Область техники, к которой относится изобретение
Предлагаемое изобретение относится к электрооборудованию тягового транспортного электроподвижного состава, т.е. таких тяговых транспортных средств, как тепловозы, дизель-поезда, автомобили, тягачи и т.д., у которых электрические передачи мощности переменного тока с вала теплового двигателя к осям движущих колес выполнены на переменном токе с непосредственным подключением асинхронных тяговых двигателей к синхронному тяговому генератору без промежуточных преобразователей.
Уровень техники
Известны электрические передачи мощности переменного тока, не содержащие промежуточных преобразователей между синхронным тяговым генератором и асинхронными тяговыми двигателями, частота вращения валов которых изменяется ступенями путем изменения числа полюсов 2р электрических машин [Патенты Великобритании 1064772, Кл. Н2А, 1964 и 1067070, Кл. Н2А, 1974]. Эти электрические передачи мощности переменного тока имеют сложную многоприводную систему, что усложняет передачу, снижает ее надежность и ухудшает тяговые свойства тягового транспортного средства. Недостатком указанных передач является то, что скоростной диапазон не может быть широким, так как число переключений полюсов не превосходит одного-двух из-за чрезмерного возрастания веса коммутационной аппаратуры и самих электрических машин. Переключение полюсов электрических машин связано с коммутацией силовой цепи статора, передающей мощность от синхронного тягового генератора к асинхронным тяговым двигателям, что приводит к исчезновению силы тяги в процессе переключения и к броскам токов и моментов в начале и конце такого переключения.
Известна электрическая передача мощности переменного тока с полюсопереключаемыми машинами [А.Д. Степанов, А.А. Будницкий, В.С. Строков и др. Исследование электрической передачи переменного тока с полюсопереключаемыми машинами на макетном тепловозе. - Коломна, Труды ВНИ-ТИ, вып.41, 1975, с.60-67. Электрические передачи переменного тока тепловозов и газотурбовозов // Степанов А.Д., Андерс В.И., Пречисский В.А. и др. - М.: Транспорт, 1982, с.109]. Передача содержит трехфазный синхронный тяговый генератор, имеющий две отдельные статорные обмотки, двухскоростные асинхронные тяговые двигатели и систему регулирования напряжения и управления переключениями полюсов. Переключение полюсов синхронного тягового генератора и асинхронных тяговых двигателей осуществляется блоком управления переключениями. Время переключения составляет 0,5 с, потеря силы тяги - 50%. Трехфазный синхронный тяговый генератор может иметь число полюсов 2рГ1=6 или 2рГ2=4. Отношение числа полюсов синхронного тягового генератора составляет 1,5. Двухскоростные асинхронные тяговые двигатели имеют число полюсов 2рД1=8 и 2рД1=4. Отношение числа полюсов асинхронных тяговых двигателей составляет 2,0. Таким образом, скоростной диапазон, обеспечиваемый переключением полюсов, равен 3,0. Очевидно, что такой скоростной диапазон недостаточен для электрической передачи мощности переменного тока тягового транспортного средства. Кроме того, наличие полюсопереключаемого синхронного тягового генератора усложняет передачу мощности, а скоростной диапазон расширяется незначительно (в 1,5 раза). Электрическая передача мощности переменного тока работает следующим образом. Тепловой двигатель тягового транспортного средства имеет минимальную частоту вращения вала (холостого хода) 900 об/мин. При этом частота напряжения синхронного тягового генератора при pГ1=2 составляет 30 Гц. При этой частоте напряжения и числе пар полюсов, равном 4, асинхронные тяговые двигатели за счет уменьшения скольжения от 1,0 до номинального значения разгоняются до 450 об/мин. Разгон тягового транспортного средства осуществляется за счет увеличения частоты вращения вала энергетической установки (теплового двигателя, работающего совместно с синхронным тяговым генератором) до номинального значения 1500 об/мин и увеличения частоты напряжения синхронного тягового генератора до 50 Гц. При этой частоте напряжения асинхронные тяговые двигатели разгоняются до 750 об/мин. Для осуществления дальнейшего увеличения скорости движения тягового транспортного средства частота вращения вала энергетической установки должна уменьшаться до требуемого минимального значения (1000 об/мин). После чего включаются обмотки синхронного тягового генератора с большим числом полюсов (рГ2=3), и дальнейший разгон тягового транспортного средства осуществляется за счет уменьшения скольжения асинхронных тяговых двигателей до номинального значения и за счет увеличения частоты вращения вала энергетической установки до номинального значения. Для осуществления дальнейшего увеличения скорости движения тягового транспортного средства частота вращения вала энергетической установки уменьшается до требуемого минимального значения (1125 об/мин). После чего включаются обмотки асинхронных тяговых двигателей с меньшим числом полюсов (рД2=2), и дальнейший разгон тягового транспортного средства осуществляется за счет уменьшения скольжения асинхронных тяговых двигателей до номинального значения и за счет увеличения частоты вращения вала энергетической установки до номинального значения. Для осуществления дальнейшего увеличения скорости движения тягового транспортного средства частота вращения вала энергетической установки уменьшается до требуемого минимального значения (1000 об/мин). После чего включаются обмотки синхронного тягового генератора с большим числом полюсов (рГ2=3), и дальнейший разгон тягового транспортного средства осуществляется за счет уменьшения скольжения асинхронных тяговых двигателей (при pД2=2) до номинального значения и за счет увеличения частоты вращения вала энергетической установки до номинального значения.
Однако в [А.Д. Степанов, А.А. Будницкий, B.C. Строков и др. Исследование электрической передачи переменного тока с полюсопереключаемыми машинами на макетном тепловозе. - Коломна, Труды ВНИТИ, вып.41, 1975, с.60-67.] показано, что (см. рис.4) частота вращения вала энергетической установки имеет номинальное значение как на первой, так и на второй ступени скорости. При этом на первой ступени скорости частота напряжения синхронного тягового генератора составляет 50 Гц. При этой частоте напряжения асинхронные тяговые двигатели имеют синхронную частоту вращения вала 750 об/мин. На второй ступени скорости частота напряжения синхронного тягового генератора составляет 75 Гц. При этой частоте напряжения асинхронные тяговые двигатели должны иметь синхронную частоту вращения вала 1125 об/мин. Это означает, что на второй ступени скорости асинхронные тяговые двигатели должны увеличивать частоту вращения вала за счет уменьшения скольжения от 0,33 до номинального значения. При этом тяговые электрические машины (синхронный тяговый генератор и асинхронные тяговые двигатели) довольно длительное время работают при больших токах нагрузки, что приводит к значительному перегреву и уменьшению их надежности.
Аналоги предлагаемого изобретения, наиболее близкие к нему по совокупности существенных признаков (прототипы)
Известен регулируемый электропривод переменного тока, содержащий синхронный тяговый генератор с несколькими m-фазными обмотками статора, приводимый во вращение тепловым двигателем, и полюсопереключаемые асинхронные тяговые двигатели, подключенные к синхронному тяговому генератору, у которого соседние обмотки статора взаимно смещены по окружности его расточки [АС СССР №691320, М. Кл.2 B60L 11/08, 1979, БИ 38]. Этот электропривод отличается очень большой сложностью синхронного тягового генератора. В описании этого изобретения не освещается система управления электроприводом и тепловым двигателем.
Все электрические передачи мощности переменного тока, содержащие синхронный тяговый генератор и подключенные к нему асинхронные тяговые двигатели с короткозамкнутым ротором, имеющие статорные полюсопереключаемые обмотки, работают следующим образом.
Разгон тягового транспортного средства осуществляется при включенных обмотках синхронного тягового генератора с наименьшим числом полюсов и асинхронных тяговых двигателей с максимальным числом полюсов и при работе теплового двигателя и синхронного тягового генератора с минимальной частотой вращения вала (частотой вращения холостого хода). Разгон тягового транспортного средства вначале осуществляется за счет уменьшения скольжения асинхронных тяговых двигателей до номинального значения и затем за счет увеличения частоты вращения вала энергетической установки до номинального значения. Для осуществления дальнейшего увеличения скорости движения тягового транспортного средства частота вращения вала энергетической установки уменьшается до требуемого минимального значения. После чего включаются обмотки асинхронных тяговых двигателей с меньшим числом полюсов, и дальнейший разгон тягового транспортного средства осуществляется за счет уменьшения скольжения асинхронных тяговых двигателей до номинального значения и за счет увеличения частоты вращения вала энергетической установки до номинального значения. Для осуществления дальнейшего увеличения скорости движения тягового транспортного средства частота вращения вала энергетической установки снова уменьшается до требуемого минимального значения. После чего включаются обмотки асинхронных тяговых двигателей с меньшим числом полюсов, и дальнейший разгон тягового транспортного средства осуществляется за счет уменьшения скольжения асинхронных тяговых двигателей до номинального значения и за счет увеличения частоты вращения вала энергетической установки до номинального значения. Таким образом, при электрической передаче мощности переменного тока, содержащей синхронный тяговый генератор и подключенные к нему асинхронные тяговые двигатели с короткозамкнутым ротором, имеющие статорные полюсопереключаемые обмотки, изменение скорости движения тягового транспортного средства осуществляется путем переключения обмоток и изменением частоты вращения вала энергетической установки в полном диапазоне при каждом переключении числа полюсов полюсопереключаемых обмоток синхронного тягового генератора или асинхронных тяговых двигателей. То есть при этом энергетическая установка значительную часть времени работает при переходных процессах. Анализ результатов исследований переходных процессов тепловых двигателей показывает, что индикаторные и эффективные параметры работы теплового двигателя значительно отличаются от их значений при соответствующих установившихся режимах. При одинаковых цикловых подачах топлива на установившихся и неустановившихся режимах, связанных с ростом нагрузки, на последних достигаются меньшие мощности. Уменьшение мощности на неустановившихся режимах приводит к существенному росту удельного расхода топлива. Низкая экономичность и повышенная дымность выпускных газов при переходных процессах, связанных с повышением нагрузки, являются результатом неудовлетворительного протекания индикаторного процесса, о чем свидетельствует резкое снижение индикаторного кпд. Таким образом, значительная продолжительность переходных процессов и низкая экономичность их протекания обуславливают их отрицательное влияние на среднеэксплуатационный кпд энергетической установки тягового транспортного средства. Кроме того, переходные процессы снижают долговечность и надежность энергетической установки из-за ускоренного закоксовывания выпускного тракта и проточной части турбины теплового двигателя в результате неполного сгорания топлива и повышенных амплитуд колебаний температуры поверхности деталей цилиндро-поршневой группы [Тепловозные двигатели внутреннего сгорания / А.Э. Симсон, А.З. Хомич, А.А. Куриц и др. - М.: Транспорт, 1987. - С.391-392].
Известна также электрическая передача мощности переменного тока [Патент РФ №2225301], которая содержит тяговый генератор переменного тока, приводимый во вращение от теплового двигателя, и асинхронные тяговые двигатели с короткозамкнутым ротором. Тяговый генератор выполнен асинхронным, статорная обмотка подключена непосредственно к асинхронным двигателям, а обмотка фазового ротора подключена к преобразователю частоты. Последний подключен к регулятору частоты асинхронного тягового генератора, соединенному с контроллером управления, и к статорной обмотке синхронного возбудителя, приводимого во вращение от теплового двигателя. Обмотка возбуждения возбудителя подключена к регулятору напряжения асинхронного тягового генератора, соединенному с контроллером управления. Данная электрическая передача мощности переменного тока позволяет получить плавное и непрерывное изменение касательной силы тяги, а также скорости тягового транспортного средства без применения промежуточных преобразователей и устройств переключения между асинхронным тяговым генератором и асинхронными тяговыми двигателями. Изобретение обеспечивает расширение диапазона скорости движения тягового транспортного средства, а также повышение тяговых свойств, надежности и экономичности. Скоростной диапазон составляет 2-3. Существенным недостатком этой электрической передачи мощности переменного тока является то, что увеличение скоростного диапазона приводит к значительному увеличению массы возбудителя [Торопцев Н.Д., Алюшин Г.Н. Асинхронные генераторы повышенной частоты. М.: Машиностроение, 1974. С.282-284].
Известные электрические передачи мощности переменного тока тяговых транспортных средств имеют существенные недостатки. В электрических передачах мощности переменного тока с частотным управлением асинхронными тяговыми двигателями применяются преобразователи частоты, имеющие определенные габаритные размеры, вес и стоимость. Так, цена универсального трехфазного преобразователя частоты с фильтром радиопомех к нему превышает цену асинхронного тягового двигателя с короткозамкнутым ротором приблизительно в полтора десятка раз [Ванурин В.Н. Статорные обмотки асинхронных двигателей. - Зерноград, ВНИПТИМЭСХ. - 2001. С.164].
Сущность изобретения
Общий закон управления асинхронным тяговым двигателем с короткозамкнутым ротором на локомотиве имеет вид [Розенфельд В.Е., Исаев И.П., Сидоров Н.Н. Теория электрической тяги. - М.: Транспорт, 1983. С.190-191]

где скорость движения ν1 и касательная сила тяги F1 соответствуют частоте f11 питающего напряжения, a ν2 и F2 - частоте питающего напряжения f12.
