Магнитодинамический электродвигатель предназначен для преобразования электроэнергии трехфазного электрического тока в механическую энергию вращательного движения ротора двигателя, поэтому он может быть использован для электропривода машин и механизмов.
Известны и широко применяются для указанных целей синхронные и асинхронные электродвигатели трехфазного тока [1].
Сложность электропитания синхронных двигателей ограничивает их широкое применение на практике, а асинхронные двигатели обладают существенным недостатком, проявляющимся в их неспособности к перегрузке. Данный недостаток асинхронных двигателей предопределен известной зависимостью вращающего момента от скольжения
M =  (1) где S - скольжение ротора, т.е. относительное отставание" контура тока в обмотке ротора от вращающегося магнитного поля статора. Эта зависимость вращающего момента асинхронного двигателя от скольжения ротора имеет свой максимум при Sкр. - критическом значении скольжения, которое разделяет кривую данной зависимости на две части: левую, устойчивую зависимость до номинальных нагрузок, и правую, неустойчивую зависимость момента от скольжения при перегрузках, когда двигатель останавливается. Такой характер зависимости момента от скольжения при перегрузке объясняется взаимодействием магнитного поля контура тока в обмотке ротора с магнитным полем статора, вращающегося с постоянной скоростью, что и приводит к уменьшению вращающего момента при возрастании скольжения в закритической области.
(1) где S - скольжение ротора, т.е. относительное отставание" контура тока в обмотке ротора от вращающегося магнитного поля статора. Эта зависимость вращающего момента асинхронного двигателя от скольжения ротора имеет свой максимум при Sкр. - критическом значении скольжения, которое разделяет кривую данной зависимости на две части: левую, устойчивую зависимость до номинальных нагрузок, и правую, неустойчивую зависимость момента от скольжения при перегрузках, когда двигатель останавливается. Такой характер зависимости момента от скольжения при перегрузке объясняется взаимодействием магнитного поля контура тока в обмотке ротора с магнитным полем статора, вращающегося с постоянной скоростью, что и приводит к уменьшению вращающего момента при возрастании скольжения в закритической области.
Прототипом предлагаемого магнитодинамического электродвигателя является асинхронный двигатель с массивным короткозамкнутым ротором [2]. Он состоит из трехфазного индуктора вращающегося магнитного поля, в котором размещен цилиндрический ферромагнитный ротор с короткозамкнутой обмоткой, установленной на дно паза с частичным его заполнением, благодаря чему образованы по поверхности ротора пазы над обмоткой ротора. Благодаря данной конструктивной особенности двигателя магнитный поток, сцепляющийся со стержнем обмотки ротора, состоит из двух частей: потока, замыкающегося через воздушный зазор непосредственно над стержнем ротора и частично заходящего в паз, и потока, замыкающегося через воздушный зазор над другими зубцовыми делениями, проходящего по периферии зубцов и частично пересекающего паз. В результате достигается некоторое снижение добавочных нагрузочных потерь в стержне ротора, позволяя повысить КПД двигателя на 1-2,5%.
Так как двигатель по прототипу при перегрузках не может изменить свои конструктивные характеристики, то с возрастанием скольжения он неизбежно входит в закритическую область неустойчивой работы, т.е. как и все аналогичные асинхронные двигатели, он не способен к перегрузкам, что является его существенным недостатком.
Как известно, выражение для вращающего момента асинхронного двигателя с использованием величин цепи ротора можно записать в виде
M =  (2) где m2 - число фаз обмотки ротора, т.е. в случае короткозамкнутой обмотки типа "беличье колесо" по прототипу это число равно числу стержней обмотки ротора. Так как изменить число стержней обмотки ротора по прототипу невозможно, то его вращающий момент определяется только скольжением, как это следует из выражения (1).
(2) где m2 - число фаз обмотки ротора, т.е. в случае короткозамкнутой обмотки типа "беличье колесо" по прототипу это число равно числу стержней обмотки ротора. Так как изменить число стержней обмотки ротора по прототипу невозможно, то его вращающий момент определяется только скольжением, как это следует из выражения (1).
Повысить устойчивость работы асинхронного двигателя при перегрузках можно путем возрастания числа фаз ротора при перегрузке, что возможно выполнить конструктивно при совмещении стержней ротора с пластинами магнитопровода ротора.
