Изобретение предназначено для передвижения транспортных средств в условиях бездорожья, т. е. по песчаным, заснеженным, переувлажненным и т.п. грунтам, поэтому может быть использовано в качестве движителя транспортных средств в условиях пустыни, тундры, на весенне-полевых работах, в качестве внутрицехового транспортного средства и т.п.
Известны и широко используются для указанных выше целей гусеничные движители, состоящие из шарнирной цепи с башмаками опоры, которая одета на ведущее и ведомое колеса транспортного средства с маршевым двигателем на борту.
Так как передача крутящего момента от маршевого двигателя к ведущему колесу через промежуточные механизмы трансмиссии приводит к большим потерям энергии, то известные гусеничные движители обладают низкими КПД.
Кроме того, как при вращении ведущего колеса нижняя ветвь петли гусеничного движителя в условиях низкого трения проскальзывает по грунту, то это приводит к его разрушению и пробуксовыванию транспортного средства, что снижает проходимость транспортных средств и приводит к экологической опасности для грунта.
Прототипом предлагаемой транспортной магнитодинамической платформы является волновое транспортное средство (заявка N 4733212/25-11/113380).
Волновое транспортное средство-прототип содержит раму-платформу с опорными силовыми камерами из эластичного материала, заполненные рабочей средой, в которых размещены электроразрядники, соединенные с источником электропитания посредством тиристорных ключей с формирователями разрядов в виде индуктивных датчиков.
Так как рабочей средой в камерах по прототипу является жидкий или газообразный диэлектрик, то это обстоятельство требует для электропитания источник высокого напряжения на борту транспортного средства, что приводит к ухудшению массовогабаритных показателей, снижает его КПД, увеличивает нагрузку на несущий грунт и затрудняет его эксплуатацию по требованиям безопасности персонала.
Повысить КПД с одновременным снижением нагрузки на грунт и улучшением массовогабаритных показателей возможно путем снижения напряжения электропитания силовых элементов платформы. Образовать силовые элементы с низким напряжением электропитания возможно в виде магнитодинамического привода (а.с. СССР N 1424998, кл. B 23 D 31/00, 1986; а.с. СССР N 1498956, кл. F 04 B 43/12, 1986 и др.).
Цель - повышение КПД и тяги, улучшение проходимости по грунтам с низким коэффициентом трения в условиях бездорожья и предотвращение разрушающего влияния движителя на грунт.
Цель достигается тем, что на нижней поверхности опорной рамы выполнен слой силовых магнитодинамических элементов, соединенных электрически с многофазным источником электропитания и механически с эластичной оболочкой, являющейся опорой движителя на грунт.
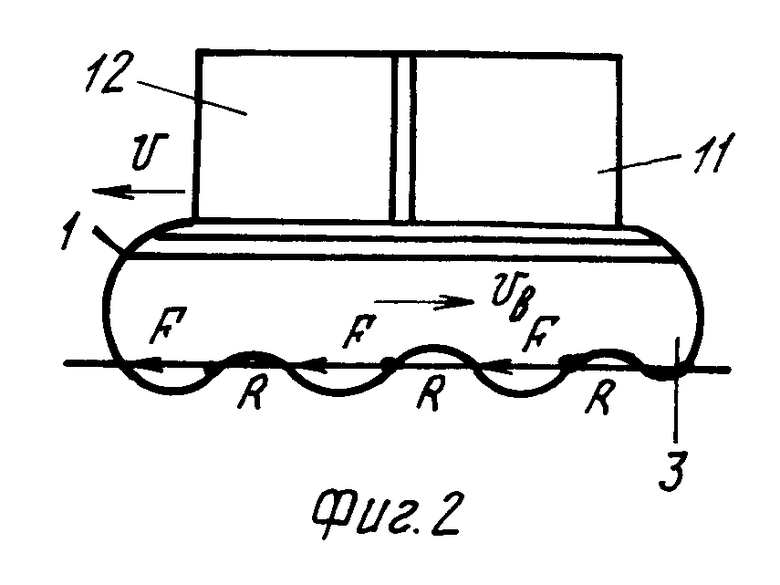
При включении многофазного источника электропитания по эластичной оболочке образуется бегущая волна деформации, реакция опоры которой по всей площади контакта с грунтом создает тягу в противоположном направлении.
Вследствие того, что площадь поверхности эластичной оболочки платформы может быть выполнена любой заданной величины без ограничения, обеспечиваются низкая нагрузка платформы на грунт, предотвращение разрушения грунта и высокая проходимость платформы по любому грунту с малым коэффициентом трения.
