Изобретение относится к энергетическим установкам и может быть использовано, например, при передвижении транспортного средства.
Наиболее близким по совокупности совпадающих существенных признаков и выбранный в качестве прототипа для первого варианта движителя является центробежно-силовой движитель, содержащий корпус с установленными в нем, по крайней мере, парой рычагов расчетной длины с жестко прикрепленными грузами расчетного веса (расчетной массы) для создания тяги за счет центробежных сил, возникающих при качательном синхронном в противоположном направлении движении рычагов, соединенных посредством шатунов с кривошипами коленчатого вала, и подвижно вращательно закрепленных на общей неподвижной оси. (См. Патент на изобретение РФ 2095625, F 03 G 3/00, F 03 G 7/08, опубл. 11.10.1997).
Для второго варианта двигателя взят тот же прототип.
Недостатком известного движителя является низкий КПД преобразования мощности привода в тяговое усилие, вследствие наличия значительных инерционных сил от амплитуд знакопеременных составляющих тягового усилия и, кроме того, опасных для прочности движителя.
Технической задачей предлагаемого изобретения является разработка вариантов инерционно-силового движителя, обеспечивающих высокие КПД и надежность устройства.
Поставленная задача по первому варианту решается таким образом, что в известном центробежно-силовом движителе, содержащим корпус, по крайней мере, пару рычагов расчетной длины с жестко прикрепленными грузами расчетной массы для создания тяги за счет центробежных сил, возникающих при синхронном в противоположном направлении движении рычагов, привод рычагов с грузами, согласно изобретению, рычаги установлены жестко в одной плоскости на параллельных кинематически связанных валах, установленных на каретке, симметрично относительно продольной оси каретки, смонтированной на корпусе с возможностью возвратно-поступательного перемещения вдоль ее продольной оси в плоскости, перпендикулярной валам, а каретка снабжена средством, расположенным в плоскости вращения грузов на линии направления суммарной центробежной силы грузов, для взаимосвязи с ведомым коленвалом.
При этом кинематическая связь между валами выполнена в виде установленной на валах пары цилиндрических зубчатых колес с передаточным отношением 1: 1.
По второму варианту поставленная задача решается таким образом, что в известном центробежно-силовом движителе, содержащем корпус, по крайней мере, пару рычагов расчетной длины с жестко прикрепленными грузами расчетной массы, подвижно вращательно закрепленных па общей неподвижной оси, для создания тяги за счет центробежных сил, возникающих при синхронном в противоположном направлении движении рычагов, привод рычагов с грузами, согласно изобретению, движитель снабжен третьим рычагом с грузом, подвижно установленным на неподвижной оси, причем ось установлена на каретке, смонтированной на корпусе с возможностью возвратно-поступательного перемещения вдоль продольной оси каретки в плоскости, перпендикулярной оси с грузами, при этом крайние грузы установлены в одной плоскости, проходящей через ось, имеют одинаковую массу, в сумме равную массе груза, расположенного посередине, и развернуты относительно последнего на 180o.
При этом рычаги снабжены ступицами, а привод параллельными кинематически связанными между собой двумя валами, установленными на каретке параллельно оси, причем кинематические связи между валами и между валами и осью выполнены в виде установленных на валах и на ступицах рычагов пар зубчатых колес с передаточным отношением 1:1.
В центробежно-силовом движителе по первому и второму вариантам ведомый коленвал может быть ведущим коленвалом для последующего аналогичного центробежно-силового движителя.
Центробежно-силовой движитель по первому и второму вариантам может быть снабжен накопителями потенциальной энергии, выполненными в виде упругих элементов, установленных в корпусе, по крайней мере, по одному в каждом из двух направлений возвратно-поступательного перемещения каретки, при этом продольные оси накопителей расположены на линии суммарной центробежной силы грузов.
Накопители потенциальной энергии могут быть выполнены в виде пружин или в виде пневмоцилиндров.
