Изобретение относится к регулируемому электроприводу с асинхронным двигателем, используемому в основном в механизмах с тяжелыми условиями пуска (центрифуга, штанговый нефтяной насос и т.п.), требующих плавного и бесступенчатого регулирования скорости независимо от нагрузки при работе двигателя в интервале скоростей от минимальных до максимальных при больших моментах сопротивления.
Известен способ регулирования изменением величины первичного напряжения [1]. При изменении первичного напряжения момент двигателя изменеятся пропорционально квадрату напряжения и соответственно изменяются механические характеристики.
Однако этот способ регулирования скорости в связи с пониженным КПД применяется только для двигателей малой мощности.
Известен способ управления электроприводом с асинхронным двигателем [2] . Этот способ позволяет плавно регулировать число оборотов асинхронного двигателя и получать устойчивую работу на любой скорости независимо от нагрузки. При работе двигателя на пониженных скоростях, т.е. при работе последнего на искусственной характеристике (при выведенном в цепь ротора сопротивлении), это достигается путем дополнительного питания обмотки статора асинхронного двигателя постоянным током и автоматического регулирования этого тока в зависимости от разности двух напряжений - эталонного и пропорционального току нагрузки двигателя.
Недостатком такого способа является то, что при работе на искусственной характеристике режим работы двигателя характеризуется низким КПД и наличием больших токов в обмотках. Во время работы асинхронного двигателя на естественной характеристике при закороченном роторном сопротивлении все устройство автоматически выводится из работы. Для регулирования числа оборотов асинхронного двигателя, работающего на естественной характеристике, требуется другая дополнительная аппаратура.
Известен способ регулирования двигателя [3 и 4], по которому при работе двигателя на малых частотах, т.е. малых скоростях, необходимо компенсировать падение напряжения на активном сопротивлении обмотки статора.Постоянное сопротивление, подаваемое на статор, необходимо программировать в функии частоты. Этому способу присущи недостатки предыдущего способа.
Наиболее близким к изобретению является способ регулирования частоты вращения асинхронного двигателя [5], по которому изменяют частоту подводимого к статорной обмотке переменного тока, при этом регулируется и напряжение таким образом, что отношение напряжения к частоте остается постоянным.
К недостаткам частотного регулирования можно отнести тот факт, что при малых скоростях нужно пропорционально уменьшать напряжение, подаваемое в статорную обмотку, вследствие чего момент на валу двигателя уменьшается пропорционально квадрату напряжения, т. е. при малых скоростях и больших моментах сопротивления двигатель работает неустойчиво.
Задачей, на решение которой направлен предлагаемый способ частотно-импульсного регулирования скорости вращения асинронного двигателя, является достижение следующих технических результатов: получить устойчивую работу двигателя при любой скорости независимо от нагрузки, регулировать скорость от минимальной до максимальной при номинальной мощности двигателя, увеличить КПД при малых скоростях, не требуется регулирования напряжения пропорционально изменению частоты тока (напряжение выбирается исходя из получения максимального момента и скорости, а регулирование скорости производят вниз от максимальной при неизменной величине амплитуды напряжения).
Сущность способа заключается в следующем. При неизменной величине амплитуды переменного напряжения ток, подаваемый в статорную обмотку, формируется в виде импульсов, частота которых регулируется обратно пропорционально изменению частоты тока.
