистралями нагнетания и слива рабочей жидкости и с полостями силового гидроцилиндра, имеющего поршень со штоком, который прикреплен к объекту управления и к одному из концов рычага обратной связи, введен дополнительный гидроцилиндр, полости которого соединены с полостями электрогидравлического усилителя и с магистралями нагнетания и слива рабочей жидкости, при этом шток поршня дополнительного гидроцилиндра соединен с одним из концов рычага обратной связи и через редуктор связан с цифровым датчиком положения, подключенным через усилитель- преобразователь кодов к устройству суммирования, которое соединено с формирователем командного кода и с согласующим устройством, подключенным к селектору, соединенному с блоком опорных напряжений и с усилителем командного сигнала, подключенным к электрогидравлическому усилителю, при этом рычаг обратной связи с помощью тяги соединен с одним из концов дополнительного рычага, а другой конец дополнительного рычага соединен с корпусом силового гидроцилиндра, при этом дополнительный рычаг связан с управляющим золотником гидрораспределителя.
Таким образом, благодаря данному техническому решению, управление силовой частью цифровой системы осуществляется с помощью одного аналогового электрогидравлического усилителя, что обеспечивает снижение затрат электроэнергии, массы бортового источника энергии, массы кабельной сети и массы всей системы в целом.
Осуществление заявленного технического решения поясняется с помощью блок-схемы цифровой электрогидравлической системы, представленной на фиг. 1 и зависимости командного напряжения от кода разности, представленной на фиг. 2.
На блок-схеме (фиг. 1) цифрами обозначены
1- формирователь командного кода (ФКК);
2- устройство суммирования (УС);
3 - усилитель-преобразователь кода (УПК);
4 - согласующее устройство (СУ);
5 - селектор (С):
6 - блок опорных напряжений (БОН);
7 - усилитель командного сигнала (УКС);
8 - электрогидравлический усилитель (ЭГУ);
9 - дополнительный гидроцилиндр;
10 - рычаг обратной связи;
11 - тяга;
12 - дополнительный рычаг;
13 - гидрораспределитель;
14 - силовой гидроцилиндр;
15 - объект управления;
16 - редуктор (Р);
17 - цифровой датчик положения (ЦДП);
18 - магистраль нагнетания рабочей жидкости;
19 - магистраль слива рабочей жидкости.
ФКК 1 своим выходом связан с одним из входов УС 2, при этом выход СУ 2 связан с входом СУ 4, выход которого подключен к одному из входов С 5, при этом другой вход С 5 подключен к БОН 6. Выход С 5 соединен с со входом УКС 7. Выход УКС 7 соединен с входом ЭГУ 8, полости которого соединены с магистралями нагнетания 18 и слива 19 рабочей жидкости и с полостями дополнительного гидроцилиндра 9. Шток поршня дополнительного гидроцилиндра 9 соединен с рычагом обратной связи 10 и с редуктором 16. Редуктор 16 соединен с ЦДЛ 17, выход которого подключен к входу УПК 3. Выход УПК 3 соединен со вторым входом УС. Рычаг обратной связи 10 соединен со штоком поршня силового гидроцилиндра 14, при этом шток поршня силового гидроцилиндра соединен с объектом управления 15. Управляющий золотник гидрораспределителя 13 соединен с дополнительным рычагом 12, при этом полости гидрораспределителя соединены с полостями силового гидроцилиндра 14 и с магистралями нагнетания 18 и слива 19 рабочей жидкости. Один конец дополнительного рычага 12 соединен с корпусом силового гидроцилиндра 14, а другой его конец соединен с тягой 11, которая соединена с рычагом обратной связи 10.
