Изобретение относится к морскому движителю с вертикальной осью и поперечным расположением относительно направления потока, с постоянной управляемой ориентацией лопастей.
Более конкретно, изобретение относится к морскому движителю указанного выше типа, способного удовлетворять требования максимальной гидродинамической эффективности в различных рабочих условиях.
Как хорошо известно, механический движитель с винтами, имеющими горизонтальную ось, является наиболее распространенным движущим устройством ввиду простоты его конструкции и большого количества разных доступных и прошедших гидродинамические испытания типов.
Однако использование этого типа устройства имеет некоторые критические аспекты, которые можно кратко свести к следующим:
1) ограниченный оптимальный диапазон работы (хорошая эффективность только при определенных скоростях);
2) образование видимого вихревого кильватерного следа, высокие значения создаваемых центробежных и тангенциальных сил (легко выявляется наличие заметных потерь энергии);
3) ухудшение характеристик вследствие эффекта корпуса (высокие отклонения свойств винта, который изолирован и установлен на корпус).
Необходимость в уменьшении этих неблагоприятных аспектов приводит к поиску новых, дополнительных или альтернативных решений в создании движителя.
В частности, в случае с вариантами применения, требующими высокой степени бесшумности, внимание сосредотачивается на разработке движителей с вертикальной осью, имеющих ось лопастей, перпендикулярную направлению движения. Поток сталкивается с удерживающим лопасти диском в поперечном направлении и немного отклоняется: конечный результат, с точки зрения воздействия на жидкость, не отличается от воздействия на нее задних ласт морского животного, которое инстинктивно выполняет при движении такие же кинематические функции (результат эволюции приспособления к окружающей среде).
При испытаниях этих движительных систем, проведенных в морском бассейне, выявлены аспекты, которые непосредственно влияют на определение характеристик нового типа движителя и которые заметно повышают его гидродинамические характеристики и их гибкость.
Среди наиболее важного должно быть отмечено следующее: эффект взаимного расположения лопастей, количество лопастей; максимальные углы встречи; соотношение между орбитальным лучом удерживающего лопасти диска и максимальной хордой лопасти; соотношение хорды и удлинения лопасти; конфигурация гидродинамического профиля лопасти.
Первый тип движителя с вертикальной лопастью показан в Патенте US-A-1823169, который описывает движитель с вертикальной лопастью, в котором двигатели с верхним расположением движутся вместе с вращающейся плитой, будучи закрепленными на ней.
Известные в настоящее время движители с вертикальной осью имеют множество вращающихся вокруг своей оси лопастей, удерживаемых вращающимся диском, при этом движение вращающегося диска и вращение лопастей осуществляется единым двигателем и узлом механических соединений. Пример таких движителей описан в Патенте FR-A-2099178.
Говоря в целом, управление ориентацией лопасти осуществляется механической кинематикой на основе углового расположения кривых, имеющих установленную конфигурацию и неподвижных при вращении.
Кроме того, лопасти отличаются симметричным профилем, который не позволяет получить оптимальную эффективность в любом положении и возможной ситуации.
Кроме того, ввиду присущих им свойств, известные движители с вертикальной осью не могут применяться на погружаемых морских средствах.
Известные движители с вертикальной осью относятся к циклоидному или трохоидному типу.
Такая структура содержит в себе решение, которое согласно изобретению позволяет устранить указанные выше недостатки, давая возможность всегда соответствовать различным рабочим условиям при максимальной гидродинамической эффективности.
Решение, предлагаемое настоящим изобретением, допускает независимое вращение каждой лопасти под заданными углами вокруг ее оси при ее вращении вокруг вертикальной оси.
Таким образом, согласно настоящему изобретению, предлагается морской движитель с вертикальной осью (то есть имеющий ось опорных поверхностей, перпендикулярную направлению движения судна), который может использоваться как на надводных средствах, так и на погружаемых средствах, в котором отличительным и новым элементом является способ управления ориентацией лопастей при орбитальном движении удерживающего лопасти диска, дающий возможность самопрограммирования в соответствии с критерием максимальной гидродинамической эффективности.
