Изобретение относится к агромашинам, агромашиностроению, способам использования машин при обработке земли, может быть использовано в сопутствующих отраслях.
Известна агромашина, содержащая рабочие органы реверсивного хода и привод для их перемещения относительно энергосредства /пат. РФ №2086083, А01B 63/02, Б.И. №22, 1997 г./.
Цель изобретения - повышение управляемости и эффективности защиты человека, техники и природы. Другие цели даны в описании.
Поставленная цель достигается тем, что регулятор скорости и расхода топлива, мощности (регулятор дизеля) энергосредства через тяги связи с гидрораспределителем и источником энергии, фиксатор шарнира вертикальной оси и гидроцилиндры перемещения колес, копир с рычагом соединен с механизмом ручной коррекции курса с внешней стороны агрегата, а через привод рабочих органов и вал отбора мощности с муфтой сцепления - датчиком нагрузки - с силовым регулятором и подъемником орудий, впереди которого смонтирован контур защиты трактора с рычагами /энергосредства/. Регулятор подачи рабочих органов выполнен в виде преобразователя части рабочего хода в перемещение вперед. Регулятор мощности двигателя соединен с регулятором нагрузки двигателя. Агромашина содержит механизм преобразования реверсивного движения во вращение рабочего органа. Агромашина содержит ограничитель поворота энергомодуля относительно технологического модуля при работе на склонах. Контур защиты из гибких тяг зоны перемещения рабочих органов связан с органами остановки. Агромашина содержит регулятор подачи рабочих органов вперед и повторности выполнения работ в виде механизма шагового движения.
Дисковые рабочие органы перемещают в тяговом и тормозном режимах при выполнении тяжелых работ и в нейтральном при выполнении легких работ. Сопротивление дисковых рабочих органов преобразуют в движущую силу или изменяют путем перевода из тормозного режима в ведущий или нейтральный. Ширину захвата повышают и тяговое сопротивление снижают путем перемещения рабочих органов в разных режимах, сочетая тяговый и тормозной режимы, уравновешивают и снижают нагрузку колес при выполнении различных работ. Ширину захвата агрегата повышают путем снижения нагрузки колес и увеличения поперечного хода или увеличения числа рабочих органов в режимах взаимоуравновешивания сопротивлений. Тяговое сопротивление широкозахватного агрегата снижают путем перемещения рабочих органов в различных режимах.
Верхний слой почвы укладывают на дно борозды и заделывают нижележащими слоями тонкопластовой глубокой обработкой узкозахватными реверсивными рабочими органами. Тяговую силу колес регулируют путем перевода рабочих органов из тормозного режима в ведущий или нейтральный при перемещении относительно энергоисточника.
Лопату бульдозера перемещают реверсивно и поворотом преобразуют в грейдера и бульдозера поперечного действия в ведущем, тормозном и нейтральном режимах. Диапазон изменения функций расширяют изменением режима работы рабочих органов. Сопротивление сменных рабочих органов преобразуют в продольную силу в широком диапазоне изменения функций машин или изменением режима работы преобразуют функции. Сопротивление рабочих органов при криволинейном реверсивном перемещении преобразуют в силу подачи вперед или торможения агрегата. Энергию реверсивного перемещения преобразуют во вращение рабочего органа для резания материала при уборке биомассы.
Сопротивление почвы преобразуют во вращение ролика и пласт крошат и оборачивают роликом в одну сторону при реверсивном перемещении в обе стороны. Сопротивление рабочих органов или их секций при вспашке, лущении и выполнении других работ преобразуют в поворот до упора в ограничители, после чего частично преобразуют в движущую силу и снижают тягово-сцепные функции колес энергосредства. Сопротивление сменных рабочих органов или их секций при выполнении различных работ уравновешивают средством противосползания или рабочими органами второго борта и режим работы колес энергосредства приближают к холостому качению. Движущую силу рабочих органов изменяют от нуля до номинального значения силы тяги в режиме утилизации энергии. Приводы рабочих органов и ходовой части настраивают с возможностью изменения повторности работ для ритмической подачи.