В качестве формирователя командного кода (ФКК) может быть использован бортовой компьютер, а устройство суммирования (УС) может быть выполнено на базе известных микросхем полусумматоров или полных сумматоров [4]. Согласующее устройство (СУ) может быть выполнено на базе известных микросхем арифметико-логических элементов, при этом функции сравнения можно обеспечить за счет применения известных схем, реализующих функции равенств, строгого и нестрогого неравенств [5] . Селектор (С) может быть выполнен на базе восьмиканального мультиплексора [4], а в качестве блока опорных напряжений (БОН) можно использовать двухполярный резисторный делитель напряжений. Усилитель командного сигнала (УКС) может быть выполнен на базе известных схем усилителей постоянного тока, на основе операционных усилителей [6], а усилитель-преобразователь кодов (УПК) может быть выполнен на базе известных схем усилителя-ограничителя и преобразователя "код Грея - двоичный код" [4].
Рассмотрим работу цифровой электрогидравлической следящей системы управления положением объекта.
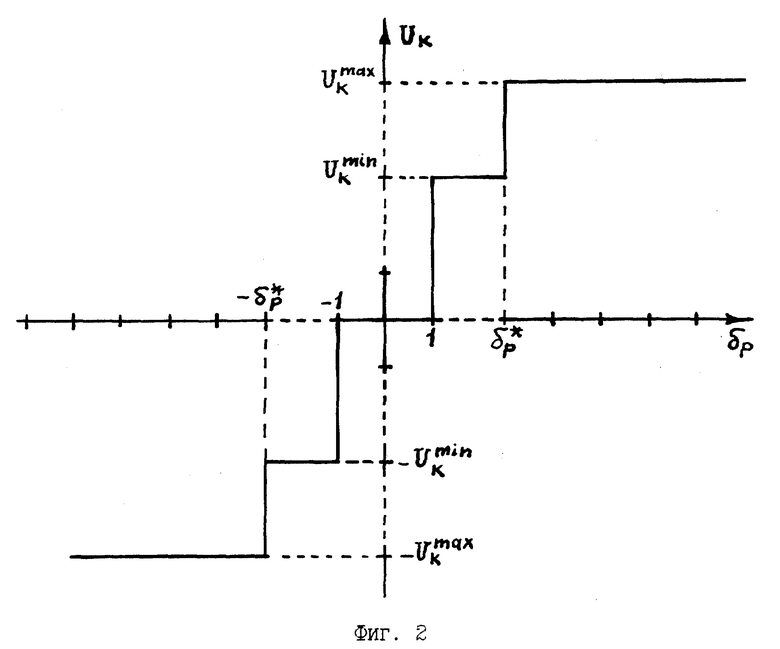
ФКК 1 выдает командный код δк в УС 2, в котором из командного кода вычитается код обратной связи δoc, вырабатываемый УПК 3. Полученный код разности δp поступает в СУ 4, которое реализует функцию сравнения и преобразует код разности в код управления δу С 5, который, в свою очередь, в зависимости от поступающего кода, выдает на выход одно из пяти значений командных напряжений, вырабатываемых БОН 6 и подаваемых на аналоговые входы С 5. Совместная работа СУ 4, С 5 и БОН 6 заключается в реализации следующего алгоритма: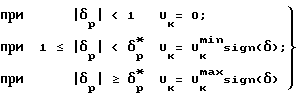
где δp - код разности; δ
Uк - напряжение командного сигнала; Umin к - напряжение командного сигнала низкого уровня; Umax k - напряжение командного сигнала высокого уровня.
Приведенный алгоритм иллюстрируется с помощью фиг. 2.
Командное напряжение поступает в УКС 7, где оно преобразуется в командный ток iк, протекающий по обмоткам электромеханического преобразователя одно- или двухкаскадного ЭГУ 8. При поступлении в ЭГУ 8 командного сигнала происходит смещение золотника гидроусилителя (Xзг), в результате чего начинается движение поршня, а вместе с ним и штока дополнительного гидроцилиндра 9 (YIII дц), которое вызывает смещение рычага обратной связи 10, тяги 11, дополнительного рычага 12, а вместе с ними и управляющего золотника гидрораспределителя 13 (Xзу), что, в свою очередь, вызывает движение поршня, а вместе с ним и штока силового гидроцилиндра 14 (YIII сц). Через редуктор 16 движение штока поршня дополнительного гидроцилиндра 9 в виде угла поворота (ϕд), передается на ЦДП 17 вырабатывающего код δд текущего положения штока поршня дополнительного гидроцилиндра 9, который после усиления и преобразования в УПК 3 (δoc) поступает в УС 2, где вычитается из командного кода δк. Движение поршня и штока дополнительного гидроцилиндра 9 прекращается, когда золотник ЭГУ 8 устанавливается в положение, перекрывающее магистрали нагнетания 18 и слива 19 рабочей жидкости в ЭГУ.
