Изобретение относится к способу и уст- , ройству управления мобильным агрегатом и может быть использовано для формирования траектории движения тракторов одноосных энергетических модулей и самоходных машин.
Целью изобретения является повышение эффективности путем распределения энергии между движителями с учетом курса,. реакций почвы и режима работы при минимальном участии человека.
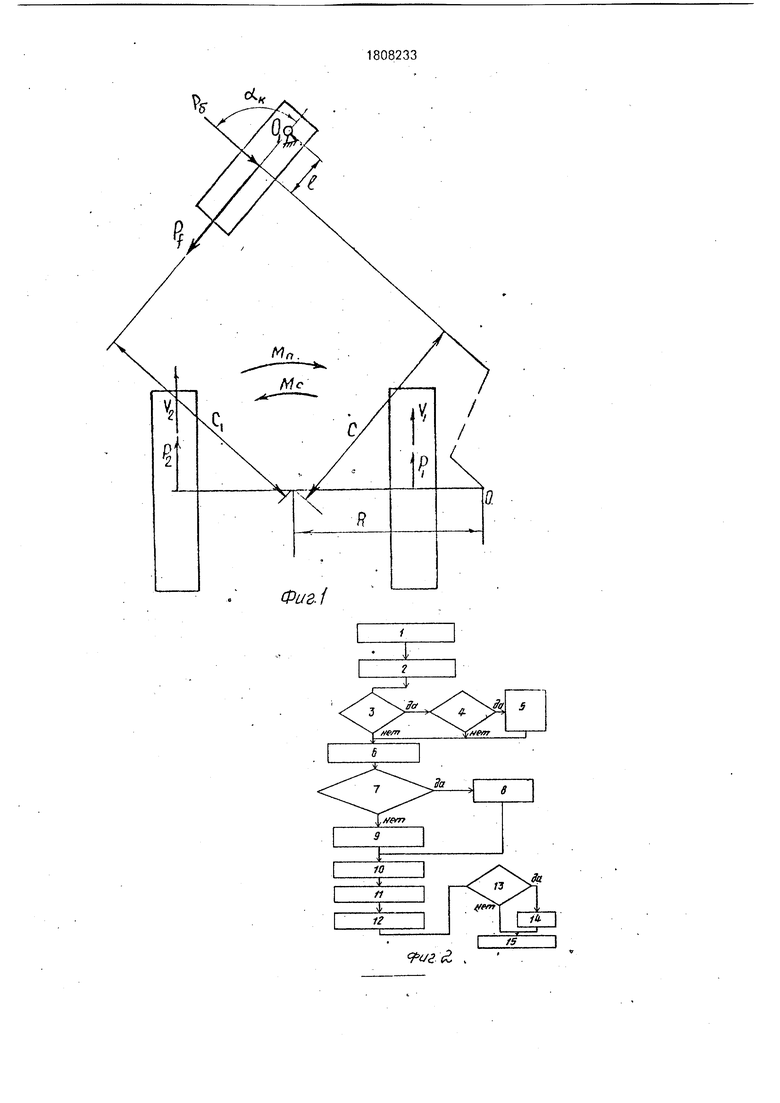
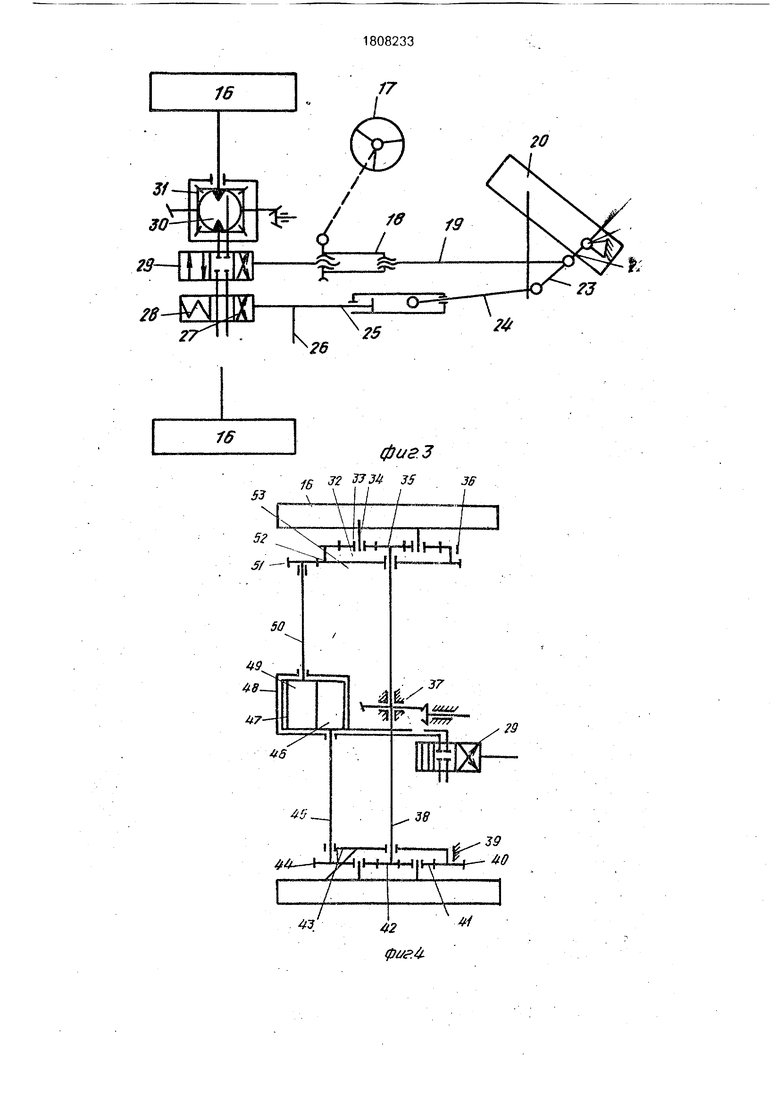
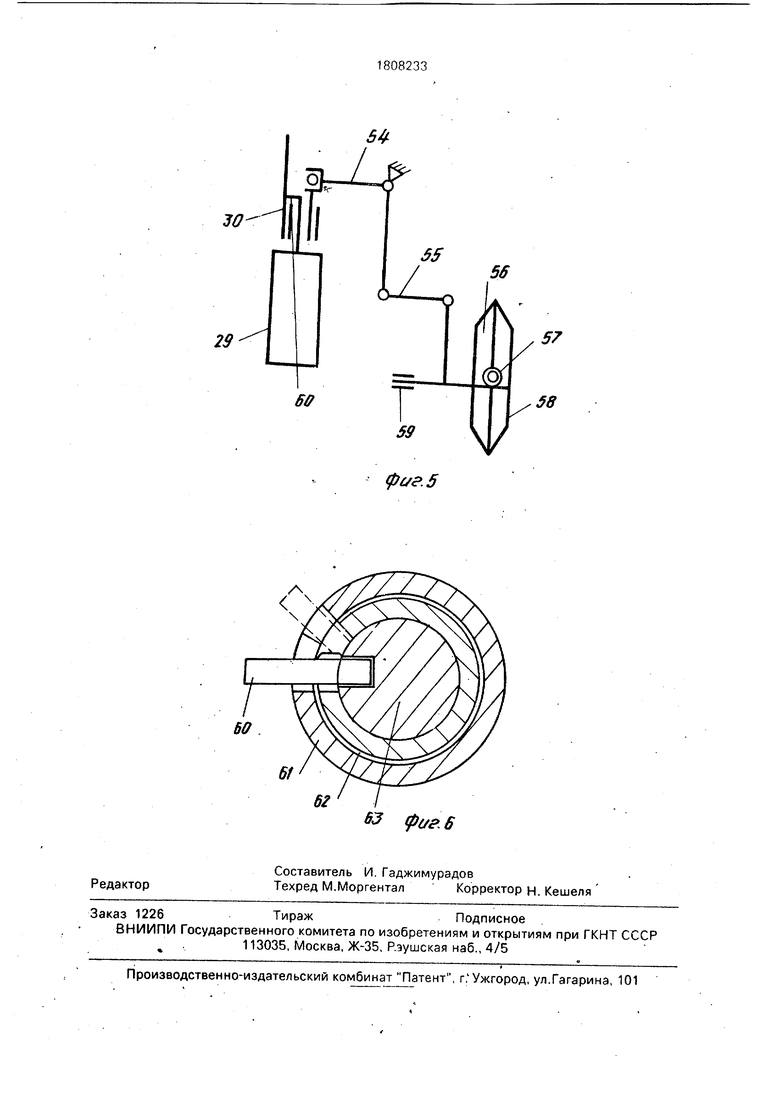
На фиг.1 изображена схема получения информации от направляющего колеса использования силового и кинематического факторов поворота вокруг центра 0; на фиг.2 - блок-схема алгоритма осуществления способа управления; на фиг.З -схема системы управления с подвижным относительно рамы рулевым механизмом и гидрораспределителем переключения рода обратной связи при реверсе и включении заднего хода; на фиг.4 - схема исполнительного модуля управления планетарными бортовыми редукторами с дополнительными входами для регулирования скоростей движителей; на фиг.5 - схема соединения гидрораспределителя сдатчиком курса и с центром фиксированного поворота; на фиг.6 - схема