За один проход в поперечном направлении рабочие органы перемещают вперед от нуля до нескольких значений ширины их захвата в зависимости от вида и потребности. Работы выполняют перемещая рабочие органы на расстояние, близкое шагу их установки с возможностью перекрытия и суммирования ходов секций до необходимой ширины захвата агромашины.
Агромашина содержит регулятор подачи рабочих органов вперед и кратности выполнения работ за один проход, при этом в одном режиме регулятор подачи выполнен в виде коробки скоростей. Регулятор подачи рабочих органов выполнен в виде преобразователя части рабочего хода в перемещение вперед. Регулятор мощности двигателя соединен с регулятором нагрузки двигателя. Машина содержит механизм преобразования реверсивного движения во вращение рабочего органа. Агромашина содержит ограничитель поворота /крена/ энергомодуля относительно технологического модуля при работе на склонах. Зона перемещения рабочих органов имеет контур защиты из гибких тяг, связанных с органами остановки. Агромашина содержит регулятор подачи рабочих органов вперед и повторности выполнения работ в виде механизма шагового движения.
Ось поворота многорежимного рабочего органа смещена от его центра сопротивления и соединена с приводом с возможностью перемещения в ведущем, тормозном и нейтральном режимах. Агрегат содержит механизм преобразования реверсивного поступательного движения во вращение рабочего органа для сенокошения.
Лопата установлена на оси поворота с возможностью выполнения и повторения работ в тяговом или тормозном и нейтральном режимах. Дисковый рабочий орган соединен с приводом с возможностью реверсивного перемещения в ведущем или тормозном и нейтральном режимах. Агрегат содержит регулятор подачи вперед и повторения работ. Привод рабочих органов соединен с трансмиссией ходовой части с возможностью подачи вперед в конце поперечного хода или непрерывной подачи вперед малой скоростью движения агрегата.
Режим работы реверсивного рабочего органа изменяется выбором направления смещения оси поворота от центра сопротивления /точки приложения равнодействующей сопротивлений/ и степени свободы /угла поворота/. Нулевой угол поворота - свидетельство жесткого соединения. Самоповорот рабочих органов между ограничителями происходит вправо или влево при смещении центра сопротивления от оси поворота. При этом тыльная сторона и продольная составляющая сопротивления могут быть обращены вперед или назад, режим может быть ведущий или тормозной. Среднее положение соответствует нейтральному режиму, режиму блокировки шарнира и исключения поворота. После вспашки функции катков, борон, лущильников в ведущем, тормозном и нейтральном режимах корректируют с учетом совместимости функций. Противоположные знаки ведущих и тормозных сил при изменении направления движения агрегата /вперед, назад/ содействуют или противодействуют движению. Реверсирование подачи рабочих органов, движение агрегата вперед и назад или остановка при большом повторении работ определяет также режим работы. Всегда поворот изменяет режим и функции рабочих органов.
Технологический модуль воздействует на энергетическое средство контуром защиты от встречи с препятствием и стабилизации движения, причем устойчивость энергетического средства повышают используя высокую устойчивость широкозахватного технологического модуля.
Взаимодействие энергетического и технологического модулей осуществляют ограничителями относительного поворота и контуром защиты. Агрегат имеет контур защиты в виде гибких тяг, смонтированных между энергетическим и технологическим модулями в зоне движения рабочих органов и связанных с органами управления для остановки агрегата.
