Изобретение относится к сельскохозяйственному машиностороению, к способу и системе управления сельскохозяйственным агрегатом при обработке виноградников и междурядий других культур.
Известны способ и устройство для вождения сельскохозяйственных агрегатов и обработки междурядий виноградников и других культур (авт. св. N 1142018, кл. А 01 В 69/04). Способ предусматривает копирование линии полива и разворот в конце. Устройство содержит датчик отклонения машины от направляющей канавки, усилительно исполнительные элементы и технологическое оборудование. Копирование рядков винограда без поливных каналов затруднено.
Известны способ и устройство для автоматического вождения сельскохозяйственной машины (авт. св. N 829000, кл. А 01 В 69/04). Датчик кинематически связан через усилитель с механизмом управления движителями. Поворот в конце гона обеспечивается центром на конце стрелы. Датчик и стрела содержит звено в виде параллелограммного механизма.
Известен способ и устройство для обработки виноградной лозы и сельскохозяйственный агрегат (авт. св. N 1547726, кл. А 01 В 39/28), включающий копирование линии различия свойств почвы до и после обработки почвы и постоянной технологической колеи. Рабочие органы культиватора установлены с просветом, соединены шарнирно с рамой и посредством рулевого механизма с усилителем механизма поворота.
Прототипом изобретения является способ и устройство для автоматического вождения сельскохозяйственной машины, включающие систему поворота направляющих колес по сигналу датчика отклонения от направляющей канавки и разворота машины в конце направляющей канавки. Катки датчика отклонения установлены последовательно по ходу движения в тележке, вертикальная ось которой расположена на уровне оси движителей и снабжена фиксатором.
