Область техники, к которой относится изобретение.
Изобретение относится к транспортным средствам, в которых используется преобразование вращательного движения в поступательное и дополнительно используется работа гравитационных сил.
Уровень техники.
Известны инерционные движители, действие которых основано на вращении дебалансов с изменяющейся в течение одного оборота угловой скоростью, за счет чего образуется разность моментов центробежных сил, которая создает тяговую силу в направлении большего момента силы.
Известен движитель транспортного средства, содержащий корпус, установленные в нем валы, на которых подвижно установлены маховики (дебалансы), и механизмы вращения маховиков вокруг валов. Движитель выполнен из двух связанных между собой и симметрично расположенных одинаковых частей, в каждой из которых маховики содержат рамную конструкцию, а валы выполнены коленчатыми. Механизм вращения маховиков вокруг коленчатых валов состоит из подвижно установленных на боковых частях валов барабанов и колесной пары. Колесная пара связана зубчатой передачей с соответствующим барабаном и соединена с двигателем. Барабаны выполнены в виде двух зубчатых колес, соединенных боковыми стержнями (см. патент РФ 2392165, кл. B62D 57/02, кл. F03G 3/08). За счет конструкции барабанов, передающих вращение на маховики с изменением точек приложения усилия за один период вращения, угловая скорость маховиков меняется с максимальной в верхнем положении до минимальной в нижнем. Движение осуществляется из-за разницы угловых скоростей вращения маховиков и соответственно разницы центробежных сил. Указанное изобретение не позволяет добиться высокого КПД из-за того, что в каждом периоде вращения действуют противоположные направлению движения центробежные силы - в первом полупериоде действующие в направлении движения данного устройства, во втором полупериоде в направлении против его движения.
Известен также инерционный движитель, действие которого основано на вращении дебалансов с изменяющейся в течение одного оборота угловой скоростью. Движитель содержит две группы из четырех дебалансов. Каждый дебаланс установлен на ведомом валу и связан с индивидуальным приводом. Каждый механизм для вращения ведомого вала с изменяющейся в течение одного оборота угловой скоростью содержит закрепленный на приводном валу кривошип и поступательную кинематическую пару, образованную кривошипом и пазом в дебалансе. Ведомые валы с дебалансами и приводные валы установлены в отдельных корпусах. В каждой группе дебалансы попарно развернуты друг относительно друга на 180°, а относительно дебалансов другой группы на 90°. Соседние ведомые валы вращаются во взаимно противоположных направлениях. Приводные валы связаны между собой парами одинаковых зубчатых колес (см. патент РФ 2097600, кл. F03G /00, кл. В06В 1/16). Принцип создания тяговой силы аналогичен. Вращающиеся с постоянной скоростью кривошипы прикладывают усилия к дебалансам в течение одного оборота на разных расстояниях, плавно меняя их угловую скорость. Наличие большого числа дебалансов со смещением каждой группы на 90° позволяет достичь большей плавности хода, но не позволяет достичь высокий КПД, опять же в силу того, что в каждом периоде вращения каждый из дебалансов полпериода работает против движения устройства. Кроме того, конструкция достаточно сложна из-за наличия большой группы дебалансов и требует дополнительной конструкции для непосредственного перемещения движителя по поверхности движения.
Целью настоящего изобретения является создание компактного транспортного средства с повышенным КПД за счет того, что сам корпус инерционного движителя является элементом качения по поверхности, а движение создается непрерывным вращением дебалансов, центробежные силы которых в первом полупериоде вращения направлены на горизонтальное перемещение движителя, а во втором полупериоде служат для приращение его потенциальной энергии за счет поднятия центра масс внутреннего цилиндра корпуса движителя, что в следующем полупериоде возвращается в виде кинетической энергии движения.
Раскрытие сущности изобретения.