Движитель, предлагаемый согласно настоящему изобретению, универсален во всем диапазоне скоростей от неподвижного состояния, обычно когда судно начинает движение (большая сила тяги в неподвижном положении и при операциях буксировки), до высокой скорости, и в соответствии с этим, с точки зрения получаемых конфигураций, его производительность выше производительности известных движителей.
В отличие от традиционных винтов и азимутальных движителей, решение, соответствующее настоящему изобретению, допускает ориентацию получаемой силы тяги в пределах 360o и одновременно также позволяет производить торможение.
Кроме того, решение, соответствующее изобретению, осуществляется таким образом, чтобы исключить какие бы то ни было проблемы, связанные с кавитацией лопастей, и таким образом отличается увеличением срока службы в сравнении с традиционными гребными винтами.
Таким образом, конкретной целью настоящего изобретения является создание морского движителя с вертикальной осью и поперечным расположением относительно направления потока, с постоянной управляемой ориентацией лопастей, содержащим множество лопастей, вращающихся вокруг вертикальной оси и удерживаемых плитой, причем плита также вращается вокруг вертикальной оси независимо от вращения отдельных лопастей, отличающегося тем, что он также содержит двигатель для вращения указанной плиты для крепления лопастей, неподвижный импульсный электрический двигатель для каждой лопасти для вращения каждой лопасти вокруг ее собственной вертикальной оси, вращающийся вал, поддерживаемый корпусом ротора, соединенным с плитой для крепления лопастей, на котором расположены шпиндели соосно друг другу и соосно валу и имеют независимое вращательное соединение с вращающимся валом, при этом количество шпинделей соответствует количеству отдельных лопастей, причем шпиндели вращаются независимо один от других так, что они обеспечивают вращение соответствующих лопастей независимо одна от других, вращающийся вал и шпиндели имеют один конец, находящийся в корпусе ротора, и один конец, находящийся снаружи корпуса ротора, причем на внутреннем и наружном концах каждого шпинделя расположено первое средство для передачи движения для передачи движения от соответствующего электродвигателя к соответствующей вращающейся лопасти, а на оси лопасти и на оси соответствующего электродвигателя расположено соответствующее средство для передачи движения для передачи движения первому средству для передачи движения, и одно устройство сопряжения между оператором и электронным блоком управления движителем, при этом электрическими двигателями управляют при помощи электронного блока управления таким образом, чтобы регулировать положение и ориентацию соответствующей лопасти для получения в любой рабочей ситуации лучших характеристик во всем рабочем диапазоне.
Предпочтительно, согласно изобретению, между каждым неподвижным импульсным электродвигателем и соответствующим средством для передачи движения применен электрогидравлический узел.
Также согласно изобретению применяют, по меньшей мере, три лопасти, предпочтительно, от четырех до семи лопастей и более предпочтительно, пять или семь, хотя можно применять большее количество лопастей.
В любом случае, согласно изобретению, лопасти имеют асимметричный профиль.
Трансмиссионное средство, предпочтительно, будет представлять собой средство, по существу, гарантирующее нулевой эффект проскальзывания.
В частности, средство для передачи движения может содержать первый зубчатый шкив, расположенный на оси соответствующего электродвигателя или гидравлического узла, второй зубчатый шкив, удерживаемый на соответствующем шпинделе на части вращающегося вала, расположенный снаружи от корпуса ротора, причем шкивы соединяются друг с другом работающим без проскальзывания приводным ремнем, или цепью, третий зубчатый шкив, удерживаемый на соответствующем шпинделе на конце, расположенном внутри корпуса ротора, и четвертый шкив, удерживаемый осью вращающейся лопасти, причем третий и четвертый зубчатые шкивы соединены вторым работающим без проскальзывания приводным ремнем или второй цепью.
Предпочтительно, передаточное число между разными средствами равно 1:1.
Кроме того, согласно изобретению, импульсные электродвигатели являются шаговыми двигателями.
Также согласно изобретению, могут применяться датчики и/или преобразователи для отображения скорости транспортного средства, скорости вращения плиты для крепления лопастей и положения лопастей относительно корпуса ротора.
Кроме того, согласно изобретению, двигатель, приводящий в действие плиту для крепления лопастей и корпус ротора, может быть электрического или теплового типа.
