Изобретение относится к электронной системе управления впрыском топлива для двигателей внутреннего сгорания, структурно состоящей из центрального электронного блока управления, центральный процессор которого воспринимает информационные сигналы от датчиков, регистрирующих такие основные рабочие параметры, как скорость вращения вала двигателя и положение дроссельной заслонки, которая регулирует поступление воздуха в двигатель, а также концентрацию отдельных компонентов в отработавшем газе, при этом указанный центральный блок управления регулирует режим впрыска горючей смеси при использовании предпочтительно одной форсунки. В частности, в зависимости от скорости вращения двигателя и положения дроссельной заслонки центральный процессор вычисляет посредством интерполяции по схеме распределения памяти опорно-расчетное время впуска топлива в двигатель (определяемое по разомкнутому вычислительному циклу), которое корректируется в зависимости от конкретных рабочих условий с учетом как параметров, регистрируемых дополнительными датчиками, измеряющими по меньшей мере, температуру охлаждающей жидкости двигателя и температуру воздуха, поступающего в него, так и информационного сигнала от датчика концентрации выхлопных газов (который определяет регулирование по замкнутому циклу времени впрыска горючей смеси).
Известны системы впpыска топлива данного типа. Они отличаются друг от друга характеристиками центрального электронного блока управления. Это касается аппаратурно-структурного решения и программного обеспечения, определяющихся конкретными условиями эксплуатации, и функционирования каждой такой топливо-инжекционной системы.
Известно также, что изменения коэффициента избыточного воздуха горючей смеси могут происходить (и в переходном, и в устойчивом режиме работы) вследствие изменений рабочих или конструктивных характеристик двигателя или системы впрыска топлива, обусловленных следующими действующими причинными обстоятельствами: изменениями плотности воздуха в результате изменений температуры относительной влажности или атмосферного давления; изменениями объемного КПД двигателя в результате изменений обратного давления в отработавшем газе, зазоров в клапанах, степени сжатия горючей смеси или характеристик механических деталей двигателя; допусками и дрейфом датчиков или исполнительных механизмов системы впрыска топлива, обусловленных изменениями емкости инжекторов, давления топлива или электрических параметров датчиков или указанных механизмов.
В конечном итоге все эти неконтролируемые изменения проявляются в ошибке в дозировании топливной смеси, так что реализуемый временной режим впрыска топлива, определенный, спланированный для номинальных условий работы двигателя, не будет соответствовать реально потребному режиму питания двигателя топливом.
Для компенсации отклонений горючей смеси от оптимального стехиометрического соотношения были разработаны принципы автоматического регулирования, базирующиеся на использовании обратной связи от датчика выхлопных (отработавших) газов. Однако в практическом аспекте реализация таких принципов оказалась чрезвычайно сложной, требующей очень высокой производительности информационной обработки в центральном блоке управления, а следовательно, исключающей возможность применения относительно простых систем впрыска топлива, например систем с форсункой с одним отверстием для впрыска топлива.
Целью изобретения является разработка электронной системы управления впрыском топлива указанного типа, которая обладала бы стратегией (принципами) автоматического регулирования и самонастройки для коррекции отклонений коэффициента избыточного воздуха достаточно простым способом и в то же время имела гарантированно высокие рабочие характеристики, сравнимые с показателями более сложных систем.
Цель достигается тем, что предложена электронная система управления впрыском топлива для двигателя внутреннего сгорания, содержащая центральный электронный блок управления, в состав которого входит центральный процессор, воспринимающий информационные сигналы по меньшей мере от средств регистрации скорости вращения вала двигателя, средств, контролирующих положение клапана, регулирующего поступление воздуха в двигатель, и средств, контролирующих состав отработавших газов; при этом указанный центральный процессор имеет первый блок для осуществления вычислений по незамкнутому циклу базового времени впрыска топливной смеси в соответствии с вышеуказанными информационными сигналами, поступающими от указанного средства регистрации скорости вращения (числа оборотов) двигателя и от средства контроля положения клапана, регулирующего количество воздуха, поступающего в двигатель, задавая таким образом режим работы последнего; второй блок для коррекции указанного базового времени впрыска в соответствии с рядом других информационных сигналов; третий блок для осуществления вычислений по замкнутому циклу первых поправочных коэффициентов по указанному базовому (нормативному, расчетному) времени впрыска также в соответствии с указанными информационными сигналами, поступающими от указанного средства контроля состава отработавшего газа; четвертый - исполнительное средство для коррекции упомянутого базового времени впрыска в соответствии с упомянутыми первыми поправочными коэффициентами; пятый - для вычисления и автоматизированной переадресации (модификации) в средствах запоминания вторых поправочных коэффициентов по базовому времени впрыска в соответствии с указанными первыми поправочными коэффициентами; шестой блок - для коррекции значений базового времени впрыска в соответствии с указанными вторыми поправочными коэффициентами, при этом число указанных вторых поправочных коэффициентов, которые подвергаются автоматическому модифицированию, меньше числа участков разбиения рабочего диапазона двигателя, осуществляемого для селекции вторых поправочных коэффициентов, причем указанные участки адресуются соответствующим средством - адресатором в соответствии с информационными сигналами, поступающими от упомянутого средства регистрации скорости вращения вала двигателя и средства контроля положения вышеуказанного клапана, регулирующего количество воздуха, поступающего в двигатель.
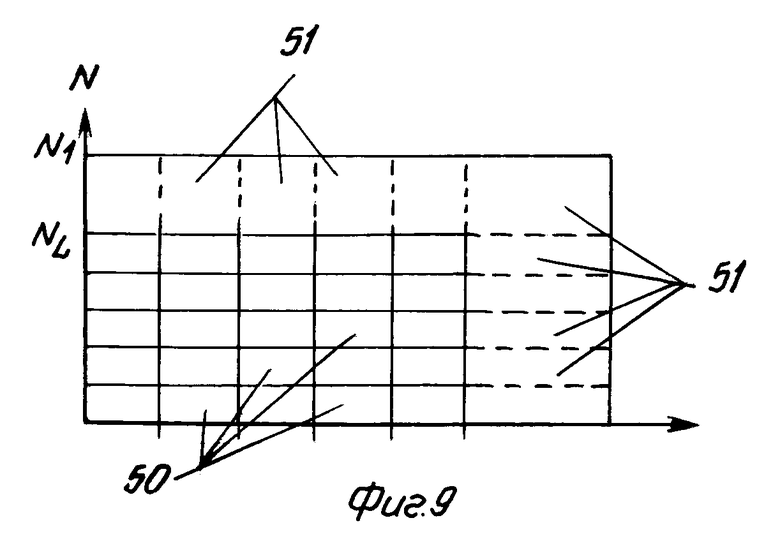
На фиг.1 приведена схема электронной системы, управляющей впрыском топлива тепловой машины; на фиг.2 приведена блок-схема центрального электронного блока управления системы, изображенной на фиг.1; на фиг.3 приведена операционная блок-схема центрального процессора электронного центрального блока управления системы, представленной на фиг.1; на фиг.4 - 6 представлены развернутые операционные схемы некоторых блоков операционной блок-структуры, изображенной на фиг. 3; на фиг. 7 приведены эпюры различных сигналов, используемых в схемах на фиг.1 и 3; на фиг.8 и 9 показаны карты размещения информации в памяти по базовому времени впрыска топлива и коэффициента адаптации, используемым в рассматриваемой системе (по оси абсцисс - положение дроссельной заслонки).