одного варианта конструктивного выпоЯне- ния включателя связи датчиков и механизма управления с гидрораспределителем.
Способ управления мобильным агрегатом осуществляют использованием свойств направляющего колеса, вертикальная ось От которой смгещена на е(фиг.относительно центра площади контакта шины с почвой и линии действия боковой силы Рб при повороте на угол ( от продольной оси на стоянке и при движении для управления редукторами бортов и движителями. Поворот направляющего колеса вокруг оси От при неподвижном агрегате вызывает поворот рамы, а при движении поддерживает этот поворот, так как повернутое колесо вызывает асимметричное действие движущих сил и сил сопротивления. В ведущем режиме ведущая сила направляющего колеса помогает одному колесу задней оси, а в ведомом, как это показано ни рисунке, препятствует. Каждый раз дифференциал разблокируется дополнительной силой взаимодействия одного борта с почвой. Направляющее колесо силами сопротивления Рг качению и бокового сцепления создает облегчающие и затрудняющие поворот моменты от сил. Поворот возможен при
СО
С
00
о
00
ю
Сл
со
РбС PfCi; Рб Gi ; С Lcos сь CilC If tg«k ,
rfleGi -Сила i тяжести в контакте колеса с почвой, рь - коэффициент бокового сцепления колеса с почвой; сь - угол поворота колеса, L - база, R - радиус поворота. Силы сопротивления повороту и разблокированию дифференциала создают момент
Mn Mc CiPf; Ci-LslnOk,
Этот момент ограничивают углом поворота и радиусом поворота:
crk arctg Ci/C arctg { /f ; R Lf/рб.
Для разблокирования дифференциала необходима сила
Pc MTIB/rC,
где Мт момент от сил .трения элементов дифференциала; i - передаточное число бортового редуктора, В - ширина колеи. При осуществлении способа эту силу снижают, вместе с силой Рб используют с учетом знака касательной силы направления движения (вперед, назад) и режима работы.
Информацию о боковой силе 1 (фиг.2) почвы в ведомом режиме используют с учетом знака касательной силы 2, для чего срав- нивают 3 её с нулем, определяют 4 знак обратной связи и переключают 5 на отрицательную, после чего согласовывают 6 скорость с разностью скоростей и формируют 7 сигнал 8 о нормальной работе или для регу- лирования 9 скорости рулевым управлением. Способ включает регулирование нагрузки и скорости 10, согласование ее с кривизной траектории 11, определение коэффициента эффективности 12, формирова- ние 13 сигналов для настройки 14 или продолжения работы 15. Возможно управление без колеса-датчика.