С целью повышения устойчивости работы асинхронного двигателя при перегрузках ротор выполнен из двух концентрических цилиндров, набранных из листов электротехнической стали для внутреннего цилиндра перпендикулярно оси вращения, а для внешнего коаксиально.
При включении электропитания на трехфазную обмотку статора в нем образуется вращающееся магнитное поле, которое пересекает при своем вращении пластины коаксиального цилиндра ротора, являющиеся в данной своей роли стержнями обмотки ротора.
Так как при малых нагрузках скорость ротора велика, то вследствие этого индукционный ток в пластинах-стержнях обмотки ротора мал, они нагреваются слабо, а охлаждение при больших скоростях вращения интенсивное, поэтому все пластины внешнего коаксиального цилиндра плотно прилегают друг к другу, образуя практически единственную фазу обмотки ротора, что приводит к созданию малого момента вращения.
При возрастании нагрузки скорость ротора падает, вызывая возрастание индукционного тока в пластинах-стержнях обмотки ротора, что неизбежно приводит к повышению интенсивности нагревания ее и ухудшению охлаждения вследствие падения скорости. В результате теплового расширения диаметр ротора возрастает, между пластинами-стержнями образуются зазоры, нарушая электрический контакт между ними, в результате чего образуются электроизолированные друг от друга группы пластин, являющиеся одновременно фазами ротора, число которых возрастает с увеличением нагрузки, т.е. с интенсификацией нагревания ротора, что вследствие выражения (2) ведет к возрастанию момента вращения, предотвращая полную остановку ротора, т.е. обеспечивая его устойчивое вращение в периоды перегрузки. При этом происходит уменьшение воздушного зазора между ротором и статором, что, в свою очередь, уменьшает потери на рассеивание, т. е. частично компенсирует потери мощности на нагрев ротора при перегрузке, чем и обеспечивается в итоге достижение цели изобретения.
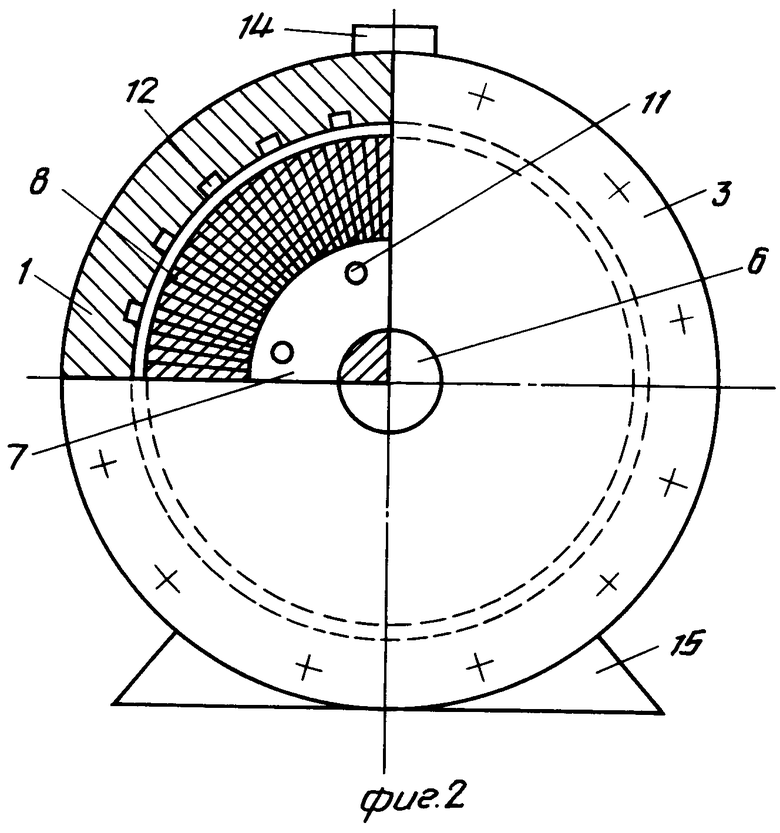
На фиг. 1 изображен магнитодинамический электродвигатель с вырезом по радиальным плоскостям, вид сбоку; на фиг. 2 - тот же электродвигатель, вид спереди. (На фигурах обмотка статора в пазах не показана).