Оптимальный режим работы асинхронного тягового двигателя с короткозамкнутым ротором определяется соотношением трех его основных параметров: напряжения U1, частоты f1 и вращающего момента M1 [Винокуров В.А., Попов Д.А. Электрические машины железнодорожного транспорта. - М.: Транспорт, 1986. С.377-379]

Меняя соотношение между этими параметрами по закону (2) можно обеспечить работу асинхронного тягового двигателя с наименьшими потерями. При этом характер изменения нагрузки в зависимости от частоты вращения должен быть задан заранее.
Система управления асинхронным тяговым двигателем задает частоту питающего напряжения f1 с заданным превышением над частотой, соответствующей частоте вращения ротора (f1-f2), что и обеспечивает регулирование величины f2. Таким образом, входными управляющими воздействиями для асинхронного тягового двигателя остаются лишь два: напряжение U1 и частота f1.
Имеется принципиальное отличие по условию статической устойчивости для нерегулируемых и регулируемых по частоте и напряжению асинхронных тяговых двигателей. У первых предел статической устойчивости указывает на перегрузочную способность асинхронного тягового двигателя по моменту. Он позволяет определить критический или максимально достижимый момент Mmax и максимальное реализуемое скольжение smax для асинхронного тягового двигателя данного типа. Попытка увеличить нагрузку сверх предельной по статической устойчивости приводит к «опрокидыванию» асинхронного тягового двигателя, к режиму короткого замыкания. Обычно кратность максимального и номинального моментов составляет 2-3. Для частотно-регулируемых асинхронных тяговых двигателей критический момент определяется критической частотой тока ротора f2К, причем он может быть значительно меньше номинального при определенных условиях изменения управляющих воздействий U1 и f1, то есть статическая устойчивость, определяемая частотой f2К, не является однозначной характеристикой, указывающей на возможность реализации определенного максимального момента. Критические моменты будут различными для разных зон (режимов) работы асинхронного тягового двигателя.
Частота f2К для частотно-регулируемых асинхронных тяговых двигателей может составлять 3-10 Гц, чему при номинальном значении магнитного потока будут соответствовать весьма значительные максимальные моменты, определяемые соотношением Mmax/Мном=4÷10 [Курбасов А.С., Седов В.И., Сорин Л.Н. Проектирование тяговых электродвигателей. - М.: Транспорт, 1987. С.371-373].
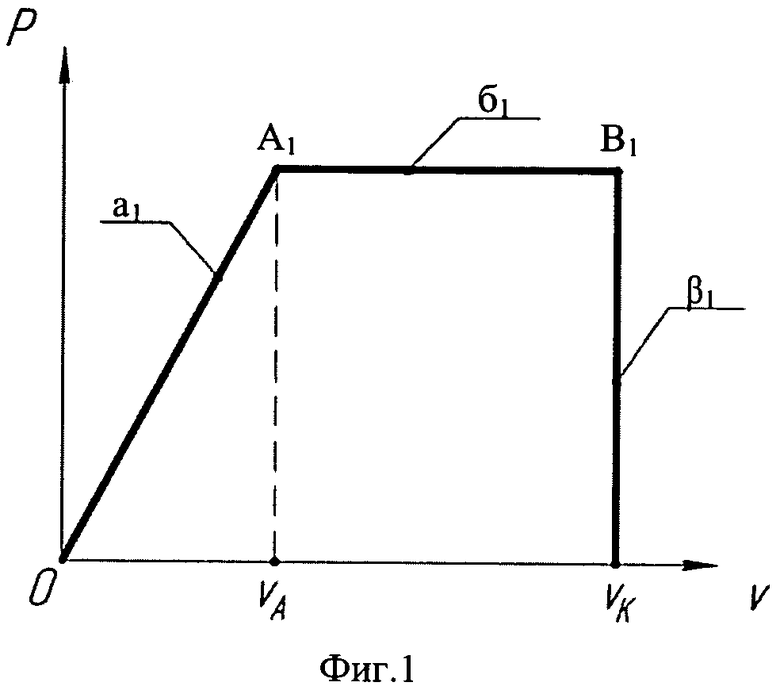
Наиболее характерные законы управления асинхронным тяговым двигателем представлены на фиг.1 (Фиг.1. Зависимость мощности тягового транспортного средства от скорости его движения, νA - скорость движения тягового транспортного средства при выходе на постоянную мощность Р, νК - конструкционная скорость движения тягового транспортного средства: линия а1-F=const; линия б1-Р=const (F=P/ν); линия в1-U1=const).
Разгон тягового транспортного средства осуществляется при постоянстве касательной силы тяги F, то есть при М=const. Вращающий момент на валу асинхронного тягового двигателя определяется взаимодействием его магнитного потока Ф и тока ротора I2, приведенного к цепи статора. При неизменном магнитном потоке Ф условие М=const равносильно условию I2=const. Так как ток статора I можно представить в виде I=I0+(-I2), где I0 - ток холостого хода, то постоянство момента асинхронного тягового двигателя равносильно также условию I=const. Это значит, что в течение времени разгона ток статора должен быть неизменным, если необходимо обеспечить условие F1/F2=1. При этом условии на основании соотношения (2) получим

Значит, для сохранения условия I=const в процессе разгона тягового транспортного средства и обеспечения оптимальных показателей работы асинхронного тягового двигателя следует повышать напряжение, приложенное к обмотке статора, пропорционально скорости движения тягового транспортного средства:

После выхода на номинальную характеристику асинхронного тягового двигателя, то есть при ν≥νA (фиг.1), нужно соблюдать постоянство мощности теплового двигателя, синхронного тягового генератора и асинхронного тягового двигателя, которая равна произведению касательной силы тяги и скорости движения тягового транспортного средства. Это значит, что касательная сила тяги должна изменяться обратно пропорционально скорости движения тягового транспортного средства: F=Р/ν.
Так как Р1/Р2=F1ν1/F2ν2=1, то, возведя обе части выражения (1) в квадрат, получим 
Следовательно, для обеспечения условия постоянства мощности асинхронного тягового двигателя автоматическая система регулирования напряжения синхронного тягового генератора должна изменять напряжение на его статорной обмотке пропорционально корню квадратному из его частоты:

Режим постоянства скорости движения, то есть ν=const или ν1/ν2=1, равносилен условию постоянства частоты напряжения синхронного тягового генератора f11/f12=1. При этом из выражении (1) получим 
Значит, для обеспечения постоянства скорости ν движения тягового транспортного средства напряжение синхронного тягового генератора U1 необходимо изменять пропорционально корню квадратному из касательной силы тяги F или момента М:

Перспективным законом управления асинхронным тяговым двигателем с короткозамкнутым ротором является закон, обеспечивающий максимальное отношение электромагнитного момента к квадрату потребляемого тока [Винокуров В.А., Попов Д.А. Электрические машины железнодорожного транспорта. - М.: Транспорт, 1986. С.378-379]

Этот критерий универсален, пригоден для управления как электромеханическими переходными процессами при пуске и торможении, так и установившимися режимами работы асинхронных тяговых двигателей. Действительно, при ограничении силы тока синхронного тягового генератора (I<Imax) управление по критерию (7) обеспечивает максимум момента асинхронного тягового двигателя при заданном токе (I=const) и соответственно минимальное время пуска или торможения асинхронного тягового двигателя.
При ограничении не только тока, но и напряжения синхронного тягового генератора, разгон асинхронного тягового двигателя может осуществляться в два этапа: 1) разгон при I<Imax с соблюдением критерия (7) до тех пор, пока напряжение синхронного тягового генератора не достигнет заданного предельного значения; 2) дальнейший разгон до заданной скорости при U=const и I=νar с соблюдением критерия (7), при этом I<Imax.
Если напряжение синхронного тягового генератора сохраняется постоянным, то есть U1/U2=1, то на основании соотношения (1) получим 
Следовательно, тяговая характеристика F(ν) изменяется по закону квадратичной гиперболы. При условии постоянства напряжения синхронного тягового генератора U, изменяя касательную силу тяги F (ток I) асинхронного тягового двигателя обратно пропорционально частоте f1, получим «мягкую» характеристику асинхронного тягового двигателя при минимуме потерь.
Например, при неизменном напряжении синхронного тягового генератора, имеющем при Пк=1 (первое положение рукоятки контроллера машиниста) частоту f1=30 Гц, асинхронный тяговый двигатель развивает касательную силу тяги F1 (линия в2 на фиг.2) (Фиг.2. Характеристика сопротивления движению тягового транспортного средства W(ν) (линия a
2) и механические характеристики асинхронного тягового двигателя при разгоне тягового транспортного средства: линия б2 - при частоте 30 Гц; линия в2 - 32,5 Гц; линия г2 - 35 Гц; линии д2÷ж2 - при переменных частоте и напряжении). С ростом частоты f1 напряжения синхронного тягового генератора увеличивается скорость движения ν. Если частота f1 напряжения синхронного тягового генератора и скорость движения ν возросли в 32,5/30 раза (при Пк=2), то сила тяги асинхронного тягового двигателя F уменьшится на основании зависимости (1) в отношении 
При увеличении напряжения U синхронного тягового генератора характеристики смещаются в область более высоких скоростей (линия е2 на фиг.2), при понижении - в область более низких скоростей движения тягового транспортного средства (линия ж2 на фиг.2). Таким образом, одновременно изменяя напряжение синхронного тягового генератора U1 и его частоту f1, можно получить в зависимости от принятого закона управления требуемые тяговые характеристики F(ν) тягового транспортного средства.
Электрическая передача мощности переменного тока тягового транспортного средства с синхронным тяговым генератором и многоскоростными асинхронными тяговыми двигателями, имеющими полюсопереключаемые обмотки, является «прозрачной» и подобна многоскоростной механической передаче. В таких передачах мощности для обеспечения простоты переключения ступеней передачи рекомендуется определять интервалы скоростей движения νi из условия, соответствующего соотношению [Тепловозы. Под ред. Н.И. Панова. - М.: Машиностроение, 1976. - С.108]

где с=0,45÷0,70.
Если многоскоростной асинхронный тяговый двигатель имеет полюсопереключаемые обмотки с числом пар полюсов, например, р=8, 4, 2 и 1 [Попов Д.А., Попов С.Д. Трехфазная полюсопереключаемая обмотка. Патент РФ №2014711], то соотношение скоростей передачи в соответствии с выражением (8) будет иметь вид

Из этого выражения видно, что распределение числа пар полюсов (а значит, и частот вращения вала) асинхронного тягового двигателя соответствует требованию распределения ступеней скорости в «прозрачных» передачах мощности тяговых транспортных средств.
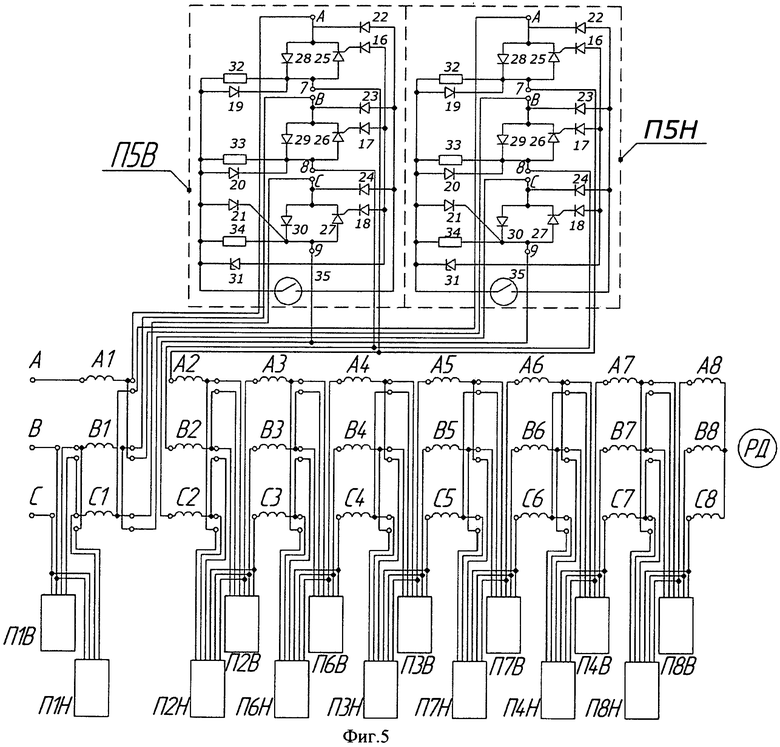
Обмотка статора принятого для предлагаемой передачи мощности асинхронного тягового двигателя [Попов Д.А., Попов С.Д. Трехфазная полюсопереключаемая обмотка. Патент РФ №2014711] выполнена из 24 катушечных групп с выводами. Коммутационные аппараты (коммутаторы) соединяют катушечные группы так, что они образуют на расточке статора асинхронного тягового двигателя фазные зоны с целым числом катушек на зону. При подаче трехфазного напряжения на входные зажимы А, В и С обмотки последняя создает в воздушном зазоре магнитное поле, первая пространственная гармоника которого вращается в одном и том же направлении с частотой вращения, зависящей от числа пар полюсов. В зависимости от положения переключателей (коммутаторов) частота вращения поля (при частоте питающего напряжения 50 Гц) равна 375 об/мин при включении на 8 пар полюсов, 750 об/мин - при включении на 4 пары полюсов, 1500 об/мин - при включении на 2 пары полюсов и 3000 об/мин - при включении на одну пару полюсов. Трехфазная полюсопереключаемая обмотка на четыре числа пар полюсов двухслойная (трехзонная), соединенная в звезду с одной параллельной ветвью в каждой фазе при всех числах пар полюсов, состоящая из одинаковых равномерно распределенных катушек, входящих в катушечные группы по S рядом лежащих последовательно согласно расположению включенных катушек (S=1, 2, 3 …). Обмотка состоит из 24 катушечных групп, разделенных на 24 одинаковые части с номерами А1÷А8, В1÷В8, C1÷С8 так, что катушечные группы с номерами 1, 10, 4, 19, 7, 16, 22, 13 включены в части A1, А2, A3, А4, А5, А6, А7, А8 соответственно. Катушечные группы с номерами 17, 2, 20, 11, 23, 8, 14, 5 включены в части B1, В2, В3, В4, В5, В6, В7, В8 соответственно. Катушечные группы с номерами 9, 18, 12, 3, 15, 24, 6, 21 включены в части C1, С2, С3, С4, С5, С6, С7, С8 соответственно. Части обмотки соединены с 16 переключателями, из них первые два переключателя П1В и П1Н двухфазные, остальные четырнадцать переключателей П2В÷П8В, П2Н÷П8Н - трехфазные.