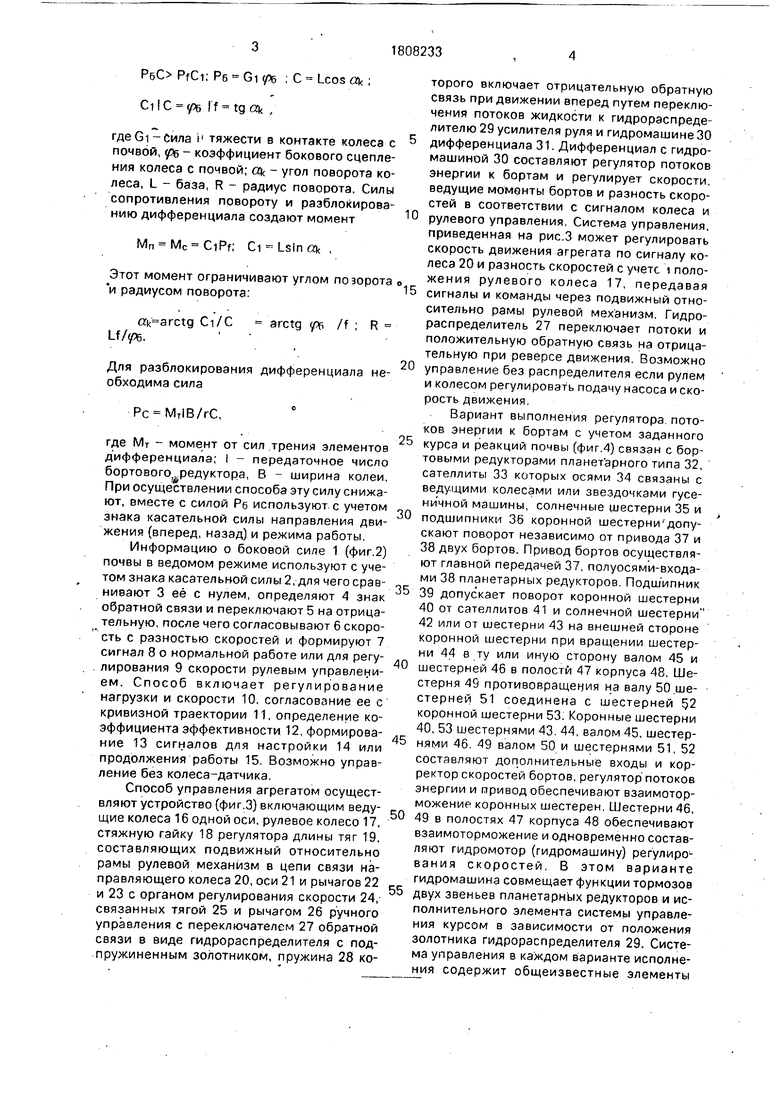
Способ управления агрегатом осуществляют устройство (фиг.З) включающим веду- щие колеса 16 одной оси, рулевое колесо 17, стяжную гайку 18 регулятора длины тяг 19. составляющих подвижный относительно рамы рулевой механизм в цепи связи направляющего колеса 20, оси 21 и рычагов 22 и 23 с органом регулирования скорости 24, связанных тягой 25 и рычагом 26 ручного управления с переключателем 27 обратной связи в виде гидрораспределителя с подпружиненным золотником, пружина 28 ко
10
15
0
5
0
,. ,., .
п
торого включает отрицательную обратную связь при движении вперед путем переключения потоков жидкости к гидрораспределителю 29 усилителя руля и гидромашине 30 дифференциала 31. Дифференциал с гидромашиной 30 составляют регулятор потоков энергии к бортам и регулирует скорости, ведущие моменты бортов и разность скоростей в соответствии с сигналом колеса и рулевого управления. Система управления, приведенная на рис.3 может регулировать скорость движения агрегата по сигналу колеса 20 и разность скоростей с учете i положения рулевого колеса 17, передавая сигналы и команды через подвижный относительно рамы рулевой механизм. Гидрораспределитель 27 переключает потоки и положительную обратную связь на отрицательную при реверсе движения. Возможно управление без распределителя если рулем и колесом регулировать подачу насоса и скорость движения.