Агрегат содержит регулятор нагрузки энергосредства, который связан с регулятором расхода топлива. Регулятор нагрузки связан с регулятором расхода топлива /мощности/ с возможностью выглубления рабочего органа при его перегрузке.
Поворот энергетического средства относительно технологического модуля вокруг продольной оси ограничивают, и угол устойчивости энергетического модуля повышают до угла устойчивости широкозахватного технологического модуля, ограничивают угол их относительного поворота.
Агрегат содержит ограничители поворота энергетического модуля вокруг продольной оси технологического модуля с возможностью повышения устойчивости до устойчивости широкозахватного технологического модуля. Ограничители относительного поворота энергетического и технологического модулей допускают регулирование степени свободы поворота легкого трактора относительно широкозахватного орудия. Малая тяговая сила или движение в нейтральном режиме исключает буксование и снижает опасность бокового сползания при работе в горной зоне. Независимость ширины захвата агрегата от массы, тягового класса трактора, возможность снижения массы повышает экономические и экологические показатели работы агрегата.
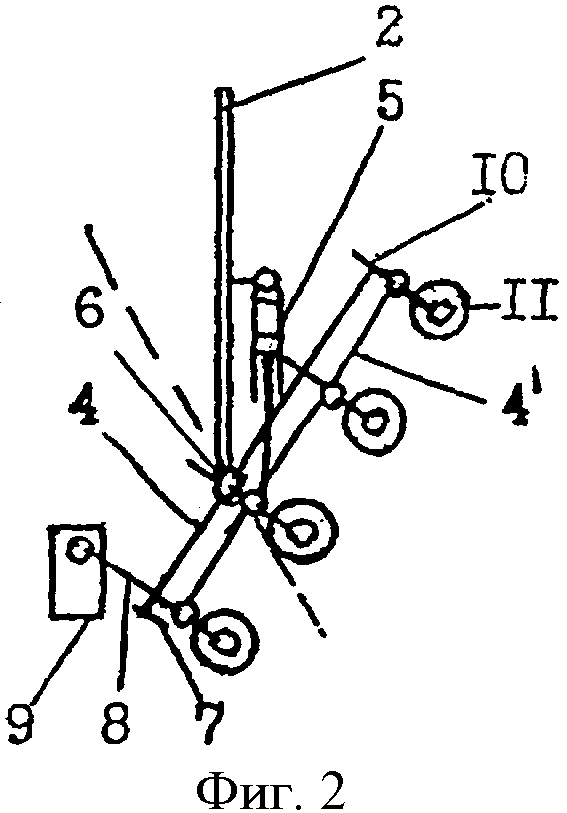
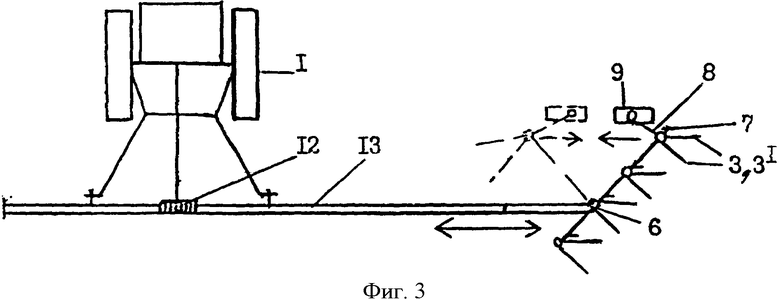
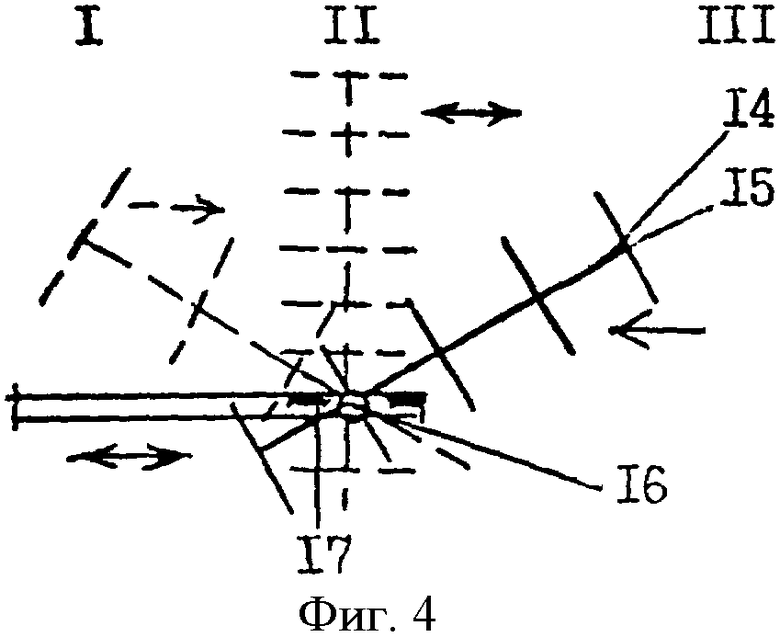
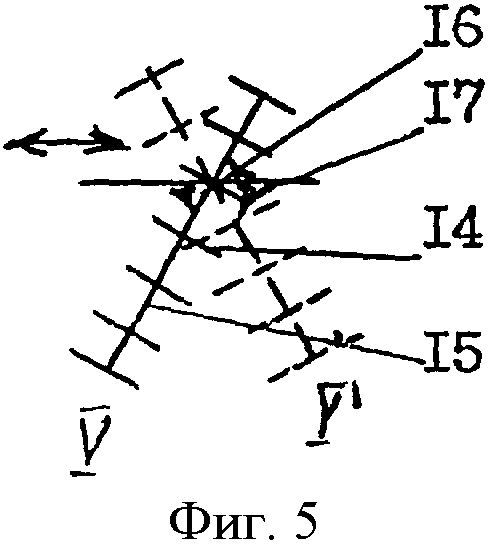
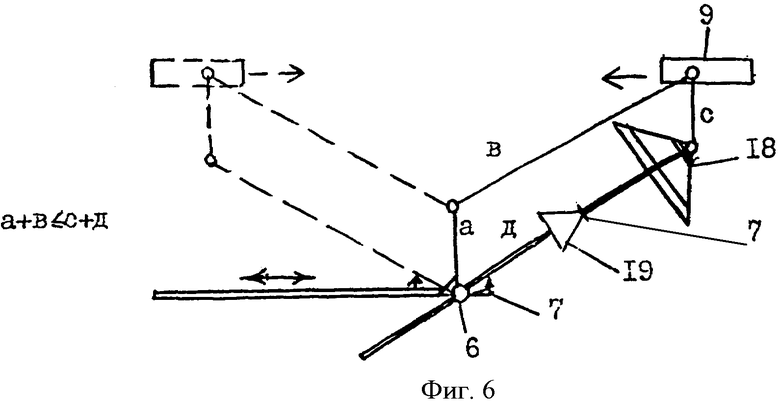
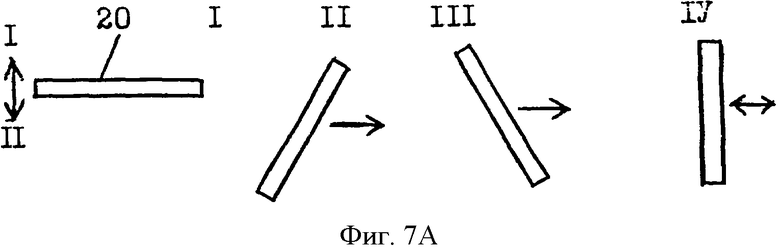
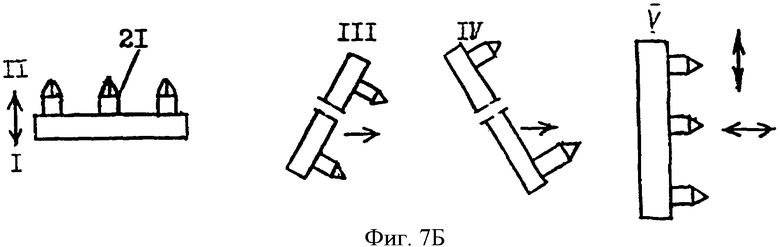
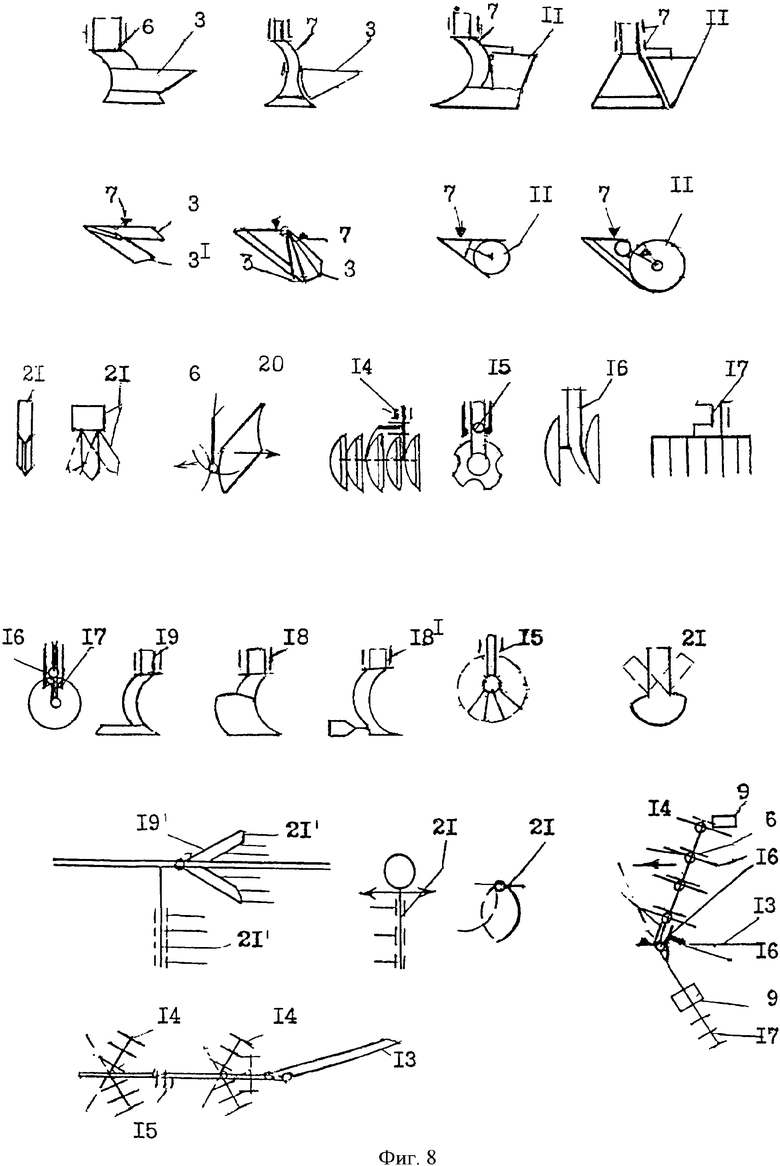
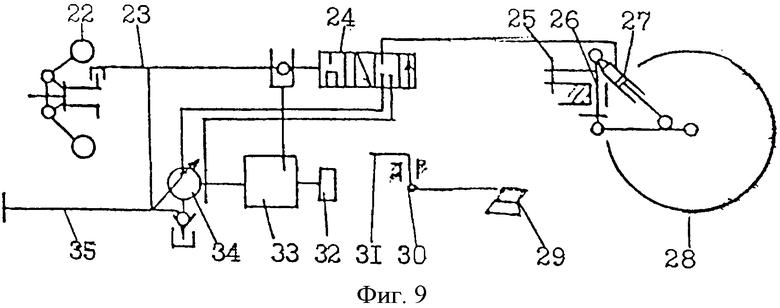
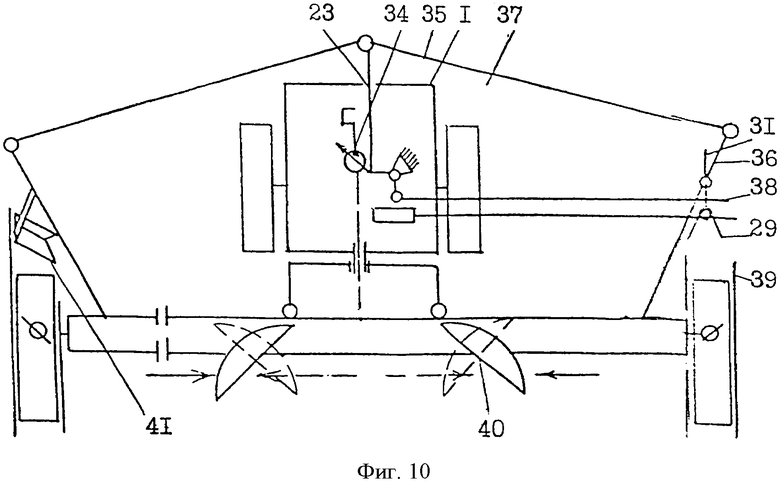
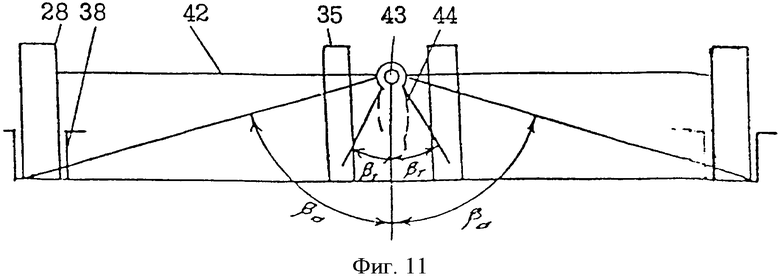
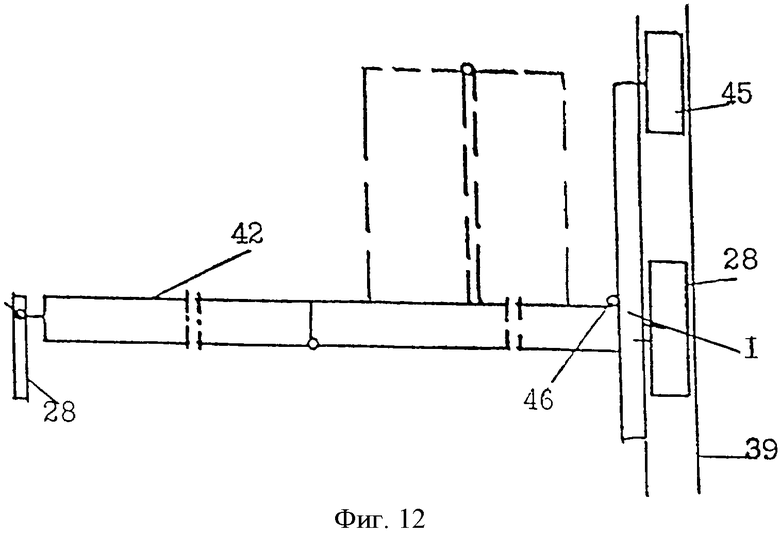
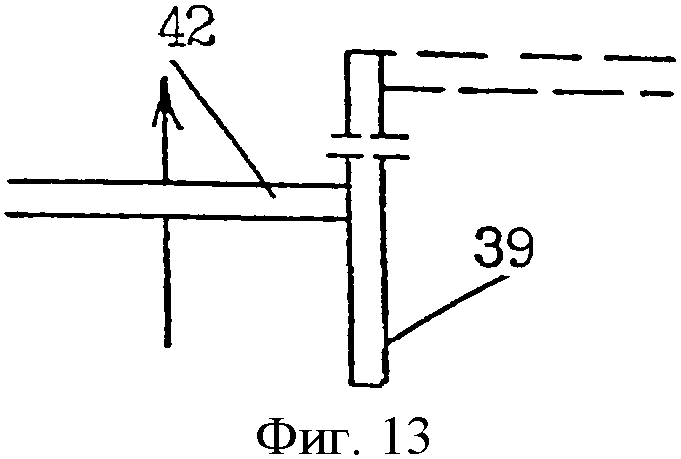
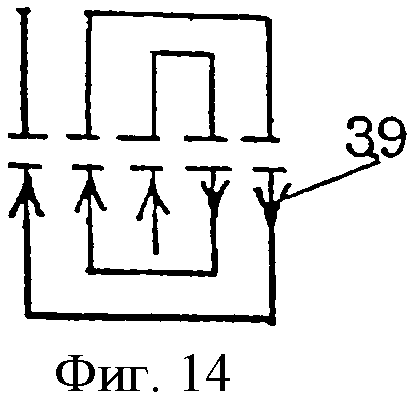
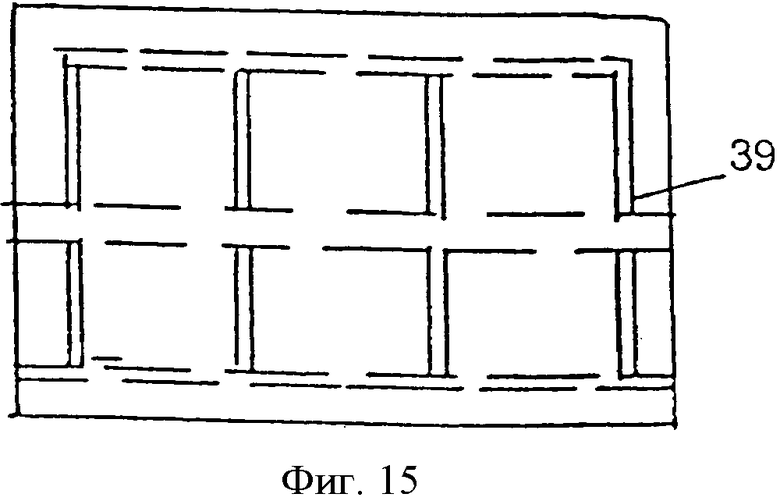
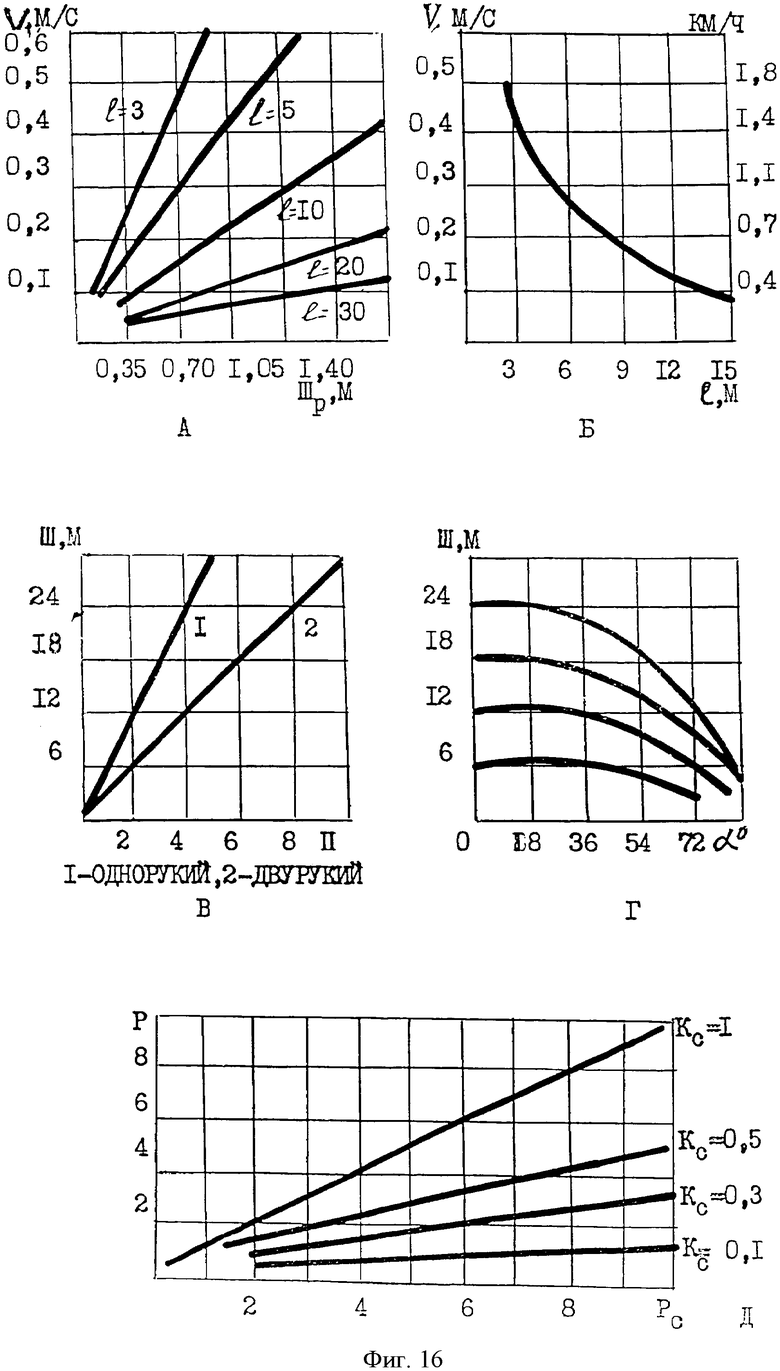
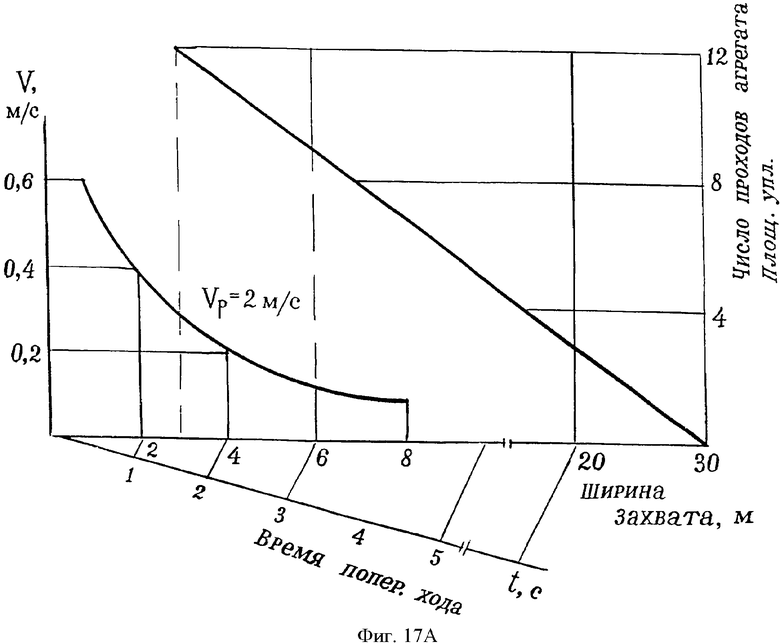
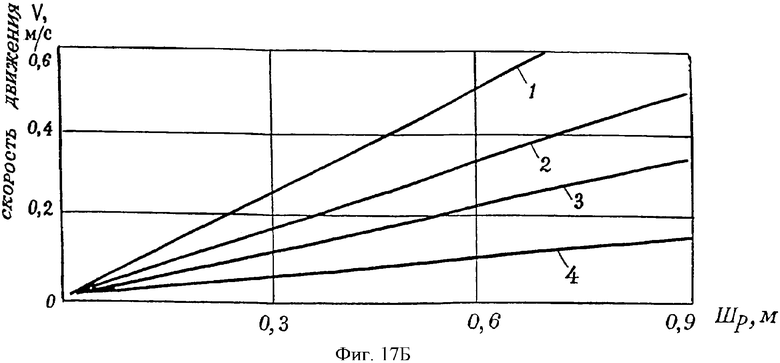
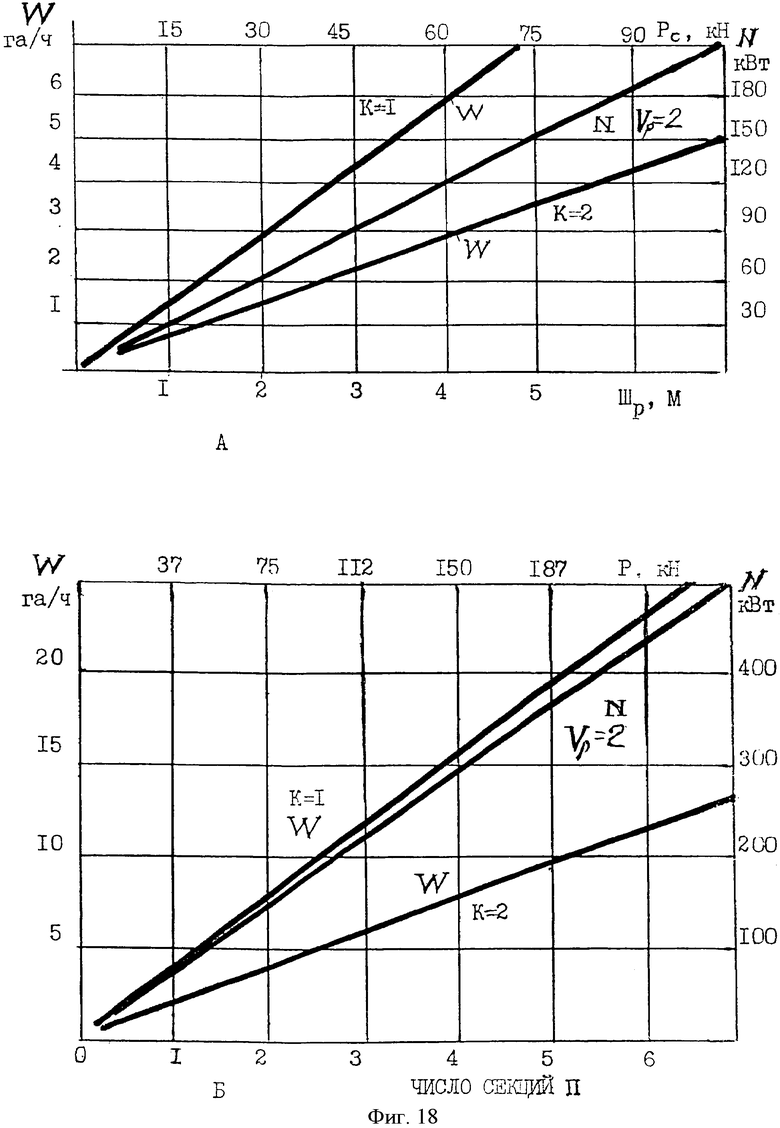
В графической части на фиг.1 изображена схема реализации способа преобразованием право- и левооборачивающих тормозных режимов рабочих органов и всего плуга для ровной вспашки, на фиг.2 - схема изменения режимов оборота почвы роликом, на фиг.3 - схема ведущего режима право- и левооборачивающих корпусов одного борта, на фиг.4 - схема ведущего I, III и нейтрального II режимов работы дисковой секции, на фиг.5 - схема частично тормозного режима работы дисковой секции, на фиг.6 - схема рабочих органов для плантажа и послойной тонкопластовой обработки почвы на большую глубину в ведущем режиме, на фиг.7А, Б - схема расположения лопаты бульдозера и рыхлителей при работе в различных режимах, на фиг.8 - схемы режимных рабочих органов для выполнения различных работ в зависимости от известных особенностей, на фиг.9 - схема управления и защиты от перегрузки и препятствий в почве выглублением как варианта замены фиксаторов, предохранителей, срезающих штифтов и других средств защиты, на фиг.10 - схема защиты от препятствий на поле в режиме агроробота применительно к внешним условиям, на фиг.11 - схема защиты от опрокидывания энергетического модуля или трактора путем повышения предельного угла его крена до угла устойчивости широкозахватного агрегата, на фиг.12 - схема сложения секций при транспортировке, на фиг.13 - схема борозды для полива - базовой линии двух проходов в режиме автовождения, на фиг.14 - схема маршрута следокопирования в режиме агроробота, на фиг.15 - схема линий полива и автовождения широкозахватного агрегата-робота, на фиг.16 - номограммы определения режимов и параметров настройки многоцелевого и многофункционального агрегата: скорости движения (а, б), ширины захвата (в, г), возможной толкающей силы Р для различных режимов преобразования Кс сопротивления РС, на фиг.17 - схемы формирования скоростного режима по захвату (А) и 1, 2, 3, 4 повторений /кратности/ работы многоцелевого рабочего органа (Б), на фиг.18 - потенциал режимов и производительности для хода 10 м, ширины рабочего, органа Шр 5 м и скорости Vp 2 м/с.
