Изобретение относится к вибровозбудителям инерционных движителей и может быть использовано в машиностроении и транспорте при получении направленной периодической силы инерции для совершения полезной работы или передвижения транспортного средства.
Наиболее близким к изобретению является вибровозбудитель инерционного движителя, содержащий корпус, инерционно-импульсный преобразователь периодического воздействия в однонаправленное тяговое усилие, выполненный в виде рабочих грузов, закрепленных на концах качающихся кулис, связанных с кривошипным механизмом и установленных с возможностью попеременного движения относительно друг друга в противоположных направлениях, средство связи корпуса с преобразователем и привод. В данном вибровозбудителе используется равномерная или переменная центробежная сила в качестве направленного тягового усилия. Он может быть установлен, в частности, на транспортном средстве.
Недостатками известного вибровозбудителя являются низкий КПД преобразования мощности привода в тяговое усилие и возможность больших амплитуд знакопеременной составляющей тягового усилия, опасных для прочности вибровозбудителя и смежных с ним элементов конструкции, воспринимающих усилия от его корпуса.
Цель настоящего изобретения - повысить КПД и надежность вибровозбудителя.
Поставленная цель достигается тем, что в известном вибровозбудителе инерционного движителя, содержащем корпус, инерционноимпульсный преобразователь периодического воздействия в однонаправленное тяговое усилие, выполненный в виде рабочих грузов, закрепленных на концах качающихся кулис, связанных с кривошипным механизмом и установленных с возможностью попеременного движения относительно друг друга в противоположных направлениях, средство связи корпуса с преобразователем и привод, инерционно-импульсный преобразователь выполнен в виде блоков, установленных, по меньшей мере, на одном общем кривошипном валу, а средство связи корпуса с преобразователем выполнено с возможностью его упругой деформации и соединено с одной стороны с кулисой, а с другой стороны с корпусом.
При выполнении преобразователя с одним общим для всех блоков кривошипным валом, кулисы с рабочими грузами в каждом блоке выполняются в количестве равном трем, а каждый рабочий груз, размещенный между смежными с ним другими рабочими грузами, берется больше каждого из ним по массе в два раза, при этом кривошипы, связанные с кулисами с большими рабочими грузами, повернуты в каждом блоке относительно кривошипов, связанных с кулисами с меньшими рабочими грузами, на 180о.
При выполнении преобразователя с двумя общими для всех блоков параллельными кривошипными валами, кулисы с рабочими грузами в каждом блоке выполняются в количестве равном двум и устанавливаются по одной на каждом валу.
При выполнении преобразователя с числом блоков более одного кривошипы смежных блоков, для снижения уровня знакопеременных вибрационных нагрузок на смежные с вибровозбудителем элементы устройств, выполняются повернутыми друг относительно друга вокруг оси вращения в одном и том же направлении на угол 360/N градусов, где N - число блоков.
С целью обеспечения самоуравновешивания вибровозбудителя блоки и кривошипы преобразователя располагаются зеркально-симметирично относительно плоскости перпендикулярной оси кривошипного вала.
Средство связи корпуса с преобразователем может быть выполнено в виде пружины (растяжения, сжатия, кручения, изгиба), соединенной неподвижно одним концом с нижним концом кулисы, а другим - с основанием корпуса. При этом жесткость пружины выбрана из соотношения равенства частоты свободных колебаний кулисы с грузом частоте вращения кривошипного вала.
На фиг. 1 приведена кинематическая схема вибровозбудителя, преобразователь которого содержит один общий кривошипный вал; на фиг. 2 - вибровозбудитель, преобразователь которого содержит два общих кривошипных вала; на фиг. 3 и 4 - его отдельные фрагменты; на фиг. 5 - упрощенная схема вибровозбудителя с преобразователем состоящим из 4-х блоков; на фиг. 6 и 7 приведены для пояснения принципа действия вибровозбудителя.