В предлагаемой электрической передаче мощности переменного тока тягового транспортного средства с микропроцессорной системой управления функции переключателей выполняют тиристорные коммутаторы [Федоров Г.В. Тиристорный коммутатор. Патент РФ №2262188. Опубл. 2005.10.10], что является отличительной особенностью предлагаемой передачи и повышает ее надежность и уменьшает массу передачи. Это также делает возможным использовать в тиристорных коммутаторах в качестве управляющего ключа (контакта) слабомощные переключатели, в частности магнитоуправляемые герконовые управляющие контакты (герконы), имеющие повышенную надежность, долговечность и число безотказных срабатываний. Использование предлагаемого коммутатора позволяет увеличить число безотказных срабатываний с 104÷105 до 106÷107 [Коммутатор. Патент РФ №2116236. Опубл. 27.07.1998].
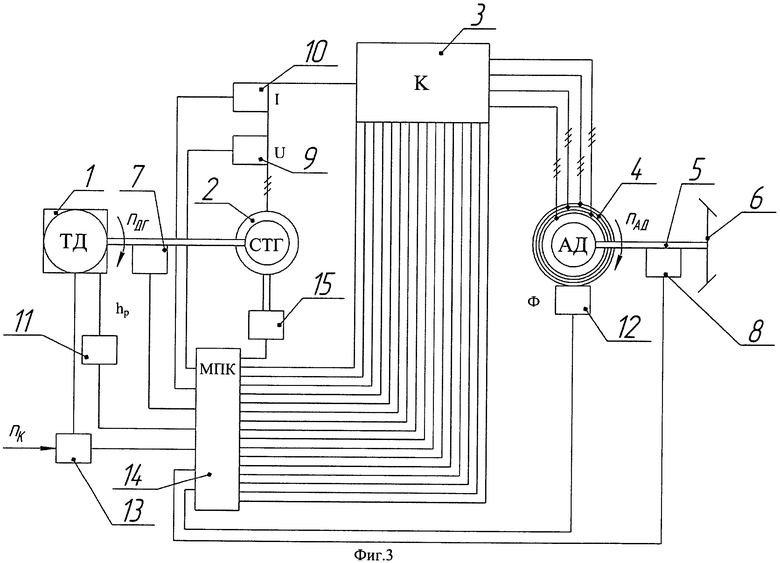
Предлагаемая электрическая передача мощности переменного тока тягового транспортного средства с микропроцессорной системой управления построена следующим образом (см. фиг.3. Принципиальная схема электрической передачи мощности переменного тока тягового транспортного средства с микропроцессорной системой управления). Вал теплового двигателя 1 соединен с валом трехфазного синхронного тягового генератора 2. Тепловой двигатель и синхронный тяговый генератор образуют энергетическую установку, к которой посредством тиристорных коммутаторов 3 подключаются статорные обмотки многоскоростного асинхронного тягового двигателя 4 с короткозамкнутым ротором, вал которого соединен с осью 5 движущей колесной пары 6. Частота вращения вала энергетической установки nДГ измеряется датчиком 7, а частота вращения вала асинхронного тягового двигателя 4 nАД измеряется датчиком 8. Напряжение синхронного тягового генератора 2U и его ток I измеряются соответственно датчиками 9 и 10, перемещение hP элементов (реек топливных насосов) органов топливоподачи теплового двигателя измеряется датчиком 11. Магнитный поток Ф асинхронного тягового двигателя измеряется датчиком 12. На фиг.3 позиции 13 соответствует орган управления тяговым транспортным средством. Датчики 7, 8, 9, 10, 11, 12 и орган управления 13 тяговым транспортным средством связаны с тепловым двигателем 1 и микропроцессорным контроллером 14. Микропроцессорный контроллер 14 подключен также к блоку тиристорных коммутаторов 3 и к возбудителю 15 синхронного тягового генератора 2.
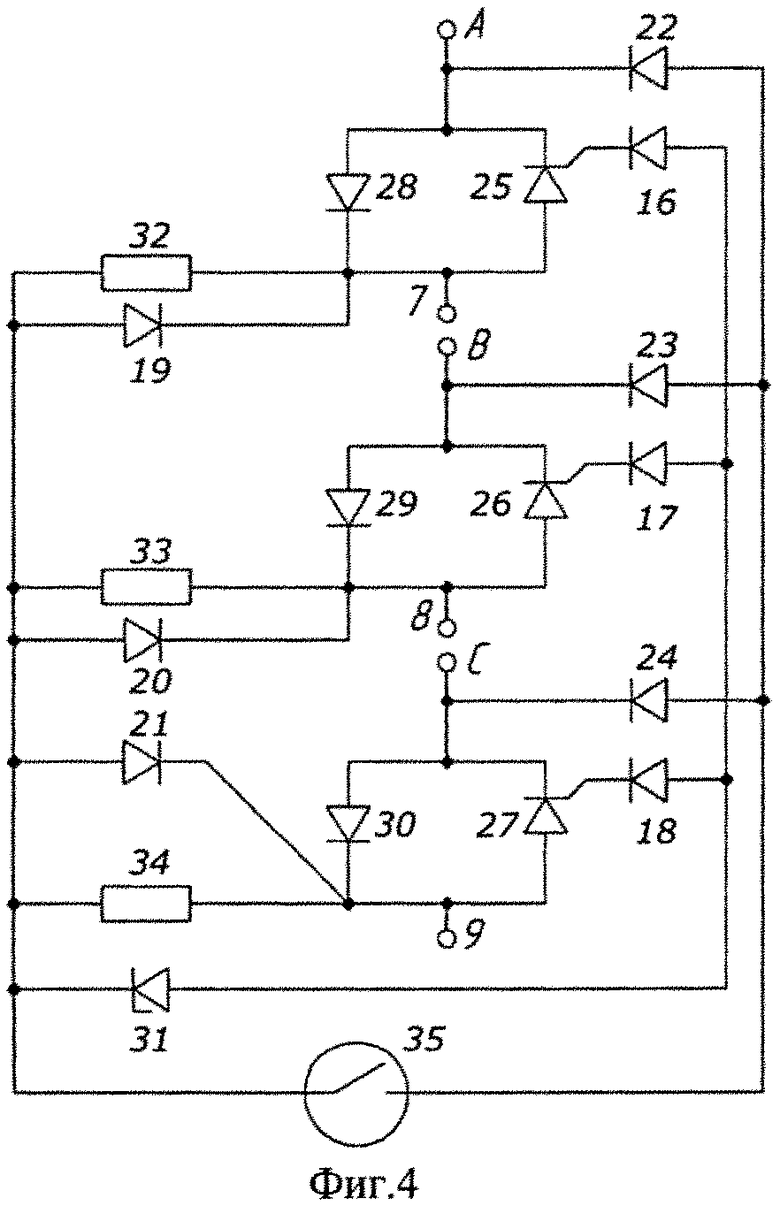
Тиристорный коммутатор (см. фиг.4. Принципиальная схема трехфазного тиристорного коммутатора) содержит девять диодов 16, 17, 18, 19, 20, 21, 22, 23 и 24, три силовых тиристора 25, 26, 27 и три силовых диода 28, 29, 30, стабилитрон 31, три резистора 32, 33 и 34 и управляющий ключ 35. В исходном состоянии управляющий ключ 35 замкнут. При размыкании управляющего ключа 35 коммутатор включается. Для отключения коммутатора управляющий ключ 20 замыкается. При этом управляющие переходы силовых тиристоров 25, 26 и 27 через диоды 22, 23 и 24 шунтируются, что приводит к их закрытию и отключению нагрузки от питающей сети. Управляющие ключи коммутаторов замыкаются и размыкаются под действием выходных сигналов микропроцессорного контроллера 14, подключенного к тиристорным коммутаторам, функции управляющих ключей в которых выполняют герконовые элементы. Микропроцессорный контроллер 14 подключен также к возбудителю синхронного тягового генератора.
При включенных датчиках 7÷12 микропроцессорный контроллер 14 в соответствии с заложенной программой обеспечивает включение и выключение соответствующего числа пар полюсов асинхронного тягового двигателя в зависимости от сигналов Пк и nАД. При этом переключения катушечных групп статорной обмотки асинхронного тягового двигателя производятся в соответствии с таблицей 1.
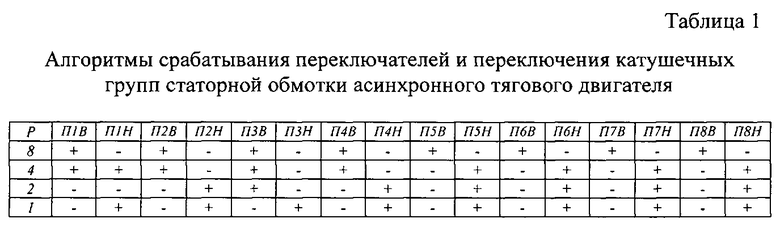
В таблице 1 знак «+» означает включенное состояние коммутатора, а знак «-» означает выключенное состояние коммутатора.
Как видно из таблицы 1, для включения катушечных групп с р1=8 включаются переключатели П1В÷П8В. Для перевода двигателя с первой ступени частоты вращения (р2=8) на вторую ступень частоты вращения (p2=4) выключаются переключатели П5В÷П8В и включаются переключатели П1Н, П5Н÷П8Н; для перевода двигателя со второй ступени частоты вращения на третью ступень частоты вращения (р3=2) включаются переключатели П1В, П3В и включаются переключатели П2Н, П4Н÷П8Н; а для перевода двигателя с третьей ступени частоты вращения на четвертую ступень частоты вращения (р4=1) включаются переключатели П1Н÷П8Н.
На фиг.5 представлена принципиальная схема системы управления асинхронным тяговым двигателем путем переключения полюсов посредством коммутаторов П1В÷П8В и П1Н÷П8Н.
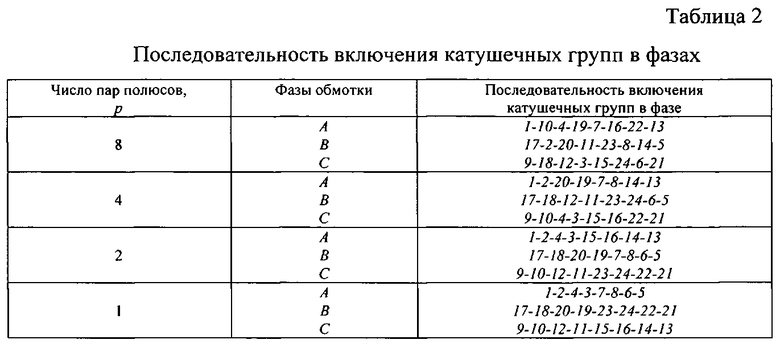
Для образования требуемого числа пар полюсов асинхронного тягового двигателя катушечные группы его статорной обмотки соединяются последовательно в каждой фазе, в порядке, зависящем от числа пар полюсов. Это представлено в таблице 2.