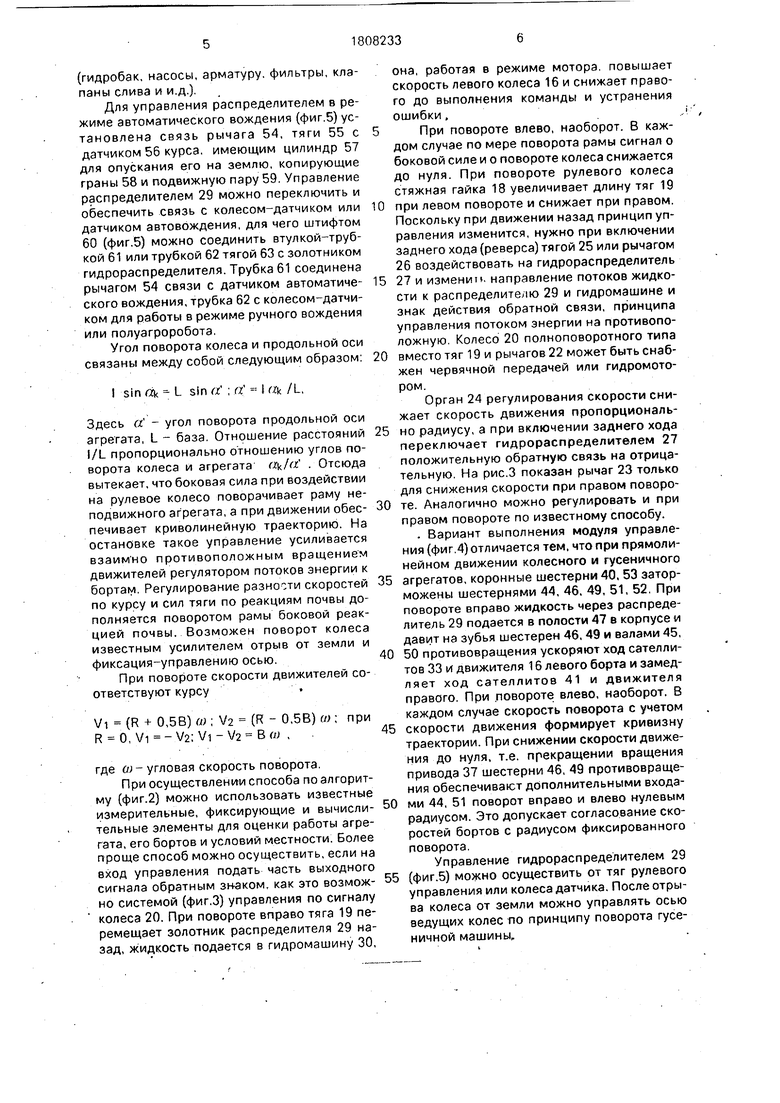
Вариант выполнения регулятора, потоков энергии к бортам с учетом заданного курса и реакций почвы (фиг.4) связан с бортовыми редукторами планетарного типа 32, сателлиты 33 которых осями 34 связаны с ведущими колесами или звездочками гусеничной машины, солнечные шестерни 35 и подшипники 36 коронной шестерни допу- скают поворот независимо от привода 37 и
38 двух бортов. Привод бортов осуществляют главной передачей 37, полуосями-входами 38 планетарных редукторов. Подшипник
39 допускает поворот коронной шестерни
40 от сателлитов 41 и солнечной шестерни 42 или от шестерни 43 на внешней стороне коронной шестерни при вращении шестерни 44 в ту или иную сторону валом 45 и шестерней 46 в полости 47 корпуса 48. Шестерня 49 противовращения на валу 50 шестерней 51 соединена с шестерней 52 коронной шестерни 53: Коронные шестерни 40, 53 шестернями 43. 44, валом 45, шестернями 46. 49 валом 50 и шестернями 51, 52 составляют дополнительные входы и корректор скоростей бортов, регулятор потоков энергии и привод обеспечивают взаимоторможение коронных шестерен. Шестерни 46, 49 в полостях 47 корпуса 48 обеспечивают взаимоторможение и одновременно составляют гидромотор (гидромашину) регулирования скоростей. В этом варианте гидромашина совмещает функции тормозов двух звеньев планетарных редукторов и исполнительного элемента системы управления курсом в зависимости от положения золотника гидрораспределителя 29. Система управления в каждом варианте исполнения содержит общеизвестные элементы
(гидробак, насосы, арматуру, фильтры, клапаны слива и и.д.).