Вибровозбудитель инерционного движителя состоит из корпуса 1, двигателя привода 2, одного блока инерционно-импульсного преобразователя 3 и средств связи 4 преобразователя с корпусом. Преобразователь содержит один общий кривошипный вал 5, каждый кривошип которого связан через кулисные камни 7 с тремя кулисами 8, 9, 10, несущими рабочие грузы 11, 12, 13. Рабочий груз 12, размещенный между смежными с ним равными по массе рабочими грузами 11 и 13 больше каждого из них по массе в два раза, при этом кривошип, связанный с кулисой 9 несущей больший груз 12, повернут в блоке относительно кривошипов, связанных с кулисами 8 и 10 с меньшими грузами, на 180 градусов. Средства связи 4 выполнены с возможностью их упругой деформации. Каждая кулиса имеет ось качания 14, закрепленную в корпусе 1. Кривошипный (коленчатый, эксцентриковый) вал 3 уравновешен с помощью противовесов 15.
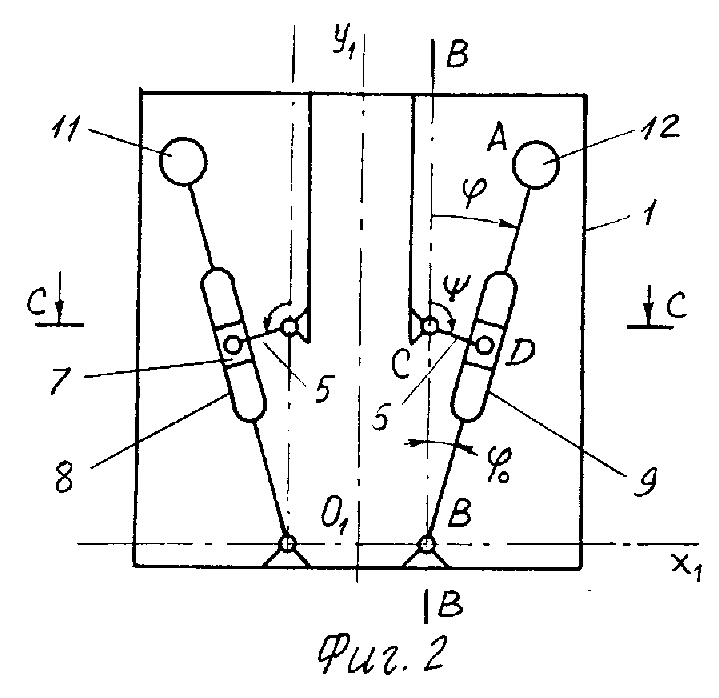
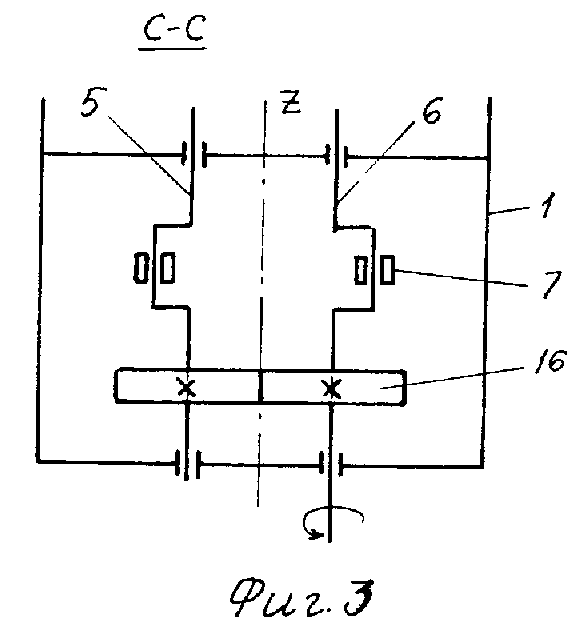
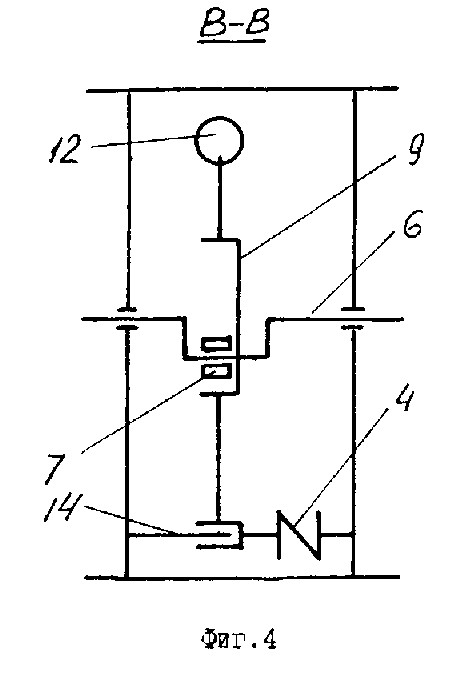
На фиг. 2 и 3 представлены фрагменты кинематической схемы вибровозбудителя, содержащего преобразователь с двумя общими для всех блоков преобразователя параллельными кривошипными валами 5 и 6. На фиг. 2 показан один блок такого преобразователя, который содержит кулисы 8 и 9, несущие рабочие грузы 11 и 12; при этом каждая из кулис блока связана через кулисный камень 7 со своим, общим для всех блоков, кривошипным валом. На фиг. 3 (сечение С-С фиг. 2 при Ψ=90о) показан случай вращения валов 3 и 4 в противоположных направлениях, обеспечиваемого двумя одинаковыми цилиндрическими шестернями 16. Сечение блока плоскостью В-В при Ψ=0о (см. фиг. 2) дано на фиг. 4, где показано средство связи преобразователя с корпусом в виде упруго-деформируемого элемента 4.