Магнитодинамический электродвигатель содержит статор, являющийся трехфазным (многофазным) индуктором вращающегося магнитного поля, в виде цилиндра 1 с торцовыми крышками 2 и 3, в которых имеются подшипники 4 и 5, например скольжения. В подшипниках 4 и 5 на валу 6 размещен ротор из двух концентрических цилиндров. Внутренний цилиндр набран из листов-дисков 7, размещенных перпендикулярно оси вращения. Внешний цилиндр ротора набран из пластин-стержней 8 электротехнической стали, размещенных коаксиально на внутреннем цилиндре из листов 7. Пластины-стержни 8 внешнего цилиндра ротора имеет П-образную форму в плане и клиновидное сечение, а по концам выемки, которые в сборе образуют кольцевой паз 9. С помощью контактных колец 10 по форме и размерам пазов 9 и стяжных болтов через сверления 11 во внутреннем и внешнем цилиндрах ротор в сборе образует один общий ферромагнитный массивный цилиндр на валу 6. Обмотка статора в пазах 12 уложена по конкретному применению двигателя и имеет выводы через сверления 13 в статоре 1 к клеммной колодке 14 на нем. Двигатель укреплен на станине 15. Между ротором и статором на валу 6 размещены упорные шайбы 16 и 17, препятствующие аксиальным смещениям ротора.
Работает магнитодинамический электродвигатель следующим образом.
При включении трехфазного (многофазного) электрического напряжения на обмотку индуктора внутри статора 1 образуется вращающееся с частотой тока магнитное поле, которое пересекает пластины-стержни 8 обмотки ротора, вследствие чего в них возникает индуцированный ток, замкнутый на себя по контактным кольцам 10. В результате электромеханического взаимодействия статора и ротора на ротор действует пара сил, образуя вращающий момент ротора согласно уравнению (2).
На холостом ходу и при недогрузках скорость ротора по величине близка к скорости поля статора, поэтому величина индуцированного тока по пластинам-стержням 8 мала, они нагреваются слабо, а охлаждение их при высоких скоростях интенсивное, что предотвращает заметные тепловые деформации ротора. В данных условиях все пластины-стержни 8 плотно прижаты друг к другу, образуя единый стержень-фазу обмотки ротора, что приводит к малому значению величины момента вращения согласно выражению (2), уравновешенному моментом нагрузки.
При перегрузках двигателя скорость ротора падает, возрастает его скольжение, что приводит к возрастанию индуцированных токов в пластинах-стержнях 8, вызывая одновременно и нагревание более интенсивно по отношению к ухудшению условий охлаждения при низких скоростях, и возрастание электромеханических сил взаимодействия ротора со статором. Интенсивное нагревание пластин 8 ведет к увеличению общего диаметра ротора, в результате чего по поверхности ротора между пластинами 8 образуются микрощели, нарушающие электрический контакт между ними. Кроме того, значительные электромеханические силы, максимальное значение которых образуется в моменты пересечения пластин-стержней 8 магнитным потоком индуктора, вследствие инерции массивного ротора отклоняют смежные пластины-стержни на большие щели-зазоры, превращая на эти моменты пластины-стержни 8 в отдельные стержни-фазы обмотки ротора, Другими словами число фаз обмотки ротора, состоящей из П-образных магнитных пластин, является переменным в зависимости от величины тока по этим пластинам-стержням, который определяется нагрузкой двигателя, а сам определяет интенсивность нагрева и охлаждения пластин, их электромеханическое взаимодействие с индуктором.
Так как электромеханические силы принимают максимальное значение при перегрузках, то в этот период возрастает и число фаз-стержней обмотки ротора, что позволяет ему увеличить вращающий момент в соответствии с нагрузкой, чем и обеспечивается достижение цели изобретения.