Поставленная цель достигается тем, что в инерционном движителе, содержащем корпус, установленные в нем ведомые валы с закрепленным на каждом из них дебалансом, вращаемые во взаимно противоположных направлениях, и механизмы для вращения ведомых валов, при этом дебалансы развернуты на 180°, согласно изобретению дебалансы вращаются соосно в вертикальной плоскости с постоянной угловой скоростью, а корпус состоит из двух цилиндров - внутреннего и внешнего, с возможностью соосного вращения внешнего цилиндра относительно внутреннего в одну сторону по ходу движения инерционного движителя, при этом вращение в противоположную сторону ограничивается механизмом стопорения, а внутренний цилиндр представляет собой дебаланс со смещенным центром масс по вертикали от оси симметрии за счет расположения в его нижней части двигателей, механизмов для вращения ведомых валов, конструктивных элементов их крепления и дебалансных грузов. Заявляемый инерционный движитель позволяет повысить КПД и, благодаря упрощению конструкции, достигается его компактность.
Краткое описание чертежей:
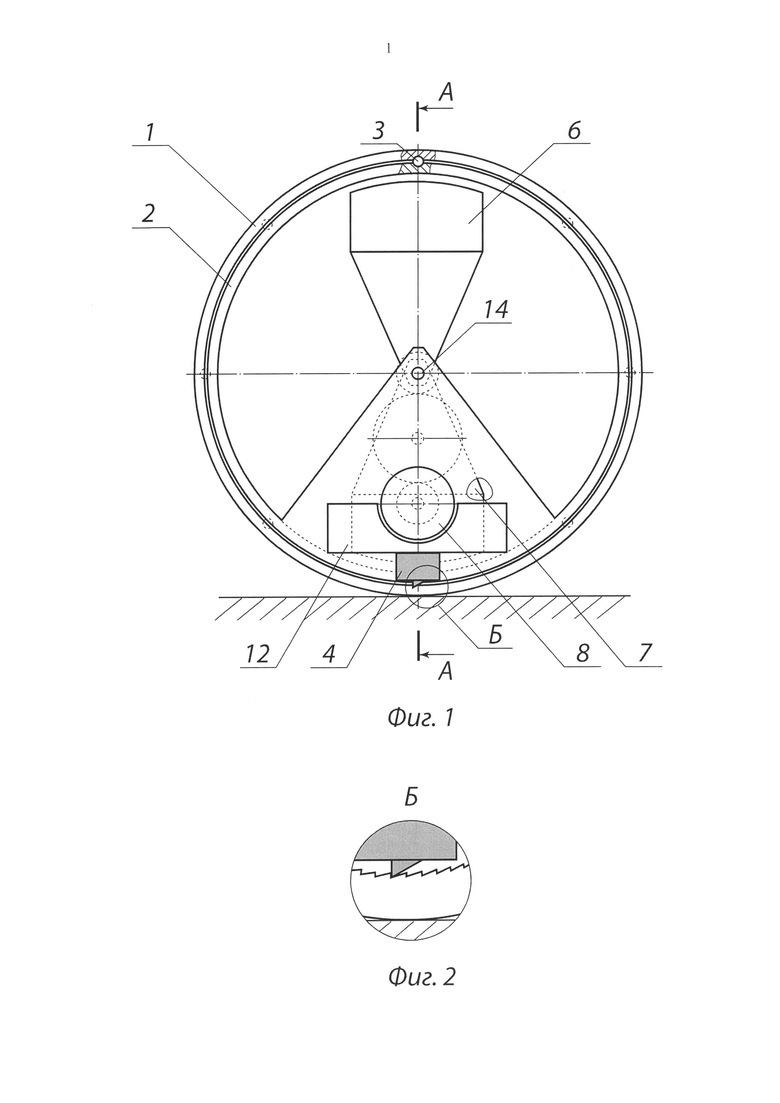
Фиг. 1. Общий вид движителя.
Фиг. 2. Механизм стопорения.
