Изобретение относится к способу уборки плодов и ягод преимущественно рядовой посадки и устройству для его осуществления.
Известен способ отделения плодов и ягод от растений, улавливания и перемещения и устройство для его осуществления.
Недостатками известного способа и устройства являются трудности улавливания, копирования растений, отсутствие совмещения функций и догоровизна.
Цель изобретения - устранение недостатков и повышение уровня адаптивного управления и роботизации технологий и техники.
Поставленная цель достигается тем, что усилие для перемещения улавливателя и управления создают от взаимодействия с растениями с возможностью копирования улавливателем рядка растений и формирования траектории движения агрегата. Улавливатель соединен с механизмом поворота. Отделитель плодов и ягод выполнен в виде упругогибких ножей. Поверхность контакта улавливателя с растениями выполнена из упругоэластичного пенопласта. Отделитель и улавливатель плодов и ягод установлены на раме подвижно, с возможностью работы в качестве копира датчика отклонения от рядка растений и транспортера. Совмещением функций технологических, транспортных, управляющих и защищающих снижают металлоемкость и стоимость процессов.
Основой изобретения является адаптивное изменение параметров, очувствление - открытость рабочих органов к внешним условиям, совмещение функций и процессов. Процессы копирования растений, вождения, уборки, улавливания, сбора, транспортирования, а также функции рабочих органов, копиров, датчиков автовождения, регулятора и объекта управления совмещают и согласовывают так, что при отклонении от заданного направления изменяют положение, дают сигнал и действуют в сторону устранения отклонения и ошибки.
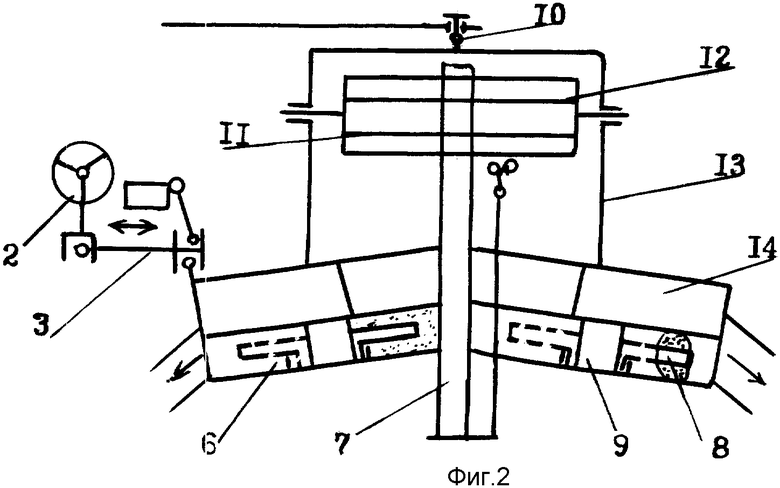
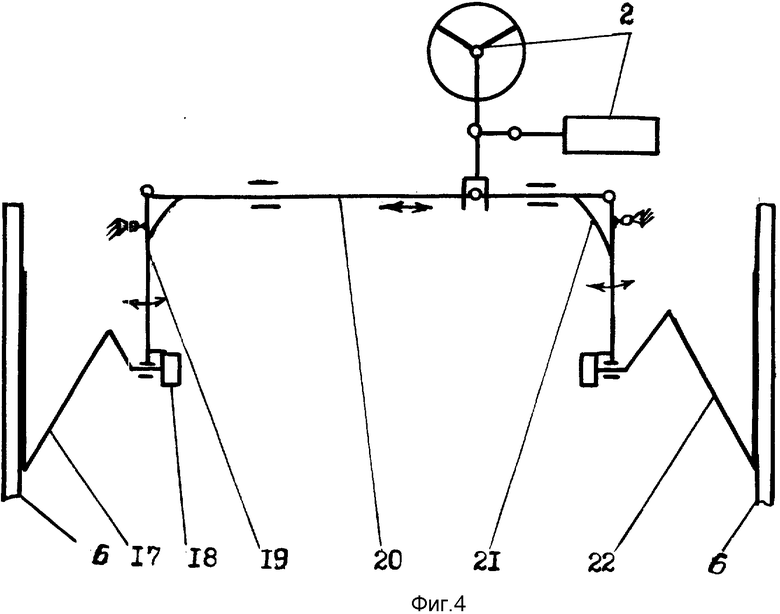
В графической части на фиг. 1 изображена схема агрегата для реализации способа управления при уборке плодов и ягод, вид сверху, с наложением эпюры скоростей, на фиг. 2 - схема устройства и связи с рулевым управлением, вид сзади, на фиг. 3 - схема уборочного модуля, вид сбоку, на фиг. 4 - схема рабочих органов (ножей) для уборки урожая, листьев и обрезков лозы, связанных с механизмом поворота в варианте слежения за двумя рядами, вид сверху, на фиг. 5 - схема ножей копира-датчика слежения за одним рядом.