В одном движители один из накопителей может быть выполнен в виде пружины, а другой в виде пневмоцилиндра.
Предлагаемые движители образуют два противоположных направления с одинаковой центробежной тяговой силой в отличие от известных центробежно-силовых движителей, где получают только однонаправленную центробежную тяговую силу.
Поэтому предлагаемые движители могут быть использованы на любом виде транспорта в т.ч. и общественного, что позволяет перевести этот транспорт на питание от аккумуляторов, а более энергоемкий транспорт на питание от электродвигателей, запитанных от генераторов на борту. Движители могут быть использованы на перемещающихся устройствах строительного и сельскохозяйственного назначения.
Конструкции предлагаемых движителей являются простыми по своей кинематике, обеспечивающими высокий КПД и надежность устройства.
Отечественная промышленность располагает всеми средствами (материалами, оборудованием), необходимыми для изготовления предлагаемых центробежно-силовых движителей и их использования в промышленности.
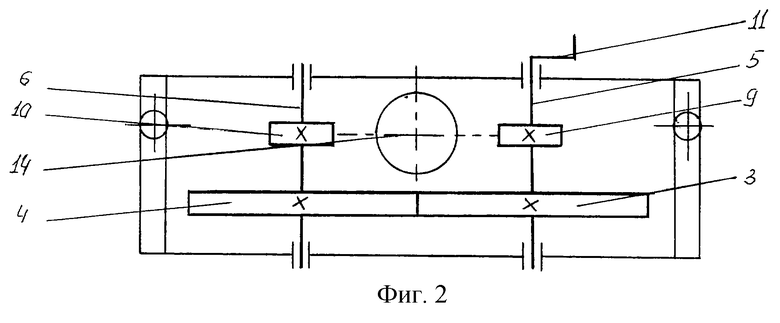
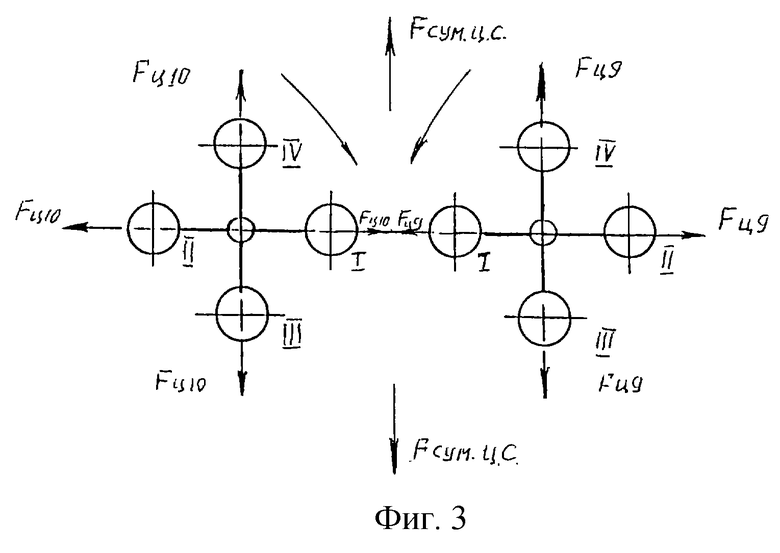
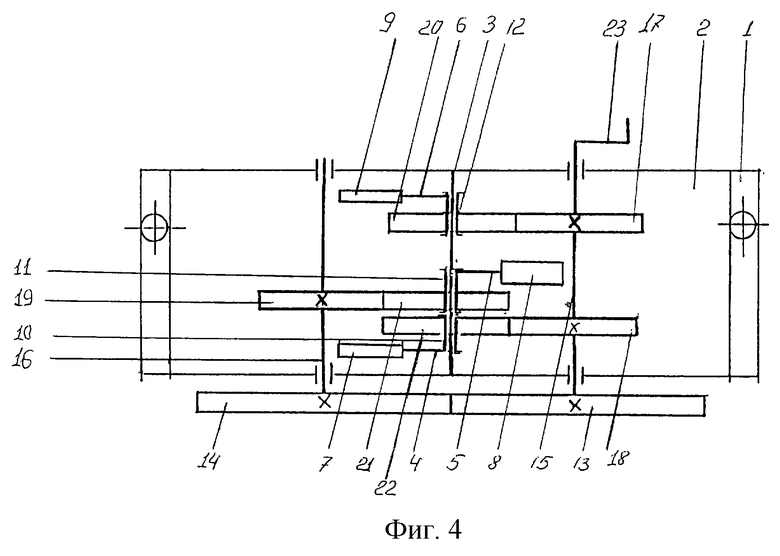
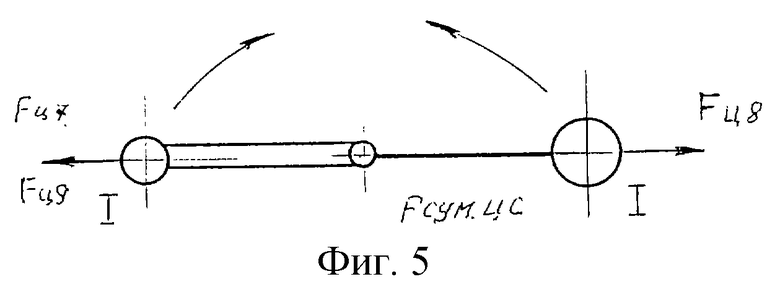
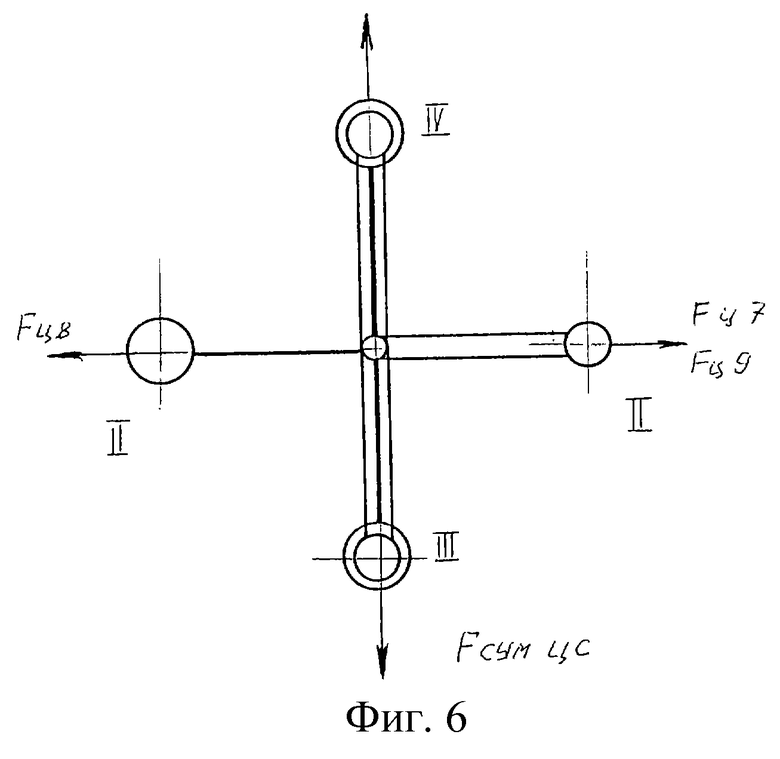
Сущность предлагаемых технических решений (первый и второй варианты движителей) поясняется чертежами, где: на фиг.1 изображен общий вид движителя (вид сверху) по первому варианту; на фиг.2 - вид по А-А на фиг.1; на фиг. 3 - схема промежуточных положений за один оборот грузов и возбуждаемые ими центробежные силы по первому варианту; на фиг.4 изображен общий вид движителя (в разрезе) по второму варианту; на фиг.5,6 - схемы промежуточных положений за один оборот грузов и возбуждаемые ими центробежные силы по второму варианту.