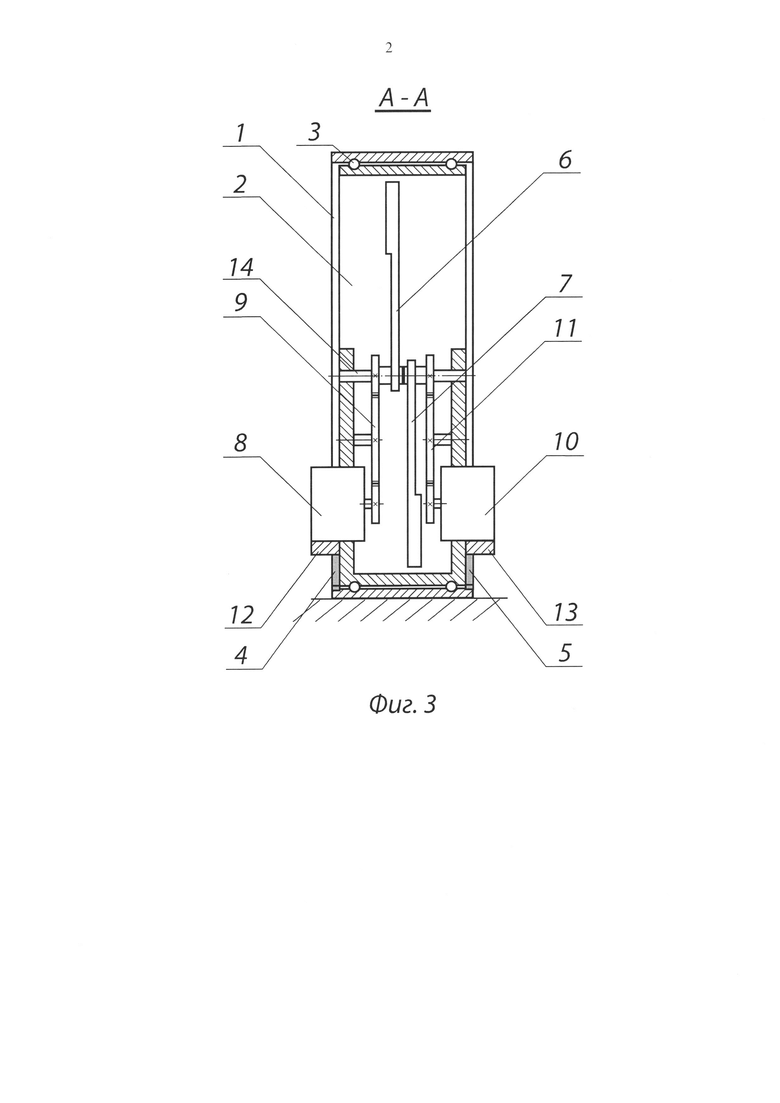
Фиг. 3. Частичный разрез движителя по линии А-А.
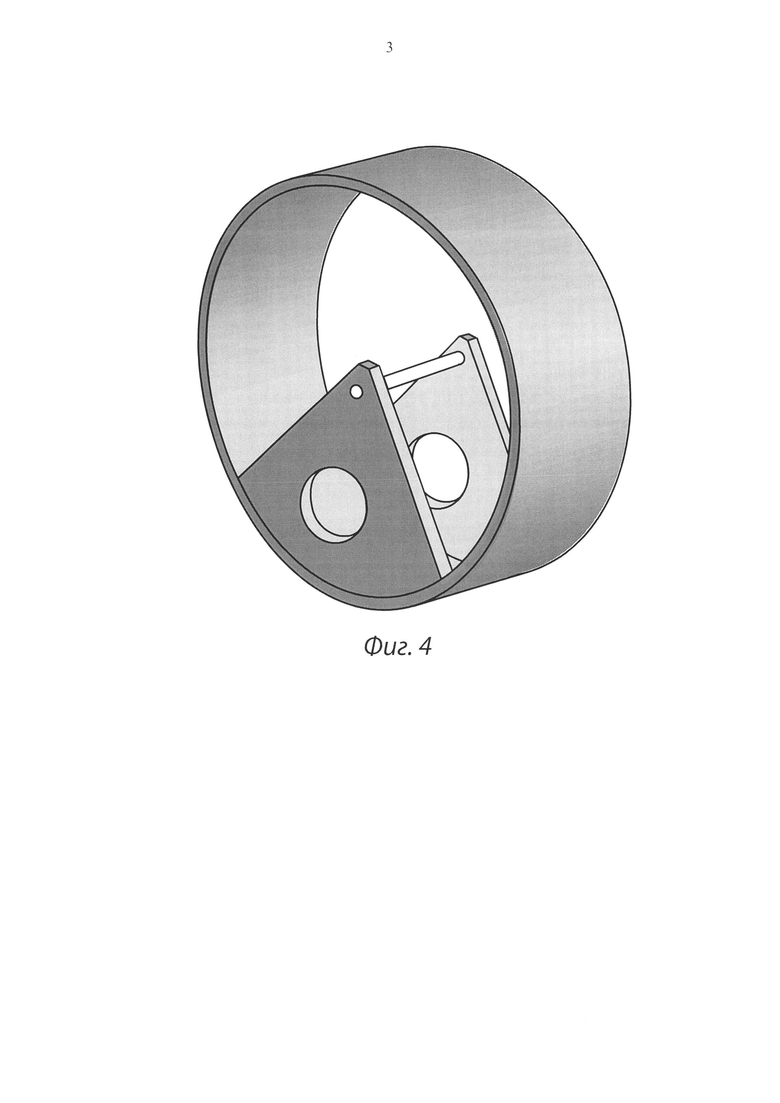
