Изобретение относится к способу и устройству управления агрегатом, конкретнее уборочным, и может быть использовано при уборке биологического урожая, плодов и ягод.
Известны агрегаты для уборки и режущие аппараты безподпорного резания и косилки с ротационным режущим аппаратом. ( Стоюшкин И.А. Проблемы механизации виноградарства. Орджоникидзе: ИР, 1974, с. 100-150; Теория, конструкция и расчет сельскохозяйственных машин. М.: Машиностроение, 1978, с. 269). Известен режущий аппарат с ножом на цилиндрическом барабане, вращающемся на вертикальной оси с фартуком в форме усеченного конуса. К фартуку на листовых пружинах прикреплены ножи, причем крепление допускает перемещение ножей относительно фартука. Известны гидросистемы для управления орудием, которые могут поднять и опустить орудие. Известен роторный аппарат для уборки биологической массы в виде барабана с гибкими ножами и приводом. Для уборки урожая путем копирования поверхности имеется ранцевое исполнение привода и ручное управление. Известен способ и устройство управления агрегатом с рабочими органами для обработки почвы и ограничителями (а.с. СССР N 251973, кл. А 01 В, 1970). Копирование поверхности требует больших затрат энергии. Известен способ и устройство для кошения трав с ротационным ножом и сложной системой копирования (патент США N 3319407, 1967).
Известен способ и устройство [1], предусматривающий копирование поверхности и включающий цилиндрический барабан, вращающийся вокруг вертикальной оси и несущий отходящий наружу вниз фартук в форме усеченного конуса. К фартуку на листовых пружинах прикреплены ножи, причем крепление допускает перемещение ножей относительно фартука. Эффективность копирования поверхности и лозы ограничена, а управление затруднено, так как всякое ручное управление сопряжено с вероятностью роста напряженности и числа ошибок.
Существенным недостатком известного способа является низкая эффективность управления из-за трудности копирования поверхности лозы и сенокосов, частой поломки рабочего органа в связи с плохой приспособленностью к реальной среде.
Целью изобретения является повышение эффективности управления, обеспечение приспособляемости рабочего органа и агрегата к реальной среде, согласование формы рабочего органа с условиями среды, исключение поломок, копирование препятствий без дорогостоящих следящих систем, снижение энергозатрат на управление и копирование среды, снижение ручного труда, потерь урожая и числа проходов агрегата.
Цель достигается тем, что в качестве регулируемого параметра используют форму рабочего органа, при изменении реакций среды и рельефа поверхности в начале изменяют форму рабочего органа, затем силы управления орудием, при обратном изменении реакций часть энергии регулирования формы рабочего органа и положения орудия утилизируют, в период выполнения технологического процесса в среде с препятствиями реакция среды изменяет форму, кривизну, высоту и положение рабочего органа без затрат энергии на управление. Рабочий орган выполнен в виде упругого гибкого конуса и установлен на поворотном брусе орудия, при этом привод рабочих органов содержит переключатель взаимно противоположного хода и средства сбора материала на поворотном брусе.