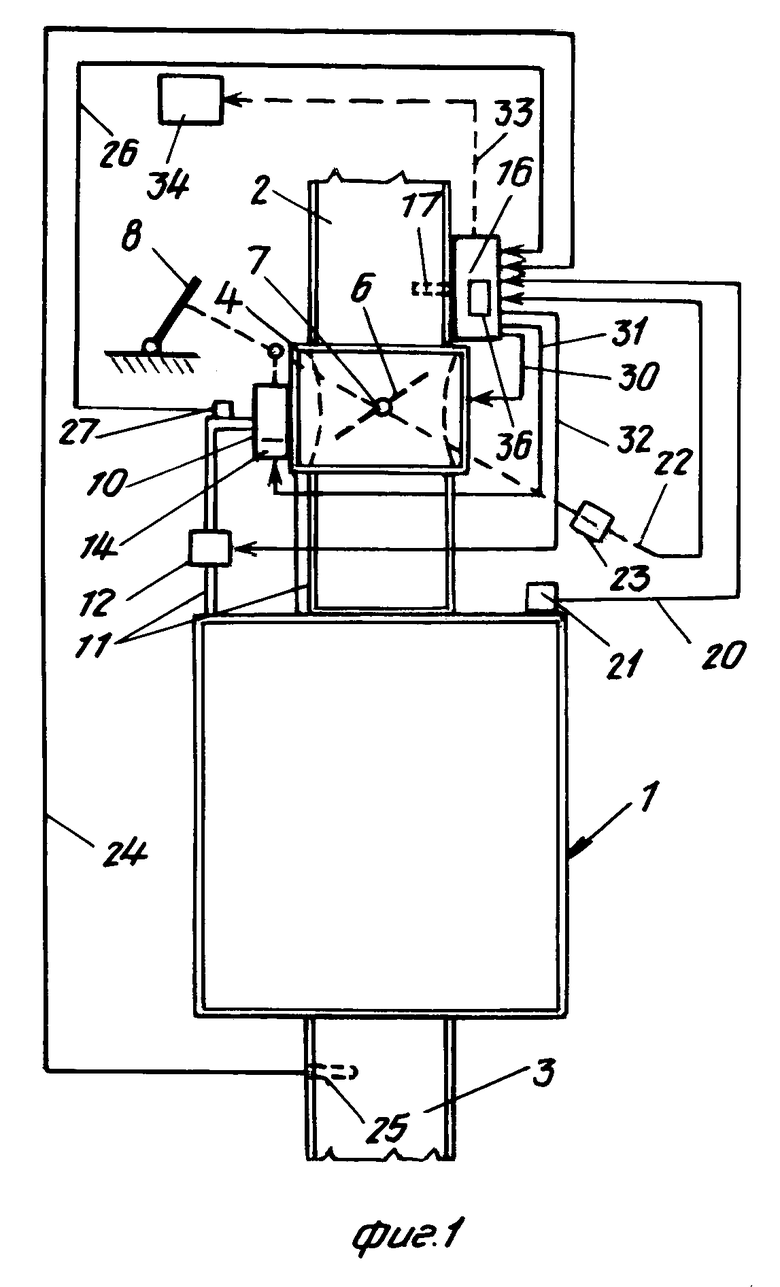
Двигатель 1 внутреннего сгорания имеет впускной канал 2 и выпускной канал 3. Во впускном канале 2 на соответствующих фланцах обычным способом смонтирована форсунка 4 с одним отверстием для впрыска топлива. В канале 2 находится главная дроссельная заслонка 6, установленная на оси 7, вокруг которой она поворачивается. Угловое положение этой заслонки задается механически педалью 8 акселератора. Положение оси 7 контролируется с помощью термочувствительного элемента 10, заполненного парафиносодержащей смесью (например, как это описано в итальянской патентной заявке N 67105 - А187). Термочувствительный элемент 10 находится в теплопередаточном контакте с рециркуляционным каналом 11, по которому проходит охлаждающая жидкость и в котором имеется соленоидный клапан 12. В прямом теплопроводящем контакте с термоэлементом 10 находится электронагревательный элемент 14, который смонтирован на форсунке 4 впрыска топлива.
Центральный электронный блок 16 управления размещен на впускном канале 2. С блоком 16 связан датчик 17 температуры всасываемого воздуха (известного типа). Датчик 17 расположен таким образом, чтобы находиться в потоке воздуха, проходящего через канал 2. Центральный блок 16 управления воспринимает первый сигнал 20 (SMOT), формируемый первичным контуром или схемой катушки 21 зажигания и использующийся для регистрации скорости вращения N двигателя 1; второй рабочий сигнал 22 (PFARF), несущий информацию о положении дроссельной заслонки 6 и поступающий от датчика 23 положения дроссельной заслонки (потенциометр), механически связанного с осью 7 заслонки 6; третий сигнал 24, формируемый датчиком 25 концентрации выхлопных газов (преобразователь концентрации), находящимся в выпускном канале 3. Датчик 25 представляет собой чувствительный элемент известного типа (λ -зонд), причем при нормальных условиях работы двигателя 1 и датчика 25 сигнал 24 изменяется в диапазоне между двумя предельными уровнями, а именно нулевыми и напряжением в 1 В, которые определяют условия приготовления топливовоздушной смеси с превышением или ниже номинального стехиометрического соотношения ( λ = = 1); четвертый сигнал 26, формируемый датчиком 27 температуры охлаждающей воды двигателя, связанным с каналом 11.
Центральный блок 16 управления формирует первый исполнительный сигнал для управления форсункой 4; второй сигнал 33, используемый для приведения в действие индикаторного устройства 34 предупреждения оптического и/или акустического типа; два сигнала 31 (Е1) и 32 (Е2) для управления соответственно электронагревательным элементом 14 и соленоидным клапаном 12.
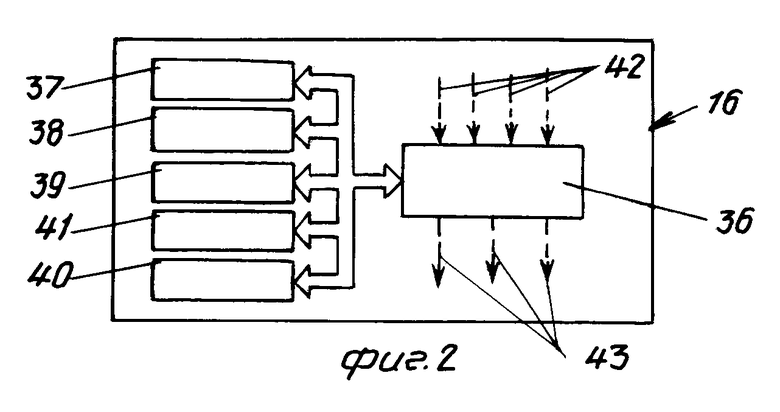
На фиг. 2 центральный блок 16 управления показан более подробно. Этот блок содержит центральный процессор (СРU) 36, на который выходят соответствующие блоки памяти, включая постоянное запоминающее устройство ROM 37, используемое для регистрации данных по расчетному времени впрыска (TI) в соответствующей картографической плоскости (PFARF - N), определяющей рабочий диапазон двигателя 1 в функции скорости вращения его вала и положения дроссельной заслонки 6; запоминающее устройство с произвольной выборкой данных RAM 38 для оперативного хранения модифицированных поправочных коэффициентов для коррекции значений расчетно-базового времени впрыска топлива; запоминающее устройство с произвольной выборкой RAM 39 для запоминания упомянутых модифицируемых коэффициентов; электрически стираемое программируемое постоянное запоминающее устройство EEPROM 40 для вспомогательной записи коэффициентов; стираемое программируемое постоянное запоминающее устройство EPROM 41 для запоминания значений различных параметров, используемых при реализации блок-процедур, приведенных на фиг.3 - 6 и подробно рассматриваемых ниже. Центральный процессор 36 связан с входами 42 и выходами 43, по которым передаются сигналы, формируемые и используемые техническими средствами, показанными на фиг.1.
Программа действий центрального процессора 36, на который поступают различные входные сигналы и с выхода которого выдаются различные команды, периодически повторяющиеся с соответствующими интервалами, составляющими порядка нескольких миллисекунд, является процедурным алгоритмом обычного типа (например, как программа, описанная в итальянской патентной заявке N 67081-А/88).
Основная программа процессора 36, используемая для вычисления текущих значений времени впрыска топлива форсункой 4, реализуется обычным образом, т. е. в виде следующих операций: вычисления базового (опорного, расчетного) времени впрыска топлива (TI) в зависимости от параметра N (скорости вращения или числа оборотов двигателя 1), определяемого по сигналу 20 SMOT, и в зависимости от параметра PFARF (положения дроссельной заслонки 6), определяемого по сигналу 22 от потенциометра 23; коррекция значений вычисленного базового времени впрыска в соответствии с реализуемой стратегией коррекции, в результате чего формируются значения модифицированного времени зажигания (TI1); введения в действие или временного блокирования алгоритмов управления форсунки 4 (блокирование впрыска) и дополнительных исполнительных технических средств (типа электронагревательного элемента 14 и термочувствительного элемента 10); введения в действие или прекращения действия алгоритмов замкнутого управления временем впрыска (при помощи сигнала 24 от датчика 25); корректирования значений времени впрыска топлива в соответствии с поправочными коэффициентами, записанными в запоминающее устройство 39 с произвольной выборкой; введения в действие и прекращения действия последовательных алгоритмов модификации значений указанных поправочных коэффициентов (KADAT) в оперативной памяти RAM 38; исполнительной реализации модифицированного времени впрыска при помощи форсунки 4.