Так как магнитодинамический привод обеспечивает превращение электроэнергии непосредственно в механические колебания эластичной оболочкой, то предотвращаются потери энергии на промежуточные преобразования движений, чем достигается повышение КПД платформы как движителя.
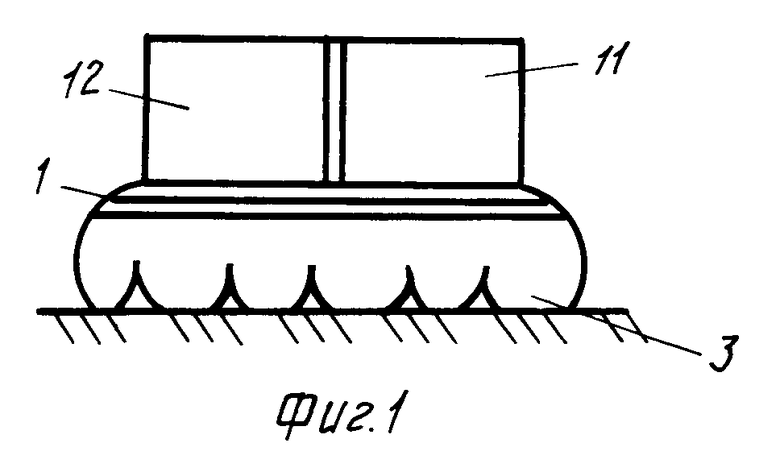
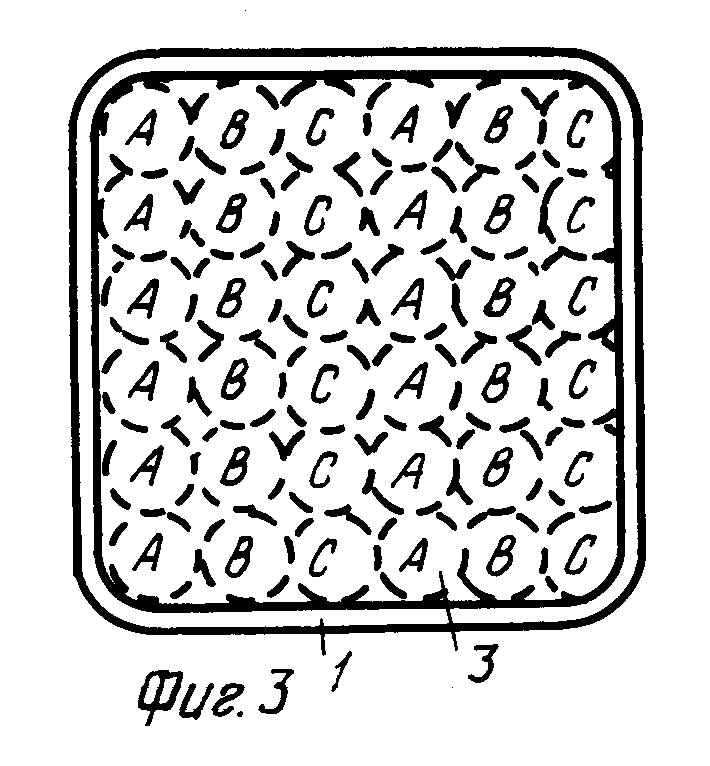
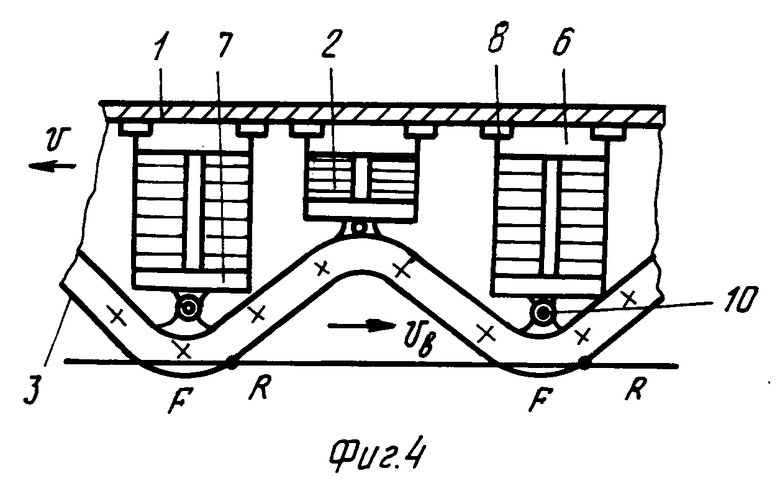
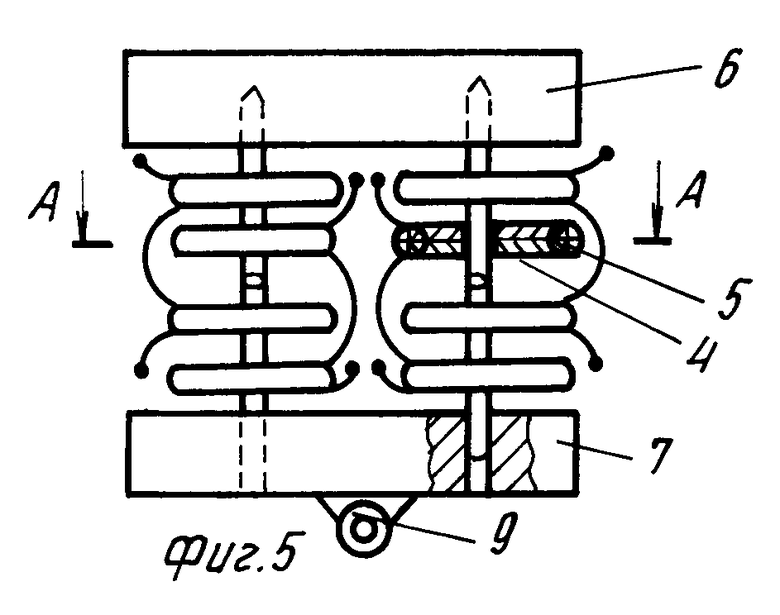
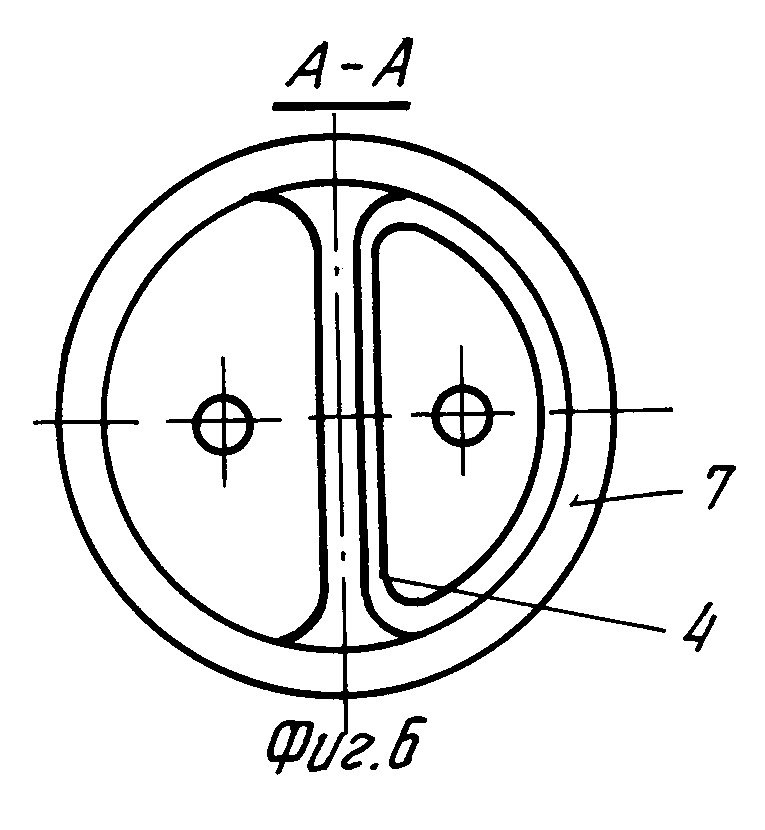
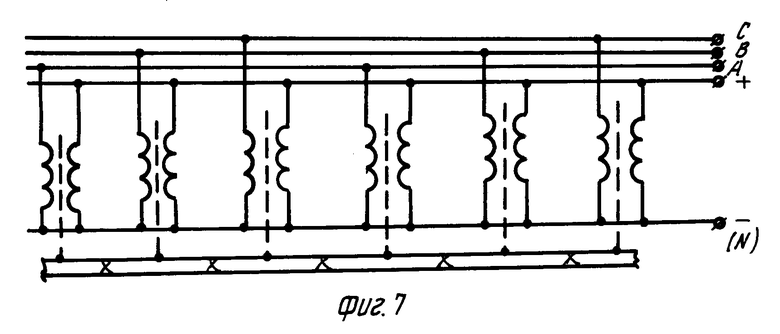
На фиг. 1 показана схема транспортной магнитодинамической платформы, вид сбоку; на фиг. 2 - схема образования тяги волнового движителя платформы; на фиг. 3 - эластичная оболочка волнового движителя платформы, вид снизу (буквами условно показаны области размещения фазных силовых элементов магнитодинамического привода); на фиг. 4 - схема работы магнитодинамических силовых элементов, связанных с эластичной оболочкой платформы; на фиг. 5 - силовой элемент магнитодинамического привода, вид сбоку; на фиг. 6 - разрез А-А на фиг. 5; на фиг. 7 - электрическая схема электропитания силовых магнитодинамических элементов платформы от сети многофазного напряжения (условно показано подключение к многофазной сети одного ряда силовых магнитодинамических элементов, подключение других рядов элементов выполнено аналогично).