Устройство для реализации способа содержит энергетическое средство 1 (фиг. 1), рулевое управление 2 которого связано тягой 3 с улавливателем-транспортером 4 из упругодеформирующих копиров 5 рядка 6 растений и аналогичных копиров 7 с другой стороны рядка. Копиры могут быть изготовлены из упругой губки с носителем 8 и стержнями 9. Рабочие органы установлены на оси 10 (фиг. 2) с возможностью поворота и перемещения отделителей-встряхивателей 11, гребенки или лопатки 12 которых взаимодействуют с растениями в камере 13, на дне которого расположены копиры-улавливатели-транспортеры для отвода ягод 14 (фиг. 3) к желобкам 16 или другим транспортерам для перемещения урожая к накопителю (таре, бункеру).
В качестве отделителя урожая и средства для уборки листьев, гроздей и обрезки лозы можно использовать упругогибкие ножи 17 (фиг. 4, 5) с приводом 18 на рычагах 19, связанных с ползунком 20 и пружинами 21 с возможностью копирования рядков и резания биомассы лезвием (заточкой) на внешней поверхности. В вертикальной плоскости положение ножей 17 и рычагов можно 19 фиксировать или изменять по высоте, а в горизонтальной плоскости их положение может определяться рядком, т.е. очувствлены к рядкам и являются датчиками сигнала для поворота.
Улавливающие транспортеры 4, 5, 7, отделители, встряхиватели и ножи установлены с возможностью копирования рядов 6, выполнения функций датчика, регулятора и объекта управления, поворота и перемещения в сторону для получения и устранения сигнала.
Транспортеры-улавливатели наклонены от рядка и могут приводиться силой реакции растений - влекомы толкающей силой энергосредства, деформироваться упругой силой, огибать растения вокруг шкивов или звездочек гибкими носителями 8 и стержнями сохранять форму, прижиматься друг к другу и к растениям без зазора и просвета и исключить потери урожая ягод на землю.
Режущий аппарат 17 имеет форму конусной спирали и лезвие (заточку) на внешней поверхности. Конусная спираль 17 изготовлена в виде упругой спирали и может изменять форму в некоторых пределах. Два ножа в междурядии составляют копир рядков, датчик курса может чувствовать отклонение от стеблей рядка 6, изменять форму, деформироваться и перемещать ползунок 20 и ввести сигнал в механизм управления 2 для поворота в сторону совмещения осей агрегата и междурядия.
В варианте исполнения для копирования одного рядка пружина 21 соединена с рычагом 19 и рамой с возможностью слежения за силами ножа 17 и пружины 21 (фиг. 5), приведенными к ползунку 20, для перемещения золотника пропорционально различию сил.
Устройство работает следующим образом. При движении агрегата по междурядиям улавливающие транспортеры 4 катятся по рядку с двух сторон, приводятся в движение стволами, стеблями, столбами и преобразуют движение в противодвижение.
Поступательное движение агрегата создает толкающую силу по стволам и растениям, транспортер катится аналогично гусенице трактора по земле при буксировке с той разницей, что опорой лент является рядок, и высокая упругость губки (пенопласта) двух транспортеров заполняет все пустоты между стволами. При отсутствии растений транспортеры не приводятся. Такие влекомые транспортеры-улавливатели не нуждаются в синхронном приводе от мотора и согласовании скоростей с учетом микрорельефа. Другие рабочие органы приводятся от двигателя.