Фиг. 4. Изометрическая проекция внутреннего цилиндра.
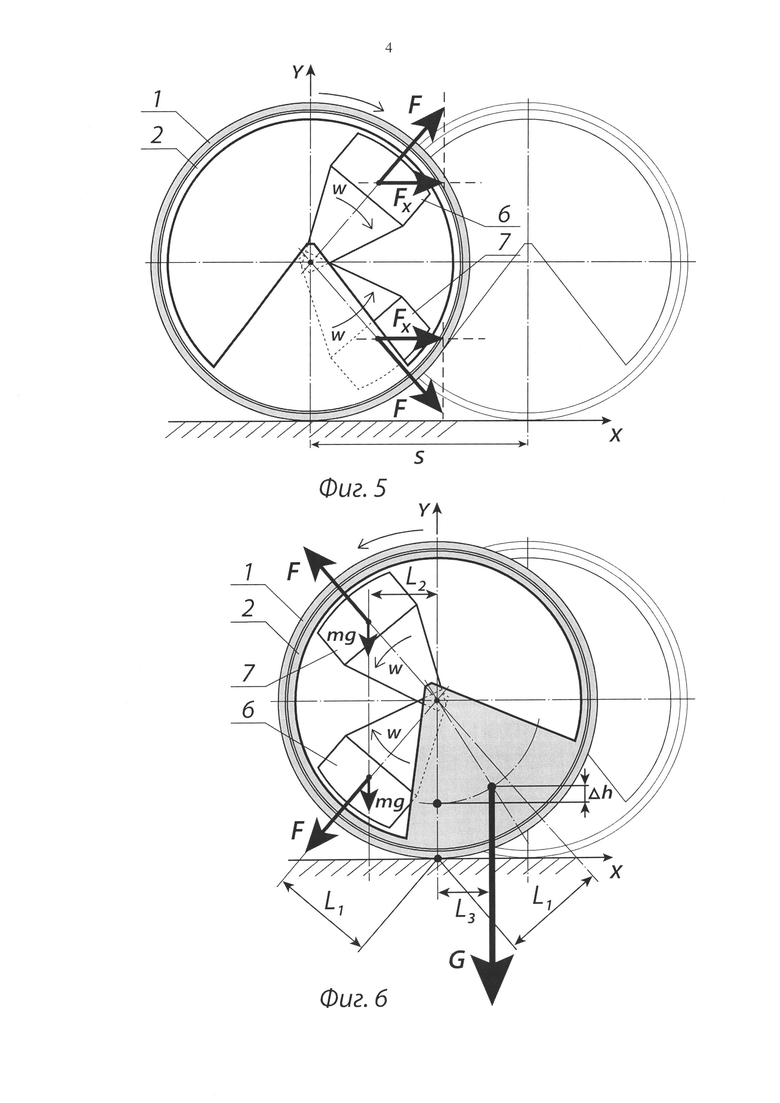
Фиг. 5. Схема сил, действующая в первом полупериоде движения.