Настоящее изобретение теперь будет описано с целью иллюстрирования, но не ограничения предпочтительными вариантами его воплощения, при этом будут сделаны ссылки на прилагаемые чертежи, на которых:
Фиг. 1 схематически изображает движение лопастей или варианта выполнения морского движителя, соответствующего изобретению;
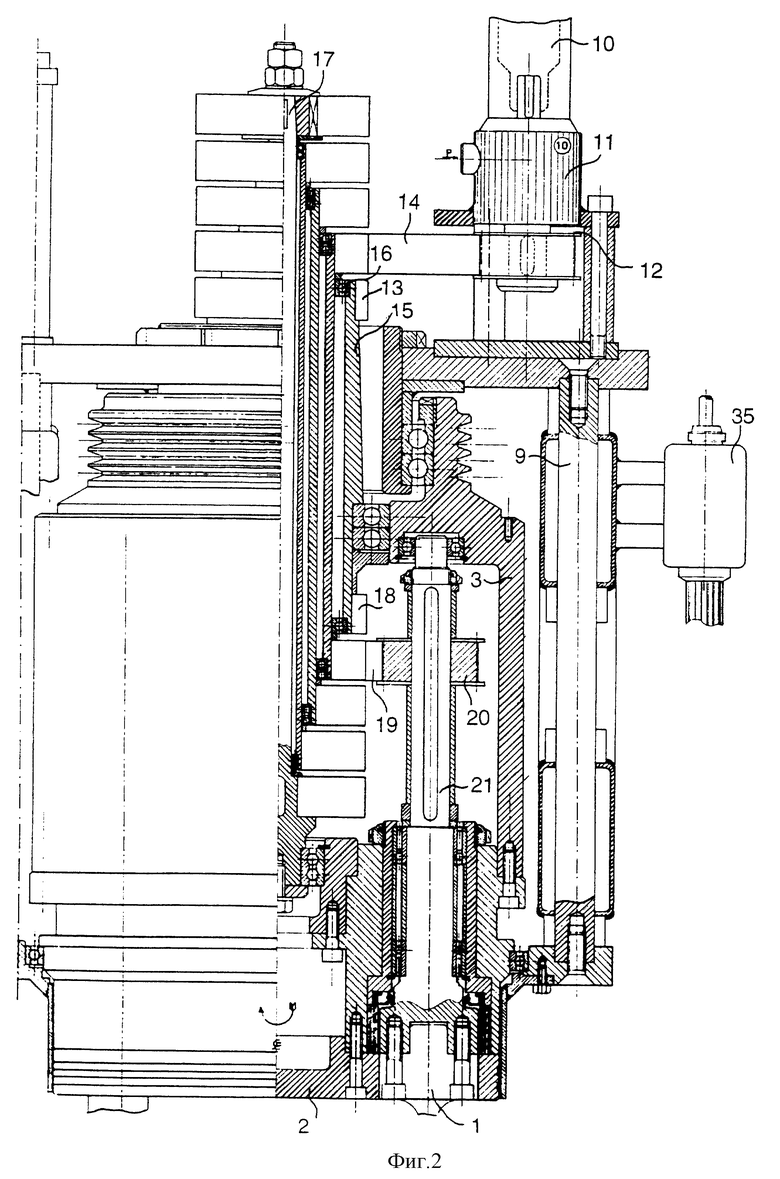
Фиг.2 изображает с частичным сечением вид сбоку варианта выполнения морского движителя, соответствующего изобретению;
и
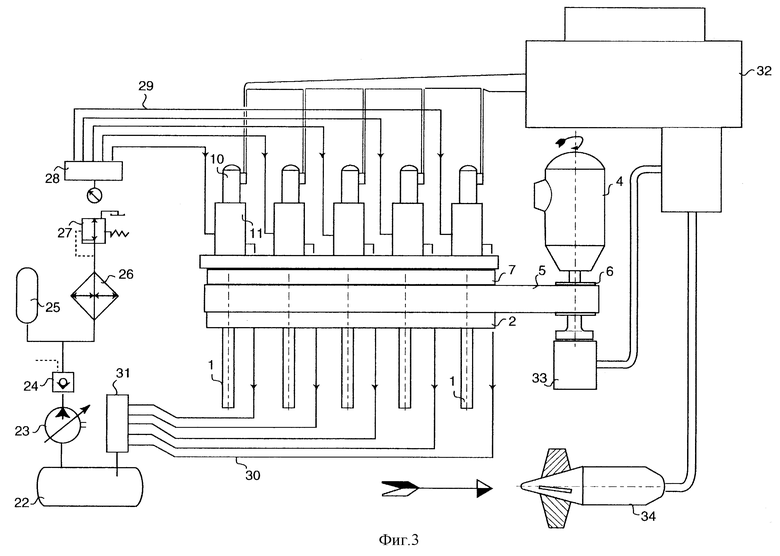
Фиг.3 изображает схему электрогидравлического контура управления морским движителем согласно изобретению.