Отделители-встряхиватели 11 лопатками и гребенками 12 при вращении в одну или разные стороны отделяют плоды и ягоды от растений, транспортеры-улавливатели 4, 5, 7 улавливают и перемещают их и подают через желобок 16 в тару. Стенки камеры 13 исключают выход в сторону и направляют плоды и ягоды в тару или в транспортер, бункер и т.д.
Отклонение агрегата от рядка вызывает различие деформаций упругих улавливателей-транспортеров, возникает сила-сигнал, перемещается золотник усилителя руля, направляется поток жидкости в цилиндр поворота агрегата в сторону снижения сигнала. При уводе агрегата вправо сигнал устраняется поворотом агрегата влево, а при уводе влево агрегат поворачивается вправо, в каждом случае выходной сигнал обратным знаком подается на вход управления, и формируется траектория движения по сигналу транспортера-улавливателя так, что силы взаимодействия улавливателей-транспортеров и рядков растений выравнивают, а изменение воспринимается как ошибка и устраняется поворотом агрегата.
Технологическая машина реагирует на отклонение от рядка - базовой линии, как датчик выдает два сигнала: угол поворота в шарнире 10 в вертикальной плоскости свидетельствует об отклонении и накопленной ошибке, а угол поворота в горизонтальной плоскости характеризует ошибку курса. Слежение за двумя параметрами и их изменение в сторону устранения отклонений от заданных значений формирует траекторию.
При этом совмещаются функции датчиков, регуляторов и объектов управления, улавливателей, транспортеров и технологического модуля.
При отклонении улавливателя-транспортера от рядка растений вправо возникают разности сил и деформаций. Эта разность сил перемещает золотник, направляет рабочую жидкость в механизм поворота, и агрегат поворачивается влево до устранения сигнала. При отклонении влево от заданного направления агрегат поворачивается вправо до устранения ошибки и выравнивания сил и деформаций улавливателя с двух сторон рядка. В каждом случае сигнал об отклонении осей рядка и улавливателя вначале вызывает поворот и перемещение относительно шарнира 10, за пределами допустимой деформации упругого улавливателя-транспортера сигнал отрабатывается механизмом поворота. Поворот в сторону выравнивания деформации заканчивается совмещением осей рядка и улавливателей - устранением ошибки за счет чувствительности улавливателя и механизма поворота. Очувствление улавливателя-копира, перемещение и поворот относительно трактора и с трактором дают совмещение осей, выравнивание сил и деформаций упругого улавливателя-транспортера, сигнал отрабатывается механизмом поворота. Поворот в сторону выравнивания деформаций заканчивается совмещением осей рядка и улавливателей - устранением ошибки за счет чувствительности улавливателя и механизма поворота. Очувствление улавливателя-копира, перемещение и поворот относительно трактора и с трактором дают совмещение осей, выравнивание сил и деформаций, совмещение функций датчика и объекта управления.
Улавливатели-транспортеры копируют рядок с двух сторон, причем скорость качения их по рядку близка к нулю, а нерабочие ветви имеют двойную скорость без привода внутри машины, следовательно, наводка рабочих органов на рядок без усилителя и с ним происходит в квазистатичесом состоянии. Упругость, эластичность мягкого улавливателя из губки, деформация до компенсации неточности взаимодействий машины и среды, адаптивное управление технологическим процессом дает совмещение функций датчика и объекта управления.
При обрезке лозы и уборке гроздей и листьев ножи рабочих органов 17, 22 вращаются приводом 18, например гидромотором, урожай подается в тару или к рабочим органам для переработки.
При отклонении осей агрегата и рядков рабочие органы изменяют форму в заданных пределах, после этого дают сигнал и изменяют свое положение исполнительным элементом агрегата, т.е. управляют собой, агрегатом и через него опять собой.
Сигнал возникает в виде различия форм ножей, их деформаций и сил перемещения ползунка 20 и золотника усилителя механизма поворота. Исполнительные элементы поворачивают агрегат в сторону устранения сигнала.
При уходе агрегата вправо или влево процессы управления дают сигнал, реализуют его и устраняют так же, как по сигналу улавливателя с той лишь разницей, что сигналы подаются ножами 17 и пружинами 21. Возможно прижатие двух рабочих органов к рядкам одной пружиной. При копировании одного рядка одним рабочим органом 17 (фиг. 5) сигнал характеризует отклонение сил ножа 17 и пружины 21 от некоторого заданного значения равновесия сил. Нож убирает урожай ягод, листьев, плодов и т.д. в зависимости от культуры и управляет собой и агрегатом.