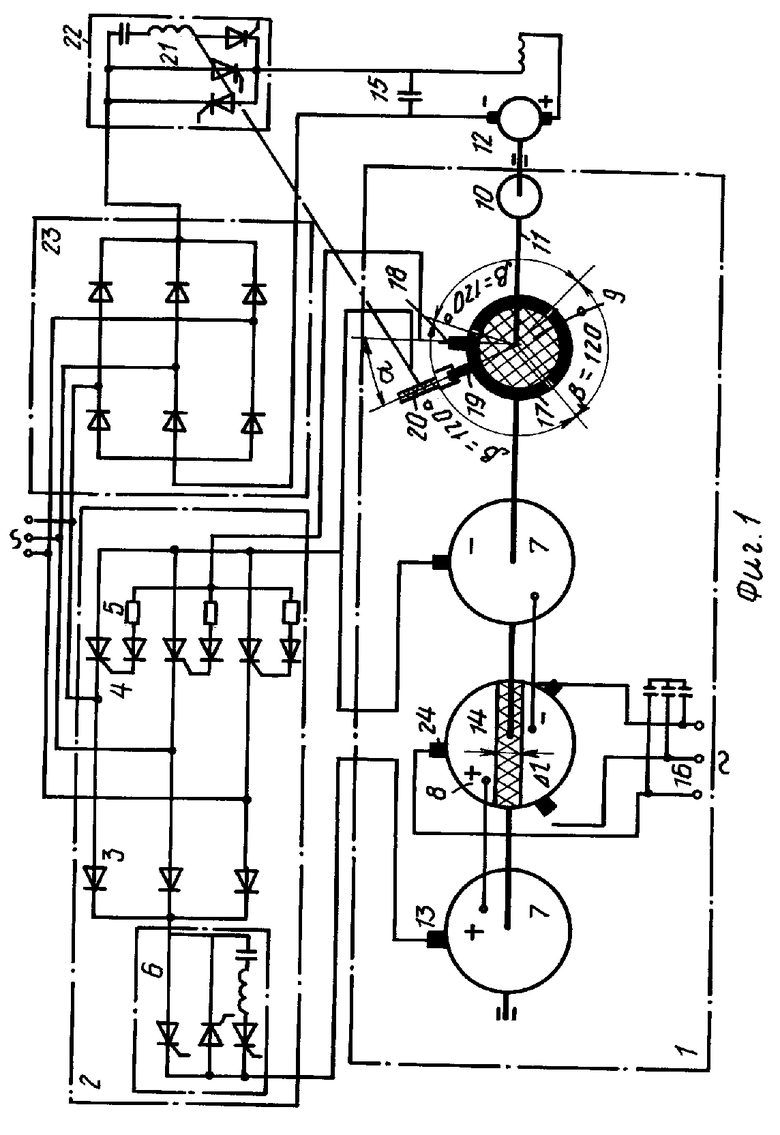
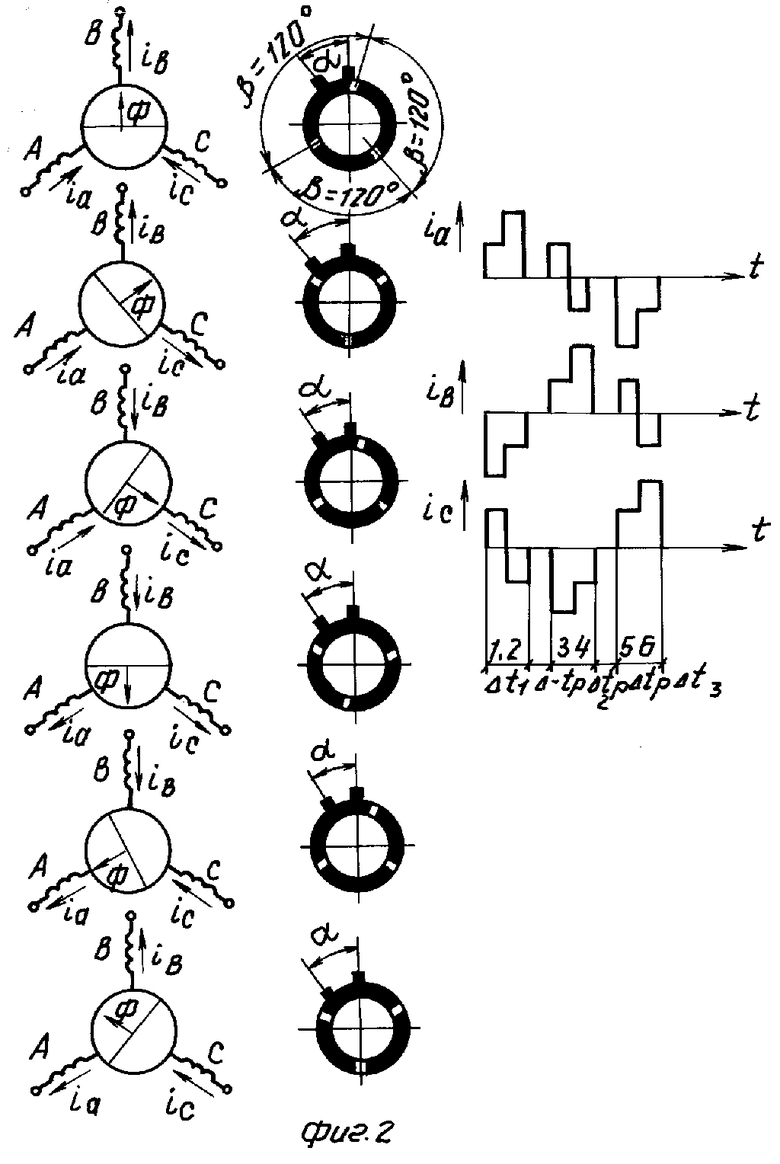
На фиг. 1 представлена принципиальная схема устройства, с помощью которого регулируется частота асинхронного двигателя; на фиг.2 - диаграмма, поясняющая работу устройства и способ регулирования частоты; на фиг.3 показано выполнение обратной связи.