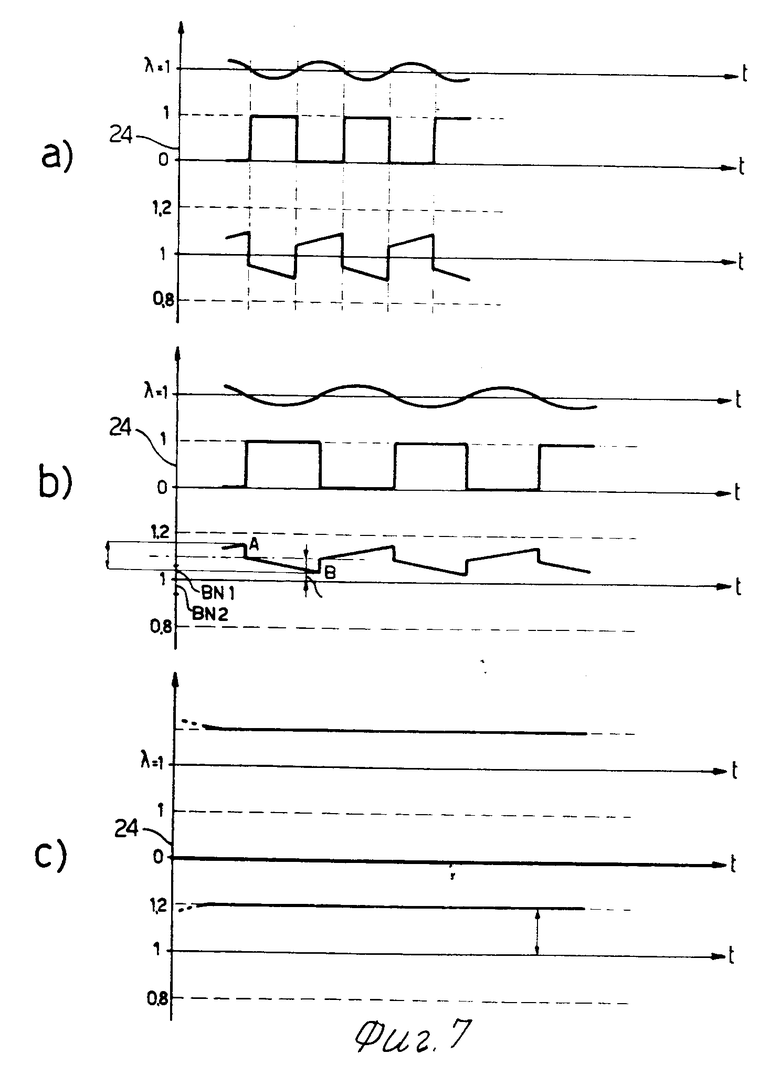
Как показано на фиг.7а-с, замкнуто-контурное управление временем зажигания заключается в пропорционально-интегральной модификации этого времени с помощью поправочного коэффициента (KLAMBDA), знак которого зависит от сигнала 24, поступающего от датчика 25. Если базовое время впрыска топлива соответствует стехиометрическому составу топливной смеси (фиг.7а), среднее значение поправки равно нулю. Фактически же при случайном изменении состава смеси вблизи стехиометрического значения ( λ = 1) будет происходить соответствующее варьирование сигнала 24 в диапазоне между значениями 0 и 1 и колебание поправочного коэффициента KLAMBDA вокруг значения 1; если же, в свою очередь, базовая смесь не является стехиометрической, поправочный коэффициент KLAMBDA автоматически изменяется на постоянную составляющую (KADTC), дающую компенсацию относительной ошибки значений базового времени впрыска, хранящихся в постоянном запоминающем устройстве ROM 37, так чтобы привести изменение состава смеси, задаваемое по замкнутому вычислительному циклу, к стехиометрическому значению ( λ = 1) с соответствующим изменением сигнала 24 в диапазоне между 0 и 1.
Центральный процессор 36 оказывает ограниченное влияние на регулирование вычисляемого по замкнутому циклу времени впрыска, которое ограничивается ± 20% от базового времени, так что сверх этого значения (фиг.7с) поправочный коэффициент автоматически ограничивается (подрезается) на постоянной составляющей (в данном случае + KLAMBDA) и, следовательно, сигнал 24 фиксируется на нулевом значении, что говорит о том, что топливная смесь остается постоянно обедненной ( λ > >1).
Коррекция времени впрыска в соответствии с поправочным коэффициентом (KADAT), значения которого хранятся в запоминающем устройстве RAM 39, автоматически постепенно модифицируется по мере изменения значений рабочих параметров двигателя 1, причем такое функциональное модифицирование осуществляется в реальном масштабе базового времени впрыска, значения которого хранятся в ПЗУ 37, на основе начального состава топливной смеси, так чтобы имело место обнуление постоянной коррекционной составляющей KADTC замкнуто-контурной системы регулирования и соответственно реализовалась возможность текущих коррекционных вмешательств в работу этой системы, начиная с центрального положения диапазона регулирования (± 20%).
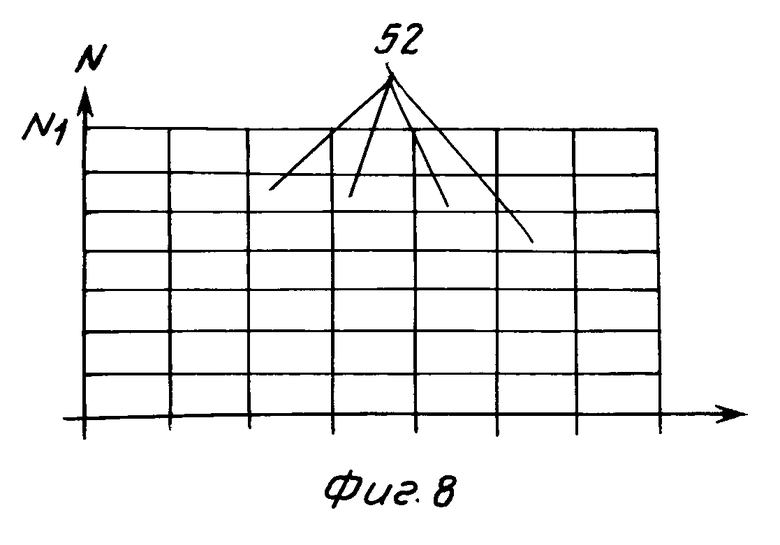
Рассматриваемые поправочные коэффициенты (KADAТ) хранятся в соответствующих ячейках памяти запоминающего устройства 39 в зонах 50 (фиг.9), определяемых конечными значениями параметра N (скорости вращения двигателя 1), формируемого на основе сигнала 20 SMOT, и параметра PFARF (положение дроссельной заслонки 6), формируемого на основе выходного сигнала 22 датчика 23 (потенциометра); принцип действия заявленной системы предполагает ограничение указанных зон 50 памяти предельными значениями NL и PFARF, т.е. по числу оборотов двигателя 1 и положению дроссельной заслонки 6, которое меньше соответствующих максимальных величин NL и PFARF, определяющих рабочий диапазон двигателя 1; за пределами зон 50 находятся зоны 51, ограниченные снизу и изнутри вышеупомянутыми предельными значениями параметра N или PFARF для зон 50, а снаружи - максимальными значениями NL и PFARFI. Как следует из фиг.8, рабочий диапазон двигателя 1 в пределах максимальных значений NL и PFARFI подразделен на совокупность зон 52, ограниченных предельными значениями параметров N и PFARF, образуя участки интерполирования значений базового времени впрыска топлива (ТI), записанных в постоянное запоминающее устройство ROM 37, причем число зон 52 превосходит число зон 50, используемых для регистрации поправочных коэффициентов KADAT в запоминающем устройстве с произвольной выборкой RAM 39.
В рабочей программе центрального процессора 36 упомянутые поправочные коэффициенты KADAT используются при всех условиях работы двигателя 1 (при запуске, после прогрева, при нормальных условиях функционирования, в переходных режимах, при осуществлении управления по разомкнутому или замкнутому контуру и т.д.) и селектируются в памяти запоминающего устройства 39 на основе зон 50 (фиг.9), адресируемых текущими значениями параметров N и PFARF, определяемых по сигналам 20 и 22; при условии, что зоны 51 адресированы, рассматриваемая система производит селективную выборку поправочных коэффициентов KADAT из смежных зон 51.