Способ реализуется агрегатом /машиной/, включающим трактор 1 (фиг.1, 2) или иной энергоисточник с дышлом 2 для перемещения многорежимных рабочих органов с двумя отвалами 3, 3I для оборота почвы влево I, вправо II, в обе стороны III /бороздорез-арычник/ в зависимости от углового положения секций 4, 4I, поворачиваемых гидроцилиндром 5 вокруг вертикальной оси 6. Ограничители 7 поворота рабочих органов под действием сопротивления почвы, рычаг 8 для установки колеса 9 впереди /на необработанной поверхности/ под действием сопротивления почвы. Лемеха 10 с роликами II, переставляемыми вправо и влево звеном 4I и гидроцилиндром 5, также составляют секцию рабочих органов оборотного плуга. Цевочное зацепление (фиг.3) из звездочки 12 и рейки 13 могут реверсивно перемещать сменные рабочие органы и их секции в ведущем, тормозном и нейтральном режимах при выполнении различных работ. Это качество придает рабочим органам многорежимность.
Дисковые многорежимные рабочие органы 14 (фиг.4), батарея 15 на оси 16 самоповорота между ограничителями 17 связаны с приводом для перемещения в ведущем I, III и нейтральном II режимах. В тормозном режиме ось 16 смещена вперед от центра сопротивления, и ограничители 17 допускают поворот рабочих органов 14, 15 под действием сопротивления почвы при движении тормозном режиме (фиг.5).
Реверсивные многорежимные рабочие органы 18, 19 (фиг.6) для глубокой обработки почвы (плантажа, рыхления) составляют секцию с самопереставляемым /см. пунктирное изображение/ колесом-регулятором глубины при перемещении в обе стороны. Звенья а, в, с, д расположены в двух плоскостях и подобраны по условию а+в≤с+д.
Лопата 20 (фиг.7) связана с приводом с возможностью перемещения в тормозном I, III, ведущем II и нейтральном IV режимах. Аналогично установлена секция 21 (фиг.7Б) зубьев для рыхления на глубину, соответствующую их длине, в тормозном II, III, тяговом I, IV и нейтральном V режимах. Сменные зубья для резания материала продольным перемещением или корчевки камней также формируют режимы. Режимные рабочие органы (фиг.8) имеют оси 6 поворота - изменения режима.
Регулятор 22 (фиг.9) скорости и расхода топлива, тяги 23 связи с гидрораспределителем 24 и источником энергии, фиксатор 25 шарнира 26 вертикальной оси и гидроцилиндры 27 перемещения колес 28, копир 29 на оси 30 с рычагом 31 для ручной коррекции курса с внешней стороны агрегата, привод 32 рабочих органов через коробку 33 и вал отбора мощности с муфтой 34 - датчиком нагрузки - силовым регулятором и подъемником орудия, впереди которого смонтирован контур 35 защиты трактора с рычагами 36 (фиг.10) путем выключения муфты и торможения.
Трактор 1 имеет рулевое управление 37, органы пуска 38 и остановки, может копировать дорожки - борозды 39. Рабочие органы 40, 41 установлены на секциях рамы 42 (фиг.11), связанной шарниром 43 с ограничителями в виде упругих рычагов 44 с возможностью относительного поворота и повышения угла устойчивости трактора βт до угла устойчивости агрегата βа и предотвращения опрокидывания, а также сползания. Колеса-датчики 28 (фиг.12) для копирования борозды 39 и секции, связанные осями 46 для складывания при транспортировке. Колеса могут копировать борозду при движении в обе стороны (фиг.13), в одну сторону (фиг.14) и комбинированно (фиг.15) путем копирования борозд и на поворотных полосах, как это показано стрелками.
Трансмиссия трактора содержит три диапазона скоростей для привода колес: технологический диапазон скоростей до 1 км/ч при высоком передаточном числе, тяговый 1-15 км/ч и транспортный 15-90 км/ч. В качестве источника энергии можно использовать тепловой или электрический двигатель. Большая ширина захвата агрегата снижает число проходов по полю и облегчает электрическое питание кабелем, ресурс которого зависит от числа проходов.
Регулятор 22 связан с регулятором сопротивления рабочих органов с возможностью регулирования мощности двигателя, затем сопротивления рабочих органов, т.е. удвоения пределов регулирования, а также выглубления рабочих органов при их перегрузке, встрече с препятствием в почве. Контур 35 защиты может реагировать на контакт с препятствием на поверхности поля и остановить агрегат. Это может обеспечить защиту человека, техники и среды от опасного столкновения с препятствиями в почве и на поле. Остановка может инициировать подачу сигнала человеку или действия для обхода препятствия. В конце поля контур защиты может по сигналу контакта с упором остановить агрегат. Ролик-отвал установлен на оси с возможностью вращения в обе стороны и поворота /самоперестановки/ между ограничителями корпуса под действием сопротивления почвы. Поворот отвала, ролика, корпуса и секций придает им реверсивность, оборотность, совместимость функций элементов и многорежимность. Ролик II является реверсивным отвалом для оборота почвы вправо и влево в зависимости от направления перемещения. Ролик II вращается вокруг своей оси, переставляется с осью вправо и влево до упора в ограничители 7 и оборачивает почву вправо и влево в режиме оборотного плуга и назад при перемещении рабочего органа в обе стороны в поперечном направлении. Такую же функцию выполняет отвал 3, 3I для оборота пласта вправо и влево при движении в обе стороны в режимах торможения /фиг.1, 2/, подталкивания и разгрузки колес трактора /фиг.3, 4, 5, 6, 7, 8/.
Рабочие органы и их секции могут изменить форму сечения пласта поворотом рабочего органа, подрезать пласт коротким лемехом, крошить почву ударом о ролик и отбрасывать почву, частично заменять трение почвы качением по ролику, снизить плужную подошву, резание и сжатие и заменить крошением узкого пласта, компенсировать повышение сопротивления с глубиной, преобразовать сопротивление почвы в движущую силу при перемещении рабочих органов относительно любого энергоисточника, увеличить длину хода, ширину захвата и производительность независимо от тягово-сцепных возможностей движителей.
Колесо 9 может катиться впереди секции или за ней в качестве катка. Рычаг несет колесо 9 и переставляет его под действием сопротивления почвы до упора в ограничители. К шарниру корпуса приложены сопротивления почвы и качения колеса. Сопротивление почвы на порядок выше сопротивления колеса. Поэтому поворачивающий момент достаточен для поворота корпусов, секций и колеса. Число корпусов и колес может быть больше одного. Колесо может регулировать глубину по известному способу и исключить скручивание секции и привода. В конце каждого хода колесо переставляется и катится впереди.
Звездочка 12 и рейка 13 цевочного зацепления установлены с возможностью преобразования вращения в перемещение рабочих органов. Звездочка может толкать и тянуть рейку вправо и влево. При установке звездочки подвижно она перемещает рейку и поднимается и опускается в конце каждого хода, и сообщает рейке и рабочим органам возвратно-поступательное движение. Длина хода изменяется пропорционально активной длине рейки. Составная рейка из секций допускает изменение длины хода. Пауза в конце каждого хода облегчает подачу вперед. Угловое положение рабочих органов задается ограничителями поворота, например болтами.
Многорежимная лопата может толкать и тормозить движение при продольном перемещении. При поперечном перемещении лопата может работать в режиме грейдера подталкивающего II и тормозящего III, и нейтрального IV или бульдозера поперечного перемещения материала. Замена лопаты зубьями может обеспечить рыхление в различных режимах. Возможно сочетание зубьев и лопаты - совмещение рыхления и перемещения почвы, грунта и других материалов в ведущем, тормозном и нейтральном режимах.
Криволинейная и дуговая траектория перемещения рабочих органов поворотным рычагом или двумя рычагами в противофазе дает силу для подачи вперед и торможения энергосредства при обратном ходе при дискретном движении. При непрерывном движении толкающая и тормозная силы и колебания этих сил не должны выходить за пределы тягово-сцепных возможностей колес. Поэтому можно и нужно сочетать ведущий и тормозной режимы работы рабочих органов для их взаимоуравновешивания и снижения нагрузки колес. Изменением режимов работы рабочих органов можно преобразовать режимы качения ведущих колес трактора или иного энергосредства. Торможение и остановка колес при поперечном ходе рабочих органов и нейтральный режим движения с малой скоростью можно обеспечить при выполнении различных работ и повторении их. Рабочие органы можно предохранить фиксаторами защиты от перегрузки.
При реализации способа выполнения работ агрегат с многорежимными рабочими органами работает следующим образом. Многорежимные рабочие органы 3-х оборотных плугов работают в качестве право- и левооборачивающих корпусов без холостого хода: почву оборачивают вправо при движении в одну сторону и влево при обратном ходе. Две поверхности 3, 3I отвала или ролики II обеспечивают работоспособность при любом проходе. В конце каждого прохода или поперечного хода секция корпусов и отвалы или крылья, ролики-отвалы поворачиваются до упора в ограничители 7, и секция поворачивается вокруг вертикальной оси 6 на 40-60°, и левооборачивающий плуг становится правооборачивающим и наоборот. Промежуточное положение соответствует работе с меньшей шириной захвата. За пределами работы в режиме оборотного плуга, по мере приближения угла к 90° функции изменяются: плуг преобразуется в бороздорез, гребнователь; дисковый плуг становится лущильником и бороной. Эти режимы работы формируются в тормозном режиме, когда трактор тянет, плуг тормозит. Трансформирование режимов гидроцилиндром 5 возможно на ходу.
Установка рабочих органов или секций культиватора, бороны, лущильника, бульдозера, рыхлителя, корчевателя и т.д. изменяет функции агрегата. Многорежимность и реверсивность работы расширяет функции. Самоперестановка и поворот /угловое положение/ рабочих органов и секций регулируется ограничителями 7, 17.
Перемещение рабочих органов в поперечном направлении допускает изменение угла и направления движения агрегата и воздействия на почву. Это расширяет возможности изменения режимов. Направление перемещения и угловое положение определяют значение и знак продольной силы - режим работы рабочих органов при выполнении различных работ. В зависимости от углового положения рабочих органов и их секций изменяется значение и знак продольной силы и режим. Ведущий режим свидетельствует преобразование сопротивления в движущую силу. Тормозной режим противоположен ведущему. Нейтральный режим снижает продольную силу. Во всех режимах фиксатор или муфта защищает от поломки.
Зубья, рыхлители (рис.7 Б) - борона имеет один ряд зубьев круглого, кинжалоподобного, эллиптического, плоского сечения и поворотом их секции регулируется шаг - проекция на ось агрегата, скорость или повторность выполнения работ. Круглое сечение зубьев при бороновании формирует нейтральный режим, один ряд облегчает очистку и формирование валика материала, оставляемого на краю прохода. Ведущий и тормозной режимы работы зубьев 21 формируются поворотом зубьев некруглого сечения /плоского, кинжального, эллиптического/ и перемещением со скоростью, превышающей скорость движения агрегата. Это влияет и определяет кратность повторения работ при бороновании, рыхлении, прочесывании почвы, сборе материалов /камней, клубней/ в зависимости от размера, прочности и глубины хода. Боронование сочетают с другими операциями /вспашкой, посевом, уборкой, планировкой, обработкой материалов /рудного, инертного/, грунтов около трактора и на некотором удалении от него /дистанционно/. Путем замены инструмента выполняются ремонт, очистка площадей, стен, стекол, пожаротушение манипулятором вертикального перемещения инструмента.
Дистанционная работа возможна в, над и под водой, землей, зерном, силосом, клубнями, сеном и др. материалов в хранилищах с необходимой повторностью. При остановке трактора /нулевой скорости/ повторность возрастает, по мере повышения скорости повторность выполнения операций снижается до единицы /однократной работы/, а затем можно снизить при выполнении операций с огрехом /просветом/. Диапазон изменения функций расширяют изменением режима работы рабочих органов, сопротивление преобразуют в продольную силу в ведущем и тормозном режимах.