Эффективность предлагаемого магнитодинамического электродвигателя определяется его габаритами, мощностью обмотки индуктора, величиной и частотой напряжения электропитания, толщиной пластин-стержней обмотки ротора. Так, например, электродвигатель с внешним диаметром статора порядка 0,25 м и его длиной порядка 0,125 м при общей мощности обмотки индуктора около 12 кВт при трехфазном напряжении величиной 220 В на фазе индуктора и частотой 50 Гц позволяет ротору диаметром 0,125 м с внешним цилиндром из порядка 400 пластин-стержней клиновидного сечения из электротехнической стали марки Э-30 или аналогичных марок развивать на валу моменты от 120 до 1200 нм при изменении скорости устойчивого вращения от 1000 до 100 об/мин, что обеспечивает надежное использование предлагаемого двигателя на транспорте и областях работы, в которых невозможно использовать двигатели по прототипу или аналогичные асинхронные двигатели.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОДИНАМИЧЕСКОЕ СВАРОЧНОЕ УСТРОЙСТВО | 1989 |
|
RU2041779C1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| МАГНИТОДИНАМИЧЕСКОЕ АКУСТИЧЕСКОЕ УСТРОЙСТВО | 1992 |
|
RU2027319C1 |
| ВОЛНОВОЙ МАГНИТОДИНАМИЧЕСКИЙ НАСОС | 1990 |
|
RU2027071C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2026797C1 |
| МАГНИТОДИНАМИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ МЕХАНИЗМ | 1992 |
|
RU2028003C1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2752234C2 |
| ПНЕВМОЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 1991 |
|
RU2027064C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА СВАРНЫХ СОЕДИНЕНИЙ ТРУБ | 1988 |
|
RU2014591C1 |
Использование: в электроприводах машин и механизмов. Сущность изобретения: электродвигатель состоит из индуктора 1 и ротора на валу, помещенного в индуктор. Ротор образован двумя цилиндрическими частями. Внутренний цилиндр набран из листов - дисков 7, размещенных перпендикулярно оси вращения, внешний цилиндр состоит из пластин 8 П-образной формы, имеющих клиновидное сечение. Пластины 8 образуют стержни обмотки ротора и расположены аксиально на внутренннем цилиндре. Стержни обмотки замкнуты с помощью торцовых контактных колец 10. Последние стянуты с пластинами стяжными болтами. 2 ил.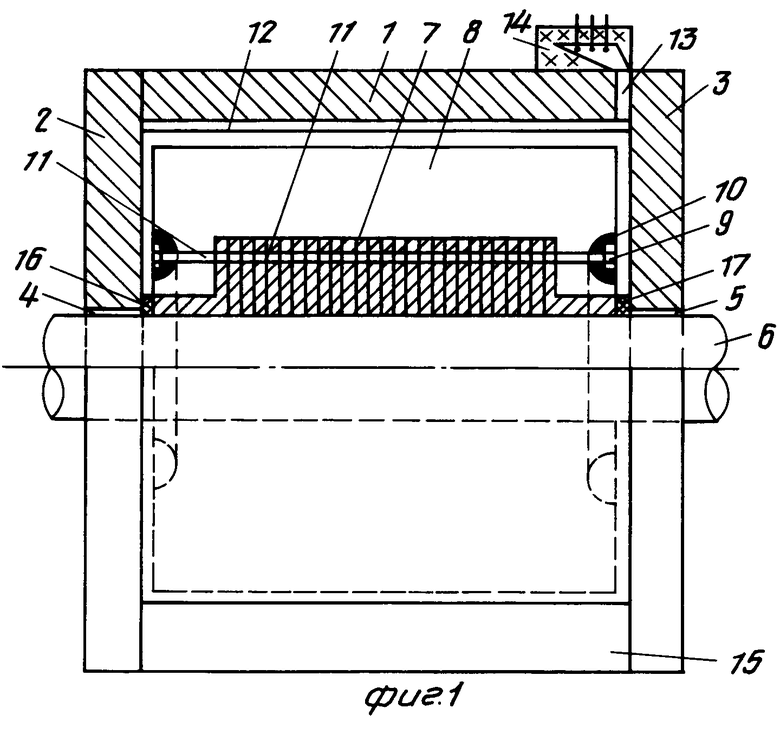
МАГНИТОДИНАМИЧЕСКИЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий электромагнитный индуктор вращающегося магнитного поля и ротор с коротнозамкнутой обмоткой внутри индуктора, отличающийся тем, что, с целью повышения устойчивости работы при перегрузках, ротор состоит из двух концентрических цилиндров, внутренний цилиндр набран из листов электротехнической стали, расположенных перпендикулярно к оси вращения, а внешний цилиндр, образующий короткозамкнутую обмотку, выполнен из П-образных пластин электротехнической стали, имеющих клиновидное сечение и расположенных аксиально на внутреннем цилиндре, при этом в основании П-образных пластин установлены контактные кольца.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Поклонов С.В | |||
| Асинхронные двигатели герметичных электронасосов | |||
| Л.: Энергоатомиздат, 1987, с.30. | |||