Центробежно-силовой движитель по первому варианту содержит корпус 1, на котором подвижно смонтирована каретка 2 с возможностью возвратно-поступательного перемещения вдоль продольной оси ее. На каретке 2 перпендикулярно ее перемещению установлены симметрично ее продольной оси параллельные и кинематически связанные посредством, например, пары цилиндрических зубчатых колес 3 и 4 с передаточным отношением 1:1 валы 5 и 6, на которых жестко в одной плоскости смонтированы расчетной одинаковой длины рычаги 7 и 8 с рабочими грузами 9 и 10 одинакового расчетного веса (массы) для создания тягового усилия за счет центробежной силы, возникающей при синхронном противоположном направлении вращения грузов. Привод вала 5 осуществляется от коленвала (на чертеже не показан) например, посредством кривотпипно-шатунного механизма, включающего кривошип 11, установленный жестко на валу 5, шарнирно соединенный с шатуном 12, который шарнирно соединен со штоком 13. Шток 13, установленный в корпусе 1 движителя параллельно линии суммарной центробежной силы, находится в одной плоскости с осью вала 5 и взаимосвязан с коленвалом (не показан). Один из валов 5 или 6 может быть снабжен жестко установленным на валу одним из элементов кинематики для карданного, ременного или цепного привода. Каретка 2 снабжена средством для взаимосвязи ее с ведомым коленвалом, выполненным, например, в виде пальца 14, расположенного в плоскости вращения грузов на линии направления суммарной центробежной силы грузов и соединенным непосредственно с шатуном 15 ведомого коленвала или, например, как на фиг. 1 со штоком 16, установленным в корпусе 1, который посредством такого же пальца 14 соединен с шатуном 15 ведомого коленвала (не показан).
Движитель может быть снабжен накопителями потенциальной энергии, выполненными в виде упругих элементов, например, в виде пружин сжатия 17 или в виде пневмопилиндров 18. Накопители установлены в корпусе 1, по крайней мере, по одному в каждом из двух направлений перемещения каретки и продольные оси накопителей расположены на линии суммарной центробежной силы.
Предлагаемый движитель работает следующим образом:
От двигателя через приводной коленвал (не показаны), шток 13, шатун 12, кривошип 11 вращение передается валу 5. Далее через зубчатые колеса 3, 4 вращение передается в противоположную сторону валу 6. Грузы 9 и 10 синхронно вращаются в противоположные стороны. При осуществлении полного оборота грузы 9 и 10 дважды оказываются на одной линии, проходящей через оси валов 5 и 6, при этом они приближены друг другу (положение I на фиг.3) или отдалены друг от друга (положение II на фиг.3). Это "мертвые" точки. В этих положениях суммарная центробежная сила грузов равна нулю, т.к. центробежные силы грузов уравновешены: направлены навстречу друг другу или в противоположные стороны. В "мертвых" точках суммарная центробежная сила грузов меняет свое направление на противоположное. При проекции центробежных сил грузов 9 и 10 при переходе их от "мертвых" точек до положения III на фиг.3 (нижнее положение) или положение IV на фиг.3 (верхнее положение) на горизонтальные и вертикальные оси оказывается, что горизонтальные составляющие центробежных сил уравновешиваются, а вертикальные составляющие суммируются и создают общую центробежную силу, которая растет от нуля до максимума. Суммарная центробежная сила в этих положениях (III и IV) оказывается максимальной. За один оборот суммарная центробежная сила грузов попеременно действуя то в одном, то в противоположном направлениях, осуществляет возвратно-поступательное перемещение каретки 2.