Рабочие органы в виде зубьев, лап, дисков, лемехов, отвалов, лопат, сошников и других рабочих органов для выполнения всех известных и новых операций хотя бы в одном режиме снижают нагрузку колес, а при изменении и сочетании режимов и функций открывают неограниченные возможности работы около трактора и дистанционно.
Рабочие органы перемещаются в ведущем или ведомом, нейтральном и тормозном режимах. Режим определяют несколькими способами:
- выбором направления /вперед, назад/ смещения центра сопротивления от оси поворота секций, рабочих органов, остановкой при перегрузке,
- изменением направления подачи рабочих органов или их секций /движением агрегата вперед, назад/, а также остановкой при нулевой подаче и большом повторении операций, при перегрузке и контуром защиты,
- изменением направления перемещения рабочих органов относительно энергоисточника /по оси, поперек, под углом/ или препятствия,
- изменением формы рабочего органа, сочетанием рабочих органов.
Многорежимными рабочими органами работу выполняют однократно без дополнительных рабочих органов и проходов агрегата по полю, многократно и различным сочетанием операций и рабочих органов и их режимов. Многорежимными рабочими органами можно регулировать режим качения колес или снизить их нагрузку при вспашке с отвалом и без него на различную глубину, плантажную и ярусную обработку сочетать с дообработкой пласта. Заменой рабочих органов и сочетанием режимов можно провести дисковое и лемешное лущение, культивацию, боронование, каткование, планировку, бороздование, грейдерование, рыхление, противоэрозионные работы, культурно-технические, дорожно-строительные и другие операции обработки почвы, грунтов, рудного и нерудного материалов. В каждом случае сочетанием режимов работы и качения колес можно минимизировать нагрузку, получить эффект уравновешивания продольных сил и приближения к нейтральному режиму, резервирования тягово-сцепных возможностей энергосредства и снижения буксования.
Увеличение режимов работы в 2-3 раза, совмещение 2-3 операций, повторение работ в десятки раз расширяет функциональные возможности рабочих органов и энергосредств. Широкое регулирование режимов и сил, возможность изменения знака сил повышает адаптивность и работоспособность на склонах, на влажной и рыхлой поверхности, а при наличии фиксатора и на каменистом поле.
Редуктор со сменной звездочкой цевочного зацепления перемещает рейку и рабочие органы в обе стороны со скоростями 1-3 м/с при выполнении известных операций энергоисточниками различной мощности. Скорость перемещения рабочих органов можно регулировать известными способами в широких пределах и использовать для расширения функций: получения динамических сил для дробления материала, прокладки трубопроводов без рытья траншей, укрепления или разрушения сооружений, строительства, разработки месторождений, при проведении культурно-технических и других работ совмещением технологических и ударных процессов. Силы воздействия рабочих органов на почву или иной материал зависят от прочности привода и практически можно увеличить во столько раз, во сколько раз прочность металла привода выше коэффициента сцепления колес с почвой /много десятков раз/.
Глубокая обработка почв рабочими органами поперечного хода без тяжелых тракторов осуществляется тонкопластовой /узкозахватной/ системой рабочих органов. При этом верхний слой укладывают на дно борозды и заделывают нижележащими слоями. Глубокая обработка рабочими органами малой ширины преобразует глубину в ширину пласта, т.е. снижает зависимость сопротивления от глубины, облегчает глубокую укладку засоренной почвы, очистку полей от сорняков и последствий некоторых химических технологий, улучшает водно-воздушный режим - накопление влаги, снижает смыв плодородного слоя путем его укрытия в доступных корням растений слоях /горизонтах/ почвы. Это важно и на склонах, где опасность схода плодородного слоя вниз зависит от коэффициента удерживающих почву связей частиц и корней /дернины/. Угол плодородного склона пропорционален значению этого коэффициента и влияет на выбор культуры и технологии ее возделывания с учетом других условий зоны. В любой зоне опасны недостаток сил, малая ширина захвата и большое число проходов. С другой стороны, избыток сил, нарушение режима работы также опасны и вредны.
Сопротивление сменных многорежимных, многофункциональных рабочих органов одного борта уравновешивают противодействием рабочих органов второго борта или средства противосползания и разгружают колеса от поперечной силы, а изменением режимов работы регулируют продольную составляющую и снижают тяговое усилие знергосредства при вспашке, лущении, бороновании, рыхлении, плантаже, планировке, бороновании, плоскорезной обработке, бульдозеровании и на других работах в земледелии и других отраслях обработки почвы, грунта, пустой породы, рудного и нерудного и инертного строительного материалов. Недостаток силы - снижение проходимости и избыток сил - превышение тормозных возможностей колес нарушает режим энерго-, ресурсо- и почвосбережения. Нейтральный режим минимизирует нагрузку и потери энергии на буксование или скольжение. Выбор режима работы, полезное сочетание режимов перемещения многорежимных рабочих органов, их сил и сопротивлений повышает эффективность работы, фиксаторы защищают от поломки при встрече с камнем.
Изменение режима работы рабочих органов, повышение сил движения и торможения дает сигнал или силу для регулирования вертикальной нагрузки колес и тягово-тормозных сил, дополняющих силы многорежимных рабочих органов. Это расширяет пределы регулирования сил по правилу: повышение тяговой /тормозной/ силы догружает колеса силой тяжести и повышает тягово-сцепные качества. Толкающая сила разгружает колеса, обратная связь может быть переключена, может быть положительной и отрицательной в зависимости от производственной необходимости и использована для усиления или ослабления воздействий многорежимного рабочего органа на почву. При выполнении других работ влияние режима работы и обратной связи снижается до нуля. Утилизация энергии избыточной силы /эффект буксировки/ допустима и сопряжена с потерями энергии и ресурса колес. Сочетание ведущего и тормозного режимов снижает избыток и недостаток сил, приводит в нейтральный режим, режим малой нагрузки колес.
При криволинейном перемещении рабочих органов поворотным рычагом сопротивление преобразуется в силу подачи вперед и торможения. Сопротивление рабочих органов проектируется на продольную ось и в зависимости от направления изменяет знак и значение силы, что достаточно для подачи вперед или удержания агрегата нажатием на тормоз до следующего расторможения и подачи вперед. Здесь подача и торможение легко регулируются изменением люфта и пружинами.
Уборка трав на сено, силос, травяную муку и уничтожение сорной растительности, сгребание до или после сушки возможны сменными рабочими органами реверсивного хода с образованием валиков около оси агрегата или на краю. Аналогично действуют рабочие органы при уборке камней, клубней и других материалов в одну или обе стороны.
Привод рабочего органа при кошении осуществляется от самоустанавливающегося колеса. Энергия реверсивного хода преобразуется во вращение ножа в одном направлении известной связью и свойством самоустанавливающегося колеса. Коническая зубчатая передача, струна или другая гибкая связь выгодна при большой ширине и без вала отбора мощности. Изгиб и кручение секции снижаются колесом-регулятором глубины путем их соединения с возможностью противоположного смещения колеса под действием сопротивления рабочих органов /по эффекту коромысла/.
Увеличение числа секций из 1-2 рабочих органов и ширины захвата пропорционально их числу и ходу повышает производительность. Снижением числа рабочих органов и длины хода создаются условия для использования мини-техники малой мощности. Число рабочих органов можно снизить увеличением длины их хода и ширины захвата. Там, где ширину захвата увеличить нельзя, выгодно увеличить число рабочих органов в секции и скорость движения.
Влекомость и самоперестановка дисковых рабочих органов в пространстве достигается вертикальным и горизонтальным шарнирами и ограничителями свободы поворота.
По сигналу регулятора. 22 регулируется расход топлива /мощность/ и тягами 23 сигнал передается гидрораспределителю 24 и коробке, если транспортный режим, регулируется нагрузка. При перегрузке колеса 28 регулируют глубину и выглубляют рабочие органы и предохраняют от поломки. После преодоления препятствия рабочие органы заглубляются и продолжают работу. Фиксатором 25 настраивают ось 26 колеса 28: допускают работу в режиме датчика курса и ограничителя поворота. Корпуса для прокладки, борозды и копирования обеспечивают слежение за бороздой и прокладку борозды для следующего прохода, т.е формируют траекторию движения агрегата по базовой линии, например, борозды. При использовании другой базовой линии используется иной датчик. Контур 35 защиты зоны перемещения рабочих органов и движения агрегата при контакте с препятствием воздействует на органы управления и останавливает рабочие органы или агрегат, например, выключением топлива или скорости и торможением в транспортном состоянии.
При крене трактора повороту вокруг оси 43 препятствует рычаг 44 и ось крена трактора вокруг центров площадей контакта колес переходит в линию, проходящую через центр контакта колес 28 технологического модуля с почвой. При крене трактора вокруг оси 43 рычаг 44 создает сопротивление опрокидыванию, и колеса 28 технологического модуля удерживают его от опрокидывания. В начале крена перераспределяются опорные реакции колес трактора, а затем колес технологического модуля. Большая ширина захвата агрегата используется для повышения устойчивости легкого трактора при работе в горной зоне и при возникновении неуравновешенных сил от рабочих органов поперечного хода. Повышение угла устойчивости трактора с βт до угла βа устойчивости технологического модуля достаточно для работы в любой зоне. Взаимодействие трактора и технологического модуля посредством контура защиты и ограничителями относительного поворота в сочетании с защитой рабочих органов повышает безопасность работы.
Для механизации и роботизации земледелия, обработки грунтов и других материалов при выполнении культурно-технических, дорожно-строительных, мелиоративных и других работ в различных отраслях служит система реверсивных рабочих органов, перемещение которых относительно энергосредства обеспечивает многократное повышение показателей работы техники. Такая система рабочих органов-инструментов многоцелевой машины включает:
- компоненты рабочих органов в виде поворотного отвала, ролика или крыла для оборота почвы вправо и влево или поочередно в обе стороны,
- рабочие органы, выполняющие различные работы при их перемещении в одну или обе стороны относительно энергосредства,
- секции рабочих органов - сменных инструментов и их компонентов, оси поворота которых смещены от центров сопротивлений и соединены с приводом с возможностью фиксации или поворота между ограничителями под действием сопротивления почвы или другим известным путем.
Смещение оси поворота отвала или рабочего органа и секции от центра сопротивления преобразует каждый компонент во влекомый (самоустанавливающийся, самоповоротный между ограничителями) под действием сопротивления почвы и способный работать при перемещении в одну или обе стороны без дополнительных рабочих органов /второго следа/ с возможностью совмещения функций лево- и правооборачивающих корпусов - преобразователей сопротивления в движущую силу на энергоемких процессах. На других работах рабочие органы могут минимизировать нагрузку колес путем уравновешивания сил взаимно-противоположного перемещения около трактора или на некотором удалении от него при дистанционной работе на опасных участках.
Обработка почвы реверсивными рабочими органами и их секциями корректируется ограничителями - регуляторами ширины захвата, скорости, мощности и производительности. Здесь правило регулирования скорости таково: скорость движения агрегата прямо пропорциональна ширине захвата секции или рабочего органа и обратно пропорциональна кратности повторения работ. Шаг между рабочими органами секции равен или больше радиуса крайней точки, т.е. отвал или корпус могут поворачиваться под действием сопротивления почвы между ограничителями, а после поворота секции - снизить проекцию шага на ось агрегата. Поэтому проекции рабочих органов на ось агрегата имеют ширину, соответствующую текущей необходимости и производительности.
Функции других рабочих органов также изменяются ограничителями поворота: дисковая борона преобразуется в лущильник, культиватор изменяет ширину междурядий до нуля, т.е. преобразуется в секцию сплошной культивации при большем угле.