На прилагаемых чертежах показан вариант выполнения движителя, соответствующего изобретению, имеющего пять вращающихся лопастей.
Однако, следует иметь в виду, что количество лопастей, так же как и другие характеристики, могут изменяться, в любом случае оставаясь в рамках настоящего изобретения.
Теперь, со ссылками на прилагаемые фиг.1-3, будет описана конструкция и работа варианта выполнения морского движителя, соответствующего изобретению.
На фиг.1 изображена схема работы лопастей 1, в частности, пяти лопастей, равномерно разнесенных по окружности плиты 2 для крепления лопастей 1, причем указанная плита 2 вращается с угловой скоростью ω.
Принципы ориентации лопастей 1 будут описаны ниже.
Как можно видеть на фиг.1, профиль лопасти 1 асимметричен и имеет искривления как на внутренней, так и на наружной поверхностях, обеспечивающие постоянную самоориентацию с максимальной гидродинамической эффективностью в любой ситуации, таким образом, получают систему для морских средств, способную удовлетворить требования, выдвигаемые критерием оптимизации гидродинамики, универсальную с точки зрения кинематики и надежную с точки зрения механики (отсутствие системы рычагов, преобразующих механизмов и т.д.), с длительным сроком службы и не требующую значительного обслуживания.
Обратившись теперь к фиг.2, можно видеть конструкцию движителя, выполненного согласно настоящему изобретению.
Плита 2 для крепления лопастей 1 вращается вместе с вращающимся корпусом 3 под воздействием двигателя 4 (см. фиг.3) благодаря размещению работающего без проскальзывания приводного ремня 5 между двумя шкивами 6 и 7.
Каждая из лопастей 1 соединена с плитой 2 выступом и винтами 8.
Электрогидравлические узлы 10-11 установлены на неподвижной раме 9 в количестве, соответствующем количеству лопастей 1.
Указанные электрогидравлические узлы составляют неподвижную часть устройства и состоят из импульсного электродвигателя 10, приводящего в действие соответствующий гидравлический узел 11.
Зубчатая передача 12, установленная на нижней части электрогидравлического узла 10-11, соединена работающим без проскальзывания приводным ремнем 14 с другой зубчатой передачей 13, которая установлена на вертикальном шпинделе 15, вращающемся вокруг вертикального вала 17 на подшипниках 16.
Вертикальный вал 17 удерживает соответствующее зубчатое колесо 18, которое соединено ремнем 19 с зубчатой передачей 20, составляющей единое целое со шпинделем 21 вращения лопасти 1.
Таким образом, неподвижный гидравлический узел 10-11 вращает лопасть 1 вокруг ее оси, при этом ось может вращаться одновременно вместе с плитой 2 корпуса 3.
Каждый из гидравлических узлов 10-11 для каждой из лопастей 1 образует трансмиссию, подобную описанной трансмиссии, с соответствующими зубчатыми колесами 13 и 18, установленными на соосных шпинделях, каждый из которых независимо вращается вокруг оси 17.