В том случае, когда система находится в состоянии, при котором поправочный коэффициент KLAMBDA ограничен (порогово) на константной составляющей KLAMBDAО, незамедлительно используется поправочный коэффициент KADAT, оперативно удерживаемый в памяти RAM 38, используемой для последовательной коррекции указанного коэффициента. Рассматриваемые поправочные коэффициенты KADAT, по существу, подвергаются последовательному модифицированию (коррекции) в оперативном запоминающем устройстве с произвольной выборкой RAM 38 и обновляются в аналогичном запоминающем устройстве RAM 39; этот процедурный процесс реализуется при определенных условиях, обеспечивая гибкую коррекцию с компенсацией ухода от стехиометрического состава топливной смеси. Эти условия реализуются при активизации замкнуто-контурного управления временем впрыска, обеспечивая стабилизацию режима работы двигателя. По истечении определенного времени задержки, за которое двигатель выходит на указанный устойчивый режим работы, на каждом цикле поступления сигнала 24 от датчика 25 (при необходимости) производится модифицирование значения поправочного коэффициента KADAT из адресной зоны с оперативной записью в соответствующую ячейку памяти RAM 38; такое модифицирование имеет селекцию по величине (амплитуде) и состоит в прибавлении или вычитании (в зависимости от знака) средней величины постоянной составляющей компенсирующего поправочного коэффициента KLAMBDA. Операция модифицирования значения поправочного коэффициента KADAT адресной зоны в соответствующей ячейке памяти RAM запоминающего устройства 39 производится только по истечении дополнительного времени задержки при функционировании двигателя в упомянутом устойчивом режиме; в свою очередь, эффективное обновление данного поправочного коэффициента KADAT в какой-то ячейке памяти RAM запоминающего устройства 39 имеет место только в соответствии с изменением зоны 50, адресируемой параметрами N и PFARF, для чего вычисляется временная задержка обновления упомянутого поправочного коэффициента.
Если система находится в состоянии, при котором поправочный коэффициент KLAMBDA органичен (порогово) на постоянной составляющей KLAMBDA О, тогда, согласно данному изобретению, вычисление по последовательной модификации значения поправочного коэффициента KADAT адресной зоны (с оперативной записью в соответствующую ячейку памяти RAM 38) осуществляется более часто, т. е. при каждом рабочем ходе поршней двигателя.
После того, как система на протяжении первого цикла реализации ее рабочего алгоритма, соответствующего нормальным условиям низкооборотной работы двигателя 1, произвела вычисление значения поправочного коэффициента KADAT для одной зоны 50, на основе этого начального значения вычисляются и записываются в запоминающее устройство RAM 39 с произвольной выборкой значения поправочных коэффициентов для других зон 50, за счет чего реализуется конечно-точечная автокалибровка.
В целях упрощения процесса обработки данных, который должен осуществляться центральным процессором 36, а также для более быстрого и корректного определения поправочных коэффициентов KADAT для различных условий работы двигателя 1 рассматриваемая заявленная система производит перенос или трансляцию содержимого (поправочных коэффициентов KADAT) из ячеек памяти запоминающего устройства 39 с произвольной выборкой RAM в соответствующие ячейки вспомогательного электрически стираемого программируемого запоминающего устройства EEPROM 40 в начале каждого цикла выполнения рабочего алгоритма системы впрыска (т.е. каждый раз при запуске двигателя 1); в свою очередь, каждый раз с началом запитки центрального блока 16 управления (к примеру, при подключении этого блока к аккумулятору автомобиля) происходит перенос содержимого ячеек вспомогательного запоминающего устройства 40 в соответствующие ячейки памяти RAM 40.
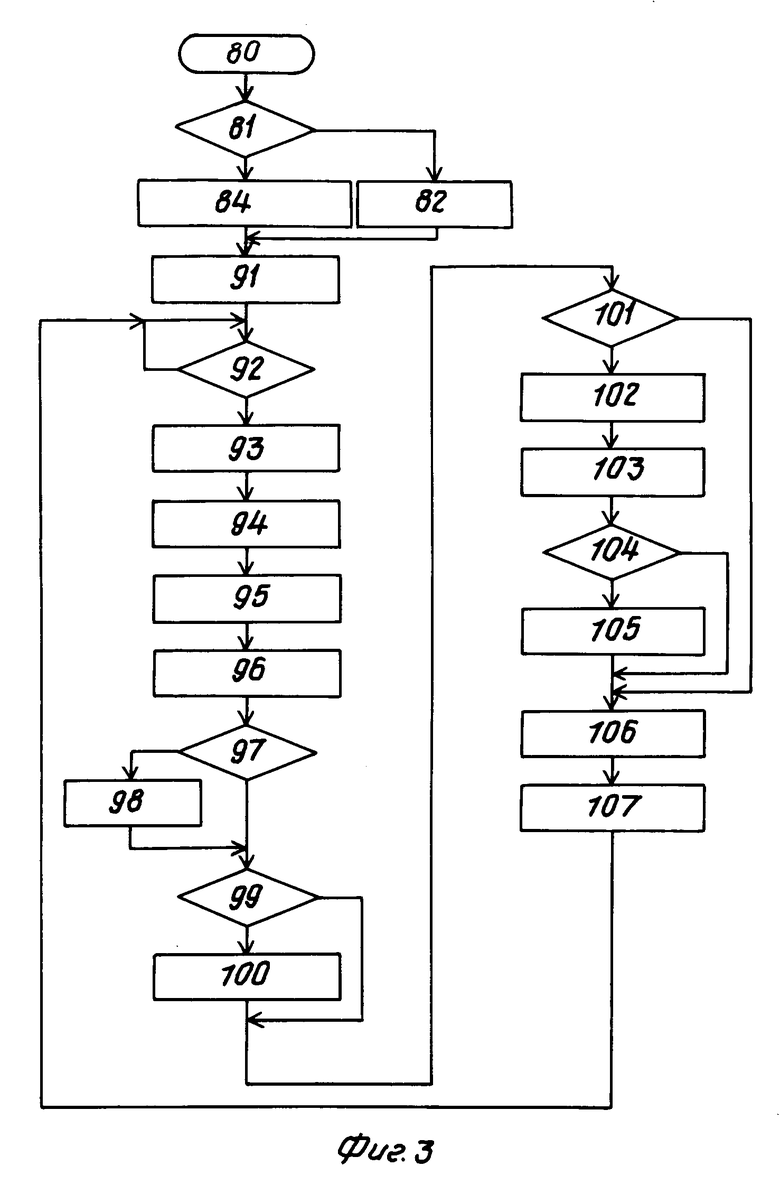
На фиг. 3 представлена основная операционная программа процессора 36, используемая для вычисления значений времени впрыска топлива форсункой 4. Входной блок 80 этой программы связан с блоком 81, который представляет собой операцию контроля (при помощи, например, измерения напряжения на конденсаторе) переключения центрального блока 16 управления после отключения аккумуляторной батареи автомобиля; в положительном случае задействуется блок-оператор 82, по команде которого осуществляется перенос в запоминающее устройство с произвольной выборкой RAM устройства 39 по различным адресным зонам 50 адаптационных коэффициентов KADAT, записанных в память EEPROM устройства 40, после чего выполнение программы переходит к блоку 91, который выдает команду на инициализацию ввода данных и параметров в различные счетчики, регистры и запоминающие структуры центрального блока 16 управления (устройство которого рассматривается подробно ниже); выполнение программы переводится на рассматриваемый блок 91 и в негативном случае, т.е. когда опрос блок-оператором 81 дает отрицательный ответ (что конкретно соответствует обычному запуску двигателя), при этом перевод происходит через блок 84, который обеспечивает командно передачу коэффициентов KADAT, хранящихся в запоминающем устройстве 39, в постоянную память EEPROM 40 по различным ее адресным зонам 50, причем такая передача осуществляется, если значения вышеуказанных коэффициентов отличаются от того, что имеется в указанном запоминающем устройстве EEPROM 40, на величину рассогласования, превосходящую опорное значение SEEPROM, хранящееся в запоминающем устройстве 41. Затем программа переходит к блоку 92, выполнение которого происходит, если на центральный процессор 36 поступает сигнал 20 (SMOT): в противном случае программа возвращается на вход блока 92, в то время, как в положительном случае (например, при каждом рабочем ходе двигателя) операционные действия переводятся на блок 93, который проводит стандартные интерполяционные вычисления по картографированной базе данных (фиг.8), хранящихся в постоянном запоминающем устройстве ROM 37, значения базового времени впрыска (TI) в зависимости от значений параметров PFPRF и N (определяющих положение дроссельной заслонки 6 и число оборотов двигателя 1), определяемых сигналами 22 и 20; определение этого значения TI производится по алгоритму разомкнуто-циклового вычисления.