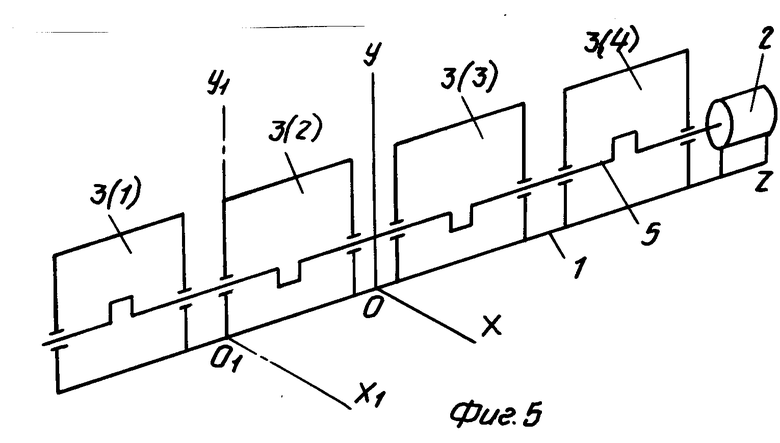
На фиг. 5 дана схема вибровозбудителя инерционного движителя, состоящего из корпуса 1, двигателя привода 2, 4-х блоков преобразователя 3(1), 3(2), 3(3), 3(4) и средств связи, идентичных блоку 3 и средствам связи 4, показанным на фиг. 1. На представленной фиг. 5 показан вариант, когда блоки объединены одним общим кривошипным валом 5, содержащем 12 кривошипов. На фиг. 5 условно показаны только по одному кривошипу от каждого блока и притом кривошипы, связанные с большими массами 12 (см. фиг. 1); остальные кривошипы и элементы схемы, содержащиеся на фиг. 1 для простоты схемы опущены. Вибровозбудитель зеркально симметричен относительно плоскости ХОY в целях самоуравновешивания, а кривошипы блоков 3(1) и 3(4) повернуты в плоскости вращения по отношению к кривошипам блоков 3(2) и 3(3) на 180 градусов.
Вибровозбудитель работает следующим образом.