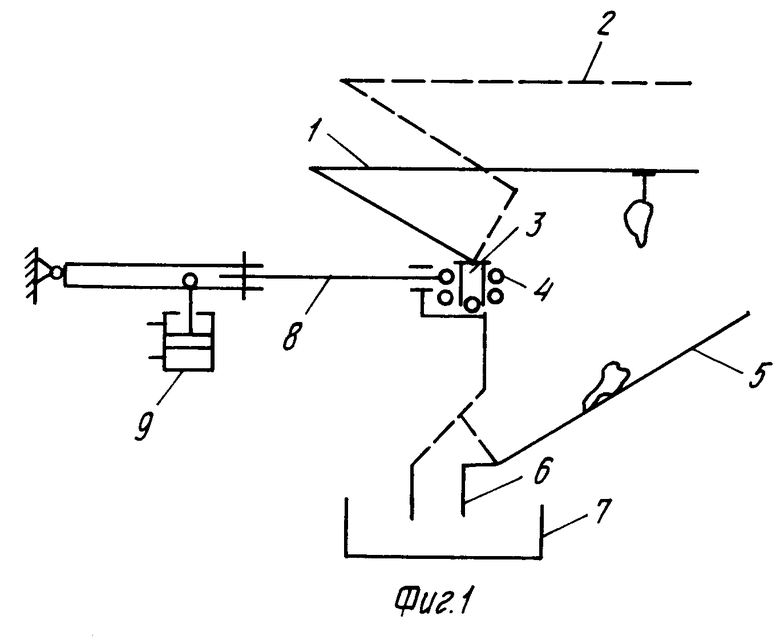
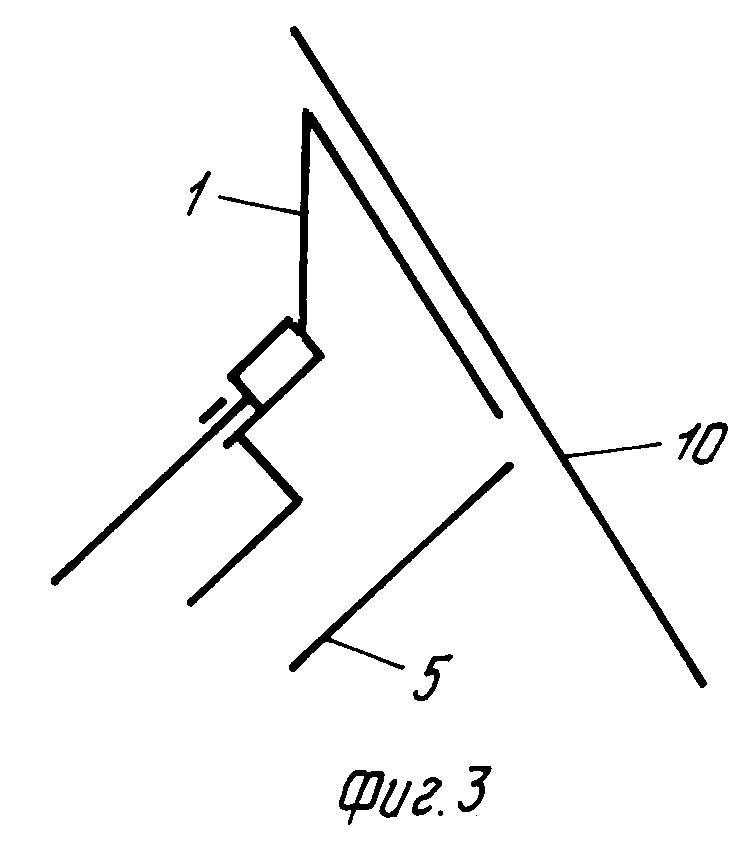
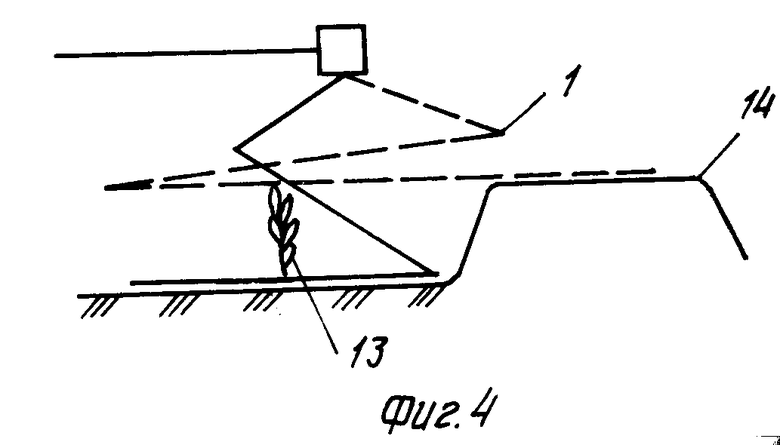
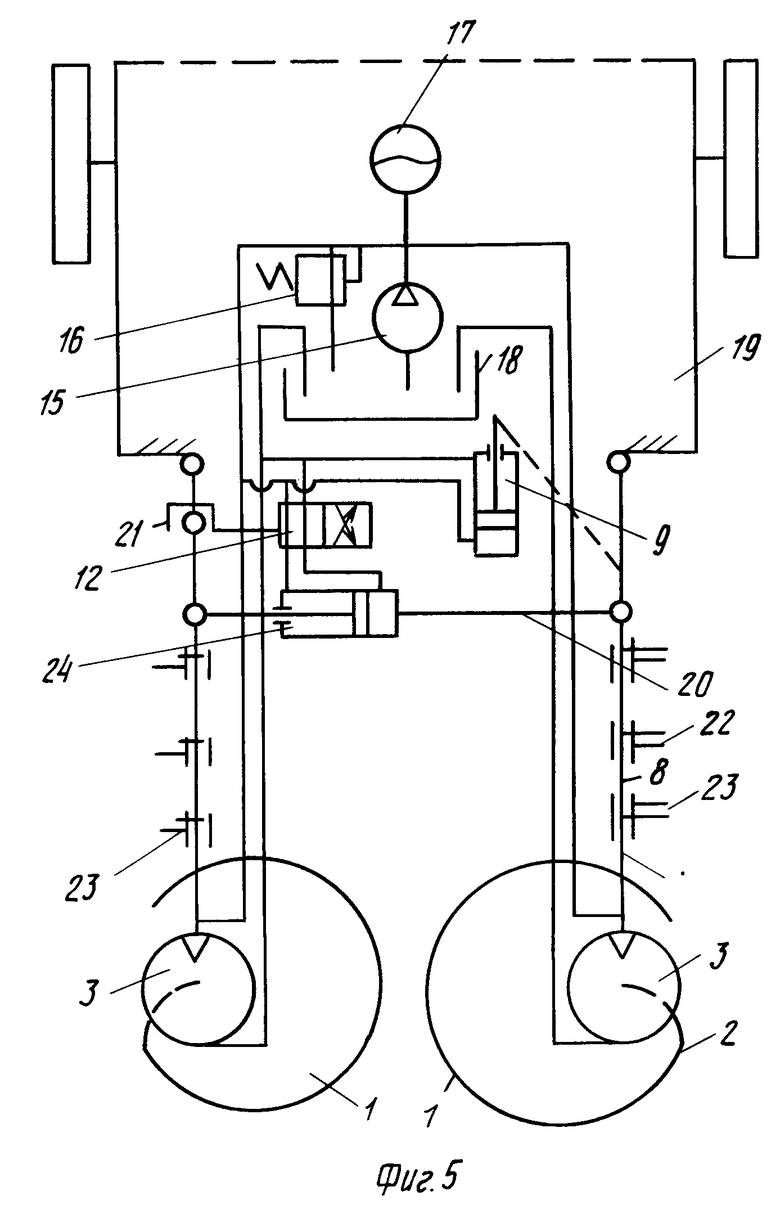
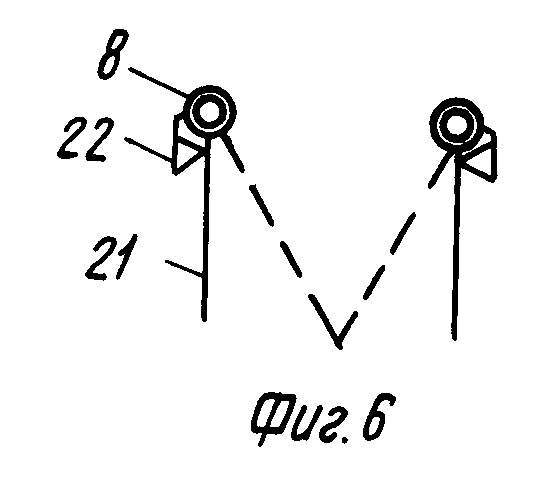
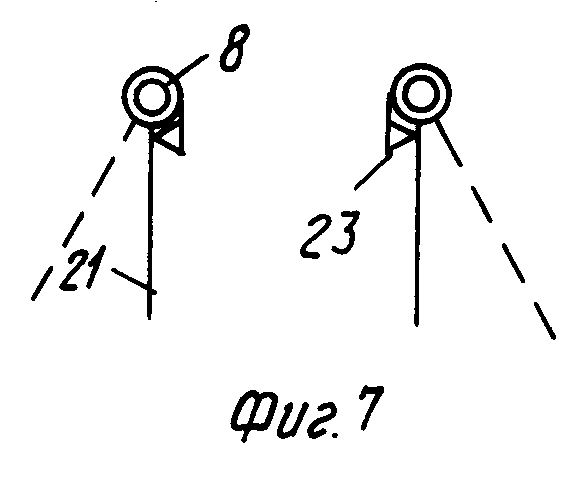
На фиг.1 изображена схема рабочего органа для работы в потолочной плоскости лозы винограда; на фиг.2, 3 - примеры настройки для работы в наклонной плоскости, в верхнем положении, соответствующем выгрузке улавливателя; на фиг.4 - схема работы рабочего органа на поверхности поля с препятствиями; на фиг.5 - схема устройства с двумя рабочими органами взаимно противоположного перемещения; на фиг.6 - схема сбора материала в средней продольной плоскости агрегата; на фиг.7 - схема очистки прохода и сбора материала на границе захвата агрегата.