Транспортная магнитодинамическая платформа состоит из рамы-платформы 1, на нижней стороне которой выполнен слой магнитодинамических силовых элементов 2, закрытый снизу и с боков эластичной оболочкой 3, которая своими бортами соединена с кромками рамы-платформы 1.
Силовые элементы 2 выполнены из двух столбиков магнитных листов 4 с периферийными обмотками 5 по периметрам листов 4, профиль которых выполнен в форме полукругов, так что два столба листов 4 вместе образуют силовой элемент круглой (цилиндрической) формы, в основаниях которого размещены неподвижный 6 и подвижный 7 якори.
Силовые элементы 2 неподвижными якорями 6 крепятся с помощью крепежных элементов 8, например приварных лап, снизу к раме-платформе 1, а подвижным якорем 7 с помощью шарнирного соединения 9 - к приливу 10 с внутренней стороны эластичной оболочки 3.
Профиль слоя силовых элементов 2, закрытый снизу эластичной оболочкой 3, может быть произвольным, например квадратным, прямоугольным, круглым или овальным в зависимости от конкретного применения платформы в заданных условиях эксплуатации.
С помощью соединительных проводов силовые элементы 2 соединены по заданной схеме с многофазным источником 11 электропитания на борту рамы-платформы 1, где также расположен маршевый двигатель 12.
Материалом рамы-платформы 1 может быть любой прочный сплав или полимер, материалом силовых элементов (листов 4 и якорей 6 и 7) является сталь электротехническая, эластичная оболочка 3 выполнена из резины, фторопласта и т.п. по конкретному условию применения.
Источник 11 электропитания является типовым блоком, включающим в себя источник многофазного напряжения для обмоток переменного тока и блок выпрямителя для электропитания обмоток постоянного тока силовых элементов 2. Коммутационная аппаратура для подключения силовых элементов 2 к соответствующим клеммам многофазного и постоянного напряжения применяется типовая по своему прямому назначению (на чертежах не показана). На фиг. 7 показана схема соединения шести силовых элементов к источнику трехфазного напряжения и к источнику постоянного напряжения. Число элементов 2 в ряду и число рядов в слое силовых элементов 2 под рамой-платформой 1 может быть произвольным, а коммутационная аппаратура подключает элементы 2 к источнику электропитания в заданной последовательности.
Работа транспортной магнитодинамической платформы осуществляется следующим образом.
В зависимости от конкретных условий применения заданное число платформ заданного профиля с помощью типовых крепежных устройств присоединяется к транспортному средству (для упрощения описания на чертежах показано транспортное средство с одной платформой). Применение в каждом конкретном случае нескольких платформ принципиально ничего не изменяет.
При включении с помощью коммутационной аппаратуры (не показана) напряжения от источника 11 электропитания силовые элементы 2 в слое под рамой-платформой 1 в эластичной оболочке 3 совершают колебательные изменения своих размеров по высоте в соответствии с фазным напряжением на обмотке переменного тока. Так как элементы 2 подключены к многофазному источнику в заданном порядке следования фаз напряжения, то по эластичной оболочке снизу создается бегущая волна деформации оболочки 3 в направлении порядка следования фаз напряжения на силовых элементах 2. Гребни волн деформации соответствуют рядам элементов 2, напряжения на обмотках которых обуславливает удлинение столбов листов 4. Поэтому переключая элементы к различным фазам источника многофазного напряжения, можно образовывать ряды фазных гребней бегущей волны в любой заданной ориентации и последовательности.