Недостатком прототипа являются то, что необходима исправная сеть каналов полива, что затрудняет обработку багарного виноградника. Сигнал об изменении курса не компенсирует релейность, запаздывание и инертность исполнительных элементов. Все это требует повышения точности вождения, увеличивает затраты на строительство и ремонт каналов для полива при обработке виноградников. Целью изобретения является обеспечение водждения и разворота агрегата в конце ряда винограда.
Поставленная цель достигается тем, что столб в конце каждого ряда использован в качестве центра разворота, контрольным параметром является расстояние от центра агрегата до столбов в конце гона с правой и левой сторон поочередно, в начале контролируют и устраняют ошибки отклонения от курса, затем от базовой линии рядка, в конце гона от конечного столба, в каждом случае энергию между колесами распределяют по курсу и реакциям почвы, часть выходного сигнала управления обратным знаком на вход управления подают направляющими колесами, при этом движение колес обеспечивают по следу рабочих органов встречного рабочего хода.
Система управления агрегатом при обработке виноградников содержит приводы колес и орудий встречного движения и датчики курса, соединенные с копиром центра поворота - конечного столба в ряде виноградника.
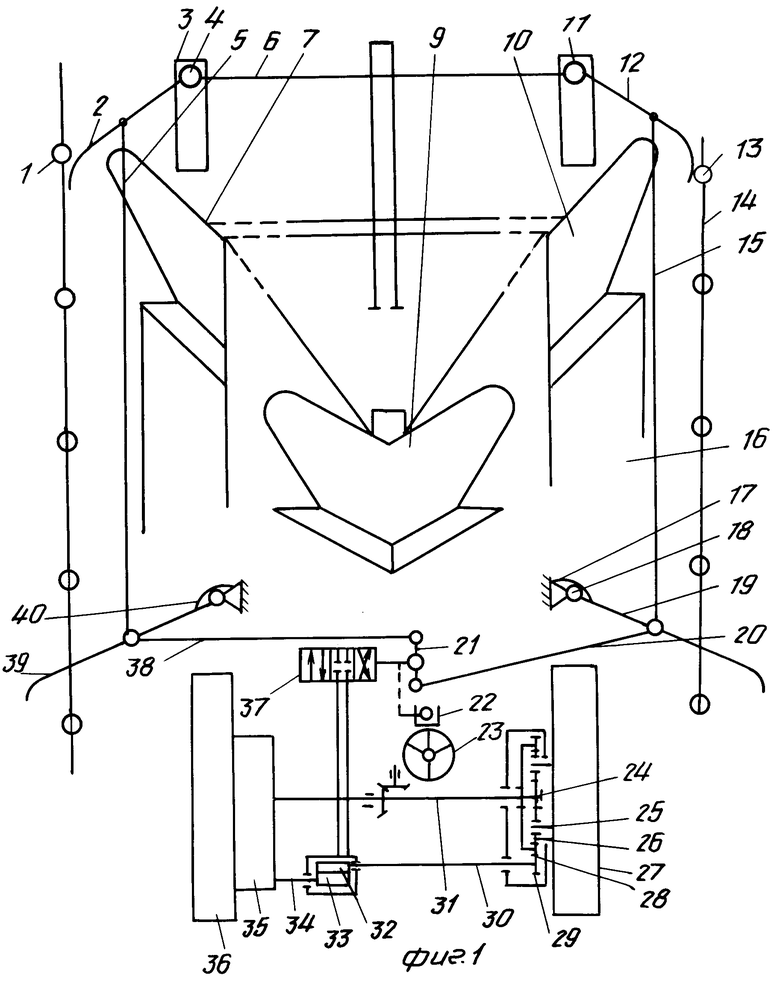
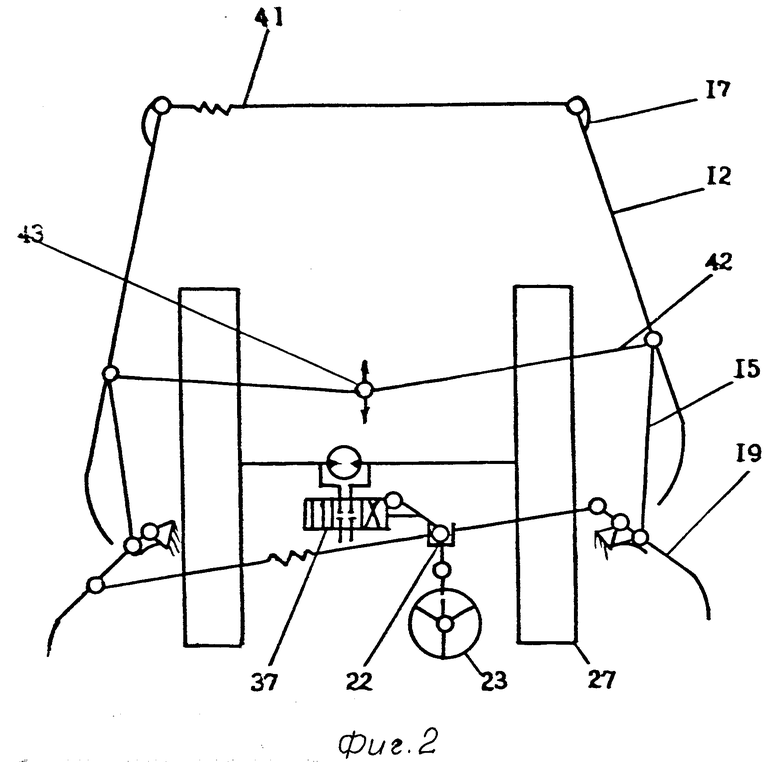
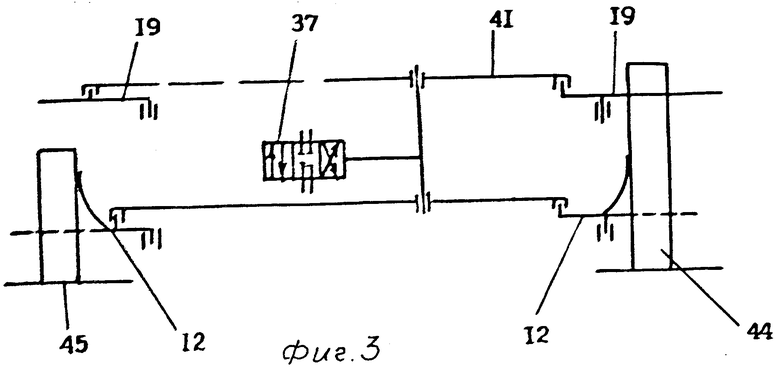
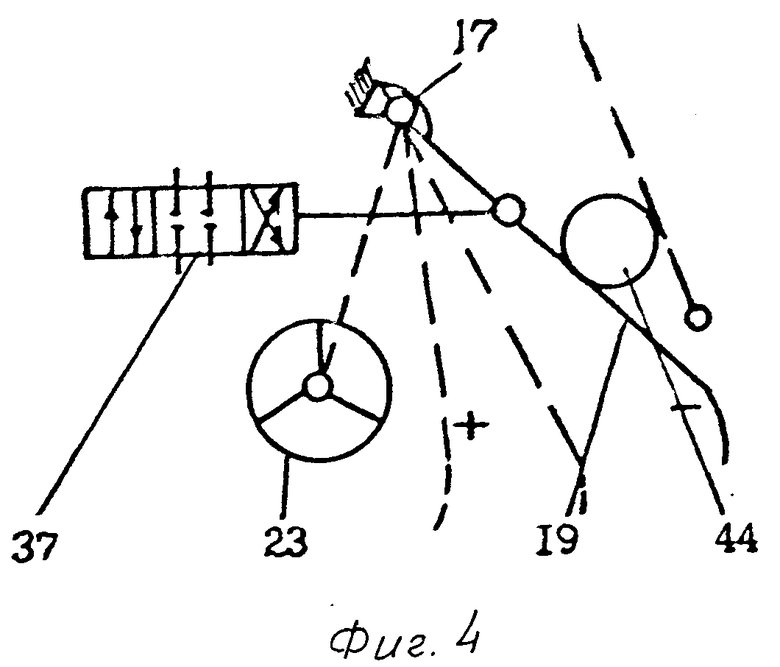
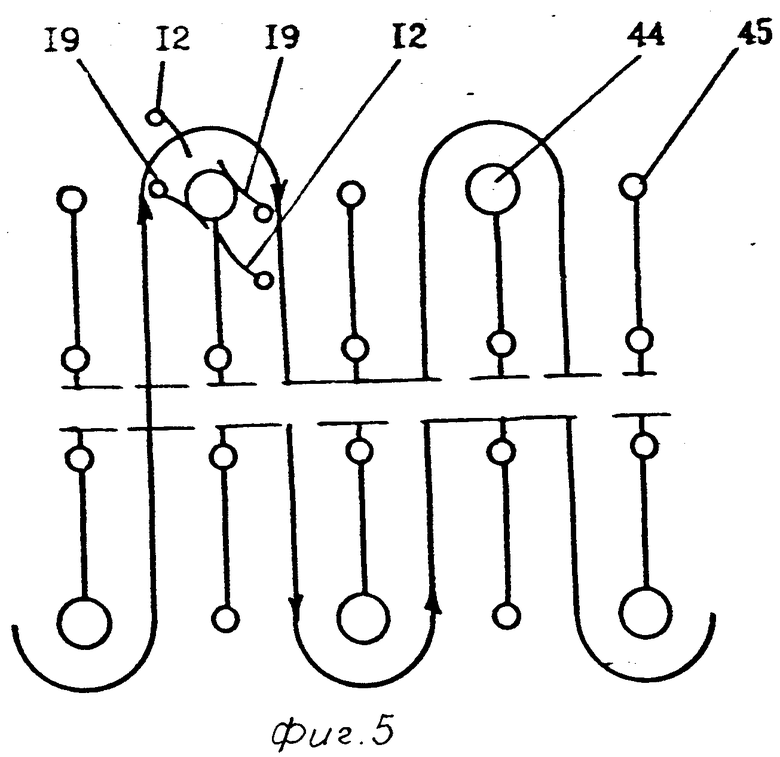
На фиг. 1 изображена схема системы для осуществления способа управления агрегатом с рабочими органами возвратно-поступательного продольного движения относительно трактора; на фиг. 2 - схема установки датчиков упреждающей информации об изменении курса и фиксированного поворота в конце гона; на фиг. 3 - схема установки датчиков в поперечно-вертикальной плоскости; на фиг. 4 - схема получения информации для фиксированного поворота вокруг конечного столба ряда виноградника; на фиг. 5 - схема формирования траектории движения по междурядиям виноградника.