Движение штока поршня силового гидроцилиндра 14 вызывает перемещение объекта управления 15 и смещение рычага обратной связи 10 в противоположную сторону, при этом также в противоположную сторону смещаются тяга 11, дополнительный рычаг 12 и управляющий золотник гидрораспределителя 13. Движение поршня и штока силового гидроцилиндра 14, а вместе с ними и объекта управления 15, прекращается, когда управляющий золотник гидрораспределителя 13 перекрывает магистрали нагнетания 18 и слива 19 рабочей жидкости.
Особенностью работы системы является цифровое двухуровневое релейное управление положением управляющего золотника гидрораспределителя, которое осуществляется следующим образом. Если код разности δp по модулю равен или превышает второе пороговое значению δ
Выбор величины второго порогового значения δ
Таким образом, заявляемая система за счет цифрового двухуровневого релейного управления положением управляющего золотника гидрораспределителя обеспечивает точность позиционирования объектом управления в пределах плюс-минус единицы младшего разряда ЦДП, а использование в заявленной системе одного ЭГУ вместо нескольких, обеспечивает снижение затрат электроэнергии, массы бортового источника энергии, массы бортовой кабельной сети и массы всей системы в целом.
Литература
1. Белицкий Д. С., Жарков М. Н., Стоялов В. В., Шутенко В. И. Электромеханический привод в системе управления режимами жидкостных ракетных двигателей. Известия Академии наук. Теория и системы управления, 1996, N 1, с. 118-124.
2. Электрогидравлические сервомеханизмы с цифровым управлением (обзор)/Вопросы ракетной техники, N 2, 1965 г., с. 77.
3. Байда С. И. , Кудрявцев В. В, Черток Б. Е., Шутенко В. И. Цифровой электрогидравлический привод в системе управления ракеты-носителя "Энергия"/Техническая кибернетика, М 1, 1990 г, с. 186.
4. Справочник по интегральным микросхемам/ Б. В. Тарабрин, С. В. Якубовский, Н. А. Барканов и др. под ред. Б. В. Тарабрина. -2-е изд. перераб. и доп. - М. :Энергия, 1981.
5. Токхейм P. Основы цифровой электроники: Пер. с англ. -М.: Мир, 1988.
6. Алексенко А. Г. и др. Применение прецизионных аналоговых микросхем/ А. Г. Алексенко, Е. А. Коломбет, Г. И. Стародуб,-2-е изд. перераб. и доп. - М.: Радио и связь, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2008 |
|
RU2374671C1 |
| РУЛЕВАЯ МАШИНА | 1998 |
|
RU2131827C1 |
| НАСОС РЕГУЛИРУЕМОЙ ПОДАЧИ | 1994 |
|
RU2094654C1 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| СЕЙСМИЧЕСКИЙ ВИБРАТОР | 2001 |
|
RU2204846C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| АГРЕГАТ ЗАТОРМАЖИВАНИЯ | 1995 |
|
RU2094315C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЛОКАЛЬНОГО УПРАВЛЕНИЯ СЕРВОМОТОРОМ КЛАПАНА ТУРБОМАШИНЫ | 1994 |
|