Так как снежный, песчаный или болотистый грунт в местах контакта с гребнем волны подвергается уплотнению, то в грунте при образовании бегущей волны деформации оболочки 3 образуются соответствующие ряды канавок-углублений. При образовании следующего гребня бегущей волны в направлении порядка следования фаз напряжения на силовых элементах 2 следующий ряд канавок-углублений в грунте образуется с односторонним бортом, так как второй борт канавки приходится на предыдущее углубление. Таким образом взаимодействие бегущей волны деформации оболочки 3 с грунтом носит несимметричный характер, т.е. давление оболочки 3 на грунт преимущественно одностороннее, что и приводит к образованию реакции опоры на односторонние борты канавок, т.е. к созданию тяги в направлении, обратном направлению бегущей волны.
При использовании платформы в условиях гладких и твердых полов, например, в цехах промышленных предприятий, такая тяга платформы в результате бегущей волны деформации оболочки 3 возникает вследствие передачи натяжений оболочки между соседними рядами гребней волны.
Путем изменения порядка следования фаз напряжения на элементах 2 осуществляется соответствующее изменение направления бегущей волны деформации оболочки 3, т.е. осуществляется управление направлением движения платформы в любую сторону.
Так как в работе силовых магнитодинамических элементов 2 предотвращается преобразование промежуточных движений, осуществляется непосредственное превращение электроэнергии в механическую работу на деформацию оболочки и образование бегущей волны по эластичной оболочке 3, вследствие чего повышаются КПД и тяга движителя, а повышение площади опоры платформы на грунт обеспечивает повышение проходимости движителя при предотвращении разрушающего действия движителя на грунт.
Эффективность предлагаемой транспортной магнитодинамической платформы определяется ее конкретным применением в конкретных условиях эксплуатации, числом и общей мощностью силовых элементов, площадью основания платформы, эксплуатационными характеристиками эластичной оболочки. Так, например, платформа, содержащая порядка 81 силового магнитодинамического элемента мощностью каждого около 1 кВт с общей площадью основания, закрытого резиновой оболочкой порядка 1 м2, позволяет обеспечить устойчивое передвижение платформы по песчаному грунту со скоростью до 10 м/с под нагрузкой на платформе около 10 т вместе с маршевым двигателем и блоком электропитания, не разрушая песчаный грунт при передвижении, что невозможно по прототипу или другими аналогичными транспортными средствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 1988 |
|
SU1550788A1 |
| ВОЛНОВОЙ МАГНИТОДИНАМИЧЕСКИЙ НАСОС | 1990 |
|
RU2027071C1 |
| ВОЛНОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1989 |
|
SU1669135A1 |
| Активное колесо транспортного средства | 1989 |
|
SU1736752A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СУДОВОЙ ДВИЖИТЕЛЬ | 1988 |
|
SU1552531A1 |
| МАГНИТОДИНАМИЧЕСКИЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU2027280C1 |
| МАГНИТОДИНАМИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ МЕХАНИЗМ | 1992 |
|
RU2028003C1 |
| Магнитодинамический перистальтический насос | 1987 |
|
SU1574906A1 |
| МАГНИТОДИНАМИЧЕСКОЕ СВАРОЧНОЕ УСТРОЙСТВО | 1989 |
|
RU2041779C1 |
| СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ | 1991 |
|
RU2041376C1 |
Использование: в транспортной технике. Сущность изобретения: в волновом движителе транспортного средства в качестве силовых элементов, связанных с гибкой оболочкой движителя и образующих при этом волновые колебания оболочки, используются магнитодинамические элементы. 7 ил.
ВОЛНОВОЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА, содержащий гибкую оболочку для взаимодействия с опорной поверхностью, своими краями прикрепленную к корпусу транспортного средства по его периметру и связанную своей нижней опорной частью с нижней частью корпуса транспортного средства силовыми элементами вертикального перемещения, расположенными вдоль корпуса по всей его длине в несколько рядов и подключенными к источнику питания через управляющий механизм фазового перемещения силовых элементов, коммутирующее устройство, отличающийся тем, что силовые элементы выполнены магнитодинамическими, а источник питания - многофазным электрическим.
| Прямоточная осадительная центрифуга | 1976 |
|
SU601049A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