Особо ссылаясь на фиг.3, отметим, что электрогидравлический узел предпочтительного варианта воплощения изобретения, по существу, содержит следующие детали:
- емкость 22, содержащую масло (или другую жидкость, имеющую пригодные качества, такие как вязкость, низкая сжимаемость и высокая рабочая температура);
- насос 23 с изменяемой производительностью;
- управляемый контрольный клапан 24;
- масляно-динамическую группу 25, регулирующую давление жидкости;
- нагреватель/теплообменник 26;
- управляемый предохранительный реверсивный клапан 27;
- распределитель 28;
- впускные трубы 29 в количестве, соответствующем количеству лопастей 1;
- электрогидравлический узел 11 каждой лопасти 1;
- возвратные трубы 30 гидравлических узлов 11;
- коллектор 31;
- электрический или эндотермический двигатель 4;
- плиту 2 для крепления лопастей 1, вращаемую двигателем 4;
- электронный блок 32 управления системой;
- датчик 33 угловой скорости для плиты 2;
- датчик 34 скорости поступательного движения движителя;
- шаговый двигатель 10 для каждого из гидравлических узлов 11.
Насос 23 с изменяемой производительностью всасывает масло из емкости 22 и направляет его в распределитель 28. Управляемый контрольный клапан 24 предотвращает движение потока в обратном направлении. Масляно-динамическая группа 25 и нагреватель/теплообменник 26 поддерживают постоянными давление и температуру масла, соответственно, в части гидравлического контура между клапаном 24 и приводами 11. В частности, нагреватель/теплообменник 26 нагревает масло при пуске движителя для достижения им оптимальной рабочей температуры и извлекает тепло из масла при работе. Управляемый контрольный реверсивный клапан 27 контролирует изменение скорости потока, требуемой для расположенной дальше по ходу потока части контура. Распределитель 28 направляет масло во впускные трубы 29, соединенные с электрогидравлическими приводами. Каждый из гидравлических узлов 11 ориентирует соответствующую ему лопасть 1. Затем масло направляется в возвратные трубы 30 гидравлических узлов 11, движется к коллектору 31 и наконец возвращается в емкость 22. Движение каждого из гидравлических узлов 11 и, следовательно, соответствующей лопасти 1 управляется соответствующим шаговым двигателем 10.
Управляющие сигналы для каждого из указанных шаговых двигателей 10 поступают от электронного блока 32 управления системой, который вырабатывает сигналы для ориентации лопастей 1 для оптимизации гидродинамической эффективности движителя в любой момент в качестве функции сигналов, поступающих от датчиков 33 и 34 и преобразователя 35 положения.
Электронный блок 32 управления системой включает, по существу, набор электронных панелей, по количеству соответствующих количеству лопастей 1, причем каждая панель управляет шаговым двигателем 10, относящимся к лопасти 1, и одну электронную панель для общего управления электроникой системы. Каждая из указанных панелей управления лопастями, по существу, состоит из следующих компонентов:
- по меньшей мере один (или более) центральный процессорный блок, такой, как, например, ЦПС (цифровой процессор сигналов);
- по меньшей мере одно (или более) постоянное запоминающее устройство, хранящее программу, выполняемую центральным процессорным блоком;
- по меньшей мере одно (или более) оперативное запоминающее устройство для хранения временных данных обработки;
- входной/выходной интерфейс для сообщения с панелью для общего управления электроникой системы;
- устройства для выработки сигналов привода и/или сообщения с шаговым двигателем и для сообщения с панелью общего управления электроникой системы;
- входной/выходной интерфейс для адаптации приводных сигналов и/или для сообщения сигналов управления и сигналов оперативного контроля с шаговым двигателем 10;
- вспомогательные схемы, такие как, например, схема-регулятор подачи напряжения и схема синхронизации.
Панель общего управления электроникой системы, по существу, состоит из следующих компонентов:
- одного (или более) центрального процессорного блока, такого как, например, ЦПС (цифровой процессор сигналов);
- одного (или более) постоянного запоминающего устройства, хранящего программу, выполняемую центральным процессорным блоком;
- одного (или более) оперативного запоминающего устройства для хранения временных данных обработки;
- входного/выходного интерфейса для сообщения с электронными панелями управления лопастями;
- входного/выходного интерфейса для адаптации сигналов, поступающих от датчиков 33, 34 и преобразователя 35 положения, и/или для передачи сигналов управления и сигналов оперативного контроля датчикам 33, 34 и преобразователю 35 и/или электрическому или тепловому двигателю 4;
- входного/выходного интерфейса для соединения с устройствами, сообщающимися с оператором, например, для отображения данных о рабочих характеристиках движителя, для приема информации о требуемом направлении силы тяги и для переключения с автоматического режима работы на ручной и обратно;
- вспомогательных схем, таких как, например, схема-регулятор подачи напряжения и схема синхронизации.