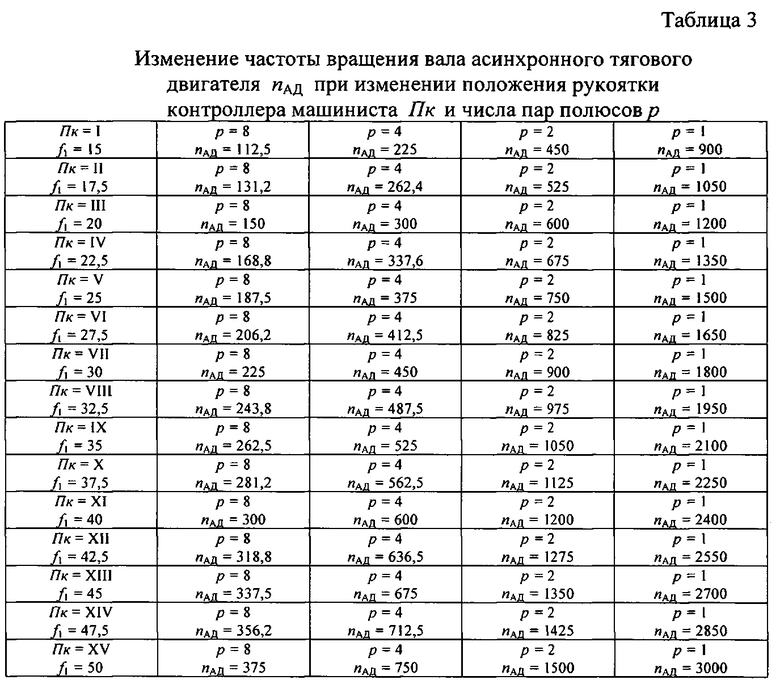
Как изменяется частота вращения вала асинхронного тягового двигателя nАД при изменении положения рукоятки контроллера машиниста Пк и числа пар полюсов р, видно из таблицы 3. Из таблицы 3 видно, что при р1=8 максимальное значение синхронной частоты вращения вала асинхронного тягового двигателя nАД=375 об/мин достигается при Пк=XV. Дальнейшее увеличение синхронной частоты вращения вала асинхронного тягового двигателя и nАД до 750 об/мин может быть достигнуто путем отключения его от синхронного тягового генератора, перевода энергетической установки на Пк=VI, подключения асинхронного тягового двигателя к синхронному тяговому генератору при р2=4 и увеличения Пк до XV. Дальнейшее увеличение синхронной частоты вращения вала асинхронного тягового двигателя nАД до 1500 об/мин может быть достигнуто путем отключения его от синхронного тягового генератора, перевода энергетической установки на Пк=VI, подключения асинхронного тягового двигателя к синхронному тяговому генератору при p3=2 и увеличения Пк до XV. Дальнейшее увеличение синхронной частоты вращения вала асинхронного тягового двигателя nАД до максимального значения 3000 об/мин может быть достигнуто путем отключения его от синхронного тягового генератора, перевода энергетической установки на Пк=VI, подключения асинхронного тягового двигателя к синхронному тяговому генератору при р4=1 и увеличения Пк до XV.
Относительная мощность синхронного тягового генератора РГо изменяется примерно пропорционально частоте вращения вала энергетической установки nДГ, и в электрической передаче мощности переменного тока передача поддерживается автоматической системой регулирования частоты вращения вала и мощности энергетической установки на уровне, определяемом частотой вращения вала асинхронного тягового двигателя nАД. Для энергетической установки тепловоза ТЭ25 зависимость относительной мощности от частоты вращения вала энергетической установки описывается выражением

В электрической передаче мощности переменного тока тягового транспортного средства с микропроцессорной системой управления в отличие от известных передач мощности переключение числа пар полюсов асинхронного тягового двигателя с короткозамкнутым ротором осуществляется при положениях рукоятки контроллера машиниста Пк: I, VI и XV. Подключение асинхронного тягового двигателя к трехфазному синхронному тяговому генератору осуществляется на Пк=I при р1=8, в результате чего за счет уменьшения скольжения s асинхронного тягового двигателя асинхронная частота вращения его вала nАД увеличивается от нуля до частоты, близкой к 112,5 об/мин. При этом происходит разгон тягового транспортного средства.
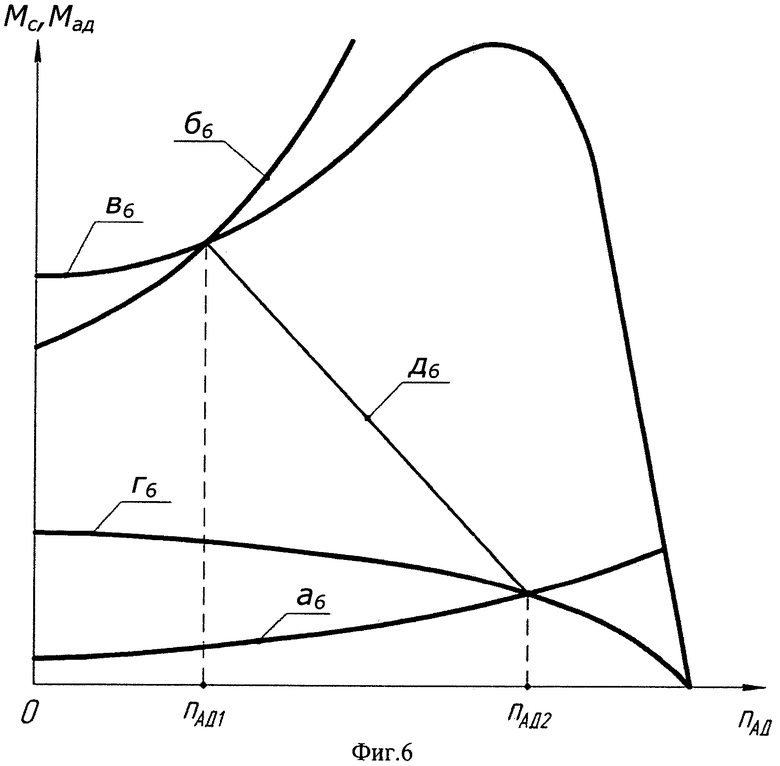
При любом Пк автоматическое поддержание заданной частоты вращения вала асинхронного тягового двигателя, то есть скорости движения тягового транспортного средства, в электрической передаче мощности переменного тока осуществляется за счет действия замкнутой автоматической системы регулирования частоты вращения вала асинхронного тягового двигателя. Механические характеристики асинхронного тягового двигателя (крайние) в замкнутой автоматической системе регулирования частоты вращения вала асинхронного тягового двигателя располагаются в зоне между двумя крайними характеристиками а 6 и б6 в разомкнутой системе (см. фиг.6. Характеристики: а 6, б6 - момент сопротивления нагрузки; в6, г6 - механические асинхронного тягового двигателя при номинальном Uном и минимальном Uмин напряжении соответственно; д6 - статическая замкнутой автоматической системы регулирования частоты вращения вала асинхронного тягового двигателя). Характеристика а 6 подобна части характеристики сопротивления движению тягового транспортного средства при малых скоростях движения. Характеристика б6 подобна части характеристики сопротивления тягового транспортного средства при высоких скоростях движения, а характеристика д6 подобна части тяговой характеристики тягового транспортного средства в диапазоне частоты вращения вала асинхронного тягового двигателя от nАД1 до nАД2. В замкнутой автоматической системе регулирования частоты вращения вала асинхронного тягового двигателя он может работать на неустойчивой части его естественной механической характеристики. При этом обеспечивается плавное регулирование частоты вращения вала асинхронного тягового двигателя в сравнительно широком диапазоне (в нашем случае в диапазоне 900÷1500 об/мин) [Винокуров В.А., Попов Д.А. Электрические машины железнодорожного транспорта. - М.: Транспорт, 1986. С.374, 375].
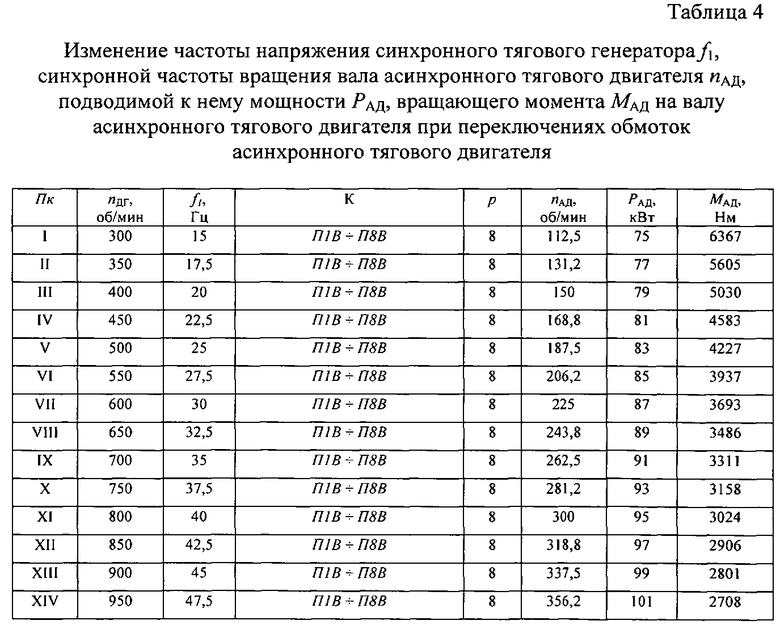
Как при переключениях обмоток асинхронного тягового двигателя изменяется частота напряжения синхронного тягового генератора f1, синхронная частота вращения вала асинхронного тягового двигателя nАД, подводимая к нему мощность РАД, вращающий момент МАД, показано в таблице 4. Для разгона тягового транспортного средства рукоятка контроллера машиниста устанавливается в положение Пк=I.

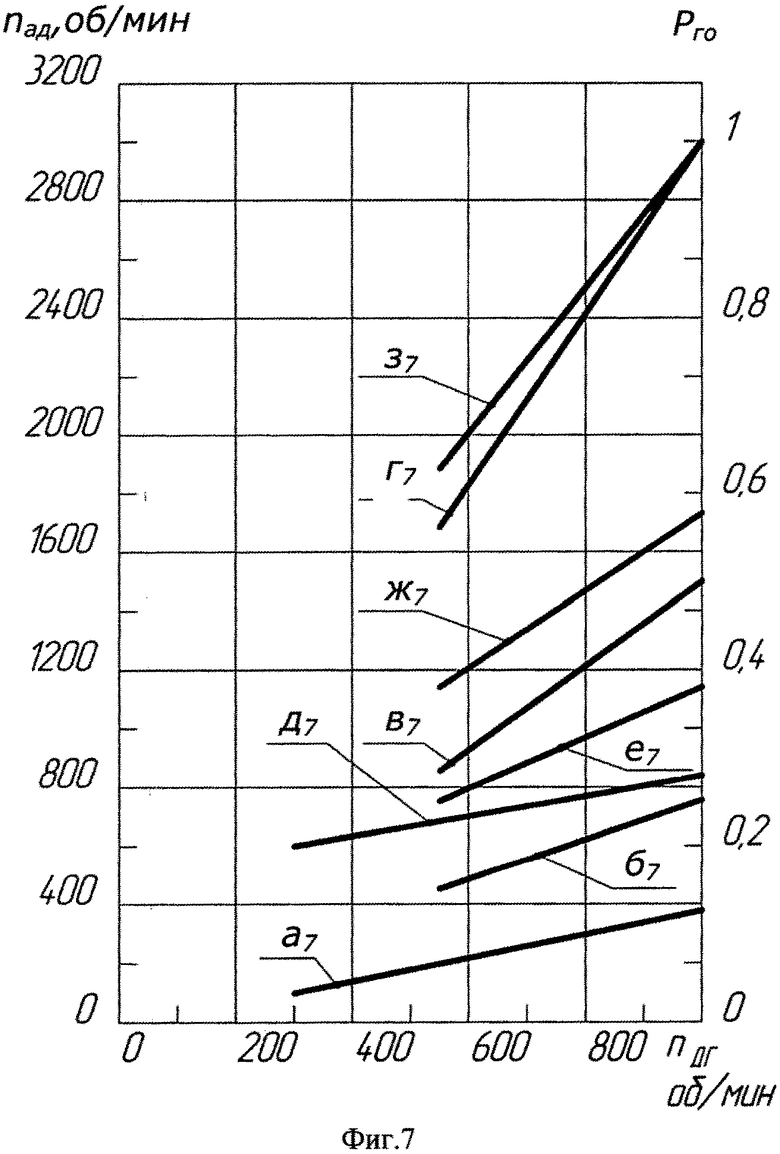
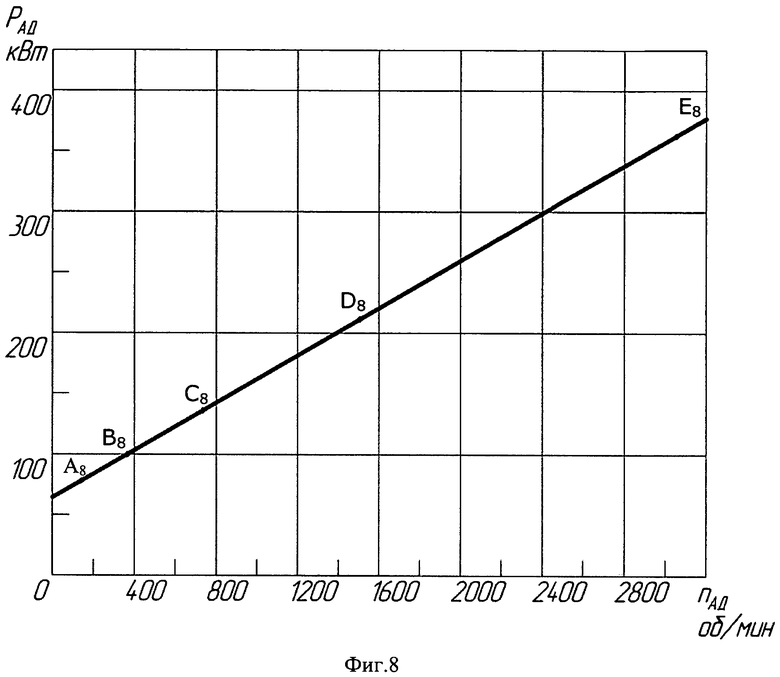
Из таблицы 3 видно, что при р1=8, при Пк=I и при f1=15 Гц синхронная частота вращения вала асинхронного тягового двигателя nАД увеличивается незначительно, всего на 0,0375 от номинального значения. При последующих изменениях Пк от I до XV и f1 до 50 Гц nАД изменяется при смене Пк на единицу каждый раз на 0,062 от номинального значения. При этом фактически реализуется частотное управление асинхронным тяговым двигателем путем ступенчатого изменения частоты питающего напряжения f1 от 15 до 50 Гц. Ступени частоты небольшие Δf1=2,5 Гц (то есть равны 5% от номинального значения). Однако в случае применения на тяговом транспортном средстве бесступенчатого контроллера машиниста (орган управления) частота питающего напряжения f1 также будет меняться бесступенчато (см. фиг.7. Зависимости частоты вращения вала асинхронного тягового двигателя и nАД (скорости движения тягового транспортного средства) (линия a 7 при р1=8, линия б7 при р2=4, линия в7 при р3=2, линия г7 при р4=1) и относительной мощности синхронного тягового генератора РГо (линия д7 при р1=8, линия е7 при р2=4, линия ж7 при р3=2, линия з7 при p4=1) от частоты вращения вала энергетической установки nДГ). При р1=8 и при изменении Пк от I до XV и nДГ от 300 до 1000 об/мин (линия д7 на фиг.4) синхронная частота nАД увеличивается от 112,5 до 375 об/мин (линия a 7 на фиг.4). При этом мощность асинхронного тягового двигателя РАД изменяется от 75 до 103 кВт (см. фиг.8. Зависимость мощности асинхронного тягового двигателя от частоты вращения его вала, участок А8B8), а вращающий момент на валу асинхронного тягового двигателя МАД изменяется от 6367 до 2623 Нм при значении пускового вращающего момента МАДп=8000 Нм.