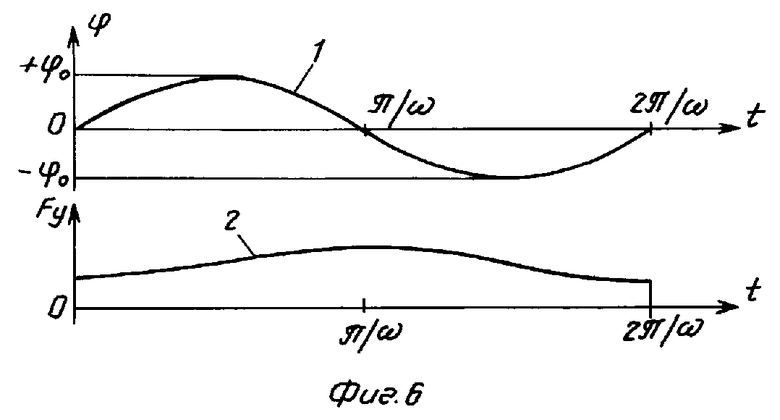
При вращении кривошипного вала 5 (см. фиг. 1 и фиг. 2) с частотой ωкулисы вибропреобразователя совершают качательные движения в пределах угла качания -ϕо<ϕ<+ϕопреодолевая при этом упругое сопротивление средств связи 4. Создаваемые при этом каждым блоком 3 преобразователя одно направленные тяговые усилия складываются в приложенную к корпусу 1 вибровозбудителя равнодействующую, направление которой параллельно осям О1У1 и ОУ (см. фиг. 5), а величина периодически меняется. Типичный характер изменения за период времени 0<t<2π/ω (время одного оборота кривошипного вала) величины тягового усилия Fу, развиваемого одним блоком преобразователя предлагаемого вибровозбудителя, показан на фиг. 6 (кривая 2); там же нанесена зависимость величины текущего угла качания кулисы от частоты вращения ω кривошипа и текущего времени t (кривая 1).
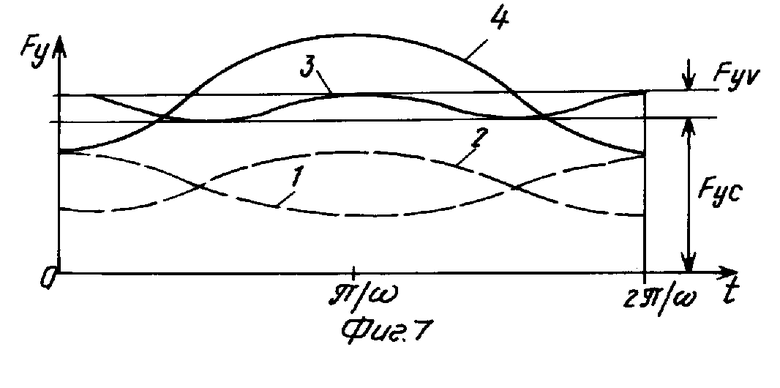
На фиг. 7 в качестве примера показано изменение величины тягового усилия вибровозбудителя, показанного на фиг. 5, и влияние на его характер относительного расположения кривошипов на валу. На фиг. 7 кривая 3 показывает изменение величины равнодействующей силы инерции, приложенной к корпусу 1 (см. фиг. 5) вибровозбудителя, которая является результатом сложения сил от блоков 3(1) и 3(4) (кривая 2) и сил от блоков 3(2) и 3(3) (кривая 1). Там же нанесена кривая 4, полученная для случая, когда кривошипы смежных блоков не повернуты друг относительно друга на предлагаемую величину 360/N градусов. Увеличивая число блоков N в преобразователе и выполняя при этом кривошипный вал с повернутыми кривошипами, можно обеспечить сколь угодно малую величину отношения Fyv/Fyc, где Fyv - пульсирующая составляющая, а Fyc - постоянная составляющая равнодействующей тяговых усилий блоков (см. фиг. 7).
Пример расчетного сравнения вибровозбудителей, имеющего и не имеющего предлагаемого средства связи в виде рессоры кручения, показывает, что для первого необходим двигатель приблизительно на порядок меньшей мощности, чем для второго, при одинаковой величине создаваемого ими инерционного усилия.