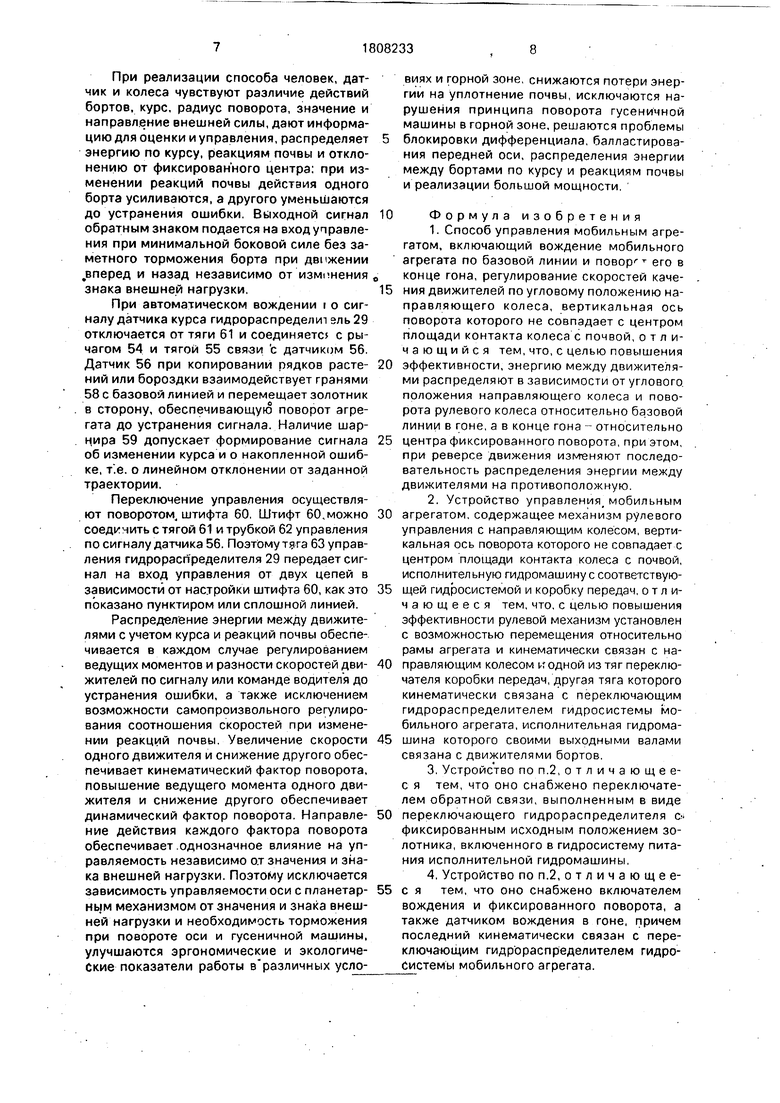
Для управления распределителем в режиме автоматического вождения (фиг.5) установлена связь рычага 54, тяги 55 с датчиком 56 курса, имеющим цилиндр 57 для опускания его на землю, копирующие граны 58 и подвижную пару 59. Управление распределителем 29 можно переключить и обеспечить связь с колесом-датчиком или датчиком автовбждения, для чего штифтом 60 (фиг.5) можно соединить втулкой-трубкой 61 или трубкой 62 тягой 63 с золотником гидрораспределителя. Трубка 61 соединена рычагом 54 связи с датчиком автоматического вождения, трубка 62 с колесом-датчиком для работы в режиме ручного вождения или полуагроробота.
Угол поворота колеса и продольной оси связаны между собой следующим образом:
I sin Ok ; L sin a ; а 1 «k /L,
Здесь « - угол поворота продольной оси агрегата, L - база. Отношение расстояний I/L пропорционально отношению углов поворота колеса и агрегата ( . Отсюда вытекает, что боковая сила при воздействии на рулевое колесо поворачивает раму неподвижного агрегата, а при движении обеспечивает криволинейную траекторию. На остановке такое управление усиливается взаим но противоположным вращением движителей регулятором потоков энергии к бортам. Регулирование разности скоростей по курсу и сил тяги по реакциям почвы дополняется поворотом рамы боковой реакцией почвы. Возможен поворот колеса известным усилителем отрыв от земли и фиксация-управлению осью.