Фиг. 6. Схема сил, действующая во втором полупериоде движения.
Заявляемый инерционный движитель содержит корпус, состоящий из внешнего цилиндра 1, вращающегося по внешней поверхности внутреннего цилиндра 2, благодаря элементам качения 3. Вращение внешнего цилиндра свободно осуществляется в одну сторону по ходу движения инерционного движителя. В противоположную сторону оно ограничено механизмами стопорения 4, 5. Во внутреннем цилиндре размещаются следующие элементы: два дебаланса 6, 7, установленные на одной оси, совпадающей с общей геометрической осью цилиндров, и развернутые друг относительно друга на 180°; двигатель 8, передающий вращение дебалансу 6 через механизм вращения ведомого вала 9, двигатель 10, передающий вращение дебалансу 7 через механизм вращения ведомого вала 11; дебалансные грузы 12, 13; общая ось 14. Форма внутреннего цилиндра изображена на фиг. 4. Благодаря такой конструкции внутреннего цилиндра, а также расположению в нем двигателей, механизмов вращения и дебалансных грузов, его центр масс расположен ниже геометрической оси, совпадающей с осью 14.
Осуществление изобретения
Заявляемый инерционный движитель осуществляет работу следующим образом. Двигатели 8, 10 передают крутящий момент через механизмы вращения ведомых валов 9, 11 на дебалансы 6, 7, изображенные на фиг. 5 и фиг. 6, которые начинают вращаться на оси 14 с постоянной угловой скоростью w синхронно в противоположных направлениях. На каждый дебаланс при вращении действует центробежная сила F:
F=mw2R,
где m - масса дебаланса,
w - угловая скорость его вращения,
R - радиус вращения, то есть расстояние от оси вращения до центра масс дебаланса.
Проекция силы F на ось Y взаимно уравновешиваются, так как направлены противоположно друг другу, а в проекции на ось X удваиваются, так как направлены в одну сторону. Схема сил представлена на фиг. 5. В первом полупериоде вращения дебалансов проекция центробежных сил Fx действует в направлении оси X. Так как внешний цилиндр 1 свободно вращается по поверхности внутреннего цилиндра 2 по ходу движения, то инерционный движитель осуществляет перемещение на расстояние S за счет качения внешнего цилиндра по опорной поверхности. Работа центробежных сил А при этом определяется по формуле:
 или A=2FxcpS,
или A=2FxcpS,
где Fxcp - проекция средней центробежной силы за полупериод вращения дебалансов,
S - расстояние, на которое переместился движитель.
Во втором полупериоде вращения дебалансов 6, 7 центробежные силы F направлены в противоположную от направления движения сторону. Если бы внешний цилиндр 1 свободно вращался в обе стороны по поверхности внутреннего цилиндра 2, то инерционный движитель, благодаря полной симметрии действующих на него сил совершил бы в обратном направлении то же самое перемещение S, а движитель совершал возвратно-поступательные движения относительно начальной точки движения. В данной конструкции вращение внешнего цилиндра в противоположную от направления движения сторону ограничивается механизмом стопорения 4. Поэтому во втором полупериоде работа центробежных сил дебалансов 6, 7 направлена не на перемещение движителя в противоположную сторону, а на преодоление момента гравитационной силы, действующей на внутренний цилиндр 2.
Схема действующих сил представлена на фиг. 6.