От блока 93 выполнение рассматриваемой программы переходит к блоку 94, который осуществляет обычное тестирование на необходимость внесения поправок в значение базового времени впрыска топлива TI с получением скорректированного значения TI1, причем условия такой коррекции идентифицируются и реализуются по сигналам от различных датчиков по отдельности или в комбинации, определяющих такие параметры двигателя, как, например, температуру охлаждающей воды (датчик 27); температуру всасываемого воздуха (датчик 17); концентрацию выхлопных газов (датчик 25); сигнал от катушки 21 зажигания и т. д. или же конкретными рабочими условиями, такими как запуск двигателя 1, переходные режимы его работы, обусловленные значительными изменениями положения дроссельной заслонки 6.
От блок-оператора 94 выполнение рабочей программы переходит к блоку 95, который в зависимости от значений параметров RFARF и N определяет (фиг.9) потребный индексный адрес ADDRNW текущей рабочей зоны в пределах рабочего диапазона двигателя 1 среди зон 50 и 51, находящихся в допустимом рабочем диапазоне двигателя. От блока 95 программа переходит к блоку 96, который представляет собой операцию вычисления уточненного времени впрыска топлива (ТI1), корректируемого с использованием поправочного коэффициента KADAТ, отбираемого селективно из запоминающего устройства RAM 39 по индексному адресу ADDRNW, определенному при выполнении блок-оператора 95.
После операции 96 выполняется стандартная операция 97, смыслом которой является идентификация необходимости и режима ослабления нажатия (отпускания) на педаль акселератора 8 при условии, что рабочий режим двигателя 1 выходит за заданный пороговый уровень и имеются условия для реализации алгоритма останова, прекращения подачи топлива: в положительном случае программа переходит к блоку 98, который блокирует команду на задействование форсунки 4 с последующим переходом к блоку 99, который задействуется напрямую и при негативном результате вышеуказанного тестирования при выполнении операции 97.
Операционный блок 99 выполняет действия по идентификации от термодатчика 10 условий для реализации алгоритма управления двигателем 1 на малых оборотах, причем эта идентификационная операция осуществляется известным способом (например, заявка N 67105-А/87). При положительном решении операционная программа переводится к блоку 100, который вычисляет значения для формирования командно-управляющих сигналов 31 и 32, после чего реализуется блок-операция 101, на выполнение которой программа переводится напрямую в случае отрицательного решения по операционному циклу 99.
Операционный блок 101, выполняемый обычным образом, означает идентификацию режима работы двигателя, при котором в действие вводится стратегия (алгоритм) управления временем впрыска топлива в функции концентрации отработавшего газа, регистрируемой датчиком 25, с переходом к замкнуто-контурному регулированию (эта стратегия управления не применяется ни в процессе прогрева двигателя, ни при работе на максимальном энергоотборе и т.д.): в негативном случае программа переходит сразу же к операционному блоку 106, а при положительном заключении - к блоку 102, смыслом которого является проведение (известным способом) вычисления поправочных, коррекционных значений KLAMBDA по времени впрыска топлива, на основе которых при выполнении последующего операционного блока 103 определяется конечное время впрыска TIIII, при котором обеспечивается приготовление топливо-воздушной смеси со стехиометрическим составом.
От блока 103 рабочая программа переводится к выполнению блок-операции 104, смыслом которой является тестовая идентификация режима устойчивой, стационарной работы двигателя 1 с целью вычислительной корректировки и обновления упомянутых поправочных коэффициентов KADAT в соответствии с информацией, получаемой при детектировании сигналов от датчиков 23 (положение дроссельной заслонки 6), 17 (температуры всасываемого воздуха в двигатель 1) и 27 (температуры охлаждающей воды двигателя 1), а также проведение верификации, если значение параметра PFARF остается постоянным в течение определенного отрезка времени, с помощью декрементирующего (вычитающего) счетчика, начальное значение на котором задано в запоминающем устройстве EPROM 41, при условии, что температура всасываемого воздуха в двигатель 1 превосходит пороговое значение ТА, а температура охлаждающей воды больше порогового значения ТВ, причем оба эти пороговых значения ТА и ТВ записаны в стираемую программируемую память 41. В случае негативного результата выполнение рабочей программы переходит от блока 104 к операционному блоку 107,в то время как при положительном результате тестирования задействуется блок-оператор 105, в котором осуществляется вычисление в целях обновления указанных рабочих показателей KADAT.
После операции в блоке 105 процесс выполнения программы переходит к блоку 106, смыслом которого является контроль (известным способом) функционального состояния и работоспособности различных входных и выходных схем (контуров, каскадов) центрального блока управления 16 и генерирование в случае аномальности сигнала 33. От блока 106 выполнение операционной программы переходит к блоку 107, который в зависимости от конечного значения времени впрыска топлива, определенного для форсунки 4, устанавливает режим синхронизированной или асинхронной инжекции относительно фазораспределения двигателя и дополнительно подготавливает форсунку 4 к осуществлению впрыска. От блока 107 процесс управления возвращается к блоку 92.
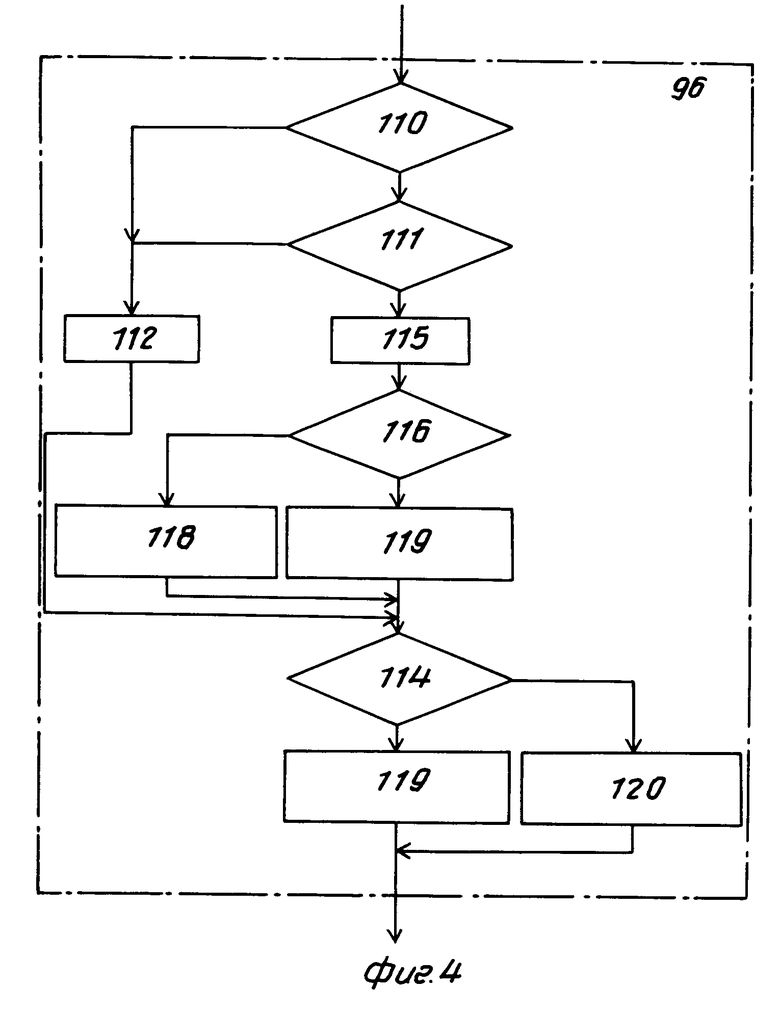
На фиг. 4 в развернутом виде показана операционная структура блока 96, предназначенного для вычисления времени (TI1) впрыска топлива, скорректированного с помощью поправочного коэффициента KADAT, селективно выбираемого и записываемого в запоминающее устройство RAM 39 с произвольной выборкой по адресу ADDRNW, определяемому при выполнении блок-оператора 95. Подпрограмма начинается с операционного блока 110, смыслом которого является идентификация момента перехода системы в режим незамкнуто-циклового управления, при котором время впрыска топлива определяется (при помощи блок-операции 103, см. фиг. 3), помимо всего прочего, в зависимости от концентрации выхлопных газов, регистрируемой датчиком 25; при положительном результате тестовой идентификации программа переводится на операционный блок 111, при выполнении которого определяется, находится ли система управления, работающая в замкнуто-цикловом режиме, в состоянии запредельного насыщения (фиг.7с), что осуществляется методом оценивания при параметрическом условии, что поправочный коэффициент KLAMBDA, вычисляемый в результате выполнения операции (блока) 102, показанного на фиг.3, достиг предельного значения KLAMBDAO, при отрицательном результате программа переводится на операционный блок 112 (на который программа переводится и в случае отрицательного результата при выполнении блок-операции 110), который обнуляет индикатор BACKVP, что означает отсутствие условий для немедленной переадресовки поправочного коэффициента KADAT, записанного по текущему адресу ADDRNW в оперативной памяти RAM 38 с произвольной выборкой, в соответствующий адрес основного запоминающего устройства RAM 39. От блока 112 операционная программа переходит к блок-оператору 114, содержание которого будет рассмотрено подробно ниже и который контролирует фазу вычисления нового скорректированного значения TI1времени впрыска топлива. В случае позитивного исхода идентификации условий, осуществляемой блок-оператором 111 (т.е. функционирования системы в режиме замкнуто-контурного управления с пороговым насыщением), выполнение программы переходит к операционному блоку 115, который выводит индикатор BACRVP на единицу, что означает переход в режим переадресовки поправочного коэффициента KADAT, хранящегося по соответствующему адресу в устройстве оперативной памяти RAM 38, в соответствующий адрес ADDRNW основной памяти RAM 39. От блока 115 рабочая программа переходит к блоку 116, который идентифицирует выход текущего значения параметра N (число оборотов вала двигателя 1) или параметра PFARF (положение дроссельной заслонки 6) за предельное значение NL или PFARFL, соответственно (фиг.9), что будет означать, что рабочий режим двигателя 1 соответствует зоне 51, а не зоне 50: при отрицательном результате такой тестовой идентификации программа переходит к выполнению операции (блока) 117, смыслом которой является отдача команды на перенос (трансляцию) поправочного коэффициента KADAT, хранящегося в оперативной памяти RAM 38 по адресу ADDRNW соответствующей зоны 50, в соответствующий адрес ADDRNW основной памяти RAM 39; в свою очередь, при положительном результате тестирования, регистрируемом в результате выполнения блок-операции 116 (когда режим работы двигателя 1 приходится на одну из зон 51), операционная программа переходит к блоку 118, при выполнении которого формируется команда на передачу поправочного коэффициента KADAT, записанного в запоминающее устройство RAM 38 по адресу ADDRNW, находящемуся в зоне 50 вблизи указанной текущей, используемой зоны 51, в соответствующий адрес ADDDRNW в основной памяти RAM 39.