При повороте скорости движителей соответствуют курсу
Vi (R + 0,5В) (а ; V2 (R - 0,5В) ш; при R 0, Vi -V2i Vi- V2 B w ,
где О)- угловая скорость поворота.
При осуществлении способа по алгоритму (фиг.2) можно использовать известные измерительные, фиксирующие и вычислительные элементы для оценки работы агрегата, его бортов и условий местности. Более проще способ можно осуществить, если на вход управления подать часть выходного сигнала обратным знаком, как это возможно системой (фиг.З) управления по сигналу колеса 20. При повороте вправо тяга 19 перемещает золотник распределителя 29 назад, жидкость подается в гидромашину 30,
она, работая в режиме мотора, повышает скорость левого колеса 16 и снижает правого до выполнения команды и устранения ошибки,
5При повороте влево, наоборот. В каждом случае по мере поворота рамы сигнал о боковой силе и о повороте колеса снижается до нуля. При повороте рулевого колеса стяжная гайка 18 увеличивает длину тяг 19
0 при левом повороте и снижает при правом. Поскольку при движении назад принцип управления изменится, нужно при включении заднего хода (реверса) тягой 25 или рычагом 26 воздействовать на гидрораспределитель
5 27 и изменит, направление потоков жидкости к распределителю 29 и гидромашине и знак действия обратной связи, принципа управления потоком энергии на противоположную. Колесо 20 полноповоротного типа
0 вместо тяг 19 и рычагов 22 может быть снабжен червячной передачей или гидромотором.
Орган 24 регулирования скорости снижает скорость движения пропорциональ5 но радиусу, а при включении заднего хода переключает гидрораспределителем 27 положительную обратную связь на отрицательную. На рис.З показан рычаг 23 только для снижения скорости при правом поворо0 те. Аналогично можно регулировать и при правом повороте по известному способу.
. Вариант выполнения модуля управления (фиг.4) отличается тем, что при прямолинейном движении колесного и гусеничного
5 агрегатов, коронные шестерни 40, 53 заторможены шестернями 44, 46, 49, 51, 52. При повороте вправо жидкость через распределитель 29 подается в полости 47 в корпусе и давит на зубья шестерен 46, 49 и валами 45,
0 50 противовращения ускоряют ход сателлитов 33 и движителя 16 левого борта и замед- ляет ход сателлитов 41 и движителя правого. При повороте влево, наоборот. В каждом случае скорость поворота с учетом
5 скорости движения формирует кривизну траектории. При снижении скорости движения до нуля, т.е. прекращении вращения привода 37 шестерни 46, 49 противовращения обеспечивают дополнительными входа0 ми 44, 51 поворот вправо и влево нулевым радиусом. Это допускает согласование скоростей бортов с радиусом фиксированного поворота.
Управление гидрораспределителем 29
5 (фиг.5) можно осуществить от тяг рулевого управления или колеса датчика. После отрыва колеса от земли можно управлять осью ведущих колес по принципу поворота гусеничной машины.
При реализации способа человек, датчик и колеса чувствуют различие действий бортов, курс, радиус поворота, значение и направление внешней силы, дают информацию для оценки и управления, распределяет энергию по курсу, реакциям почвы и отклонению от фиксированного центра: при изменении реакций почвы действия одного борта усиливаются, а другого уменьшаются до устранения ошибки. Выходной сигнал обратным знаком подается на вход управления при минимальной боковой силе без заметного торможения борта при движении .вперед и назад независимо от изменения знака внешней нагрузки.
При автоматическом вождении i о сигналу датчика курса гидрораспределич эль 29 отключается от тяги 61 и соединяете с рычагом 54 и тягой 55 связи с датчиком 56. Датчик 56 при копирований рядков расте- ний или бороздки взаимодействует гранями 58 с базовой линией и перемещает золотник в сторону, обеспечивающую поворот агрегата до устранения сигнала. Наличие шарнира 59 допускает формирование сигнала об изменении курса и о накопленной ошибке, т .е. о линейном отклонении от заданной траектории.