Программа, выполняемая электронным блоком 32 управления системой, основана на алгоритме обработки, реализующем принципы ориентации лопасти для постоянного обеспечения оптимизации гидродинамической эффективности движителя. Указанные принципы описаны далее со ссылками на фиг.1.
Движители с вертикальной осью отличаются траекторией, которую описывает в пространстве ось лопатки при движении в результате сложения ее вращения вокруг главной оси ротора и поступательного движения главной оси ротора. Указанная траектория описывается в соответствии с отношением Λ скорости Va поступательного движения и радиальной скорости оси лопасти, соответствующей угловой скорости ω вращения диска 2 для крепления лопасти, при R, равном расстоянию между осью лопасти и главной осью ротора (Λ = Vа/ωR). Вторым параметром, отличающим гидродинамическую работу движителя с вертикальной осью, является угол, под которым лопасти 1 встречаются с жидкостью при движении, который далее будет называться ведущим углом α. Величиной, которая функционально зависит от ведущего угла α и которая может рассматриваться вместо угла α для характеристики гидродинамической работы движителя с вертикальной осью, является угол β лопасти, образованный как угол между линией, соединяющей переднюю и заднюю кромки диска 2 для крепления лопастей, и линией хорды контура лопасти.
Для каждой лопасти 1, значение ведущего угла α и, следовательно, значение указанного выше угла лопасти β, соответствующее максимальной гидродинамической эффективности движителя, функционально зависит от трех параметров: угла θ, устанавливающего положение оси лопасти в полярных координатах; значения Λ; угла ϕ, устанавливающего направления тяги движителя относительно продольной оси надводного (или подводного) судна, которое можно относить к указанным выше полярным координатам. Значения двух параметров Λ и ϕ общие для всех функций, дающих значение ведущего угла α (или значение угла β лопасти) для каждой лопасти 1; и наоборот, значение параметра θ изменяется для каждой лопасти 1 при рассмотрении в тех же полярных координатах, и оно может быть получено при помощи одного преобразователя 35 положения, исходя из чего можно вычислить положение каждой лопасти 1 простым прибавлением смещения для каждой лопасти 1. Программа, выполняемая электронным блоком 32 управления системой, вычисляет для каждого момента, определяемого сигналом синхронизации, значение ведущего угла α (или указанное значение угла β лопасти), соответствующее максимальной гидродинамической эффективности движителя, либо вычисляет функцию, через которую оно зависит от мгновенных значений параметров (θ,Λ и ϕ), или считывает из постоянного запоминающего устройства значение α, хранящееся в ячейке, адрес которой зависит от мгновенных значений параметров (θ,Λ и ϕ), и эта адресная зависимость реализуется, например, кодирующим устройством.
Значение Λ оптимизируется для каждого значения Va пригодным изменением значения угловой скорости ω вращения диска 2 для крепления лопастей в соответствии с максимальной гидродинамической эффективностью движителя. Программа, выполняемая электронным блоком 32 управления системой, вычисляет для каждого момента, определяемого сигналом синхронизации, значение угловой скорости ω вращения диска 2 для крепления лопастей и, следовательно, значение Λ, соответствующее максимальной гидродинамической эффективности движителя, либо вычисляет функцию, через которую оно зависит от мгновенного значения параметра Va, или считывает из постоянного запоминающего устройства значение ω, хранящееся в ячейке, адрес которой зависит от мгновенного значения параметра Va, и эта адресная зависимость реализуется, например, кодирующим устройством.