Для дальнейшего увеличения частоты вращения вала асинхронного тягового двигателя nАД (скорости движения тягового транспортного средства) асинхронный тяговый двигатель отключается от синхронного тягового генератора, и рукоятка контроллера машиниста переводится в положение Пк=VI. В результате этого частота вращения вала энергетической установки nДГ уменьшается до 550 об/мин (а не до 300 об/мин, т.е. только на 45%, а не на 70-80%, как в известных передачах), а частота питающего напряжения f1 уменьшается до 27,5 Гц. Так как время переходного процесса в автоматической системе регулирования частоты вращения вала энергетической установки на 2 порядка меньше, чем постоянная времени поезда, характеризующая его инерционность [Луков Н.М. Автоматизация тепловозов, газотурбовозов и дизель-поездов. - М.: Машиностроение, 1988. - С.37, 225], то переключение обмоток асинхронного тягового двигателя практически не влияет на тяговые свойства тягового транспортного средства с предлагаемой электрической передачей мощности переменного тока. Электрическая передача мощности переменного тока отличается от известных также более высоким кпд, большей надежностью и меньшей стоимостью, так как не содержит между синхронным тяговым генератором и асинхронным тяговым двигателем никаких преобразователей энергии (выпрямителей и инверторов).
При Пк=VI обмотка асинхронного тягового двигателя с р2=4 подключается к синхронному тяговому генератору. После чего рукоятка контроллера машиниста снова переводится в положение Пк=XV, частота питающего напряжения f1 увеличивается до 50 Гц, а частота nАД увеличивается до 750 об/мин (линия б7 на фиг.7). При этом фактически реализуется частотное управление асинхронным тяговым двигателем путем ступенчатого изменения частоты питающего напряжения f1 от 27,5 до 50 Гц. Ступени частоты небольшие Δf1=2,5 Гц (то есть равны 5%). При этом мощность асинхронного тягового двигателя РАД изменяется от 103 до 143 кВт (линия е7 на фиг.7; участок B8С8 на фиг.8), а вращающий момент на валу асинхронного тягового двигателя МАД изменяется от 2623 до 1821 Нм.
Для дальнейшего увеличения частоты nАД (скорости движения тягового транспортного средства) асинхронный тяговый двигатель отключается от синхронного тягового генератора и рукоятка контроллера машиниста переводится в положение Пк=VI. При этом частота вращения вала энергетической установки nДГ уменьшается до 550 об/мин (на 45%). При Пк=VI обмотка асинхронного тягового двигателя с р3=2 подключается к синхронному тяговому генератору. После чего рукоятка контроллера машиниста снова переводится в положение Пк=XV, частота питающего напряжения f1 увеличивается до 50 Гц, а частота nАД увеличивается до 1500 об/мин (линия б7 на фиг.7). При этом фактически реализуется частотное управление асинхронным тяговым двигателем путем ступенчатого изменения частоты питающего напряжения f1 от 27,5 до 50 Гц. Ступени частоты небольшие Δf1=2,5 Гц (то есть равны 5%). При этом мощность асинхронного тягового двигателя РАД изменяется от 143 до 223 кВт (линия ж7 на фиг.7, участок C8D8 на фиг.8), а вращающий момент на валу асинхронного тягового двигателя МАД изменяется от 1821 до 1420 Нм.
Для дальнейшего увеличения частоты nАД (скорости движения ν тягового транспортного средства) асинхронный тяговый двигатель отключается от синхронного тягового генератора и рукоятка контроллера машиниста переводится в положение Пк=VI, в результате чего частота вращения вала энергетической установки nДГ уменьшается до 550 об/мин (на 45%). При Пк=VI обмотка асинхронного тягового двигателя с р4=1 подключается к синхронному тяговому генератору. После этого рукоятка контроллера машиниста снова переводится в положение Пк=XV, частота питающего напряжения f1 увеличивается до 50 Гц, а частота nАД увеличивается до 3000 об/мин (линия г7 на фиг.7). При этом фактически реализуется частотное управление асинхронным тяговым двигателем путем ступенчатого изменения частоты питающего напряжения f1 от 27,5 до 50 Гц. Ступени частоты небольшие Δf1=2,5 Гц (равны 5%). При этом мощность асинхронного тягового двигателя РАД изменяется от 223 до 383 кВт (линия з7 на фиг.7, участок D8E8 на фиг.8), а вращающий момент на валу асинхронного тягового двигателя МАД изменяется от 1420 до 1219 Нм.
Зависимости относительной мощности синхронного тягового генератора PГо (асинхронного тягового двигателя РАДо) (линии д7÷з7 на фиг.7) описываются выражением

где коэффициент kp имеет значения 1,0·10-4 при р1=8; 2·10-4 при р2=4; 4,2·10-4 при р2=2; 8,4·10-4 при p4=1; АР=0,167.
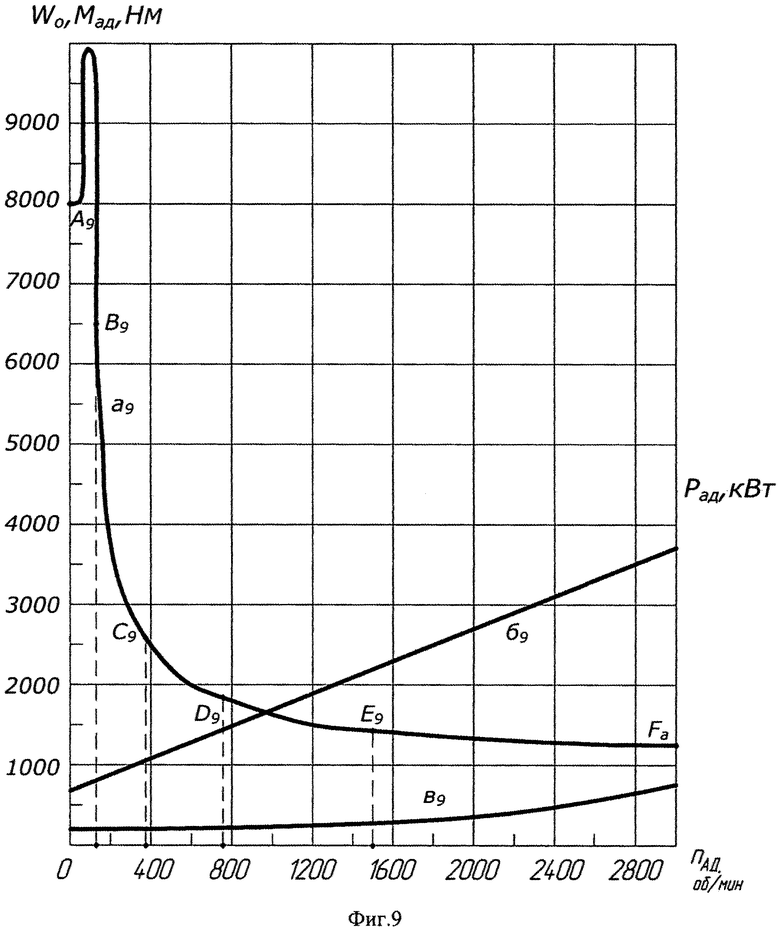
Из таблицы 3 видно также, что в результате изменения частоты вращения вала энергетической установки nДГ в полном диапазоне (от 300 до 1000 об/мин) и изменения числа пар полюсов (от 8 до 1) изменяется синхронная частота вращения вала асинхронного тягового двигателя nАД в широком диапазоне (от 112,5 до 3000 об/мин), то есть в 26,7 раза (см. фиг.9. Зависимости силы основного сопротивления движению Wо (линия а 9), вращающего момента на валу асинхронного тягового двигателя МАД (касательной силы тяги F1 тягового транспортного средства) (линия б9) и мощности асинхронного тягового двигателя РАД (линия в9) от частоты вращения его вала nАД (скорости движения ν тягового транспортного средства) (тяговые характеристики тягового транспортного средства)). При этом касательная сила тяги тягового транспортного средства при МАД=8000 Нм при Пк=I и МАД=1219 Нм при Пк=15 (при номинальной мощности) изменяется в 6,6 раза (8000 Нм/1219 Нм). У пассажирского тепловоза ТЭП70 скоростной диапазон равен 8 (160/20 км/ч), а сила тяги при этом изменяется в 5,5 раз [Пассажирский тепловоз ТЭП70. М.: Транспорт, 1976. Авт.: В.Г. Быков, Б.Н. Морошкин, Г.Е. Серделевич, Ю.В. Хлебников, В.М. Ширяев. Стр. 18]. Таким образом, предлагаемая электрическая передача мощности переменного тока тягового транспортного средства с микропроцессорной системой управления, имея большие диапазоны изменения скорости движения и касательной силы тяги, может быть успешно применена на тепловозе.
Коэффициент усиления предлагаемой электрической передачи мощности переменного тока по частоте вращения вала kν=ΔnАД/ΔnДГ имеет разные значения при разных р. Так, при p1=8 kν1=ΔnАД/ΔnДГ=262,5/700=0,375; при р2=4 kν2=337,5/450=0,75; при р3=2 kν3=675/450=1,50; при р4=1 kν4=1350/450=3,0. Отношение максимального и минимального значений коэффициента усиления kν4/kν1 составляет 3,0/0,375=8.
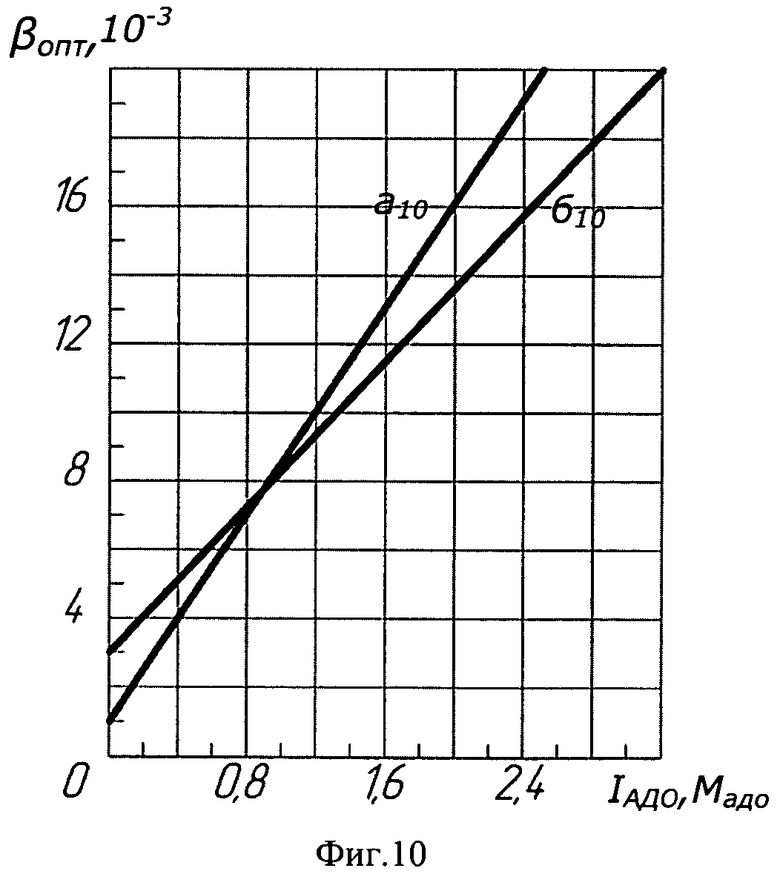
Оптимальными при установившихся режимах системами управления асинхронными двигателями являются такие, которые обеспечивают минимальное значение полных потерь асинхронного тягового двигателя или максимальное значение произведения его кпд и коэффициента мощности. Максимальное значение кпд асинхронный тяговый двигатель имеет при некоторой частоте тока ротора (или абсолютного скольжения β=f2/f1ном). Оптимальное значение абсолютного скольжения βопт асинхронного тягового двигателя является функцией его нагрузки, и оно практически линейно зависит от тока и момента на валу асинхронного тягового двигателя (см. фиг.10. Зависимости абсолютного скольжения βопт асинхронного тягового двигателя от относительного тока нагрузки IАДо (линия а 10) и относительного вращающего момента на валу асинхронного двигателя МАДо (линия б10)) [Винокуров В.А., Попов Д.А. Электрические машины железнодорожного транспорта. - М.: Транспорт, 1986. С.380]. При IАДо=2,5 βопт=18·10-3 (фиг.10) и при Пк=VII при f1=30 Гц и р2=4 абсолютное скольжение ротора двигателя составляет 0,9 Гц, частота вращения вала асинхронного тягового двигателя составляет 29,1 Гц.