Общим для всех способов и средств является то, что при нежелательном отклонении от курса, например, вправо возникает различие деформаций рабочих органов, перемещается орган управления, агрегат поворачивается влево до снижения отклонения. В результате любого воздействия рабочего органа на рулевое управление агрегат поворачивается в обратном направлении. Такие взаимодействия изменяют форму рабочего органа, а затем формируют сигнал, устраняют его и поддерживают траекторию.
Отсутствие разницы деформаций свидетельствует о нормальном положении. Отклонение осей агрегата и ряда приводит к некоторому повороту и смещению рабочих органов в допустимых пределах деформации, после чего исполнительный элемент механизма поворота устраняет рассогласование, т.е. процесс включает самоприспособление рабочих органов, управление агрегатом по угловому и линейному отклонениям - совмещение функций щупа, датчика, объекта управления и регулятора и согласование действий в некоторых заданных настроечных пределах.
Рабочие органы-щупы-датчики-копиры изменяют положение, являются объектами управления.
Их положение задается в реальной среде по одному сигналу, т.е. два рабочих органа не могут ввести два неоднозначных сигнала, не требуют сложных систем обработки информации.
Таким образом, совмещая процессы копирования ряда, уборки или ухода, улавливания и перемещения материала, выравнивая силы воздействия на ряд, повышая чувствительность к среде, совмещая функции ножа, улавливателя, датчика, объекта управления и транспортера и регулятора при выполнении технологических процессов, повышают чувствительность к внешней среде, обеспечивают адаптивное управление.
При использовании способа и устройства снижаются стоимость изготовления и эксплуатации, металлоемкость, экологическая опасность стряхивания корней и отклонения рабочих органов от ряда при уборке урожая ягод, плодов, гроздей, листьев, веток, лозы, а также потери урожая, включая листья винограда - продукта питания и лечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2027336C1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| МАШИНА | 2011 |
|
RU2499720C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ И АГРЕГАТ ДЛЯ ЗЕМЛЕДЕЛИЯ | 1992 |
|
RU2092001C1 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| АГРЕГАТ | 1995 |
|
RU2101893C1 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086084C1 |


Способ уборки плодов и ягод и устройство для его осуществления предназначены для повышения уровня адаптивного управления и роботизации технологий и техники. В способе уборки плодов и ягод усилие для перемещения улавливателя назад и в сторону создают от его взаимодействия с растениями с возможностью копирования улавливателем рядка растений и формирования траектории движения агрегата. В устройстве механизм поворота соединен с улавливателем плодов и ягод, который может быть выполнен в виде упругогибких ножей. 2 с. и 3 з.п. ф-лы, 5 ил.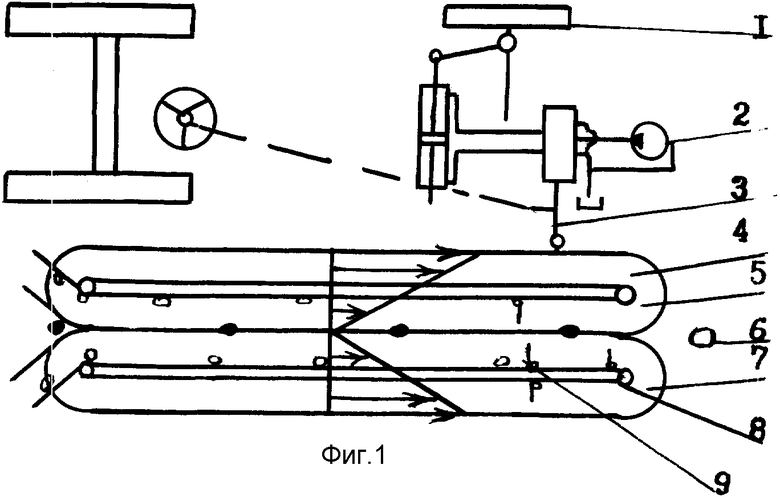
| SU, авторское свидетельство, 333902, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