Таким образом, программа, выполняемая электронным блоком 32 управления системой, состоит, по существу, из следующих операций:
- приема, в качестве входных данных, значения угла θ, определяющего положение оси лопасти, полученного при обработке сигнала, поступающего от преобразователя 35, значения угловой скорости ω вращения диска 2 для крепления лопастей, поступающего от датчика 33, значения скорости Va поступательного движения главной оси ротора, поступающего от датчика 34, и значения угла ϕ, определяющего направление тяги движителя относительно продольной оси надводного (подводного) судна, поступающего от пригодных средств сообщения с оператором;
- вычисления значения угловой скорости ω вращения диска 2 для крепления лопастей и, следовательно, значения Λ, соответствующего максимальной гидродинамической эффективности движителя в зависимости от значения скорости Va поступательного движения;
- вычисления значения ведущего угла α (или значения угла β), соответствующего максимальной гидродинамической эффективности движителя, в зависимости от значений угла θ, определяющего положение оси лопасти, соотношения Λ (обработанных данных) и угла ϕ, определяющего требуемое направление тяги движителя);
- передачи соответствующего сигнала управления соответствующему шаговому двигателю 10 для ориентации лопасти 1 в соответствии с вычисленным ведущим углом α (или углом лопасти β);
- передачи соответствующего сигнала управления электрическому или тепловому двигателю 4 для приведения угловой скорости ω вращения диска 2 для крепления лопастей в соответствие с вычисленным значением.
Очевидно, что даже в случае наличия центральных процессорных блоков в каждой панели управления лопастью, обработка данных, общая для всех лопастей 1, такая как вычисление угловой скорости ω, может выполняться панелью общего управления электроникой системы.
Программа также выполняет соответствующие функции для модуляции ω (и Λ) и, следовательно, α в периоды ускорения и замедления движения надводного (подводного) судна.
Зубчатые колеса 13, находящиеся внутри корпуса 3 ротора, вращают планетарные передачи 20 опорных шпинделей 21 соответствующих лопастей 1.
Корпус 3 ротора, действующий в качестве диска 2 для крепления лопасти 1, вращается наружным двигателем 4 (электрическим или тепловым). Синхронизация соответствующих положений диска 2 для крепления лопастей 1 и угла ориентации каждой лопасти 1 очень важна для получения нужных характеристик движителя.
Скорость поступательного движения судна будет определять наиболее пригодную скорость вращения ротора и наилучшее геометрическое расположение лопастей 1 в орбитальной плоскости для каждого момента. Будучи получены асимметричные траектории, которые не могут быть получены какой бы то ни было механической системой.
Движитель, во всем диапазоне скоростей от неподвижного положения в ситуации буксировки до максимальной скорости, возможной для судна, постоянно работает с максимальной эффективностью и одновременно выполняет движительные и рулевые функции при помощи простого и надежного устройства путем распределения мощности на разные оси, что дает возможность получения исключительной маневренности для любого типа судов.
Настоящее изобретение было описано в соответствии с его предпочтительными вариантами воплощения, которые даны только для иллюстрации, а не для ограничения, однако следует понимать, что специалистами в данной области техники могут быть внесены модификации и/или без отхода от относящихся к делу рамок, ограниченных прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С УСОВЕРШЕНСТВОВАННОЙ ДВИЖИТЕЛЬНОЙ СИСТЕМОЙ | 2020 |