При принятой последовательности подключения обмоток в режиме разгона увеличение скорости движения тягового транспортного средства с электрической передачей мощности переменного тока с микропроцессорной системой управлением при Пк=I осуществляется за счет уменьшения скольжения s асинхронного тягового двигателя до номинального значения.
В соответствии с зависимостью (8) асинхронный тяговый двигатель должен развивать мощность, пропорциональную частоте вращения его вала или частоте питающего напряжения f1.
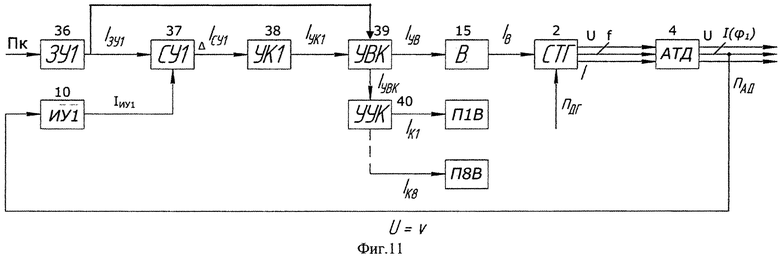
Взаимодействие элементов электрической передачи мощности переменного тока тягового транспортного средства с микропроцессорной системой управления видно из функциональных схем (см. фиг.11. Функциональная схема системы управления электрической передачей мощности переменного тока тягового транспортного средства с микропроцессорной системой управления по первому каналу управления при U≡ν).
Электрическая передача мощности переменного тока тягового транспортного средства с микропроцессорной системой управления работает следующим образом (фиг.3). Передача включается при Пк=0, а при переводе рукоятки контроллера машиниста 13 в положение Пк=1 в обмотку возбуждения синхронного тягового генератора 2 подается ток возбуждения IB от возбудителя 75. Напряжение генератора U, подведенное к обмоткам с р1=8 асинхронного тягового двигателя 4, включенного при Пк=1 посредством коммутаторов П1В÷П8В, начинает увеличиваться под воздействием сигналов nДГ(Пк) и тока IB по каналам (фиг.11): задающее устройство первое ЗУ1 (поз.36), сравнивающее устройство первое СУ1 (поз.37), устройство коррекции коэффициента усиления канала первое УК1 (поз.38), устройство выбора канала управления УВК (поз.39), возбудитель В (поз.15), синхронный тяговый генератор СТГ (поз.2) и датчик тока синхронного тягового генератора, выполняющий функции измерительного устройства первого ИУ1 (поз.10), далее СУ1, УК1, УВК, В, СТГ. Благодаря действию этих каналов ток синхронного тягового генератора I (выполняющего функции объекта регулирования тока (ОРТ) и объекта регулирования напряжения (ОРН)) и асинхронного тягового двигателя (первая регулируемая величина φ1) поддерживается постоянным, равным заданному значению IЗ, при этом выходной сигнал СУ1 ΔIСУ1=IЗ-IИУ1. Если ΔIСУ1<0, то ток возбуждения возбудителя IУВ уменьшается и уменьшается ток асинхронного тягового двигателя за счет уменьшения напряжения U синхронного тягового генератора. Если ΔIСУ1>0, то ток возбуждения возбудителя IУВ увеличивается и увеличивается ток асинхронного тягового двигателя за счет увеличения напряжения U синхронного тягового генератора. Функциональные элементы ИУ1, СУ1, УК1, УВК, В и СТГ (ОРТ) образуют замкнутый контур автоматической системы регулирования (стабилизации) тока синхронного тягового генератора и асинхронного тягового двигателя, устойчивость и показатели качества работы которой определяются значением коэффициента усиления этой системы в разомкнутом состоянии kPC1=kИУ1·kСУ1·kУК1·kУВК·kВ·kОРТ [Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989. С.12, 13, 95-98]. Значение коэффициента передачи kPC1 изменяется в широких пределах при изменении режимов работы возбудителя и синхронного тягового генератора, так как их статические характеристики IВ(IУВ) и U(IВ) существенно нелинейны [Патент РФ №2290329. Опубл. 27.12.2006]. Для настройки этой системы регулирования путем стабилизации коэффициента усиления kPC1 применено устройство коррекции коэффициента усиления канала первое УК1. Его статическая характеристика выбирается такой, чтобы коэффициент усиления kPC1 имел постоянное значение при всех режимах работы системы [Теория автоматического управления. Ч.II. Теория нелинейных и специальных систем автоматического управления. Под ред. А.А. Воронова. - М.: Высш. школа, 1977. С.4, 5], [Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, 1995. С.152]. Выходной сигнал ЗУ1 IЗУ1 воздействует также через УВК на устройство управления коммутаторами УУК (поз.40 на фиг.11) и приводит к включению (на Пк=1) коммутаторов П1В÷П8В, которые подключают к синхронному тяговому генератору обмотку асинхронного тягового двигателя с числом пар полюсов 8. Постоянство вращающего момента на валу асинхронного тягового двигателя равносильно также условию I=const. В течение времени разгона тягового транспортного средства ток статора остается неизменным и обеспечивается условие F1/F2=1, то есть выполняется условие (3) U1/U2=ν1/ν2. Для сохранения условия I=const в процессе разгона тягового транспортного средства и обеспечения оптимальных показателей работы асинхронного тягового двигателя напряжение, приложенное к обмотке статора асинхронного тягового двигателя, повышается пропорционально скорости движения тягового транспортного средства: U≡ν. Таким образом, разгон тягового транспортного средства осуществляется при постоянстве касательной силы тяги, то есть при М=const.
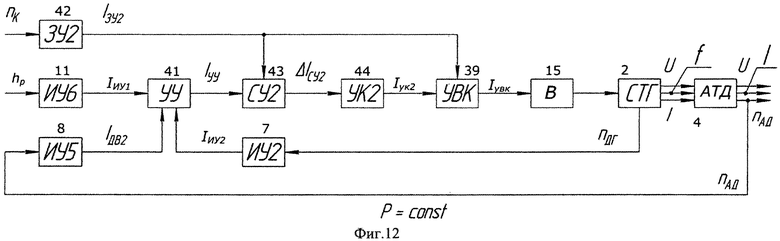
Скорость движения тягового транспортного средства ν увеличивается до значения, при котором начинает полностью использоваться мощность теплового двигателя, заданная на каждом положении рукоятки контроллера машиниста Пк. При этом выходной сигнал датчика перемещения элементов органов топливоподачи (измерительного устройства шестого ИУ6) IИУ6 препятствует перегрузке теплового двигателя (см. фиг.12. Функциональная схема системы управления электрической передачей мощности переменного тока тягового транспортного средства с микропроцессорной системой управления по второму каналу управления при Р=const). На вход устройства умножения УУ (поз.41 на фиг.12) подаются выходные сигналы датчика перемещения элементов органов топливоподачи IИУ6, датчика частоты вращения вала энергетической установки (второй регулируемой величины φ2), выполняющего функции измерительного устройства второго ИУ2, IИУ2 и датчика частоты вращения вала асинхронного тягового двигателя, выполняющего функции измерительного устройства пятого ИУ5, IИУ5. Произведение сигналов IИУ6 и IИУ2 эквивалентно мощности теплового двигателя и, с учетом определенных условий, мощности синхронного тягового генератора и асинхронного тягового двигателя. Сигнал IИУ5 является третьим множителем и изменяет произведение сигналов IИУ5, IИУ6 и IИУ2 с учетом порядка подключения обмоток асинхронного тягового двигателя к синхронному тяговому генератору с условием, чтобы мощность асинхронного тягового двигателя всегда поддерживалась пропорциональной частоте вращения его вала nАД. В результате выходной сигнал устройства умножения УУ IУУ эквивалентен текущей мощности асинхронного тягового двигателя РАДт. Выходной сигнал задающего устройства второго ЗУ2 (поз.42 на фиг.12) IЗУ2 эквивалентен заданной мощности асинхронного тягового двигателя РАДз. Если РАДз-PАДт>0, то асинхронный тяговый двигатель недогружен и выходной сигнал сравнивающего устройства второго СУ2 (поз.43 на фиг.12) ΔIСУ2=-IЗУ2-IУУ>0, что приводит к увеличению напряжения U и мощности синхронного тягового генератора и асинхронного тягового двигателя [Луков Н.М., Стрекопытов В.В., Рудая К.И. Передачи мощности тепловозов / Под ред. Н.М. Лукова. - М.: транспорт, 1987, с.74-83]. На фиг.13 позиции 44 соответствует устройство коррекции коэффициента усиления канала второе.
После окончания разгона тягового транспортного средства (точка С9 на фиг.9) дальнейшее увеличение скорости движения тягового транспортного средства ν осуществляется путем отключения от синхронного тягового генератора обмотки асинхронного тягового двигателя с числом пар полюсов р1=8, уменьшения Пк до VI и подключения к синхронному тяговому генератору обмоток асинхронного тягового двигателя с числом пар полюсов р2=4.
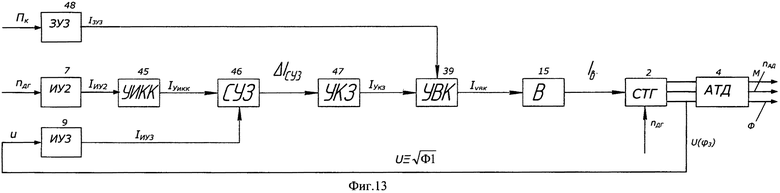
Работа асинхронного тягового двигателя при подключенных к синхронному тяговому генератору обмотках с числом пар полюсов 8, 4, 2 и 1 осуществляется при мощности синхронного тягового генератора и асинхронного тягового двигателя, пропорциональной частоте вращения вала асинхронного тягового двигателя при постоянстве мощности при каждом положении рукоятки контроллера машиниста Пк. Для обеспечения условия постоянства мощности асинхронного тягового двигателя автоматическая система регулирования напряжения тягового синхронного генератора должна изменять напряжение на его статорной обмотке пропорционально корню квадратному из его частоты f1, которая пропорциональна частоте вращения вала энергетической установки nДГ: 

Благодаря действию каналов ИУ2, УИКК, СУ3, УК3, УВК, В, СТГ (ОРН) и ИУ3, СУ3, УК3, УВК, В, СТГ (ОРН), напряжение синхронного тягового генератора поддерживается пропорциональным значению сигнала IКК, то есть корню квадратному из частоты 
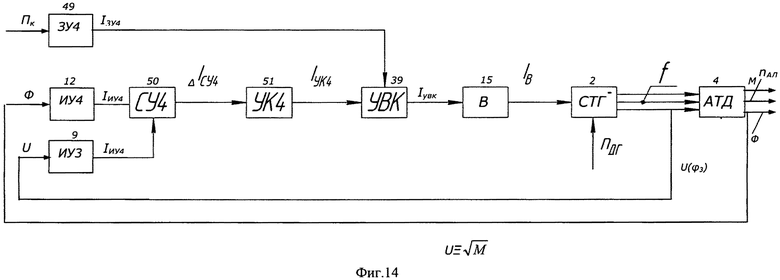
В режиме, когда электрическая передача мощности тягового транспортного средства работает при постоянной скорости движения тягового транспортного средства ν, для обеспечения постоянства скорости движения напряжение синхронного тягового генератора U необходимо изменять пропорционально корню квадратному из касательной силы тяги F или момента М: 


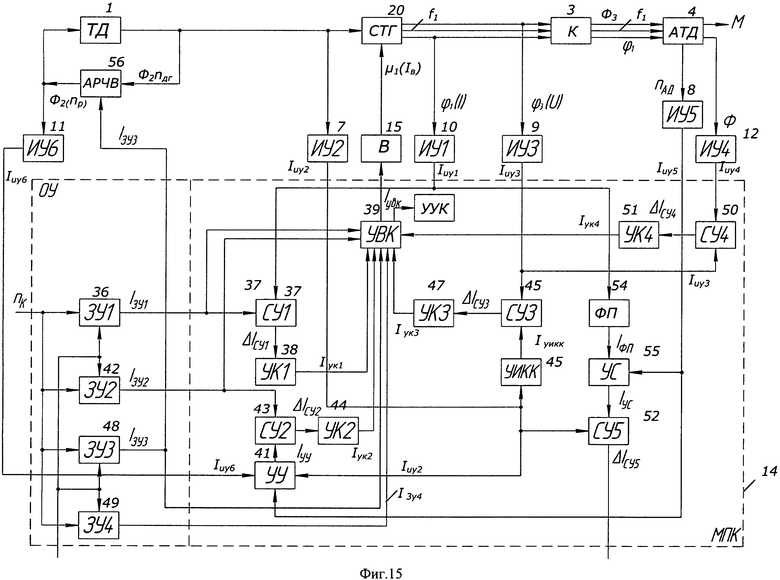
Из функциональных схем, представленных на фиг.11÷14, образуется полная функциональная схема автоматической системы регулирования частоты вращения вала энергетической установки и электрической передачи мощности переменного тока тягового транспортного средства с микропроцессорной системой управления (см. фиг.15. Функциональная схема автоматической системы регулирования частоты вращения вала энергетической установки и электрической передачи мощности переменного тока тягового транспортного средства с микропроцессорной системой управления). Предлагаемая электрическая передача мощности переменного тока тягового транспортного средства с микропроцессорной системой управления содержит следующие функциональные элементы: тепловой двигатель и синхронный тяговый генератор, выполняющие функции объекта регулирования частоты вращения вала; возбудитель тягового синхронного генератора, коммутаторы ПВ1÷ПВ8 и ПН1÷ПН8, выполняющие функции исполнительно-регулирующего устройства; устройство управления контакторами, выполняющее функции управляющего органа, асинхронный тяговый двигатель, выполняющий функции исполнительного механизма; датчик перемещения элементов органов топливоподачи, датчик частоты вращения вала энергетической установки, датчик частоты вращения вала асинхронного тягового двигателя, датчик тока синхронного тягового генератора, датчик напряжения синхронного тягового генератора, датчик магнитного потока асинхронного тягового двигателя; орган управления тяговым транспортным средством и микропроцессорный контроллер. Микропроцессорный контроллер содержит следующие функциональные элементы: сравнивающие устройства СУ1÷СУ5, устройства коррекции коэффициентов усиления каналов управления УК1÷УК4, устройство умножения УУ, устройство извлечения квадратного корня УИКК, функциональный преобразователь ФП, устройство алгебраического суммирования УС и устройство выбора каналов управления УВК.