Сменные реверсивные рабочие органы перемещаются возвратно-поступательно и выполняют различные работы, изменяют их, корректируя положение и скорость движения агрегата. Общим свойством сменных реверсивных рабочих органов является возможность поворота между ограничителями под действием сопротивления (фиг.3) или симметричность формы и возможность выполнения работ при рабочем ходе по одному или в различных сочетаниях при малой или нулевой нагрузке - тяговой силе колес. Это касается природосообразного действия, самоочистки, совмещения операций, подталкивания трактора или снижения тяговой силы и буксования колес до нуля при вспашке, бороновании, глубоком рыхлении, планировке, перемещении материалов, лущении, посеве, сгребании, прочесывании почвы, ее уплотнении, плоскорезной обработке, нарезке борозд, формировании гребней, кротовании, катковании, посадке, уборке кормов, корнеплодов, бахчевых, проведении культурно-технических, дорожно-строительных и других работ без: - ограничения производительности, - множества проходов, - увеличения числа колес и типов тракторов.
Новая концепция развития технологий и техники заключается в преобразовании известной системы машин для земледелия различных зон в систему многорежимных реверсивных сменных рабочих органов многоцелевой машины. Ввиду того что известная ровная вспашка и оборотные плуги имеют право- и левооборачивающие корпуса для поочередной работы и при любом рабочем проходе работают нижние корпуса, верхние совершают холостой ход и в конце участка корпуса поворачиваются вокруг горизонтальной оси на пол-оборота и рабочие органы меняются местами, масса и энергозатраты велики, режим работы по новому способу преобразуется поворотом рабочих органов и их секции вокруг вертикальной оси, причем угол поворота определяет режим функционирования: влияет на работу до уровня преобразования в режим другой машины, а при перемещении таких рабочих органов относительно энергоисточника преобразуется тормозной режим в ведущий. В каждом случае возможно регулирование сопротивления, и сочетание режимов снижает тяговую силу и буксование до нуля без ограничения ширины захвата агрегата. Снижение тягового сопротивления до нуля и получение движущей силы до 50% сопротивления создает резерв тяговой силы, значение которой можно регулировать адекватно сопротивлению настройкой ограничителей. Перевод в тормозной режим оправдан в режиме гашения избыточной силы, например, на уклоне. При уравновешивании ведущих и тормозных сил широкозахватного орудия поворачивающий момент и отклонения от курса не возникают. Это свойство легко стабилизирует движение и создает условия для управления путем использования поворачивающего момента для удержания от увода агрегата вниз по склону. Многорежимность повышает гибкость адаптивного управления в режиме полуагроробота применительно к внешним условиям. Изменение углов и сил, а также режимов создает условия для использования катков, тракторов, бульдозеров, грейдеров, погрузчиков и других средств в качестве носителей рабочих органов для повторения и активизации работ при очень малой массе и нулевой нагрузке колес.
Способ тяги оборотного плуга с поворотными вокруг вертикальных осей рабочими органами и секциями в тормозном режиме выгодно сочетать или преобразовать и использовать рабочие органы в ведущем режиме при перемещении относительно энергоисточника /трактора/. В ведущем режиме сопротивление преобразуется в движущую силу и многократно повышает удельную силу тяги без удвоения рабочих органов и поочередной работы.
Совмещение функций компонентов техники вообще и право- и левооборачивающих корпусов оборотного плуга, снижение числа рабочих органов в два раза, расширение функций и возможностей реверсивной работы в тяговом и тормозном режимах при ровной вспашке без ограничения мощности и производительности имеет общее решение, применимое для дисковых рабочих органов, легко создающих и регулирующих силы и сопротивления для их уравновешивания, а также автоматически регулирующих силы и сопротивления, и функции рабочих органов - режимы их перемещения. Силы и сопротивления имеют закономерную связь, и выбор режимов определяет и режим автоматического адаптивного саморегулирования без необходимости слежения за внешними условиями в поле при работе в режиме робота при регулировании нагрузки колес. Если избыток или недостаток сил многорежимных рабочих органов привести к колесам /оставить без уравновешивания/, то возникает зависимость показателей работы агрегата от тягово-сцепных свойств ходовой части. Такой режим целесообразно ограничить и минимизировать.
Автоматическое управление режимами работы многорежимных рабочих органов по сигналу регулятора дизеля и муфты сцепления - датчика нагрузки и средства управления агрегатом можно использовать для регулирования глубины и ширины захвата рабочих органов без изменения ширины захвата агрегата, которая не должна изменятся по нагрузке. Ширина захвата и базовая линия для автовождения могут быть постоянными у агрегата любой мощности и производительности.
Функции компонентов техники сочетаются с возможностью преобразования режима работы или применяя дополнительные обратные связи на основе совмещения режимов работы элементов агрегата. При выполнении работ режимными рабочими органами перемещение твердого материала в одном направлении при строительстве дорог, дамб и т.д. преобразуют в противоположное перемещение при рытье траншей, каналов и при борьбе с наводнением. Аналогичное перемещение рудного и других материалов при промывке руды, обработке каналов и рек при различном повторении работ без увеличения числа рабочих органов и проходов агрегата повышает универсальность, замена полевой доски плуга или трения лопаты, а также почвы о почву, грунта о грунт рабочим органом в другом режиме снижает энергозатраты.
Твердые материалы требуют обработки путем снижения бокового и вертикального сопротивлений, снижения ширины захвата рабочего органа по мере повышения глубины при послойной обработке почвы и грунтов. Векторное действие на почву ослабляется с глубиной и при перемещении грунта более чем на 3 м. Перемещение материала по принципу вспашки снижает энергозатраты бульдозера за счет снижения сжатия, частично заменяет клиновое действие рабочих органов /тупиковое состояние/ или преобразует в разрыв связей, крошение и перемещение в сторону меньшего сопротивления.
Модель оценки режимных рабочих органов включает резание лезвием, лобовое и боковое давление, трение, подъем почвы перед рабочим органом, сопротивление перемещению, обороту и сообщение энергии. Давление почвы
 ,
,
где а, b, h - основания и высота сечения аналогично трапеции,
c, ρ - толщина пласта и плотность почвы или грунта.
Нелинейная зависимость от глубины служит основанием для перехода от известного принципа к новому пути решения проблем воздействия техники на почву.
Режимность придает системе рабочих органов многоцелевой машины много новых свойств, качеств и достоинств, к которым относятся такие, как преемственность конструкции, технологий, опыта производства и использования известных материалов, существующей базы и освоенной техники без ее недостатков и проблем развития,
- применимость с различными энергоисточниками во всех зонах земледелия и в других отраслях, под и над водой, дистанционно в опасной зоне, в огне при пожаротушении, на неудобицах и др. разработках,
- сочетаемость интересов и целей производителей, поставщиков, пользователей, ремонтников и других лиц от освоения до утилизации,
- активность или эффективность, превосходящая мировой уровень по всем показателям полезности, перспективности и защиты среды,
- снятие всех ограничений мощности и производительности машин, неограниченные возможности развития технологий и роботизации,
- сменность, оборотность и адаптивность к условиям эксплуатации,
- сочетаемость ведущего, тормозного и нейтрального режимов работы,
- повторяемость работ без увеличения числа рабочих органов и проходов агрегата по полю, а также возможность регулирования повторений,
- снижение энергозатрат и уплотнения почвы, сопротивления рабочих органов и потерь влаги, выполнение работ путем преобразования сопротивления в движущую или тормозную силу без перегрузки колес,
- независимость движущих и тормозных сил от нагрузки колес машин,
- уравновешиваемость сил и сопротивлений рабочих органов и машины,
- минимизируемость ущерба колес, числа типов колес и гусениц машин,
- эффективность использования материалов, энергии, земли, воды, времени /агросроков/ и возможностей машины и местности всех зон,
- гибкость изменения и плавность преобразования функций, сменность элементов, самоочищаемость, многофункциональность; сочетаемость функций рабочих органов, секций, машин и агрегатов; регулируемость ширины, хода, скорости, повторности, нагрузки, направления работы /к оси, от оси/ при перемещении почвы, грунта и урожая; экологичность, производность моделей, природеполезность работы.
Зависимость мощности, производительности и эффективности производства и применения известной техники в любой /и горной/ зоне земледелия от силы /тягово-сцепных качеств, типа ходовой части, металлоемкости, ширины захвата/, скорости движения /числа проходов, уплотнения почвы, энергозатрат/, времени работы /агросроков, влажности, проходимости и погоды/, рельефа местности /крутизны склона, расположения поля и высоты над уровнем моря/ отрицательно влияет на динамику, управляемость, проходимость, устойчивость, плавность хода и качество работы машин. Это и большое разнообразие типов тракторов и сельскохозяйственных машин к ним, потери до 80% энергии при почвообработке, причинение теряемой энергией большого ущерба ресурсу и почве, трудности коррекции функций, комбинирования орудий, повторения операций, обработки влажной почвы, эргономическая и экологическая опасность работы, низкая эффективности защиты человека, техники и агроэкосистемы и использования земли в горной зоне требует поиска прорывного пути повышения эффективности использования металла, энергии, земли, ресурса, влаги и времени.
Новым путем комплексного решения проблем повышения производительности является перемещение реверсивных рабочих органов /инструментов/ относительно трактора или иного энергосредства с возможностью преобразования их сопротивления в машинную силу и изменения основных показателей при малой нагрузке ходовой части.
Перемещение реверсивного рабочего органа вперед на ширину его захвата соответствует одному рабочему ходу. При обратном ходе этот процесс повторяется. При этом параметры агрегата изменяются иначе.
Закономерная связь между временем t рабочего хода на длину l, скоростью Vp перемещения рабочих органов, подачей вперед на их ширину захвата Шp и скоростью V движения агрегата при выполнении работ без огрехов, пропусков и повторений обработок характеризуется зависимостями: t=l/Vp=Шp/V; Шp/l=V/Vp; l=Ш=ШpVp/V; Ш/Шр=Vp/V,
где Ш - ширина захвата одной секции агрегата.
Из этих зависимостей вытекают важные правила, условия и законы, изменяющие представление о механизации земледелия, например ширина захвата агрегата и длина хода рабочих органов не зависят от мощности двигателя и тяговой силы трактора. Ширину захвата агрегата с легким трактором можно повысить более 10 раз. Скорость перемещения рабочих органов определяется видом и качеством работы и не зависит от тяговой силы трактора, буксования колес и ширины захвата агрегата. Скорость движения агрегата прямо пропорциональна ширине захвата рабочих органов. Скорость движения агрегата во столько раз ниже скорости выполнения работ, во сколько раз ширина захвата рабочего органа или секции ниже его хода относительно трактора. Ширина захвата агрегата во столько раз выше ширины захвата рабочих органов, во сколько раз скорость выполнения работы выше скорости движения агрегата. Увеличение скорости движения агрегата, мощности и производительности возможно повышением числа секций рабочих органов и снижением их хода при заданной ширине захвата. При оптимальной ширине захвата агрегата и скорости выполнения работы /перемещения рабочих органов/ можно изменить ширину захвата секций, скорость движения агрегата и мощность двигателя. Увеличение длины хода рабочих органов /ширины захвата агрегата/ без увеличения числа секций снижает массу на метр захвата, число проходов по полю, уплотнение почвы, опасность и потери энергии, ресурса, урожая и плодородия. Большая ширина захвата характерна для тихоходного агрегата любой мощности. Скорость движения агрегата снижается пропорционально увеличению хода рабочих органов. Ширина захвата рабочего органа, угол его установки, сопротивление и нагрузка двигателя изменяются без изменения хода и ширины захвата агрегата. Это создает условия для коррекции функций, основных параметров и создания агрегатов различной производительности и регулирования нагрузки двигателя.
Скорость движения агрегата V /фиг.16, 17, 18/ зависит от скорости перемещения Vp, ширины захвата Шр и длины хода l рабочих органов и коэффициента повторности Кп работ:
V=Vp·Шp/lKп; l=Ш/П,
где Ш, П - ширина захвата и число секций агрегата.
Здесь скорость выполнения и коэффициент повторности работ задаются с учетом качества процесса, числа секций, ширины захвата рабочих органов, мощности двигателя и производительности.
Ширина захвата агрегата определяется кратно ширине поля изменением числа секций, длины хода и угла поворота α линии:
Ш=Пlcosα.