RU2086778C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС РЕГУЛИРУЕМОЙ ПОДАЧИ | 1997 |
|
RU2135828C1 |
| МАЖОРИТАРНОЕ УСТРОЙСТВО | 1998 |
|
RU2141130C1 |
Изобретение относится к области машиностроения и может быть использовано для управления положением различных инерционных объектов, например, управления положением камер сгорания ракетных двигателей (ЖРД) или управления положением рулевых поверхностей самолетов. Технический результат достигается за счет использования в системе цифрового двухуровневого релейного управления положением управляющего золотника гидрораспределителя, которое обеспечивает точность позиционирования объектом управления в пределах плюс-минус единицы младшего разряда цифрового датчика положения, а использование в системе одного ЭГУ вместо нескольких обеспечивает снижение затрат электроэнергии, массы бортового источника энергии, массы бортовой кабельной сети и массы всей системы в целом. 2 ил.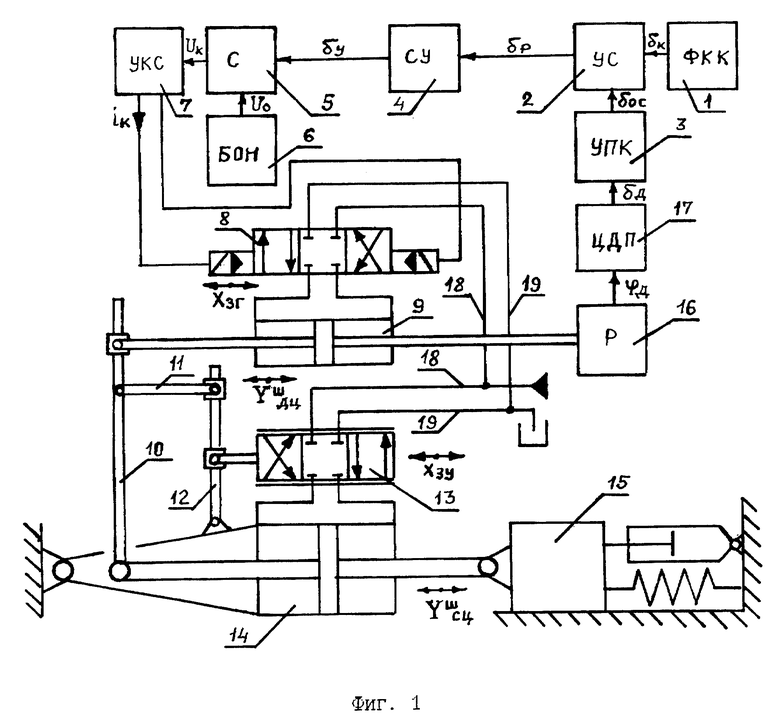
Цифровая электрогидравлическая следящая система управления положением объекта, содержащая формирователь командного кода, силовой гидроцилиндр, имеющий поршень со штоком, который прикреплен к объекту управления и к одному из концов рычага обратной связи, гидрораспределитель с управляющим золотником, при этом полости гидрораспределителя соединены с полостями силового гидроцилиндра и с магистралями нагнетания и слива рабочей жидкости, отличающаяся тем, что другой конец рычага обратной связи соединен со штоком поршня дополнительного гидроцилиндра, при этом шток поршня дополнительного гидроцилиндра через редуктор связан с цифровым датчиком положения, подключенным через усилитель-преобразователь кодов к устройству суммирования, которое соединено с формирователем командного кода и с согласующим устройством, подключенным к селектору, соединенному с блоком опорных напряжений и с усилителем командного сигнала, подключенным к электрогидравлическому усилителю, полости которого соединены с полостями дополнительного гидроцилиндра и с магистралями нагнетания и слива рабочей жидкости, при этом рычаг обратной связи с помощью тяги соединен с одним из концов дополнительного рычага, а другой конец дополнительного рычага соединен с корпусом силового гидроцилиндра, при этом дополнительный рычаг связан с управляющим золотником гидрораспределителя.
| Электрогидравлические сервомеханизмы с цифровым управлением | |||
| Обзор | |||
| - Вопросы ракетной техники, 1965, N 2, с.77 | |||
| Байда С.И., Кудрявцев В.В., Черток Б.Е., Шутенко В.И | |||
| Цифровой электрогидравлический привод в системе управления ракеты-носителя "Энергия" | |||
| - Техническая кибернетика, 1990, N 1, с.186 | |||
| US 5453926 A, 26.09.95 | |||
| US 5550953 A, 27.08.96 | |||
| Способ правки коробленных плоских колец | 1975 |
|
SU606653A1 |