Выходной сигнал функционального преобразователя ФП IФП пропорционален току асинхронного тягового двигателя и соответствует заданному значению абсолютного скольжения βОПТ (фиг.10). В устройстве алгебраического суммирования УС суммируются выходные сигналы функционального преобразователя ФП IФП и измерительного устройства пятого ИУ5 IИУ5. Сигнал IИУ5 пропорционален асинхронной частоте вращения вала двигателя nАД. В результате выходной сигнал устройства алгебраического суммирования УС IУС пропорционален сумме частоты вращения вала асинхронного тягового двигателя и заданного абсолютного скольжения βОПТ. В сравнивающем устройстве СУ5 выходной сигнал устройства алгебраического суммирования УС IУС сравнивается с выходным сигналом устройства ИУ2 IИУ2, который соответствует текущему значению частоты питающего напряжения синхронного тягового генератора f1. Сигнал IИУ2 пропорционален синхронной частоте вращения вала асинхронного тягового двигателя nАДс. Если IУС-IИУ2=IСУ5>0, то под действием этого сигнала, подаваемого в устройства ЗУ1÷ЗУ4, входящие в орган управления, уменьшается частота вращения вала энергетической установки nДГ и частота питающего напряжения синхронного тягового генератора f1. Если IУС-IИУ2=IСУ5<0, то под действием этого сигнала, подаваемого в устройства ЗУ1÷ЗУ4, увеличивается частота вращения вала энергетической установки nДГ и частота питающего напряжения синхронного тягового генератора f1. В результате абсолютное скольжение двигателя β поддерживается равным заданному значению βОПТ (рис.9).
Технический результат, который может быть получен при осуществлении предлагаемого изобретения
Переключение полюсов асинхронного тягового двигателя в предлагаемой электрической передаче мощности переменного тока тягового транспортного средства с микропроцессорной системой управления не приводит в процессе переключения к броскам тока и вращающего момента на валу в начале и конце такого переключения. В электрической передаче мощности переменного тока тягового транспортного средства с микропроцессорной системой управления применена бесконтактная коммутационная аппаратура, которая имеет небольшой вес и высокую надежность. Для осуществления увеличения скорости движения тягового транспортного средства после переключения полюсов частота вращения вала энергетической установки уменьшается не до минимального значения (на 70-80% от ее номинального значения), а только на 45% от ее номинального значения. Таким образом, в электрической передаче мощности переменного тока тягового транспортного средства с микропроцессорной системой управления частота вращения вала энергетической установки изменяется не в полном диапазоне при каждом переключении числа полюсов полюсопереключаемых обмоток асинхронного тягового двигателя, а в два раза меньшем диапазоне. То есть при этом энергетическая установка в два раза меньше времени работает при переходных процессах. Таким образом, значительное уменьшение продолжительности переходных процессов повышает среднеэксплуатационный кпд энергетической установки тягового транспортного средства, повышает ее долговечность и надежность. Так как время переходного процесса в автоматической системе регулирования частоты вращения вала энергетической установки на 2 порядка меньше, чем постоянная времени поезда, характеризующая его инерционность, то переключение обмоток асинхронного тягового двигателя практически не влияет на тяговые свойства тягового транспортного средства с предлагаемой передачей. Предлагаемая электрическая передача мощности переменного тока тягового транспортного средства с микропроцессорной системой управления отличается от известных также более высоким кпд и меньшей стоимостью, так как не содержит между синхронным тяговым генератором и асинхронным тяговым двигателем никаких преобразователей энергии (выпрямителей и инверторов).
Технический результат достигается за счет того, что электрическая передача мощности переменного тока тягового транспортного средства с микропроцессорной системой управления, содержащая синхронный тяговый генератор, возбудитель синхронного тягового генератора, вал последнего соединен с валом теплового двигателя, автоматический регулятор частоты вращения вала теплового двигателя, тепловой двигатель с синхронным тяговым генератором образуют энергетическую установку, многоскоростной асинхронный тяговый двигатель с короткозамкнутым ротором, вал которого соединен с осью движущей колесной пары тягового транспортного средства, статорная полюсопереключаемая обмотка асинхронного тягового двигателя подключается к статорной обмотке синхронного тягового генератора посредством коммутаторов, датчик тока синхронного тягового генератора, датчик напряжения синхронного тягового генератора, датчик частоты вращения вала энергетической установки, датчик магнитного потока асинхронного тягового двигателя, датчик частоты вращения вала асинхронного тягового двигателя, датчик перемещения элементов органов топливоподачи теплового двигателя, орган управления тяговым транспортным средством, отличается тем, что орган управления тяговым транспортным средством содержит четыре задающих устройства, а в электрической передаче тягового транспортного средства дополнительно содержатся пять сравнивающих устройств, четыре устройства коррекции коэффициентов передачи каналов управления, устройство извлечения квадратного корня из частоты вращения вала энергетической установки, устройство умножения выходных сигналов датчика перемещения элементов органа топливоподачи теплового двигателя, датчика частоты вращения вала энергетической установки и датчика частоты вращения вала асинхронного тягового двигателя, функциональный преобразователь, устройство алгебраического суммирования, устройство выбора каналов управления, устройство управления коммутаторами, причем устройство выбора каналов управления связано с задающими устройствами первым, вторым, третьим и четвертым, с возбудителем синхронного тягового генератора, устройством управления коммутаторами, устройствами коррекции коэффициентов передачи каналов управления первым, вторым, третьим и четвертым; сравнивающее устройство первое связано с задающим устройством первым, датчиком тока синхронного тягового генератора и устройством коррекции коэффициента передачи канала управления первым; сравнивающее устройство второе связано с задающим устройством вторым, устройством умножения выходных сигналов датчика перемещения элементов органа топливоподачи теплового двигателя, датчика частоты вращения вала энергетической установки и датчика частоты вращения вала асинхронного тягового двигателя и устройством коррекции коэффициента передачи канала управления вторым; сравнивающее устройство третье связано с датчиком напряжения синхронного тягового генератора, устройством извлечения квадратного корня из частоты вращения вала энергетической установки и устройством коррекции коэффициента передачи канала управления третьим; четвертое сравнивающее устройство связано с датчиком магнитного потока асинхронного тягового двигателя, датчиком напряжения синхронного тягового генератора и устройством коррекции коэффициента передачи канала управления четвертым; сравнивающее устройство пятое связано с датчиком частоты вращения вала энергетической установки, устройством алгебраического суммирования и задающими устройствами первым, вторым, третьим и четвертым; устройство алгебраического суммирования связано с датчиком частоты вращения вала асинхронного тягового двигателя и функциональным преобразователем, функциональный преобразователь связан с датчиком тока синхронного тягового генератора; автоматический регулятор частоты вращения вала энергетической установки связан с задающим устройством третьим.
Перечень фигур
Фиг.1. Зависимость мощности тягового транспортного средства от скорости его движения, νA - скорость движения тягового транспортного средства при выходе на постоянную мощность, νK - конструкционная скорость тягового транспортного средства: линия а 1-F=const; линия б1-Р=const (F=P/ν); линия в1-ν=const.
Фиг.2. Характеристика сопротивления движению тягового транспортного средства W(ν) (линия а 2) и механические характеристики асинхронного тягового двигателя при разгоне тягового транспортного средства: линия б2 - при частоте 30 Гц; линия в2 - 32,5 Гц; линия г2 - 35 Гц; линии д2÷ж2 - при переменных частоте и напряжении.
Фиг.3. Принципиальная схема электрической передачи мощности переменного тока тягового транспортного средства с микропроцессорной системой управления.
Фиг.4. Принципиальная схема трехфазного тиристорного коммутатора.
Фиг.5 Принципиальная схема системы управления двигателем путем переключения полюсов.
Фиг.6. Характеристики: а 6, б6 - момент сопротивления нагрузки; в6, г6 - механические асинхронного тягового двигателя при номинальном Uном и минимальном Uмин напряжении соответственно; д6 - статическая замкнутой автоматической системы регулирования частоты вращения вала асинхронного тягового двигателя.
Фиг.7. Зависимости частоты вращения вала асинхронного тягового двигателя nАД (скорости движения тягового транспортного средства) (линия а 7 при р1=8, линия б7 при р2=4, линия в7 при р3=2, линия г7 при р4=1) и относительной мощности синхронного тягового генератора PГо (линия д7 при р1=8, линия e7 при р2=4, линия при р3=2, линия з7 при р4=1) от частоты вращения вала энергетической установки nДГ.
Фиг.8. Зависимость мощности асинхронного тягового двигателя от частоты вращения его вала.
Фиг.9. Зависимости силы основного сопротивления движению Wо (линия а 9), вращающего момента на валу асинхронного тягового двигателя МАД (силы тяги F1 тягового транспортного средства) (линия б9) и мощности асинхронного тягового двигателя РАД (линия в9) от частоты вращения его вала nАД (скорости движения ν тягового транспортного средства) (тяговые характеристики тягового транспортного средства).
Фиг.10. Зависимости абсолютного скольжения βопт асинхронного тягового двигателя от относительного тока нагрузки IАДо (линия a 10) и вращающего момента на валу асинхронного двигателя МАДо (линия б10).
Фиг.11. Функциональная схема системы управления электрической передачей мощности переменного тока тягового транспортного средства с микропроцессорной системой управления по первому каналу управления при U≡ν.
Фиг.12. Функциональная схема системы управления электрической передачей мощности переменного тока тягового транспортного средства с микропроцессорной системой управления по второму каналу управления при Р=const.
Фиг.13. Функциональная схема системы управления электрической передачей мощности переменного тока тягового транспортного средства с микропроцессорной системой управления при реализации зависимости 
Фиг.14. Функциональная схема системы управления электрической передачей мощности переменного тока тягового транспортного средства с микропроцессорной системой управления по каналу реализации зависимости 
Фиг.15. Функциональная схема автоматической системы регулирования частоты вращения вала энергетической установки и электрической передачи мощности переменного тока тягового транспортного средства с микропроцессорной системой управления.