От операционных блоков 117 и 118 программа переходит к выполнению блок-операции 114, содержанием которой является пороговое детектирование - аналогично операции 116 - превышения текущим значением параметра N или параметра PFARF предельного значения NL и PFARFL соответственно; при отрицательном результате (текущий режим работы двигателя 1 приходится на одну из зон 40) выполнение рабочей программы переходит к блоку 119, содержанием которого является выдача команды на вычисление скорректированного значения времени впрыска топлива TI11 за счет модификации ранее определенного значения TI1 этого времени (при выполнении операции 94 в блок-схеме фиг.3) посредством умножения на поправочный коэффициент KADAT, хранящийся по адресу ADDRNW в основной памяти RAM 39. При положительном результате контроля программа переводится от операционного блока 114 (т.е. когда текущие условия функционирования двигателя 1 соответствуют одной из зон 51) к блоку 120, который выдает команду на вычисление скорректированного значения времени TI1 впрыска топлива за счет изменения ранее определенного значения TI1времени впрыска посредством умножения на поправочный коэффициент KADAT, хранящийся в основной памяти RAM 39 по адресу ADDRNW зоны 50 вблизи зоны 51 текущего операционного режима двигателя. Блок 119 вместе с блоком 120 выведены на выход подпрограммного модуля 96.
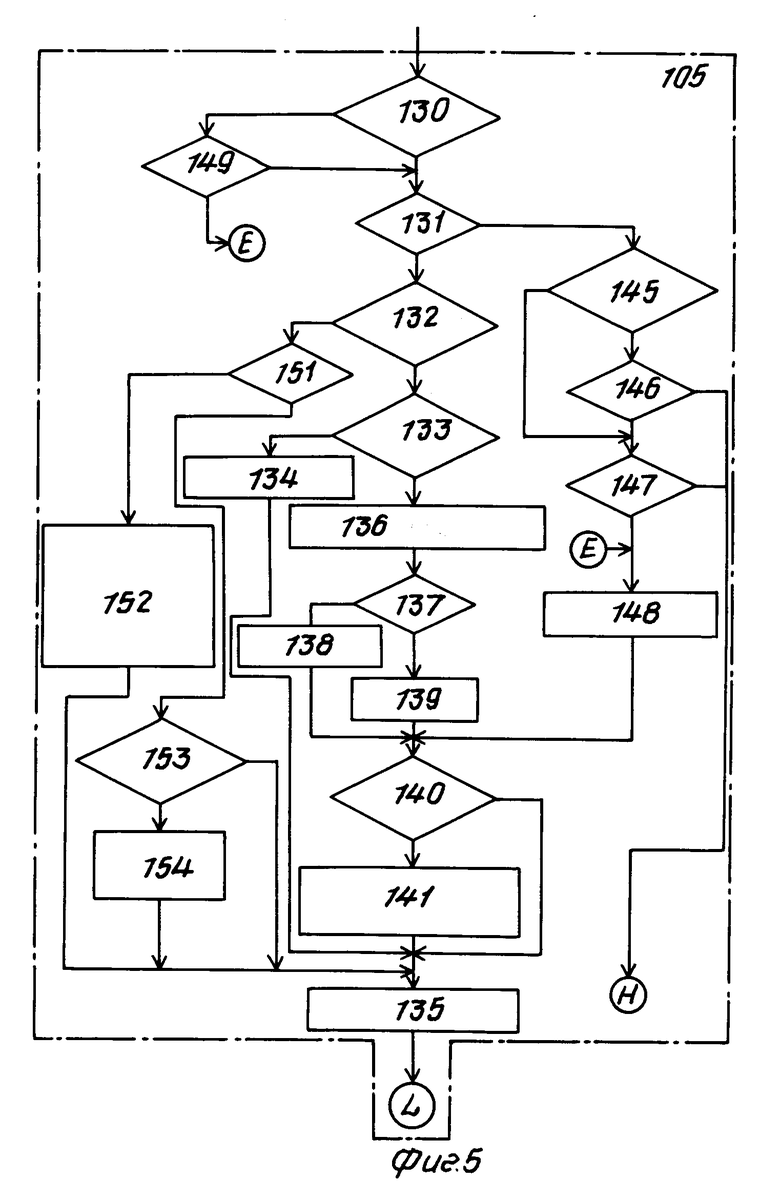
На фиг. 5 и 6 в развернутом виде показана операционная структура подпрограммного модуля 105, который осуществляет вычисление для корректировки поправочных коэффициентов или факторов KADAT. На входе этого модуля программа переходит к операционному блоку 130 (фиг.5), который порогово детектирует, идентифицирует (аналогично операционному блоку 116, показанному на фиг.3) выход текущего значения параметров N или PFARF за предельные значения NL и PFARFL cоответственно; если это не происходит (когда текущие условия функционирования двигателя 1 приходятся на одну из зон 50), задействуется операционный блок 131, который устанавливает, находится ли сигнал 24, применяемый от датчика 25, между уровнями 0 и 1 (условия, отображенные на фиг.7а или 7b), и если это так, выполнение программы переводится на блок 132, который устанавливает, является ли адрес ADDRNW, селектированный в результате выполнения блока 95, показанного в схеме фиг.3, аналогичным тому, который был выбран в предыдущем цикле программы. В положительном случае (устойчивый режим работы двигателя 1 приходится на ту же зону N - PRARF - плоскости, показанной на фиг.9) выполнение программы переходит к операционному блоку 133, который идентифицирует выход счетчика CNTRIT на уровневое значение SATRIT, записанное в стираемое программируемое запоминающее устройство EPROM 41; в отрицательном случае программа действий переходит к блоку 134, содержанием которого является прибавление единицы к показанию указанного счетчика CNTRIT (т.е. CNTPI = CNTPI+1), после чего выполнение операций переходит к блоку 135, смыслом которого является запись в регистр ADDROLD текущего адреса ADDRNW, селективно задаваемого блоком 95 (показанным на фиг. 3), в целях сравнения в следующем цикле и идентификации, будет ли двигатель 1 оставаться в той же зоне или участке N - PFARF - плоскости параметров (фиг.9) или нет. В случае положительного ответа, регистрируемого блоком 133 (т. е. если режим работы двигателя 1 остается достаточно продолжительное время в той же зоне параметрической N - PFARF - плоскости, показанной на фиг.9), задействуется блок 136, в соответствии с которым происходит вычисление значения постоянной составляющей (KADTDC) поправочного коэффициента KLAMBDA (фиг. 7b) в качестве среднего значения по двум величинам этого коэффициента по меньшей мере двух информационных посылок (A; B) сигнала 24 от датчика 25. Далее выполнение программы переходит от операционного блока 136 к блоку 137, который означает идентификацию выхода показания второго счетчика CNTCL на соответствующее значение SATCL, также хранящееся в памяти EPROM 41; если это условие не реализовано, программа переходит к блоку 138, операционным действием которого является прибавление единицы к показанию счетчика CNTCL, т.е. CNTCL - CNTCL + 1, после чего задействует операционный блок 140, который определяет, превосходит ли значение постоянной составляющей (KADTDC) поправочного коэффициента KLAMBDA (фиг.7b), вычисляемой при осуществлении операции 136, соответствующие пороговые значения ВП1 и ВП2, являющиеся положительными и отрицательными величинами, записанными в стираемую программируемую память ЕPROM 41. При отрицательном результате идентифицирования выполнение программы переходит напрямую от блока 140 к блоку 135, в результате чего на выход рассматриваемого подпрограммного модуля выводится обновленное значение поправочного коэффициента KADAT. В свою очередь, при положительном результате идентификации операционные действия проводятся до блока 135 через блок 141, который изменяет величину поправочного коэффициента KADAT, хранящегося в запоминающем устройстве с произвольной выборкой RAM 38 по адресу ADDRNW, на величину STEP, записанную в стираемое программируемое устройство памяти EPROM 41.