Но движение каретки 2 осуществляется и от силы воздействия накопителей потенциальной энергии. При движении каретка 2 воздействует на упругие элементы: пружины сжатия 17 или пневмоцилиндры 18 (накопители потенциальной энергии), поочередно сжимая их при движении ее в одну, а потом в противоположную стороны. В результате оказывается, что когда каретка 2 воздействует на один накопитель 18, на нее воздействует потенциальной энергией (пружина разжимается) другой накопитель 17. При своем движении в ту или другую сторону каретка 2 совершает работу, осуществляя через шток 16, шатун 15 вращение ведомого коленвала (не показан).
Центробежно-силовой движитель по второму варианту содержит корпус 1, на котором подвижно смонтирована каретка 2 с возможностью возвратно-поступательного перемещения вдоль продольной оси ее. На каретке 2 перпендикулярно ее перемещению неподвижно смонтирована ось 3 с подвижно вращательно установленными рычагами 4, 5, 6 расчетной длины с грузами 7, 8, 9 для создания тягового усилия за счет центробежной силы, возникающей при синхронном противоположном направлении вращения грузов (груз 7 и 9 вращается в одну сторону, а груз 8 в противоположную). При этом крайние грузы 7 и 9, установленные в одной плоскости, проходящей через ось 3, развернуты относительно среднего груза на 180o, имеют одинаковую массу в сумме, равную массе груза 8, расположенного посередине. Рычаги 4, 5, 6 снабжены ступицами 10, 11, 12, а привод (не показан) снабжен параллельными и кинематически связанными посредством пары цилиндрических зубчатых колес 13 и 14 с передаточным отношением 1:1 валами 15 и 16, на которых жестко смонтированы цилиндрические зубчатые колеса 17 и 18 на валу 15, а колесо 19 - на валу 16. Валы 15 и 16 расположены параллельно оси 3. На ступицах 10, 11, 12 установлены цилиндрические зубчатые колеса 20, 21, 22 для кинематической связи с валами 15 и 16. При этом пары зубчатых колес 20 и 17, а также 22 и 18 обеспечивают вращение грузов 7 и 9 в одну сторону, а пара зубчатых колес 19 и 21 обеспечивает вращение груза 8 в противоположную сторону. Передаточные отношения пар зубчатых колес 17 и 20, 19 и 21, 18 и 22 взяты 1:1. Привод вала 15 осуществляется от коленвала (не показан), например, посредством кривошипно-шатунного механизма, включающего кривошип 23, установленный жестко на валу 15 (остальные элементы привода не показаны, но привод аналогичен приводу по первому варианту). Один из валов 15 или 16 может быть снабжен жестко установленным на валу одним из элементов кинематики для карданного, ременного или цепного привода. Каретка 2 снабжена средством для взаимосвязи ее с ведомым коленвалом, аналогично схеме по первому варианту.
Движитель по второму варианту может быть так же как и по первому варианту снабжен накопителями потенциальной энергии (не показано). Форма выполнения, расположение и работа накопителей аналогичны накопителям по первому варианту.
Предлагаемый движитель по второму варианту работает следующим образом. От двигателя через приводной коленвал кривошипно-шатунный механизм (не показаны), вращение через кривошип 23 передается валу 15. Далее через зубчатые колеса 13, 14 вращение передается в противоположную сторону валу 16. От вала 15 через пары зубчатых колес 17-20 и 18-22 вращение в одну сторону передается грузам 9 и 7. От вала 16 через пару зубчатых колес 19-21 вращение в противоположную сторону передается грузу 8. Грузы (7-9) и (8) синхронно вращаются в противоположные стороны. При осуществлении полного оборота грузы 7, 8 и 9 дважды оказываются на одной линии по разные стороны: грузы 7-9 - по одну сторону, груз 8 - по другую сторону от оси 3 (положение I - на фиг.5 и положение II - на фиг.6). Это - "мертвые" точки. В этих положениях центробежные силы грузов направлены в противоположные стороны и суммарная центробежная сила грузов равна нулю. В "мертвых" точках суммарная центробежная сила грузов меняет свое направление на противоположное. Как и в движителе по первому варианту, при проекции центробежных сил грузов 7-9 и 8 при переходе их от "мертвых" точек до положения III на фиг.6 (нижнее положение) или положение IV на фиг.6 (верхнее положение) на горизонтальную и вертикальную оси оказывается, что горизонтальные составляющие центробежных сил уравновешиваются, а вертикальные составляющие суммируются и создают общую центробежную силу, которая растет от нуля до максимума. Суммарная центробежная сила в этих положениях (III и IV) оказывается максимальной. За один оборот суммарная центробежная сила грузов, попеременно действуя то в одном, то в противоположном направлениях, осуществляет возвратно-поступательное перемещение каретки 2. Но движение каретки 2 осуществляется и от силы воздействия накопителей потенциальной энергии, работа которых при взаимодействии с кареткой 2 представлена в разделе "Работа движителя по первому варианту".