Скорость перемещения рабочих органов и ширину захвата нужно скорректировать с учетом условий местности, крутизны склона, влажности почвы. Скорость движения агрегата можно автоматически регулировать прерыванием потока мощности к колесам на любой передаче. Дискретная подача и торможение для удержания при воздействии толкающей силы снижает потери на трение тыльной стороны рабочих органов о почву, повышает качество оборота почвы и точность прямолинейности хода рабочих органов.
Сопротивление рабочих органов Рc преобразуется в движущую силу Р и минимизирует нагрузку колес: Р=Рc·Кc, где Кc - коэффициент преобразования сопротивления в движущую силу, подталкивающую агрегат. Избыточную силу выгодно снизить сочетанием активных и пассивных рабочих органов, установкой катков, колес, дисков и совмещением операций, функций ходовой части и рабочих органов с возможностью уравновешивания действий бортов, снижения нагрузки ходовой части, буксования, числа проходов и количества движения без ограничения мощности и производительности:
Np=Pc·Vp; Pc=ШрКр; W=Vp·Pc·t,
где Кp - коэффициент удельного сопротивления рабочих органов.
Для снижения числа проходов трактора по полю и уплотнения почвы в 15-30 раз реверсивные рабочие органы подаются вперед практически независимо от тягово-сцепных свойств преобразованием внешнего сопротивления в машинную силу и снижением буксования до нуля.
Совмещение функций элементов техники и повторение работ машин в земледелии открывает неисчерпаемые возможности для автоматизации. Скорость движения агрегата и подача рабочих органов вперед в зависимости от мощности, производительности, типа энергосредства, вида работ и необходимости их повторения, условий местности, крутизны склона и других факторов определяется по одному из следующих способов: 1) непрерывно при низкой (0,2-1 км/ч) скорости движения включением ходоуменьшителя, 2) дискретно силой или по сигналу упора при замедленном движении агрегата, 3) дискретно прерыванием потока мощности трансмиссией и управлением тормозами любого энергосредства без ходоуменьшителя, 4) дискретно подталкиванием агрегата (лопатой, диском, упором, гибкой тягой на крутом склоне) без ходоуменьшителя, трансмиссии и телескопического кардана известных тракторов.
Непрерывная подача в два раза снижает скорость и производительность. При этом в два раза повторяются работы без дополнительных проходов агрегата по полю. Это открывает высокоэффективное направление повторения работ при минимальном числе проходов агрегата по полю малым числом рабочих органов, а также использования толкающей силы рабочих органов и повышения уровня роботизации.
Повторение работ может компенсировать трудность выхода в поле до схода влаги, когда возникает необходимость в дообработке почвы (крошении комков, бороновании, лущении и даже в перевозке груза). Выполнение работы в несколько раз за один проход агрегата не требует выбора новых направлений движения и базовых линий автовождения.
Непрерывное замедленное движение и повторение работы не требует перемещения технологического модуля относительно энергосредства по сигналу конечного упора или дискретного движения агрегата.
Подтягивание технологического модуля и удержание до следующего сигнала упора при медленном движении энергосредства и односледовой обработке /без повторения работ/ с возможностью удвоения скорости движения и производительности обеспечивается рычагом - регулятором подачи в зависимости от ширины захвата рабочих органов или их секции, тягами, свободный ход которых изменяется и другими способами. Такой способ допускает применение тракторов с ходоуменьшителем.
Прерывистое движение всего агрегата включением муфты и удержанием тормозком исключает потребность в ходоуменьшителе. Прерывание движения возможно объемной муфтой, муфтой в коробке, механизмом поворота гусеничной машины на любой передаче. Клапаны в гидролинии переключения скоростей на ходу упрощают подачу без средств подтягивания технологической машины. При этом карданная передача не изменяет длину. Переключение энергопотоков для поочередного перемещения и подачи рабочих органов возможно насосом - делителем потока энергии между осями, энергосредством и рабочими органами.
Подталкивание легкого агрегата лопатой, диском, колесом по сигналу или силой конечного упора не требует воздействия на трактор. Метод допускает подачу гибкой тягой на склонах большой крутизны и по принципу канатной тяги.
Рабочие органы подаются вперед в конце или в начале хода или в конце и в начале с возможностью минимизации перекрытия проходов и затрат энергии.
Прицеп с люфтом допускает регулирование подачи, требует гибкой связи с гидросистемой энергосредства. Любой способ подачи допускает автовождение и уравновешивание сил и моментов рабочих органов.
Повторение лущения, боронования, рыхления, уплотнения и других работ каждым рабочим органом за один проход агрегата снижает массу и число проходов трактора многократно и создает условия для развития технологий и техники. Такая проблема нуждается в пояснении и обосновании нового пути ее решения.
Мировой уровень развития технологий и техники характеризуется тем, что нужное состояние почвы и распределение посевного материала и удобрений достигается множеством проходов агрегатов для вспашки, лущения, боронования, культивации, уплотнения, посева, внесения удобрений автономно или в сочетании, в одном или различных направлениях (по диагонали, поперек загона и т.д.), причем совмещение операций установкой соответствующих рабочих органов в несколько рядов снижает ширину захвата. Механические технологии замещаются химическими, и используется фрезерование, в несколько раз повышающее энергозатраты.
Повторение проходов узкофункциональных широкозахватных или узкозахватных комбинированных агрегатов увеличивает уплотнение почвы и обостряет проблемы производительности, экономики, экологии, материалов и энергосбережения и роботизации земледелия. Это объясняется тем, что каждый рабочий орган за один проход агрегата выполняет свою работу один раз. Это в несколько раз снижает ширину захвата и многократно повышает массу и число проходов агрегата. Тяговая сила и масса ограничивают КПД и производительность, ширина захвата увеличивается пропорционально числу рабочих органов, массе и сопротивлению. Поэтому производительность, КПД и эффективность зависят от тягово-сцепных качеств колес и имеют низкие показатели, а узкие функции и множество классов тяги требуют большое число машин, которые составляют целую систему.
Основой нового принципа повышения эффективности техники является повторение работ без дополнительных проходов агрегата по полю перемещением реверсивных рабочих органов относительно трактора и изменением скорости или положения рабочего органа. Новый метод таков: каждый рабочий орган повторяет свою работу до достижения целевого /желаемого/ состояния почвы, грунта и других материалов за один проход трактора в наилучшее время, повышая ширину захвата, гибкость технологий, производительность и эффективность использования земли, металла, энергии, времени, влаги и удобрений без увеличения числа рабочих органов, массы, тяговой силы и нагрузки колес на энергоемких операциях в любой (и горной) зоне.
Кратность повторения работ зависит от ширины Шp и длины хода l рабочего органа, и скоростей перемещения Vp поперек оси, и движения агрегата V, т.е.
Кп=ШрVp/l·V.
Здесь соотношение скоростей выполнения работ и движения агрегата легко регулируются. Отношение ширины захвата рабочих органов к их ходу связано с числом секций рабочих органов и мощностью.
Практически повторность выполнения работ легко регулируется выбором ширины и изменением подачи вперед с учетом вариаций условий местности, возделываемой культуры и вида работ. Известные методы повторения работ установкой второго ряда дисков, катков могут быть использованы для получения ряда машин различной производительности и мощности. Повторение работ бульдозера перемещением лопаты относительно трактора снижает число проходов трактора в других отраслях. Отсюда вытекает правило: работу можно повторять многократно и адекватно снижению скорости движения агрегата.
Ширина захвата агрегата ограничена не силой тяги трактора, а мощностью двигателя. Ограничение мощности снимается изменением длины хода рабочих органов. Потому возможности неисчерпаемы.
Потребность пользователей техники в повторении работы - функций рабочих органов изменением скорости движения не имеет предела. При снижении скорости движения агрегата до нуля с учетом требований технологий, зон и отраслей режим работы приближается к стационарному, и коэффициент повторения возрастает бесконечно. Такое многократное повторение рыхления, перемещения грунтов при строительстве дорог, траншей, гидротехнических сооружений; рекультивации полей, защите среды, заполнении траншей, обработке опасных полей, недоступных трактору мест, склонов, придомовых и придорожных участков необходимо для повышения эффективности и уровня механизации и роботизации процессов. Бесконечное повторение работ требуется при резании и перемещении материалов на стационаре, где работа прерывается надолго и не требует автономного энергосредства.
Снижение коэффициента повторения работ от единицы /однократной работы без огрехов/ до одной десятой или сотой доли соответственно в десять или сто раз повышает просвет между следами. Это полезно для осушения, полива, кротования, нарезки борозд и арычников, широкорядного распределения материалов, глубокого рыхления при освоении новой земли после корчевки леса и кустарников, при подготовке почвы для первой обработки.
Площадь обработки - производительность повышается снижением повторений воздействий рабочих органов. Установка нескольких рабочих органов /совмещение операций/ снижает потребность в повторении работ при большой ширине и малой нагрузке колес путем уравновешивания их сопротивлений. Поэтому оптимальным способом выполнения работ будет тот, который снижает число рабочих органов и проходов, количество движения, расход энергии и времени.
Повышение коэффициента повторения работ при большой ширине решает много проблем механизации и роботизации земледелия и других отраслей.
Известный принцип совмещения функций и операций, комбинирования орудий, фрезерования почвы и повторения различных работ ограничивает эффективность использования металла, энергии, земли, ресурса, влаги и времени. Степень воздействия комбинированных рабочих органов на почву и уровень совмещения операций ситуативно не регулируется, комбинирование орудий повышает металлоемкость и расход энергии. С увеличением мощности и плотности почвы проходимость трактора и потери влаги возрастают и недостатки обостряются.
Возможности совмещения операций расширяются при использовании реверсивных рабочих органов и низкой скорости движения (фиг.16, 17, 18) широкозахватного агрегата. Для оптимальной скорости выполнения работ Vp ширины захвата агрегата - времени поперечного хода рабочих органов можно определить скорость движения, число проходов агрегата и площадь уплотнения. Повторение операций возможно изменением ширины захвата Шр, числа и скорости перемещения рабочих органов, скорости движения агрегата (фиг.17). Если однократное воздействие на почву недостаточно, возникает необходимость в дообработке /крошении комков, прочесывании почвы, бороновании, лущении и т.д./, то работу повторяют легко снижением до 4 раз (линия 1-4) скорости движения агрегата без дополнительных проходов по полю.
Реверсивные рабочие органы совмещают операции и повторяют работы без ограничения ширины захвата. Это создает условия для унификации энергетических модулей различной мощности и производительности и перехода от известной системы машин к многоцелевой машине со сменными реверсивными рабочими органами для работы в любой /и горной/ зоне без ограничения производительности. Преобразование сопротивления в машинную силу и глубины почвообработки в подачу рабочего органа повышает гибкость технологических процессов, управляемость и безопасность роботизации повторения работ.
Перемещение рабочих органов относительно энергоисточника с возможностью преобразования сопротивления в движущую силу и снижения тяговой силы при выполнении различных работ снижает или исключает зависимость мощности и производительности от массы (сцепной и тяговой сил 9, ширина захвата агрегата не зависит от класса трактора), скорости, агросроков, влажности, погоды, типа ходовой части, буксования, числа колес и осей, балласта, уплотнения почвы и др. факторов.
По новому принципу работы число рабочих органов II, длина их хода l, скорость V, м/c перемещения, ширина захвата Шр, число функций Ф и повторений работ К и подача ΔS за один проход формируют производительность:

Здесь Ф/К - "функция в раз" имеет конкретное значение: лущение, боронование и т.д. в 2 или 3 раза за один проход агрегата.
Сочетать и повторять операции нужно с учетом вида работы и производственной необходимости без увеличения нагрузки колес и числа проходов по полю.
По ширине захвата рабочих органов и их скорости производительность:
где S - путь, пройденный агрегатом,
Ш - ширина захвата агрегата.
Номограмма для Ф=1 дана на фиг.18А, Б с учетом измерения скорости в м/с, числа секунд в часе (3600) и 10000 квадратных метров в гектаре - отношения 3600/10000=0,36.