Устройство управления содержит рабочий орган из упругого гибкого ножа 1 (фиг. 1) в виде упругого гибкого конуса 2, привод 3 которого установлен поворотно и его можно фиксировать фиксатором 4 над улавливателем 5, заканчивающимся рукавом 6 около сменной тары 7, и поворотный брус 8 с гидроцилиндром 9 копирования среды в виде потолочной плоскости лозы плодов и ягод, наклонной поверхности лозы 10 винограда 11 с перемещением улавливателя следящим гидроустройством 12 с возможностью перемещения материала при периодическом подъеме вверх (фиг.3) и копирования поверхности поля при уборке трав 13 с копированием препятствий 14 (фиг.4) и неровной поверхности. Гидравлический вариант привода рабочих органов включает насос 15 (фиг.5), клапан 16, гидроаккумулятор 17, арматуру 18 (бак, трубки, фильтры и т.д.) трактора 19 и тягу 20 взаимно противоположного перемещения рабочих органов в пределах, определяемых конечными переключателями 21 движения брусьев. Для совмещения операций среза и сбора урожая установлены зубья 22 с ограничителями 23 поворота влево или вправо в зависимости от настройки и формирования валика урожая в середине прохода агрегата (фиг.6) или очистки середины и формирование валиков по краям прохода (фиг.7) гидроцилиндром 24.
Гибкая упругая спираль ножа 1 с режущей кромкой на наружной поверхности составляет рабочий орган в виде гибкого упругого конуса 2. Механизм поворота (фиксатор 4) допускает настройку и фиксацию положения для работы в потолочной плоскости, наклонной, вертикальной, горизонтальной и неровной поверхностях среды (лозы, веток, травы, почвы). Следящее гидроустройство 12, перемещая в заданном диапазоне рабочий орган, может определить среду взаимодействия. При уборке плодов рабочий орган (нож 1) тупой внутренней частью может счесывать их с веток при вращении в противоположную сторону и встряхивать гидроцилиндром 9. Копирование стенок и потолков, обеспечение управления рабочим органом без затрат энергии возможно без затрат энергии реакцией среды, изменением формы.
При реализации способа устройство работает следующим образом.
При движении агрегата рабочий орган (нож 1) вращается приводом 3 и наружной режущей кромкой без подпора срезает ножки гроздей винограда 11 или стебли растений (трав 13). Грозди по наклонной поверхности улавливателя 5 и рукаву 6 опускаются в тару 7. При уборке урожая с наклонной лозы 10 (фиг.2, 3) виноград 11 опускается и при подъеме улавливателя до верхнего предела по наклонной поверхности опускается в сменную тару 7. Автоматическое изменение формы рабочего органа (ножа 1) и высоты упруго-гибкого конуса 2 обеспечивает копирование лозы. За пределами такого копирования поверхности рабочий орган перемещается гидроцилиндром 9 управления следящего устройства. В целевом положении рабочий орган удерживается соотношением сил тяжести, подъема, и реакций среды с частичным отбором и возвратом мощности после достижения предела изменения соотношения сил упругости, подъема и тяжести. При встрече с препятствием в виде пней, камней, кочек, неровностей, веток и т.д. реакция среды превышает силу упругости, изменяет форму упругого конуса гибкого ножа (показано на фиг.1, 4 пунктиром). Во вторую очередь вступают во взаимодействие силы регулирования положения орудия следящей системой. В каждом случае изменяют форму рабочего органа при частом и незначительном изменении формы поверхности среды и положения орудия за пределами такого управления. Способ реализуют тем, что в первую очередь изменяют форму, во вторую очередь изменяют положение так, что часть энергии, затраченной на управление, возвращается - утилизируется.