При двухступенчатой схеме работы предлагаемых вариантов движителей ведомый коленвал может быть ведущим коленвалом для аналогичных центробежно-силовых движителей. Двухступенчатые схемы установок могут быть следующие. Один вариант: двигатель (1)- движитель (1) - движитель (2) - генератор - нагрузка (-двигатель). Вторая ступень начинается с ведомого коленвала движителя (1), который для второй ступени является приводным. Другой вариант двухступенчатой схемы: двигатель (1) - движитель (1) - генератор (1) - двигатель (2) - движитель (2) - генератор (2) - нагрузка. Мощность второй ступени можно увеличить до соответствия энергии, равной экономии ее на первой ступени. В двухступенчатых схемах экономия энергии растет в геометрической прогрессии.
Авторами в домашних условиях был изготовлен опытный образец (модель) предлагаемого движителя. Были проведены испытания, которые показали работоспособность предлагаемой конструкции и подтвердили получение тягового усилия в соответствии с приведенными ниже расчетными данными.
Расчет центробежной силы: F=m•Vл2/Rвр Н
1. Два рабочих груза общей массой: m=0,2468 кг; Rвр.ц.т.=0,045 м; n=8,2 об/с, где Rвр.ц.т. - радиус вращения центра тяжести грузов.
Длина одного круга вращения центра тяжести грузов: l=n•D=3,14•0,09= 0,2826 м; скорость линейная Vл=1•n=0,2826•8,2=2,317 м/с;
F=0,2468•(2,317)2/0,045=29,4 Н.
2. Два рычага (держатели грузов) общей массой: m=0,0465 кг; R вр.ц.т.= 0,025 м; n=8,2 об/с; l=3,14•0,05=0,157м; Vл= 0,157•8,2=1,2874 м/с;
F=0,0465•(1,2874)2/0,025=3,084 Н;
Fобщ.=29,4+3,084=32,484 H.
Работа, затрачиваемая на сжатие пружины в одну секунду-мощность (Р); Р= работа/время; Ватт= Дж/с. Для определения силы сжатия пружины (накопитель потенциальной энергии) движитель был закреплен за корпус в вертикальном положении (т. е. учитывался вес каретки). Сжатие производилось из нейтрального положения каретки до перехода ее в мертвую точку (т.н. конечная точка сжатия пружины). Под действием силы тяжести, приложенной к каретке, весом 25,47 кг•9,81=249,86 H, каретка прошла путь S=0,02 м до мертвой точки коленвала.
Работа на деформацию пружины Wд=Fср•S=(Д•S)/2•S, где средняя сила F= Д•S/2; Д - жесткость пружины; Wд=(249,86H/2)•0,02 м=2,4986 Дж; Р=2,4986•16,4 об/с=40,977 Дж/с (См. Х.Кухлинг "Справочник по физике", М., Мир, 1982 г., с. 80).
Грузы совершают 492 об/мин=8,2об/с. За один оборот рабочих грузов каретка сделает одно возвратно-поступательное движение и в каждом из этих двух направлений она по одному разу сожмет пружины-накопители, т.е. 8,2•2=16,4 сжатий в одну секунду.