Поскольку во втором полупериоде внешний цилиндр 1 застопорен относительно внутреннего цилиндра 2, то центробежные силы, действующие на дебалансы 6, 7, совершают работу по повороту всей конструкции относительно точки опоры внешнего цилиндра по опорной поверхности. Пока моменты центробежных сил, а также сил тяжести, действующих на дебалансы 6,7 больше момента силы тяжести, действующего на внутренний цилиндр 2, который представляет собой дебаланс, вся конструкция проворачивается на некоторый угол, но как только моменты уравновешиваются, поворот заканчивается.
GL3=2FL1+2mgL2,
G=Mg
где G - сила тяжести, действующая на внутренний цилиндр,
М - масса внутреннего цилиндра,
m - масса дебаланса,
g - ускорение свободного падения,
L1 - плечо центробежной силы,
L2 - плечо силы тяжести, действующей на дебаланс,
L3 - плечо силы тяжести, действующей на внутренний цилиндр
В результате поворота всей конструкции движителя относительно точки опоры, центр масс внутреннего цилиндра 2 повышается на высоту Δh.
Работа центробежных сил во втором полупериоде затрачена на накопление потенциальной энергии движителя:
E=MgΔh,
где Е - накопленная за второй полупериод потенциальная энергия,
g - ускорение свободного падения,
Δh - высота, на которую был поднят центр масс внутреннего цилиндра,
М - масса внутреннего цилиндра.
Как только момент силы тяжести, действующий на внутренний цилиндр 2 становится больше моментов сил, действующих на дебалансы 6, 7, начинается поворот всей конструкции движителя относительно точки опоры в сторону движения по оси X, а накопленная потенциальная энергия Е, согласно закону сохранения энергии, начинает переходить в кинетическую энергию К:
Е=К,
где Md - масса инерционного движителя,
Vx - скорость в направлении оси X.
В каждом полупериоде описанные процессы повторяются.
Таким образом, заявляемый инерционный движитель, в первом полупериоде вращения дебалансов совершает поступательное движение, а во втором периоде накапливает энергию вращения дебалансов в виде потенциальной энергии, затем переходящую в кинетическую энергию поступательного движения. Благодаря накоплению энергии в каждом втором полупериоде вращения дебалансов повышается КПД движителя. Кроме того, благодаря упрощению конструкции, достигается компактность заявляемого инерционного движителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ПРИВОД ВРАЩЕНИЯ | 2012 |
|
RU2552765C2 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2604908C2 |
| СПОСОБ РАБОТЫ СИЛОВОГО ПРИВОДА ВРАЩЕНИЯ И ЭЛЕКТРОСТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377458C2 |
| СПОСОБ УВЕЛИЧЕНИЯ СКОРОСТИ ИНЕРЦИОННОГО ПРИВОДА ВРАЩЕНИЯ И УСТРОЙСТВО СИЛОВОГО ПРИВОДА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2481514C1 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ | 1994 |