Устройство содержит электромеханический коммутатор 1 и полупроводниковый выпрямитель 2 тока. Полупроводниковый выпрямитель выполнен по схеме Ларионова, подключенной к трехфазной сети переменного тока. На его выходе установлены диоды 3, а на входе - тиристоры 4 с цепью 5 управления. Выход выпрямителя 2 соединен с ограничителем 6 напряжения, выполненным в виде управляемого электрического силового ключа. Выпрямитель 2 через ограничитель 6 соединен с электромеханическим коммутатором 1, который выполнен в виде коммутационных колец 7, коллектора 8, регулятора 9 длительности импульсов, маховика 10, установленных на одном валу 11, соединенном с электродвигателем 12 постоянного тока. На коммутационных кольцах 7 установлены щетки 13, электрически соединенные с выпрямителем 2. Коллектор 8 выполнен в виде двух ламелей 14, каждая из которых электрически соединена с одним из коммутационных колец 7. На поверхности коллектора 8 установлены под углом 120о три щетки, которые электрически соединены с конденсаторной батареей 15 и клеммами 16, к которым подключается регулируемый асинхронный двигатель. Регулятор 9 длительности импульсов выполнен в виде коллектора, состоящего из трех ламелей 17 с углом ≈120о каждая. На поверхности регулятора 9 расположены неподвижная щетка 18 и подвижная щетка 19 с рукояткой 20 с возможностью перемещения на угол α. Щетки 18 и 19 электрически соединены с цепью 5 управления тиристоров 4 выпрямителя 2. Рукоятка 20 с помощью обратной связи связана с переменной индуктивностью 21 регулятора 22 напряжения. Регулятор напряжения на выходе электрически соединен с двигателем 12 постоянного тока, а на входе - с выпрямителем 23 напряжения, выполненным по схеме Ларионова на диодах и соединенным с сетью переменного трехфазного тока. Регулятор может быть также выполнен только на полупроводниковых элементах. Все определяется технико-экономическим обоснованием.
Способ регулирования осуществляется следующим образом.
На выпрямители 2 и 23 подается переменный трехфазный ток, вследствие чего на регулятор 22 и двигатель 12 поступает постоянный ток и двигатель 12 начинает вращаться, сообщая вращение валу 11 электромеханического коммутатора 1, со скоростью ω. Через выпрямитель 2 и ограничитель 6 напряжения постоянный ток поступает на щетки 2, а затем на коллектор 8, где он преобразуется в переменный трехфазный ток, и через щетки 24 поступает на клеммы 16, к которым подключается регулируемый асинхронный двигатель.