Насос 15 подает жидкость к клапану 16, гидроаккумулятору 17, гидромоторам (приводам 3) для вращения рабочих органов (ножей 1) и в гидроцилиндр 9 для перемещения одного или в гидроцилиндр 24 для взаимно противоположного перемещения в пределах, определяемых конечным переключателем 21 золотника гидроустройства 12. При вращении рабочий орган копирует поверхность за счет высотой гибкости и упругости и режущей кромкой срезает стебли или грозденожки. Гидроцилиндр 24 перемещает рабочие органы к оси, а затем от оси. Давление рабочей жидкости ограничивается клапаном 16 и поддерживается регулятором-гидроаккумулятором 17 в зависимости от сопротивления рабочего органа. При встрече с препятствием 14 или ином повышении сопротивления и давления гидроцилиндр 9 повышает силу и скорость управления и обхода препятствий при копировании среды. Копирование поверхности в первую очередь гибкостью и упругостью рабочего органа, а затем подъемом и опусканием снижает отбор мощности гидросистемой. Рабочий орган (нож 1) при вращении самоочищается, обходя препятствия, самопредохраняется от поломки, а при противоположном вращении собирая среду, счесывая плоды и ягоды, быстро забивается. Управление в таком режиме является прерогативой человека. Возможно применение вибропривода и встряхивание известными средствами.
Каждый поворотный брус 8 перемещает в поперечной плоскости зубья 22 (граблину) и срезанную массу к середине прохода (фиг.6) при установке ограничителей снаружи или очищает середину (фиг.7) и собирает массу на границе захвата агрегата при установке ограничителей 23 внутри (фиг.7). В каждом случае зубья совершают рабочий ход в одну сторону и холостой ход в другую (показано пунктиром). Форму конуса определяют изменением диаметра
dк = n(dп + 1), где dп - диаметр проволоки конуса, сечение ножа в нижней части; n - число витков спирали. Радиус кривизны изменяется в пределах от нуля до положения, определяемого соотношением сил резания и центробежного действия. Другие процессы и средства аналогичны известным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УБОРКИ ПЛОДОВ И ЯГОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2104631C1 |
| АГРЕГАТ | 1995 |
|
RU2101893C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЧВООБРАБАТЫВАЮЩИМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090992C1 |
| СПОСОБ УБОРКИ КАМНЕЙ И ОБРАБОТКИ ПОЧВЫ | 1992 |
|
RU2060614C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ И АГРЕГАТ ДЛЯ ЗЕМЛЕДЕЛИЯ | 1992 |
|
RU2092001C1 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086084C1 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| МАШИНА | 2011 |
|
RU2499720C2 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1996 |
|
RU2170497C2 |

Использование: в сельскохозяйственном машиностроении, в частности в устройствах для сбора урожая трав, ягод и плодов. Сущность изобретения: для повышения эффективности управления агрегатом в нем в качестве регулируемого параметра используют форму рабочего органа. При изменении реакций среды и рельефа поверхности в начале изменяют форму рабочего органа, затем силы управления орудием, при обратном изменении реакций часть энергии регулирования формы рабочего органа и положения утилизируют. Рабочий орган выполнен в виде упругого гибкого конуса и установлен на поворотном брусе орудия. При этом привод рабочих органов содержит переключатель взаимно-противоположного хода и средства сбора материала на поворотном брусе. Возможность изменения диаметра и высоты, приспособляемость рабочего органа и средства сбора материала облегчает работу человека и машины в сложных условиях взаимодействия со средой без больших затрат энергии. 2 с.п. ф-лы, 7 ил.
СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ.
| Патент США N 3662529, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