Увеличение числа функций возможно и без увеличения числа типов рабочих органов, т.е. изменение функций возможно изменением режима работы рабочих органов. В концевых точках функции обеспечиваются перекрытием проходов и установкой рабочих органов шагом, меньшим хода. Здесь число рабочих органов зависит от прочности привода.
Мобильной машиной управляют с учетом реакций местности, курса и устойчивости в транспортном режиме и степени повторения работ или преобразования технологического сопротивления в силу при обработке земли.
Землю обрабатывают адаптивно повторяя функции рабочих органов реверсивного хода широкозахватного агрегата в зависимости от внешних условий изменением скорости движения. Избыток или недостаток обработки поля устраняют, техпроцесс стабилизируют изменением скорости, положения рабочих органов. В тяговом режиме нагрузку двигателя стабилизируют изменением числа ведущих колес или схемы соединения потребителя с двигателем без сложных трансмиссий /муфт, коробок скоростей, главных и бортовых передач, дифференциалов или механизмов поворота гусеничных машин/.
Рабочие органы тормозят энергосредства при высокой скорости, переводят ходовую часть в нейтральный режим при средней скорости движения и толкают избыточной движущей силой при малой скорости. В каждом случае сочетаются функции и режимы рабочих органов и ходовой части.
Ходовая часть энергосредства - источник тяговой силы при транспортном режиме на повышенной скорости переходит в нейтральный режим при средней скорости и в тормозной - при низкой скорости. В каждом случае соотношение скоростей перемещения рабочих органов и движения машины определяет режим (ведущий, нейтральный), кратность повторения, полноту оборота, пласта и запашки биомассы, степень /коэффициент/ преобразования сопротивления рабочих органов в движущую силу. Высокая скорость однократного выполнения работ переходит в режим частичного повторения, затем в повышение повторности пропорционально снижению скорости до нуля при стационарной работе.
Плуг с отвалом изменением угла установки легко преобразуют в рыхлителя, лущильника, борону, нарезчика борозд и грядок, распределителя удобрений, планировщика движителя высокой проходимости, т.е. изменением настройки преобразуют вспашку в рыхление, лущение, боронование, нарезание борозд и гряд, внесение удобрений, планировку полей и в движение.
При выполнении и повторении различных работ рабочие органы подают вперед преобразованием части рабочего хода в продольное перемещение пропорционально ширине захвата рабочих органов с возможностью выполнения технологических процессов до желаемого уровня. Аналогично настраивают дисковый плуг и используют в режимах бороны и лущильника для обработки земли до желаемого состояния. Рабочая технологическая скорость перемещения рабочих органов определяется в соответствии с качеством работы, а она ниже скорости известных агрегатов.
Снижение масс (на порядок), скорости движения агрегата, динамических нагрузок в трансмиссии и ходовой части, кинетической энергии, колебаний курса и нагрузок благоприятно влияет на все эксплуатационные качества.
Скорость движения агрегата преобразуется в параметр регулирования кратности повторения работ и преобразования сопротивления рабочих органов в движущую силу, оборота пласта, энергии избыточной силы приводу рабочих органов, режимов работы ходовой части и рабочих органов. Такое решение функции коробки скоростей гармонирует с регулированием скорости и тяговой силы на транспорте.
Саморегулирование сопротивления рабочих органов, самопреобразование сопротивления в движущую силу в ведущем режиме и согласование /по настройке/ с подачей агрегата вперед стабилизирует нагрузку, мощность, частоту вращения и крутящий момент.
Снижение массы в несколько раз и скорости движения на порядок, кинетической энергии на два порядка, количества движения и числа проходов улучшает соответственно экологические и эргономические качества, снижает частоту переключения скоростей, нагрузку водителя и потери энергии времени и производительности.
Возможности регулирования оборота пласта, запашки биомассы, влажности агросроков и кратности обработки; числа и типов операции; нагрузки, производительности по площади и состоянию /целесообразной производительности в конкретной ситуации; массы, ширины захвата, скорости, числа проходов активности рабочих органов; компактности машины в транспортном положении велики.
В ряде случаев повышение производительности по повторности обработки земли полезнее производительности по площади. Поэтому целесообразно сочетать производительность по площади /га/ с кратностью обработки /раз/.
Несопротивляющиеся колесам плуги, лущильники, бульдозеры, бороны и т.д. реализуют способ обработки влажной земли - преобразуют ущерб /потери воды, времени, энергии/ в пользу /урожай, производительность, качество жизни/.
Исходные значения скорости, ширины, длины хода и числа рабочих органов /секций/ задаются. Скорость движения машины используют для регулирования толкающей силы, повторности работы, режима работы рабочих органов и ходовой части /ведущий, нейтральный, тормозной/. При непрерывной подаче вперед возможен режим подачи энергии толкающей силы на вход привода.
Снижая скорость движения агрегата и число проходов по полю повышают коэффициент преобразования сопротивления в движущую силу и кратность повторения работ. При заданной скорости поперечного перемещения рабочих органов, снижая скорость движения, преобразуют тормозной режим в нейтральный и ведущий.
Скорость движения машины влияет на степень оборота пласта, повышение скорости рабочих органов и толкающей силы способствует обороту пласта, форма крыла определяется при настройке. Сменные крылья решают вопрос проще.
Повышение движущей силы, кратности повторения работ, управляемости без увеличения числа колес или гусениц, ног без сложной трансмиссии /снижая массу и потери энергии/ достигнуто расширением функций колес.
Установка носка отвала бульдозера, зубьев крошения земли при обратном ходе руки, установка лопат эстафетного перемещения материала повышает эффективность технологий и машины.
Степень замещения функций ходовой части и рабочих органов повышают несколькими способами.
1. Перемещением рабочих органов поперек и назад относительно энергомодуля. При этом рабочие органы подают агрегат вперед, если их сопротивление в продольной плоскости выше сопротивления подачи вперед. Поперечное перемещение рабочих органов преобразует в продольное и обработку почвы преобразует в подачу вперед путем установки их на поворотном параллелограммном рычаге с возможностью плоскопараллельного движения /аналогично планкам мотовила/. В процессе такого движения степень преобразования сопротивления в силу изменяется: по мере приближения к краю поперечное сопротивление полностью преобразуется в продольное по направлению и многократно возрастает по значению /рабочий ход переходит в подачу, шаг которой определяется ограничителями местом реверса/. Здесь (функции рабочих органов и толкателей чередуются, шаговое движение руками замещает функции ходовой части без дополнительных толкателей.
Технико-экономическим эффектом выбора режимов работы, гибкого преобразования сопротивления рабочих органов в продольную силу, расширения функций и областей использования является переход от однофункциональных и однорежимных рабочих органов и системы машин к многофункциональным рабочим органам и машине - заменителю более 100 орудий - формирование нового направления совмещения функций компонентов техники, развития механизации и роботизации технологий.
Изменение, сочетание и регулирование функций рабочих органов и секций, снижающих нагрузку ходовой части и потребности в тракторах различного класса тяги повышает работоспособность в горной зоне, повышает эффективность использования металла, земли, энергии, влаги, агросроков и конкурентоспособность механических технологий.
Унификация двигателя, трансмиссии, ходовой части, механизмов управления и торможения без ограничения сил и сопротивлений рабочих органов ходовой частью составляет новое направление повышения производительности пропорционально только прочности привода рабочих органов. Повышение уровня унификации с учетом интересов различных зон и отраслей - охват тракторов, катков, бульдозеров, автомобилей и др. машин решает многоотраслевые проблемы.
Рабочее оборудование - привод многорежимных сменных активных реверсивных и нереверсивных рабочих органов для выполнения различных работ в земледелии и в отраслях обработки грунтов, руд и других целей материалов расширяет и обобщает функции с учетом целей производителей и пользователей техники. Это облегчает эффективное использование освоенной техники, повышение уровня проектируемой и дальнейшее повышение уровня механизации и роботизации земледелия и других отраслей машиной - заменителем отраслевых систем для всех зон.
Переход от работы в тормозном режиме к работе в ведущем и нейтральном режимах перемещения рабочих органов обеспечивает адекватное регулирование режимов работы ходовой части и открывает неисчерпаемые возможности развития цивилизации.
Источники информации
1. Агрегат, пат. 2101893, БИ №2, 1998 г. Автор Гаджимурадов И.М.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2222129C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2226326C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЧВООБРАБАТЫВАЮЩИМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090992C1 |
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2094970C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ И АГРЕГАТ ДЛЯ ЗЕМЛЕДЕЛИЯ | 1992 |
|
RU2092001C1 |
Изобретение относится к агромашине для обработки земли и выполнения других работ. Агромашина содержит рабочие органы реверсивного хода и привод для их перемещения относительно энергосредства. Регулятор скорости и расхода топлива/мощности (регулятор дизеля) энергосредства соединен с механизмом ручной коррекции курса с внешней стороны агрегата, а через привод рабочих органов и вал отбора мощности с муфтой сцепления - датчиком нагрузки - с силовым регулятором и подъемником орудий, впереди которого смонтирован контур защиты трактора с рычагами. Это позволяет согласовать скорости рабочих органов и агромашины для достижения цели обработки земли. 6 з.п. ф-лы, 18 ил.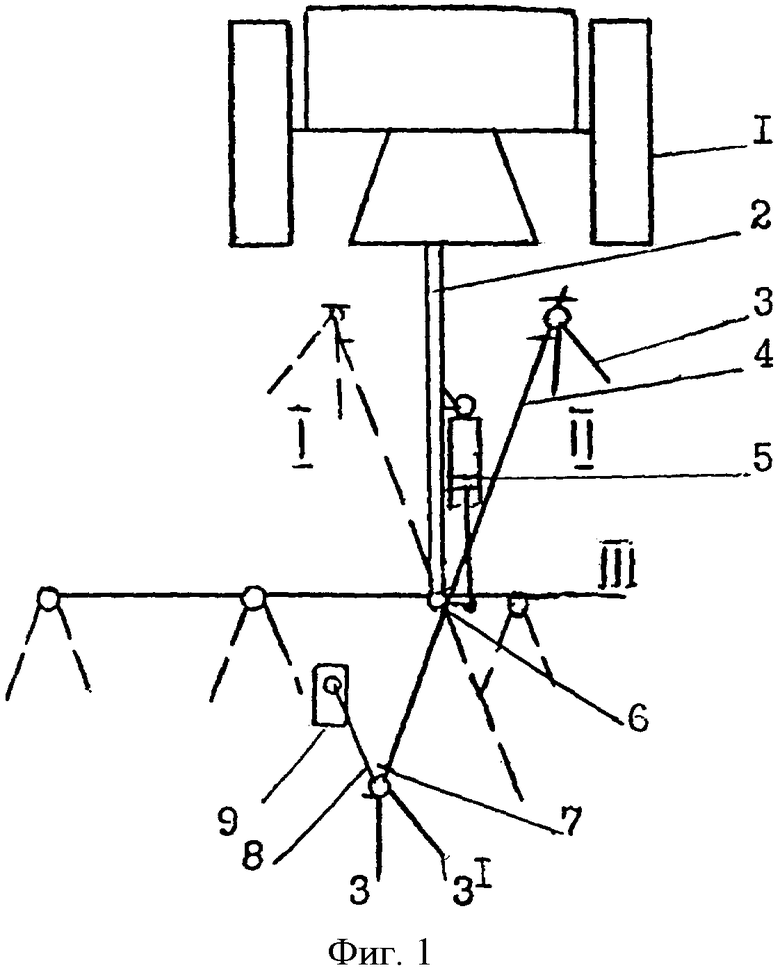
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086083C1 |
| Устройство для силового управления положением навесного орудия трактора с дизелем | 1976 |
|
SU646945A1 |
| Почвообрабатывающее орудие | 1987 |
|
SU1521317A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 0 |
|
SU312559A1 |
| RU 94015810 A1, 27.09.1996 | |||
| DE 19627136 A, 08.01.1998. | |||