|
RU2799627C2 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЬНОЙ УСТАНОВКОЙ НА ВРАЩАЮЩЕЙСЯ ШТАНГЕ | 2018 |
|
RU2770389C2 |
| ПРОПЕЛЛЕР "УСТЮГ" | 2005 |
|
RU2310580C2 |
| СВЕРЛИЛЬНЫЙ СТАНОК С ОДНОЙ ГОЛОВКОЙ | 2012 |
|
RU2615369C2 |
| КОМБИНИРОВАННЫЙ КРЫЛЬЧАТЫЙ ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2023 |
|
RU2806471C1 |
| Плавучая платформа, совмещенная с малыми судами на сжатом пневмопотоке | 2021 |
|
RU2835223C2 |
| Устройство для экспериментальных исследований гидравлических движителей | 1988 |
|
SU1615589A1 |
| Устройство для получения электроэнергии в водной среде | 2023 |
|
RU2800340C1 |
| СУДОВОЙ ДВИГАТЕЛЬ С ГОНДОЛОЙ, УСТАНАВЛИВАЕМОЙ ПОД КОРПУСОМ СУДНА | 2005 |
|
RU2372246C2 |
| ЦИРКУЛЯЦИОННЫЙ НАСОС ДЛЯ СИСТЕМ ОТОПЛЕНИЯ И/ИЛИ КОНДИЦИОНИРОВАНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРНОГО ДЛЯ ТАКОЙ СИСТЕМЫ, И САМА СИСТЕМА | 2005 |
|
RU2377444C2 |
Изобретение относится к судостроению, в частности к морскому движителю с вертикальной осью и поперечным расположением относительно направления потока, с постоянной управляемой ориентацией лопастей. Морской движитель содержит множество лопастей (1), вращающихся вокруг вертикальной оси и удерживаемых плитой (2) для крепления лопастей (1). Плита (2) вращается вокруг вертикальной оси независимо от вращения отдельных лопастей (1). Кроме того, он содержит двигатель для вращения плиты (2), неподвижный импульсный электрический двигатель (10) для каждой лопасти (1) для вращения каждой лопасти (1) вокруг ее собственной вертикальной оси, вращающийся вал (17), удерживаемый корпусом (3) ротора, соединенным с плитой (2), на котором соосно друг с другом и с валом (17) расположены шпиндели (15), имеющие независимое вращательное соединение с вращающимся валом (17). Количество шпинделей (15) соответствует количеству отдельных лопастей (1). Шпиндели (15) вращаются независимо один от других таким образом, чтобы обеспечивать вращение соответствующей лопасти (1) независимо одной от других. Вращающийся вал (17) и шпиндели (15) имеют один конец, расположенный внутри корпуса (3) ротора, и один конец, расположенный снаружи корпуса (3) ротора. На внутреннем и наружном концах каждого шпинделя (15) расположено первое средство (14, 18) для передачи движения для передачи движения от соответствующего электрического двигателя (10) соответствующей вращающейся лопасти (1). На оси лопасти (1) и на оси соответствующего электрического двигателя (10) расположено соответствующее средство (12, 20) для передачи движения для передачи движения первому средству (14, 18) для передачи движения, и один интерфейс между оператором и электронным блоком управления движителем. Электрические двигатели (10) управляются электронным блоком управления с возможностью регулирования положения и ориентации соответствующей лопасти (1). Достигается повышение гидродинамической эффективности в различных рабочих условиях морского движения. 14 з. п. ф-лы, 3 ил.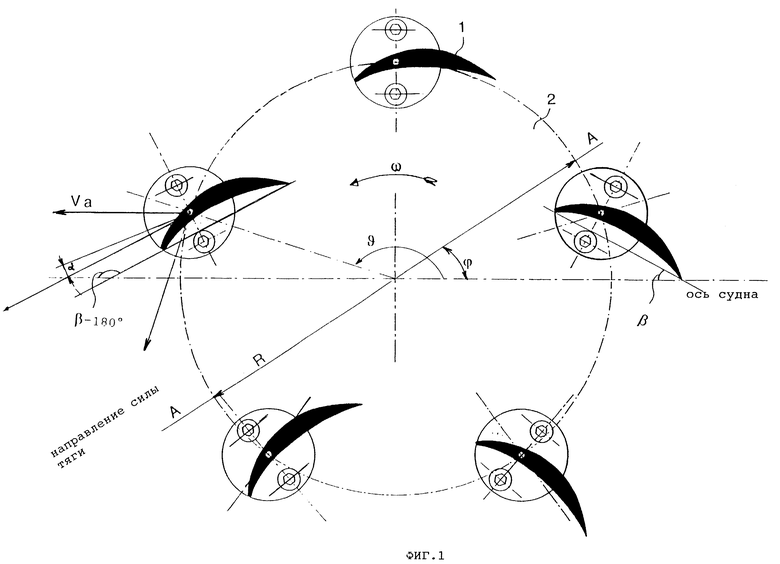
| СОСТАВНАЯ РУКОЯТКА БРИТВЫ | 1993 |
|
RU2099178C1 |
| Крыльчатый движитель | 1972 |
|
SU487807A1 |
| СПОСОБ ПОЛУЧЕНИЯ НАНОЧАСТИЦ СЕРЕБРА С ПОМОЩЬЮ МОДИФИЦИРОВАННОГО ХИТОЗАНА | 2019 |
|
RU2701914C1 |
| US 4084537 А, 18.04.1978. | |||