Переключение управления осуществляют поворотом, штифта 60. Штифт 60, можно соединить с тягой 61 и трубкой 62 управления по сигналу датчика 56. Поэтому тяга 63 управления гидрораспределителя 29 передает сигнал на вход управления от двух цепей в зависимости от настройки штифта 60, как это показано пунктиром или сплошной линией.
Распределение энергии между движителями с учетом курса и реакций почвы обеспечивается в каждом случае регулированием ведущих моментов и разности скоростей дви- жителей по сигналу или команде водителя до устранения ошибки, а также исключением возможности самопроизвольного регулирования соотношения скоростей при изменении реакций почвы. Увеличение скорости одного движителя и снижение другого обеспечивает кинематический фактор поворота, повышение ведущего момента одного движителя и снижение другого обеспечивает динамический фактор поворота. Направле- ние действия каждого фактора поворота обеспечивает .однозначное влияние на управляемость независимо от значения и знака внешней нагрузки. Поэтому исключается зависимость управляемости оси с планетар- механизмом от значения и знака внешней нагрузки и необходимость торможения при повороте оси и гусеничной машины, улучшаются эргономические и экологические показатели работы в различных уело-
виях и горной зоне, снижаются потери энергии на уплотнение почвы, исключаются нарушения принципа поворота гусеничной машины в горной зоне, решаются проблемы блокировки дифференциала, балластирова- ния передней оси, распределения энергии между бортами по курсу и реакциям почвы и реализации большой мощности.
Формула изобретения
1. Способ управления мобильным агрегатом, включающий вождение мобильного агрегата по базовой линии и повор|гт его в конце гона, регулирование скоростей качения движителей по угловому положению направляющего колеса, вертикальная ось поворота которого не совпадает с центром площади контакта колеса с почвой, отличающийся тем, что, с целью повышения эффективности, энергию между движителями распределяют в зависимости от углового. положения направляющего колеса и поворота рулевого колеса относительно базовой линии в гоне, а в конце гона - относительно центра фиксированного поворота, при этом, при реверсе движения изменяют последовательность распределения энергии между движителями на противоположную.
2. Устройство управления, мобильным агрегатом, содержащее механизм рулевого управления с направляющим колесом, вертикальная ось поворота которого не совпадает с центром площади контакта колеса с почвой, исполнительную гидромашину с соответствующей гидросистемой и коробку передач, отличающееся тем, что, с целью повышения эффективности рулевой механизм установлен с возможностью перемещения относительно рамы агрегата и кинематически связан с направляющим колесом к одной из тяг переключателя коробки передач, другая тяга которого кинематически связана с переключающим гидрораспределителем гидросистемы мобильного агрегата, исполнительная гидромашина которого своими выходными валами связана с движителями бортов.
3. Устройство по п.2, отличающее- с я тем, что оно снабжено переключателем обратной связи, выполненным в виде переключающего гидрораспределителя & фиксированным исходным положением золотника, включенного в гидросистему питания исполнительной гидромашины,
4. Устройство по п.2, отличающее- с я тем, что оно снабжено включателем вождения и фиксированного поворота, а также датчиком вождения в гоне, причем последний кинематически связан с переключающим парораспределителем гидросистемы мобильного агрегата.
16
фигЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| Способ управления движением агроробота | 1986 |
|
SU1551263A1 |
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
Использование: сельскохозяйственное машиностроение. Сущность изобретения: положение направляющего колеса и рычага переключателя передач управляет положением гидрораспределителей, которые связаны с гидромашиной. В зависимости от работы данной гидромашины корректируется работа бортовых движителей при повороте и в гоне. 2 с. и 2 з.п. ф-лы, 6 ил.
1Б 32 ЯМ 3536 Я
Ч
5 Я
49
48
4743
9
42
фг/гЛ
JOId
29
60
55
56
57
58
фс/е. S
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