При неизменной величине амплитуды переменного напряжения ток, подаваемый в статорную обмотку, формируется в виде импульсов, длительность которых регулируется обратно пропорционально изменению частоты. Согласно фиг.2 Δt1, Δt2, Δt3 - длительности сформированных импульсов тока, Δtр - промежуток времени между ними. Сумма этих величин равна периоду Т питающего тока, т.е. :
Т = Δt1 + Δt2 + Δt3 + 2 Δtр. (1)
При установившемся режиме имеют
Δt1 = Δt2 = Δt3 = 3 Δt . (2)
Чтобы поддерживать действующее значение тока в фазах статора постоянным по модулю для обеспечения постоянства магнитного потока, необходимо регулировать величину (длительность) импульса в зависимости от его частоты при нерегулируемом напряжении согласно зависимости
3Iν Δtν = I = сonst, (3) где I - действующее значение тока двигателя при ν = 50 Гц;
Iν - действующее значение тока двигателя при частоте ν ;
ν - частота тока в статорной обмотке;
Δt - длительность импульса тока, подводимого к статорной обмотке. т.е. импульс тока 3Iν Δt за период должен регулироваться обратно пропорционально изменению частоты тока.
Регулируя длительность Δt импульса обратно пропорционально изменению частоты тока, изменяют и импульс тока, а следовательно, поддерживают магнитный поток постоянным.
Частота преобразованного тока выражается следующей формулой:
ν =  (4) где ν- частота тока, поступившего в статорную обмотку двигателя;
(4) где ν- частота тока, поступившего в статорную обмотку двигателя;
ω- скорость вращения вала 11.
Длительность Δt импульса выражается следующей зависимостью:
Δt =  (5) где β= 120о - угол между кольцами 7;
(5) где β= 120о - угол между кольцами 7;
α- угол между щетками 18 и 19.
Тогда формула (3) для данной схемы регулятора имеет следующий вид:
3Iν ν = I = const (6)
ν = I = const (6)
Изменением угла α от αмакс до 0о поворотом рукоятки 20 осуществляется перемещение штока 25 (фиг.3) обратной связи и изменение сопротивления регулятора 26, которое ведет к изменению тока в индуктивности 27. Одновременно с этим изменяется время включения цепи 5 (длительность импульса Δt) управления тиристоров 4 выпрямителя 2. Так как между ламелями 17 регулятора 9 длительности импульсов через 120о имеется электрический разрыв, то, когда он находится между щетками 18 и 19, цепь 5 обесточена и тиристоры 4 выключены. При изменении тока индуктивности 27 изменяется насыщенность магнитопровода и величина индуктивного элемента 28, а следоватеьно, изменяется частота включения и отключения регулятора 22 напряжения.
Таким образом, регулируются напряжение и ток, поступающие на двигатель 12, вследствие чего и происходит изменение частоты вращения двигателя.
В соответствии с конструкцией электромеханического коммутатора 1 и формулой (6) при изменении поворотом рукоятки 20 углаα от αмакс до 0о частота двигателя 12 изменеятся в пределах ωмин - ωмакс, а длительность импульса, а следовательно, и его величина импульса изменяется обратно пропорционально изменению частоты вращения, т.е. частоте ω. Таким образом, поворотом рукоятки регулируется частота вращения асинхронного двигателя при нерегулируемом напряжении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ВЯЗКОСТИ ФЕРРОМАГНЕТИКОВ | 2007 |
|
RU2338216C1 |
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД С ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2262794C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЧАСТОТЫ ГЕНЕРАТОРА | 2007 |
|
RU2368073C2 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| МАЛОВЕНТИЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2017 |
|
RU2702761C2 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| ИМПУЛЬСНЫЙ СПОСОБ РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ В ЭЛЕКТРИЧЕСКОМ ДИФФЕРЕНЦИАЛЕ ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2585202C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |

Использование: в механизмах с тяжелыми условиями работы - центрифугах, штанговых нефтяных насосах и т.д. Сущность: по способу регулирования частоты вращения асинхронного двигателя переменный ток подают в статорные обмотки в виде импульсов и регулируют частоту вращения изменением частоты подводимого тока обратно пропорционально изменению длительности импульсов тока. 3 ил.
СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ путем изменения частоты подводимого к статорной обмотке переменного тока, отличающийся тем, что ток формируют в виде импульсов, изменение частоты которых осуществляют обратно пропорционально изменению длительности импульсов.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Частотно-регулируемый электропривод | 1973 |
|
SU657562A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