|
RU2097600C1 |
| ИМПУЛЬСНО-ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ (ИИД) И АГРЕГАТИРОВАННЫЙ ИМПУЛЬСНО-ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ (АИИД) ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2455187C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2392165C1 |
| СПОСОБ И УСТРОЙСТВО УРАВНОВЕШИВАНИЯ ВИБРАЦИОННЫХ НАГРУЗОК В РОТОРНЫХ МАШИНАХ | 2004 |
|
RU2282763C2 |
| ВИБРОДВИЖИТЕЛЬ | 2007 |
|
RU2348467C1 |
Изобретение относится к области машиностроения, а более конкретно к инерционным движителям. Инерционный движитель содержит корпус, установленные в нем ведомые валы с закрепленным на каждом из них дебалансом, вращаемые во взаимно противоположных направлениях, и механизмы для вращения ведомых валов. Дебалансы, развернутые на 180°, вращаются соосно в вертикальной плоскости с постоянной угловой скоростью. Корпус состоит из двух цилиндров - внутреннего и внешнего, с возможностью соосного вращения внешнего цилиндра относительно внутреннего в одну сторону по ходу движения инерционного движителя. Вращение в противоположную сторону ограничивается механизмом стопорения, а внутренний цилиндр представляет собой дебаланс со смещенным центром масс по вертикали от оси симметрии за счет расположения в его нижней части двигателей, механизмов для вращения ведомых валов, конструктивных элементов их крепления и дебалансных грузов. Достигается повышение КПД и компактность движителя. 6 ил.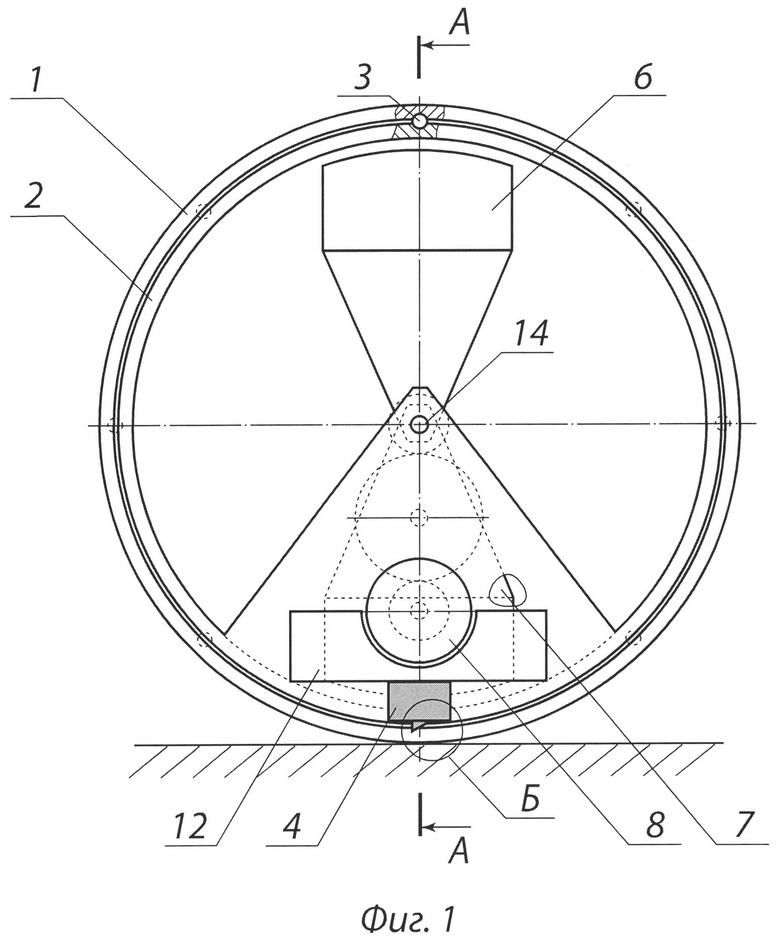
Инерционный движитель, содержащий корпус, установленные в нем ведомые валы с закрепленным на каждом из них дебалансом, вращаемые во взаимно противоположных направлениях, и механизмы для вращения ведомых валов, при этом дебалансы развернуты на 180°, отличающийся тем, что дебалансы вращаются соосно в вертикальной плоскости с постоянной угловой скоростью, а корпус состоит из двух цилиндров - внутреннего и внешнего, с возможностью соосного вращения внешнего цилиндра относительно внутреннего в одну сторону по ходу движения инерционного движителя, при этом вращение в противоположную сторону ограничивается механизмом стопорения, а внутренний цилиндр представляет собой дебаланс со смещенным центром масс по вертикали от оси симметрии за счет расположения в его нижней части двигателей, механизмов для вращения ведомых валов, конструктивных элементов их крепления и дебалансных грузов.
| US 8172017 B2, 08.05.2012 | |||
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2392165C1 |
| Способ измерения расстояний и устройство для его осуществления | 1958 |
|
SU121486A1 |
| МАШИНЕ ВЫСОКОСКОРОСТНОГО ДЕЙСТВИЯ | 0 |
|
SU167129A1 |