Работа на ускорение каретки сжатой пружиной: W=F•S, где F=124,93 H - среднее значение максимальной силы F= 249,86 H; S=0,08 м (Каждая пружина сжимается на 0,02 м, за 1 оборот будет пройден общий путь -0,08); W= 124,93•0,08=10 Дж.
Работа за одну секунду Р=10•8,2 об/с=82 Дж/с.
Работа на ускорение каретки от центробежной силы грузов: F=16,242 H - среднее значение силы грузов максимальной силы 32,484; S=0,08 м - путь каретки за один оборот грузов; W=16,242•0,08=1,3 Дж. Работа за одну секунду Р= 1,3•8,2 об/с=10,66 Дж/с.
Общая мощность: 82+21,32=103,32 Дж/с;
Полезная мощность: 103,32-40,977=62,343 Дж/с.
Потребление тока электродвигателем:
Двигатель АВЕ-042-4МУЗ; W=18 В•А; nн=1500 об/мин; соединение обмоток Δ, U - 220 В, cosϕ не указан.
1. В работе коленвал без пружин: ток I=(0,171 -0,173)А, n=472 oб/м.
2. В работе коленвал и все пружины: ток I=(0,1664-0,1666)А; n=492 об/мин.
3. Каретка неподвижна, грузы вращаются: ток I=0,1566А; n=(498-500) об/мин.
4. Потребление тока двигателем при его холостом ходе: ток I=(0,1558-0,1561)А; Iср.=0,1559А; n=500 об/мин.
В результате анализа установлено:
1. В работе пружины и коленвал: ток I=0,1665А; n=492 об/мин=8,2 об/с.
2. Все как в п. 1, но каретка неподвижна: ток I=0,1566А; n=(498-500) об/мин.
3. Холостой ход двигателя: ток I=0,15595 А.
При сравнении п.2 и 3, l=0,1566-0,15595=0,00065 А, откуда видно, что ток при вращающихся грузах почти не отличается от тока холостого хода двигателя и он значительно меньше силы трения вращающихся грузов, т.е. момент инерции грузов незначителен.
Поскольку КПД и cosϕ в паспорте не указан, cosϕ определяется по формуле P=U•I•cosϕ; cosϕ=U•I/P=220•0,1665/18=0,49; cosϕ=0,49.
При сравнении п.1 и 3: ток I=0,1665-0,15595=0,0106 А; Р=220•0,0106•0,49= 1,143 Вт. Это мощность, затрачиваемая двигателем (Рдв) на произведенную кареткой работы, вызванную центробежной силой и силой потенциальной энергией накопителей.
Общая мощность, затраченная на ускорение каретки от центробежной силой грузов и от потенциальной энергией накопителей:
Робщ=10,66+81,95=92,61 Дж/с.
Свободная мощность Рсв.=92,61-40,977=51,63 Дж/с.