Предлагаемый вибровозбудитель может быть использован как в качестве вибровозбудителя инерционного движителя, способного сообщить определенное ускорение любому твердому телу, так и в качестве специального вибратора, создающего вибрационное усилие, имеющее как постоянную так и знакопеременную составляющие. В качестве "любого твердого тела" при этом может рассматриваться, в частности, любое транспортное средство (земное или космическое). Существенным преимуществом инерционного движителя с предлагаемым вибровозбудителем по сравнению с известными движителями является как отсутствие необходимости воздействия на окружающую среду, так и отсутствие необходимости потери исходной массы для обеспечения перемещения транспортного средства в пространстве. Это открывает возможность использования движителя с предлагаемым вибровозбудителем одинакового эффективно и в земных условиях, и в условиях ближнего космоса, и в условиях дальнего космоса, т.е. возможность создания универсального транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОВОЗБУДИТЕЛЬ ИНЕРЦИОННОГО ДВИЖИТЕЛЯ | 1992 |
|
RU2026504C1 |
| СПОСОБ И СИСТЕМА ЖИДКОСТНОГО ОХЛАЖДЕНИЯ И ПОДОГРЕВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2117780C1 |
| СПОСОБ И СИСТЕМА ПОДОГРЕВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2153098C1 |
| МАЯТНИКОВЫЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2096657C1 |
| ЦЕНТРОБЕЖНО-СИЛОВОЙ ДВИЖИТЕЛЬ (ВАРИАНТЫ) | 2001 |
|
RU2223192C2 |
| БЕСШАТУННЫЙ ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1996 |
|
RU2122638C1 |
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2006627C1 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ | 2017 |
|
RU2664853C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
Использование: вибровозбудители инерционных движителей, в машиностроении и транспорте при получении направленной периодической силы инерции для совершения полезной работы или передвижения транспортного средства. Сущность изобретения: вибровозбудитель инерционного движителя содержит корпус 1, инерционно-импульсный преобразователь 3 периодического воздействия в однонаправленное тяговое усилие, средство связи 4 корпуса с преобразователем 3 и привод 2. Инерционно-импульсный преобразователь 3 выполнен в виде одного или нескольких блоков преобразователя, установленных на одном общем или на двух параллельных общих кривошипных валах 5, соединенных с приводом 2. При числе блоков N, большем одного, кривошипы смежных блоков повернуты друг относительно друга вокруг оси вращения в одном и том же направлении на угол 360/ N градусов. Блоки могут быть расположены зеркально-симметрично относительно плоскости, перпендикулярной оси вращения. Блок преобразователя выполнен в виде рабочих грузов 11, 12, закрепленных на концах качающихся кулис 8, 9, 10, связанных с кривошипами вала 5 и установленных с возможностью попеременного движения относительно друг друга в противоположных направлениях, а средство связи 4 корпуса с преобразователем выполнено с возможностью его упругой деформации и соединено с одной стороны с кулисой 8, 9, 10, а с другой стороны - с корпусом 1. Средство связи 4 корпуса с преобразователем 3 может быть выполнено в виде пружины 14 (растяжения, сжатия, кручения, изгиба). 5 з.п. ф-лы, 7 ил.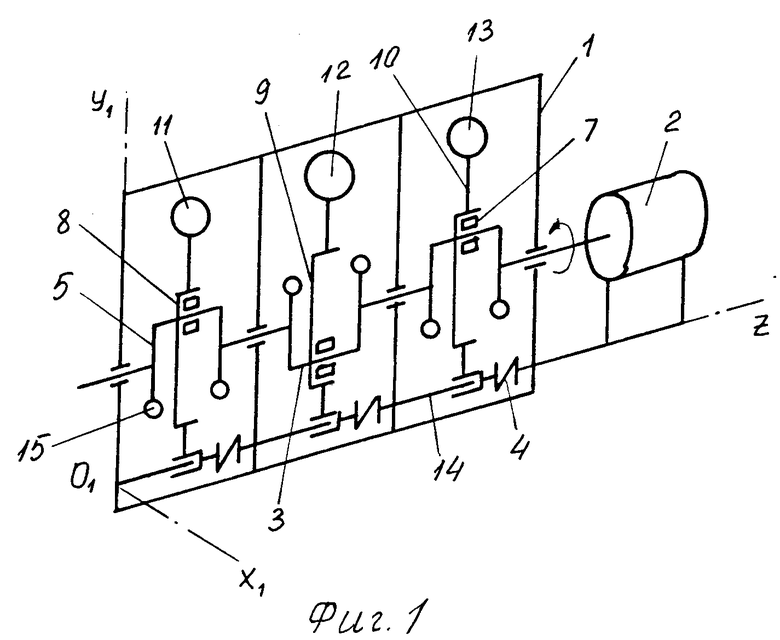
| ВЕТРОВАЯ АККУМУЛИРУЮЩАЯ ЭЛЕКТРОСТАНЦИЯ | 1995 |
|
RU2101562C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