Перечень позиций на фигурах и соответствующие им элементы
1 - тепловой двигатель
2 - синхронный тяговый генератор
3 - тиристорный коммутатор
4 - асинхронный тяговый двигатель
5 - ось
6 - движущая колесная пара
7 - датчик частоты вращения вала энергетической установки, измерительное устройство второе
8 - датчик частоты вращения вала асинхронного тягового двигателя, измерительное устройство пятое
9 - датчик напряжения синхронного тягового генератора, измерительное устройство третье
10 - датчик тока синхронного тягового генератора, измерительное устройство первое
11 - датчик перемещения элементов органов топливоподачи, измерительное устройство шестое
12 - датчик магнитного потока асинхронного тягового двигателя, измерительное устройство четвертое
13 - орган управления тяговым транспортным средством (бесступенчатый контроллер машиниста)
14 - микропроцессорный контроллер
15 - возбудитель синхронного тягового генератора
16÷24 - диоды
25÷27 - силовые тиристоры
28÷30 - силовые диоды
31 - стабилитрон
32÷34 - резисторы
35 - управляющий ключ
36 - задающее устройство первое
37 - сравнивающее устройство первое
38 - устройство коррекции коэффициента передачи канала первое
39 - устройство выбора канала управления
40 - устройство управления коммутаторами
41 - устройство умножения
42 - задающее устройство второе
43 - сравнивающее устройство второе
44 - устройство коррекции коэффициента усиления канала второе
45 - устройство извлечения корня квадратного
46 - сравнивающее устройство третье
47 - устройство коррекции коэффициента усиления канала третье
48 - задающее устройство третье
49 - задающее устройство четвертое
50 - сравнивающее устройство четвертое
51 - устройство коррекции коэффициента усиления канала четвертое
52 - сравнивающее устройство пятое
53 - задающее устройство пятое
54 - функциональный преобразователь
55 - устройство алгебраического суммирования
Перечень условных сокращений
АРЧВ - автоматический регулятор частоты вращения вала энергетической установки
АТД - асинхронный тяговый двигатель
В - возбудитель синхронного тягового генератора
ЗУ1 - задающее устройство первое
ЗУ2 - задающее устройство второе
ЗУ3 - задающее устройство третье
ЗУ4 - задающее устройство четвертое
ЗУ5 - задающее устройство пятое
ИУ1 - измерительное устройство первое
ИУ2 - измерительное устройство второе
ИУ3 - измерительное устройство третье
ИУ4 - измерительное устройство четвертое
ИУ5 - измерительное устройство пятое
ИУ6 - измерительное устройство шестое
ОРН - объект регулирования напряжения
ОРТ - объект регулирования тока
ОУ - орган управления
Пк - положение рукоятки контроллера машиниста тягового транспортного средства
ТД - тепловой двигатель
СТГ - синхронный тяговый генератор
СУ1 - сравнивающее устройство первое
СУ2 - сравнивающее устройство второе
СУ3 - сравнивающее устройство третье
СУ4 - сравнивающее устройство четвертое
СУ5 - сравнивающее устройство пятое
УК1 - устройство коррекции коэффициента усиления канала первое
УК2 - устройство коррекции коэффициента усиления канала второе
УК3 - устройство коррекции коэффициента усиления канала третье
УВК - устройство выбора канала управления
УИКК - устройство извлечения корня квадратного
УС - устройство алгебраического суммирования
УУК - устройство управления коммутаторами
УУ - устройство умножения
ФП - функциональный преобразователь
Перечень обозначений основных физических величин
β - абсолютное скольжение асинхронного тягового двигателя
βопт - оптимальное значение абсолютного скольжения асинхронного тягового двигателя
φ1 - первая регулируемая величина
φ2 - вторая регулируемая величина
φ3 - третья регулируемая величина
Ф - магнитный поток асинхронного тягового двигателя
F1 - касательная сила тяги тягового транспортного средства
f1 - частота напряжения питания статорных обмоток асинхронного тягового двигателя
f1ном - номинальная частота напряжения питания статорных обмоток асинхронного тягового двигателя
f2 - частота тока обмотки ротора асинхронного тягового двигателя
f2опт - оптимальное значение частоты тока обмотки ротора асинхронного тягового двигателя
fк - критическая частота тока ротора асинхронного тягового двигателя
hp - перемещение элементов органов топливоподачи теплового двигателя
I - ток синхронного тягового генератора
Imax - максимальный ток синхронного тягового генератора
Imin - минимальный ток синхронного тягового генератора
IАДо - относительный ток нагрузки асинхронного тягового двигателя
IВГ - ток возбуждения синхронного тягового генератора
IЗ - заданное значение тока синхронного тягового генератора
I2 - ток ротора асинхронного тягового двигателя, приведенный к цепи статора
IИУ1 - выходной сигнал измерительного устройства первого
IИУ2 - выходной сигнал измерительного устройства второго
IИУ3 - выходной сигнал измерительного устройства третьего
IИУ4 - выходной сигнал измерительного устройства четвертого
IИУ5 - выходной сигнал измерительного устройства пятого
IИУ6 - выходной сигнал измерительного устройства шестого
IУВ - ток возбуждения возбудителя
IВ - ток возбуждения синхронного тягового генератора
IЗУ1 - выходной сигнал задающего устройства первого
IЗУ2 - выходной сигнал задающего устройства второго
IЗУ3 - выходной сигнал задающего устройства третьего
IЗУ4 - выходной сигнал задающего устройства четвертого
IЗУ5 - выходной сигнал задающего устройства пятого
IУС - выходной сигнал устройства алгебраического суммирования
IФП - выходной сигнал функционального преобразователя
ΔIСУ1 - выходной сигнал сравнивающего устройства первого
ΔIСУ2 - выходной сигнал сравнивающего устройства второго
ΔIСУ3 - выходной сигнал сравнивающего устройства третьего
ΔIСУ4 - выходной сигнал сравнивающего устройства четвертого
ΔIСУ5 - выходной сигнал сравнивающего устройства пятого
kРС1 - коэффициент усиления автоматической системы регулирования тока синхронного тягового генератора в разомкнутом состоянии
kν - коэффициент усиления электрической передачи мощности переменного тока по частоте вращения вала
kИУ1 - коэффициент усиления измерительного устройства первого
kСУ1 - коэффициент усиления сравнивающего устройства первого
kУВК - коэффициент усиления устройства выбора канала управления
kВ - коэффициент усиления возбудителя
kОРТ - коэффициент усиления объекта регулирования тока
МАД - вращающий момент на валу асинхронного тягового двигателя
МАДо - относительный вращающий момент на валу асинхронного тягового двигателя
МАДп - пусковой вращающий момент на валу асинхронного тягового двигателя
Mmax - максимально допустимый вращающий момент на валу асинхронного тягового двигателя
Mnom - номинальный вращающий момент на валу асинхронного тягового двигателя
nАД - частота вращения вала асинхронного тягового двигателя
nАДс - синхронная частота вращения вала асинхронного тягового двигателя
nАДз - заданное значение частоты вращения вала асинхронного тягового двигателя
nАДопт - оптимальное значение частоты вращения вала асинхронного тягового двигателя
nАДном - номинальное значение частоты вращения вала асинхронного тягового двигателя
nДГ - частота вращения вала энергетической установки
Р - мощность тягового транспортного средства
РГ - мощность синхронного тягового генератора
PГо - относительная мощность синхронного тягового генератора
РАД - мощность, подводимая к асинхронному тяговому двигателю
s - скольжение асинхронного тягового двигателя
smax - максимальное реализуемое скольжение для асинхронного тягового двигателя
S - число равномерно распределенных катушек, входящих в катушечные группы полюсопереключаемой обмотки асинхронного тягового двигателя
ν1 - скорость движения тягового транспортного средства
U - напряжение питания статорных обмоток асинхронного тягового двигателя, напряжение синхронного тягового генератора
Umax - максимальное напряжение питания статорных обмоток асинхронного тягового двигателя, напряжение синхронного тягового генератора
W - сопротивление движению тягового транспортного средства
Wо - основное сопротивление движению тягового транспортного средства
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическая передача переменного тока тягового транспортного средства с микропроцессорной системой управления | 2019 |
|
RU2729767C1 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2503558C2 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2283247C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2283252C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2501961C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2426895C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2252150C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2369752C2 |
Изобретение относится к электрическим тяговым системам транспортных средств. Электрическая передача переменного тока транспортного средства с микропроцессорной системой управления содержит тепловой двигатель, вал которого соединен с валом трехфазного синхронного генератора. К обмоткам генератора посредством тиристорных коммутаторов подключаются статорные обмотки асинхронного тягового двигателя с короткозамкнутым ротором. Датчик частоты вращения энергетической установки, датчик частоты вращения вала асинхронного тягового двигателя, датчики напряжения и тока синхронного генератора, датчик перемещения элементов органов топливоподачи теплового двигателя, датчик магнитного потока асинхронного двигателя и орган управления тяговым транспортным средством связан с тепловым двигателем и микропроцессорным контроллером. Микропроцессорный контроллер подключен к блоку тиристорных коммутаторов и к возбудителю синхронного генератора. Микропроцессорный контроллер в соответствии с заложенной программой обеспечивает включение и выключение соответствующего числа пар полюсов асинхронного тягового двигателя в зависимости от сигналов органа управления и оборотов вала асинхронного тягового двигателя. Технический результат изобретения заключается в повышении эффективности электрической передачи мощности переменного тока тягового транспортного средства. 4 табл., 15 ил.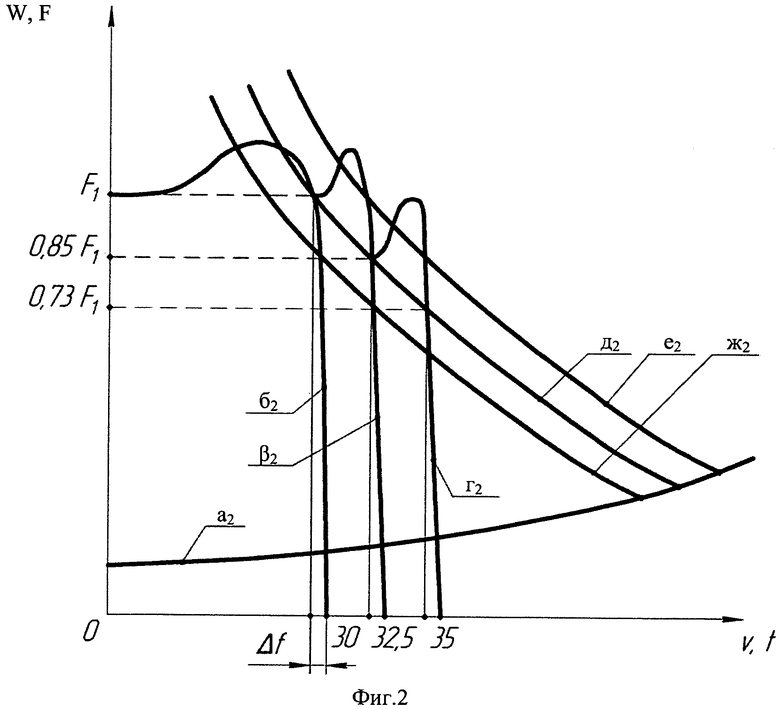
Электрическая передача мощности переменного тока тягового транспортного средства с микропроцессорной системой управления, содержащая синхронный тяговый генератор, возбудитель синхронного тягового генератора, вал последнего соединен с валом теплового двигателя, автоматический регулятор частоты вращения вала теплового двигателя, тепловой двигатель с синхронным тяговым генератором образуют энергетическую установку, многоскоростной асинхронный тяговый двигатель с короткозамкнутым ротором, вал которого соединен с осью движущей колесной пары тягового транспортного средства, статорная полюсопереключаемая обмотка асинхронного тягового двигателя подключается к статорной обмотке синхронного тягового генератора посредством коммутаторов, датчик тока синхронного тягового генератора, датчик напряжения синхронного тягового генератора, датчик частоты вращения вала энергетической установки, датчик магнитного потока асинхронного тягового двигателя, датчик частоты вращения вала асинхронного тягового двигателя, датчик перемещения элементов органов топливоподачи теплового двигателя, орган управления тяговым транспортным средством, отличающаяся тем, что орган управления тяговым транспортным средством содержит четыре задающих устройства, а в электрической передаче тягового транспортного средства дополнительно содержатся пять сравнивающих устройств, четыре устройства коррекции коэффициентов передачи каналов управления, устройство извлечения квадратного корня из частоты вращения вала энергетической установки, устройство умножения выходных сигналов датчика перемещения элементов органа топливоподачи теплового двигателя, датчика частоты вращения вала энергетической установки и датчика частоты вращения вала асинхронного тягового двигателя, функциональный преобразователь, устройство алгебраического суммирования, устройство выбора каналов управления, устройство управления коммутаторами, причем устройство выбора каналов управления связано с задающими устройствами первым, вторым, третьим и четвертым, с возбудителем синхронного тягового генератора, устройством управления коммутаторами, устройствами коррекции коэффициентов передачи каналов управления первым, вторым, третьим и четвертым; сравнивающее устройство первое связано с задающим устройством первым, датчиком тока синхронного тягового генератора и устройством коррекции коэффициента передачи канала управления первым; сравнивающее устройство второе связано с задающим устройством вторым, устройством умножения выходных сигналов датчика перемещения элементов органа топливоподачи теплового двигателя, датчика частоты вращения вала энергетической установки и датчика частоты вращения вала асинхронного тягового двигателя и устройством коррекции коэффициента передачи канала управления вторым; сравнивающее устройство третье связано с датчиком напряжения синхронного тягового генератора, устройством извлечения квадратного корня из частоты вращения вала энергетической установки и устройством коррекции коэффициента передачи канала управления третьим; четвертое сравнивающее устройство связано с датчиком магнитного потока асинхронного тягового двигателя, датчиком напряжения синхронного тягового генератора и устройством коррекции коэффициента передачи канала управления четвертым; сравнивающее устройство пятое связано с датчиком частоты вращения вала энергетической установки, устройством алгебраического суммирования и задающими устройствами первым, вторым, третьим и четвертым; устройство алгебраического суммирования связано с датчиком частоты вращения вала асинхронного тягового двигателя и функциональным преобразователем, функциональный преобразователь связан с датчиком тока синхронного тягового генератора; автоматический регулятор частоты вращения вала энергетической установки связан с задающим устройством третьим.
| АВТОМАТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2290329C1 |
| Устройство для рафинирования жидких металлов и сплавов | 1980 |
|
SU1067070A1 |
| СПОСОБ ПЛАВНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2003 |
|
RU2256285C1 |
| US2013003218 A1, 03.01.2013 | |||
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЕПЛОВОЗА | 2011 |
|
RU2475379C1 |