Рп= 40,977 Дж/с - мощность, затраченная на накопление потенциальной энергии. Свободная мощность Рсв=63 Дж/с передается кареткой на ведомый коленвал и далее на вал нагрузки. На образование этой мощности двигатель затратил мощность Рдв= 1,143 Вт, что дает экономию энергии в 51,63:1,143= 45,1. При увеличении емкости потенциальных накопителей энергии в два раза и изменении доли центробежной силы грузов к доле силы накопителей эта экономия энергии составит около двух порядков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ИЗМЕНЯЕМОЙ СТЕПЕНЬЮ СЖАТИЯ | 2013 |
|
RU2525372C1 |
| ЛЕБЕДКА (ВАРИАНТЫ) | 1996 |
|
RU2136577C1 |
| НИЗКОШУМНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2219399C2 |
| Колесное транспортное средство с электрической системой управления | 2022 |
|
RU2782011C2 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ | 2017 |
|
RU2664853C1 |
| МОТОРАМА ТРАНСПОРТНОГО СРЕДСТВА И ЕЕ ПРИМЕНЕНИЕ | 2020 |
|
RU2741670C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2013217C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ПРОСТРАНСТВЕ | 2009 |
|
RU2411139C1 |
| ТЕРМОГЕНЕРАТОР | 2007 |
|
RU2355911C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С СИЛОВОЙ УСТАНОВКОЙ. | 2014 |
|
RU2576854C2 |
Изобретение относится к самоходным транспортным средствам. По первому варианту движитель содержит корпус, пару рычагов расчетной длины с жестко прикрепленными грузами для создания тяги за счет центробежных сил, привод рычагов. Рычаги с грузами установлены жестко в одной плоскости на параллельных, кинематически связанных валах, установленных на каретке, симметрично относительно продольной оси каретки, смонтированной на корпусе с возможностью возвратно-поступательного перемещения вдоль ее продольной оси в плоскости, перпендикулярной валам. Каретка снабжена средством, расположенным в плоскости вращения грузов на линии действия суммарной центробежной силы грузов, для взаимосвязи с ведомым коленвалом. По второму варианту движитель имеет рычаги со ступицами. Привод снабжен зубчатыми колесами и параллельными кинематически связанными между собой двумя валами, установленными на каретке параллельно оси. Кинематические связи между валами и между валами и осью выполнены в виде установленных на валах и на ступицах рычагов пар зубчатых колес с передаточным отношением 1:1. Предусмотрены накопители патенциальной энергии в виде пружин или в виде пневмоцилиндров. Изобретение направлено на повышение КПД преобразования мощности привода в тяговое усилие. 2 c. и 10 з. п. ф-лы, 6 ил.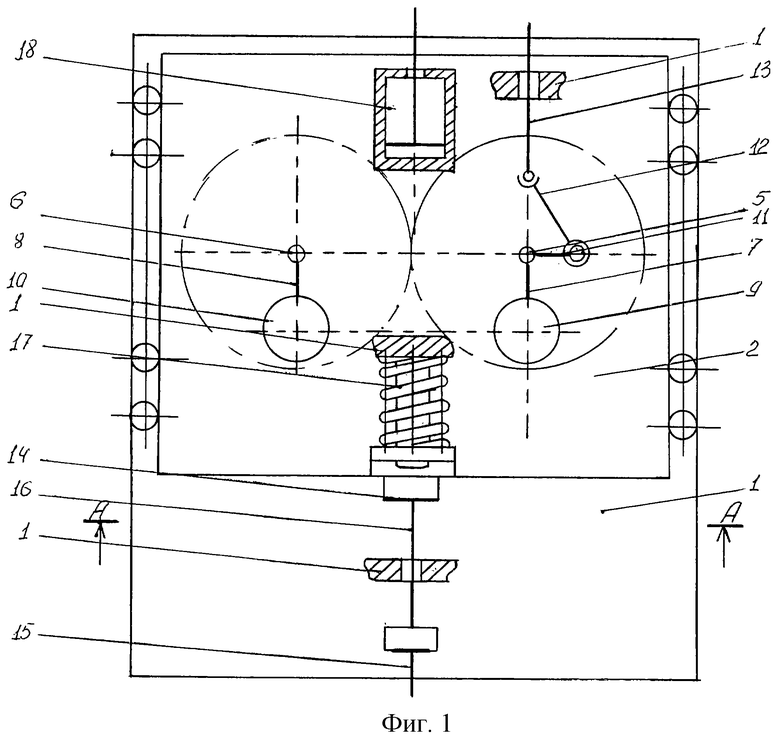
| ЦЕНТРОБЕЖНО-СИЛОВОЙ ДВИЖИТЕЛЬ | 1994 |
|
RU2095625C1 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2078996C1 |
| RU 2051832 C1, 10.01.1996 | |||
| US 3897692 A, 05.08.1975. | |||