В случае положительного решения при идентификации операционным блоком 137 (что означает, что условия функционирования двигателя 1 остаются в той же зоне параметрической N - PFARF - плоскости, показанной на фиг.9, в течение достаточно большого интервала времени) программа действий переходит к операционному блоку 139, который выставляет индикатор на единицу (FLVALD = 1), что означает условное разрешение на перенос поправочного коэффициента KADAT из памяти RAM 38 запоминающего устройства на соответствующий адрес ADDRNW в основное запоминающее устройство RAM 39. От блока 139 выполнение рабочей программы переходит к блоку 140.
В случае отрицательного решения по результатам идентификационного опроса, осуществленного блоком 131 (при котором сигнал и значения от датчика 25 концентрации выхлопных газов не поступают), задействуется операционный блок 145, смыслом которого является установление факта выхода текущего значения параметра PFARF за нижний предел PFARFO (cоответствующий минимальному открыванию впускного канала дроссельной заслонкой 6): при положительном результате идентификации (т. е. при отпущенной педали акселератора 8) выполнение операционной программы переходит к блоку 146, при реализации которого устанавливается, меньше ли текущее значение параметра 11 нижнего предела 110 (соответствующего минимальному числу оборотов двигателя 1). При положительном выводе выполнение программы переводится от блока 146 на выход рассматриваемого подпрограммного модуля 105 без изменения поправочного коэффициента KADAT, в то время как при негативном результате идентифицирования блоками 145 и 146 программа выходит на операционный блок 147, который определяет, выведен ли индикатор BACKVP на единицу (что означает подачу команды на немедленную запись, засылку коэффициента KADAT в основную память RAM 39): в негативном случае программа выводится на выход субмодуля 105, в то время как при положительном исходе опросного идентифицирования (замкнуто-контурное управление в режиме порогового насыщения) делается переход к операционному блоку 148, который приравнивает константную составляющую (KADTDC) поправочного коэффициента KLAMBDA (фиг.7с) его величине, соответствующей пороговому режиму насыщения (KLAMBDAO), после чего выполнение программы переходит к операционному блоку 140, смыслом которого является проведение вычисления для текущего модифицирования поправочного коэффициента KADAT и в режиме насыщения.
Если результат тестирования при исполнении блока 130 оказывается положительным (т. е. действующий режим работы двигателя 1 приходится на одну из зон 51), тогда выполнение рабочей программы переходит к блоку 149, который проверяет равенство показания индикатора BACКVP единице, (т.е. BACКVP = 1, что означает формирование команды на немедленную запись значения поправочного коэффициента KADAT в основную память с произвольной выборкой RAM 39): при отрицательном результате контроля задействуется операционный блок 131, в то время как при положительном результате (замкнуто-контурное управление в режиме порогового насыщения) - блок 148.
Если идентификация при выполнении блок-операции 132 дает негативный результат (т.е. зона рабочего режима двигателя 1 меняется в параметрической плоскости N - PFARF, показанной на фиг.9, относительно той зоны, которая была заадресирована в предыдущем цикле), выполнение рабочей программы переходит к блоку 151, который проверяет, равно ли показание индикатора FLVALD единице: при положительном исходе (что означает наличие разрешающих условий для перезаписи значения поправочного коэффициента KADAT из запоминающего устройства RAM 38 на соответствующий адрес ALLRNW в основное запоминающее устройство RAM 39) выполнение программы перехода к операции 152, содержанием которой является формирование команды на осуществление трансляции поправочного коэффициента KADAT из запоминающего устройства RAM 38 в основную память RAM 39 по соответствующему адресу ADDROLD в целях проведения вычисления и текущего обновления данных в той же зоне, которая использовалась и в предыдущем цикле. Помимо этого операционный блок 152 осуществляет обнуление показаний счетчиков CNTRIT и CNTCL и устанавливает индикатор FLVALD в нуль, что означает, что перезапись поправочного коэффициента KADAT в основное запоминающее устройство RAM 39 произведено. От блока 152 программа переходит к операционному блоку 135. В случае отрицательного результата идентифицирования блоком 151 (т.е. отсутствия условий санкционированной перезаписи значения поправочного коэффициента KADAT в основное запоминающее устройство RAM 39) выполнение рабочей программы передается операционному блоку 153, который аналогично блок-операции 130 определяет, превосходит ли текущее значение параметра N или параметра PFARF предельное значение NL и PFARFL соответственно; при отрицательном результате такого контроля (т.е. когда текущий режим работы двигателя 1 приходится на одну из зон 50) выполнение операционных действий переходит к блоку 154, смыслом которого является обнуление показаний счетчиков CNTRLT и CNTCL с целью инициализации новой фазы изменений (модифицирования) поправочных коэффициентов, а затем задействуется операционный блок 135, в то время как при положительном результате контроля при реализации блок-операции 153 (означающем переход рабочего режима двигателя 1 в зону 51 рядом с зоной 50, в которой он перед этим находился и, соответственно, где перед этим производилось модифицирование поправочного коэффициента) выполнение рабочей программы передается напрямую блоку 135, реализация которого позволяет продолжать текущее обновление значений этого поправочного коэффициента, который одинаков и для зоны 50 и для смежной зоны 51.
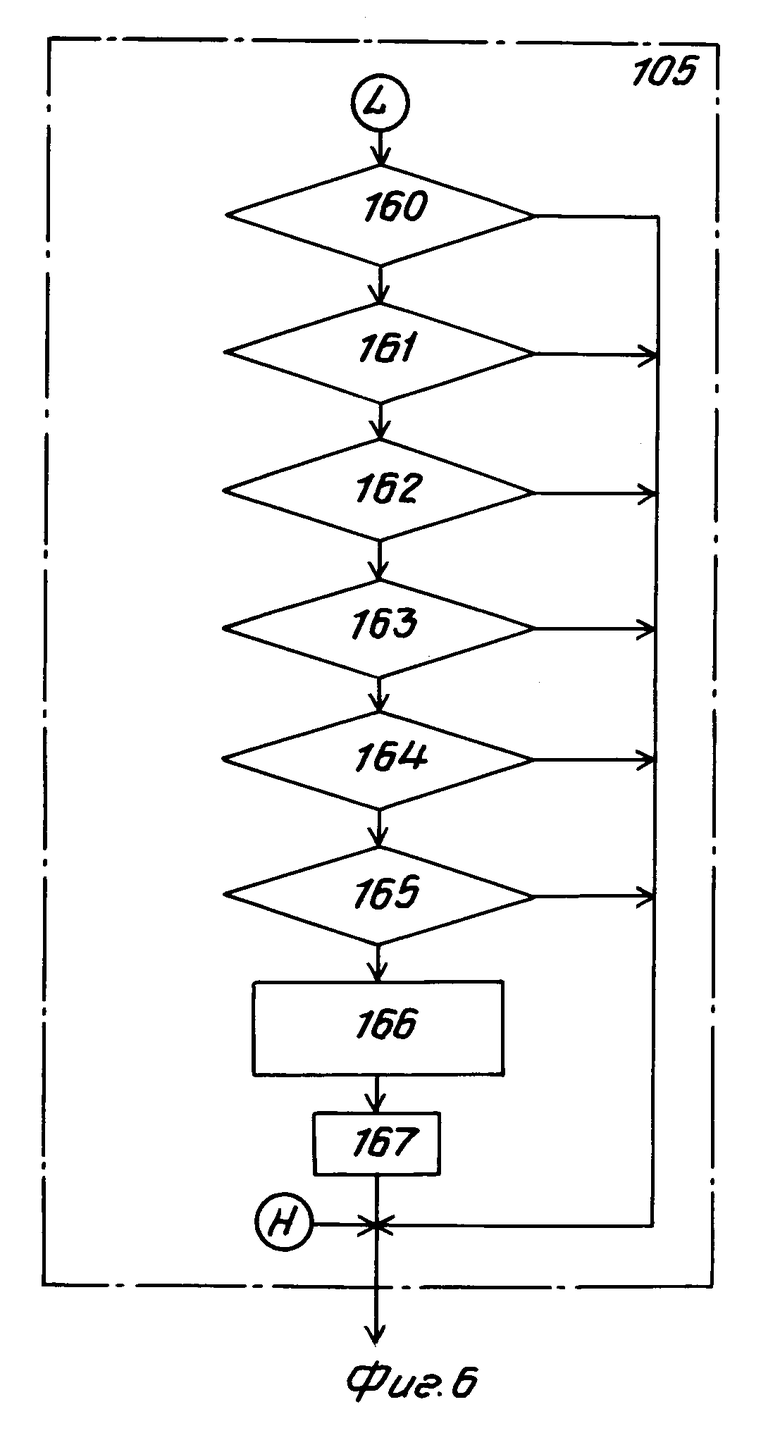
От блока 135 выполнение рабочей программы переходит к операционному блоку 160 (фиг.6), который образует в рассматриваемой системе начало вычислительной сети, использующейся для оценки различных поправочных коэффициентов коррекции KADAT по различным зонам 50, последовательно по порядку после осуществления вычисления первого такого коэффициента зоны 50 для режима работы двигателя 1 на малых оборотах; в частности, блок 160 производит идентификацию при необнуленном начальном индикаторе, относится ли программа вычислений к первому циклу осуществления алгоритма управления данной системы, причем при отрицательном результате такой идентификации вычислительная цепь выводится на выход модуля 105, в то время как при положительном результате вычисления проводятся последовательно по всей этой цепи (сети) и выходят на операционный блок 161, который идентифицирует выход текущего значения параметра PFARF за нижний предел этого параметра, обозначенный как PFARFO (что соответствует минимальному приоткрытию дроссельной заслонки 6). При отрицательном результате такой идентификации выполнение программы выводится на выход модуля 105, в то время как при положительном результате операционные действия передаются блоку 162, который проверяет, находится ли система замкнуто-контурного управления в режиме порогового насыщения, оценивая при этом выход поправочного коэффициента KLAMBDA, вычисляемого операционным блоком 102 (фиг.3), на предельное значение KLAMBDAO; при положительном результате такого идентифицирования программа выводится на выход модуля 105, в то время как при отрицательном результате выполнение действий переходит к блоку 163, который устанавливает, выведено ли показание индикатора FLVALD на 1, что означает условие разрешения записи поправочного коэффициента KADAT в основную память RAM 39 в упомянутом режиме низкооборотной работы двигателя. При отрицательном результате такого опроса блоком 163 процесс выполнения программы выводится на выход рассматриваемого подпрограммного модуля 105, в то время как при положительном результате операционные действия переходят к блоку 164, который контролирует выход третьего счетчика CNTA, задействуемого вместе со счетчиком CNTCL, на соответствующее значение SATCLT (хранящееся в стираемой программируемой памяти EPROM 41), превосходящее значение SATCL, за счет чего обеспечивается дополнительная временная задержка: при отрицательном результате такого контроля выполнение программы выводится на выход операционного модуля 105, в то время как при положительном результате задействуется операционный блок 165, который устанавливает, превосходит ли значение постоянной составляющей (KADTDС) поправочного коэффициента KLAMBDA (фиг.7b), вычисляемой при реализации блока 136 для указанного низкооборотного режима работы двигателя, соответствующие пороговые значения BN1 и BN2; при отрицательном исходе такой идентификации выполнение операционной программы выводится на выход подпрограммного модуля 105, в то время, как при положительном исходе программа переводится на блок 166, который вычисляет на основе начального значения KADAT, определенного блоком 141 для указанного низкооборотного режима значения, соответствующие другим коэффициентам KADAT для других зон 50, причем эти значения могут определяться в процентном выражении (изменяясь, к примеру, в диапазоне между 100% и 50% при выборе, осуществляемом с использованием опорных значений, хранящихся в стираемом запоминающем устройстве 41); в частности, указанные значения KADAT для зон 50 по мере их удаления от участка, соответствующего низкооборотному режиму, могут уменьшаться пропорциональным образом в сторону 50%-ных значений; для других зон 50 эти коэффициенты KADAT также записываются в энергонезависимое запоминающее устройство с произвольной выборкой RAM 39.
От блока 166 программа действий переходит к блоку 167, который дает команду на обнуление индикатора для выполнения упомянутого цикла при положительном решении блока 160, а также обнуление счетчика CNTA, после чего программа выводится на выход модуля 105.
Преимущества предложенной электронной системы управления впрыском топлива очевидным образом следуют из вышеприведенного описания. По существу, в сумме эти преимущества предопределяются использованием относительно простого и недорогого блока 16 управления, решенного на принципах самонастройки и обеспечивающего эффективное, высокоточное регулирование времени впрыска топлива. В частном аспекте важным положительным качеством такой системы является то, что число обновляемых поправочных коэффициентов KADAT меньше числа зон вычисления базовых значений TI времени впрыска, причем эти коэффициенты относятся к крайне ограниченной области в пределах рабочего диапазона двигателя 1, что позволяет уменьшить объем памяти RAM 39 при сохранении реальной возможности получения соответствующих коэффициентов относительно простым и достаточно точным способом по всей совокупности условий работы контролируемого двигателя 1. При осуществлении непрерывного обнуления указанных адаптационно-поправочных коэффициентов KADAT в запоминающем устройстве RAM 38 (при стабильной работе двигателя 1 и осуществлении замкнуто-контурного контроля концентрации выхлопных газов при помощи датчика 25) и переноса данных в основную память RAM устройства 39 при условии, что зона 50 (фиг. 9), в которой только что работал двигатель, претерпевает изменения, указанный перенос санкционируется сразу же, как только поправочный коэффициент KLAMBDA, определяющийся сигналом от датчика 25, достигнет предельного значения KLAMBDAO, означающего необходимость относительно небольшого модифицирования базового времени впрыска TI, вычисляемого в номинальных исходных условиях функционирования двигателя. В целях функционального упрощения центрального блока 36 управления и обеспечения самонастройки (автоматического регулирования) системы в выходных каскадах и линиях тестирования признано целесообразным использовать начальное идентифицирование значения поправочных коэффициентов KADAT по различным зонам 50 (фиг.9) с адресацией по различным ячейкам памяти RAM 39, что в конкретном исполнении позволяет обеспечить блокировочную защиту величины KADAT, рассчитываемой на начальном рубеже низкооборотного режима работы двигателя.
Использование: в электронных системах управления впрыском топлива в ДВС. Сущность изобретения: электронная система управления содержит форсунку с отверстием для впрыска топлива и центральный блок управления, установленный на впускном канале двигателя. Блок управления содержит центральный процессор, на входы которого поступают сигналы от набора датчиков. На основании сигналов от датчика положения дроссельной заслонки (потенциометра), датчика числа оборотов вала двигателя, датчика концентрации отработавших газов (преобразователя концентрации), датчика температуры охлаждающей жидкости и датчика температуры всасываемого воздуха центральный процессор вычисляет требуемые моменты впрыска топлива в цилиндры. Датчик температуры всасываемого воздуха непосредственно подсоединен к блоку управления. Процессор снабжен блоками, каждый из которых выполнен в виде отдельного вычислителя для определения поправочных коэффициентов и коррекции момента впрыска топлива. 10 з.п.ф-лы, 9 ил.
8. Система по п. 7, отличающаяся тем, что седьмой блок соединяется в пятом блоке со средством идентификации первого рабочего цикла двигателя после первоначальной подачи питания к центральному блоку управления.
| Патент США N 4543937, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