Способ осуществляется системой, включающей ряд столбов 1, связанных шпалерной проволокой и виноградной лозой, копиры 2 направляющих колес 3, вертикальные оси 4 которых смещены вперед от центров площадей контакта с почвой и соединены тягами 5 и мостом 6, относительно которого цепью или иным приводом 7 перемещается орудие с листерным корпусом 9 и правооборачивающим корпусом 10, правое колесо 11 с копиром 12 ряда столбов 13 и проволоки 14 с лозой, тягу 15 связи, дно 16 борозды для качения колес, пружины 17 около шарнира 18 копира 19, связанного тягой 20 с дифференциальным рычагом (коромыслом) 21 с рулевой сошкой 22 и колесом 23. Входом планетарного бортового редуктора является солнечная шестерня 24, выходом - водило 25 с сателлитами 26 привода колеса 27. Коронная шестерня 28 через шестерню 29 и вал 30 составляет второй вход и дополняет механический поток первого входа через вал 31 трансмиссии гидравлическим от шестерни 32 гидромотора, вторая шестерня 33 которой валом 34 управляет редуктором 35 второго колеса 36. Гидрораспределителем 37 можно управлять и тягой 38 связи с копиром 39 и пружиной 40 второго борта.
Тяга 41 (фиг. 2) с упругой пружиной и тяга 42 связаны с рычагом 43 коробки передач для отвода копиров при движении назад.
Копиры 19 взаимодействия с высокими столбами 44 (фиг. 3) в конце гона установлены выше, чем копиры 12 ряда низких столбов 45, с возможностью получения сигнала об ошибке от столба 44 (фиг. 4), использования для управления агрегатом при формировании траектории движения между рядами (фиг. 5) копирами 12 и фиксированного разворота в конце гона копирами 19.
Рядки составляют базовую линию, в границах между которыми допускается движение агрегата. Копиры 2, 12, 19 и 39 дают сигналы исполнительным элементам 22-37 регулировать разность скоростей бортов. При реверсе их можно выключить тягами 42 и рычагом 43. Концы копиров 12 изогнуты вниз или вверх от земли с возможностью обеспечения постоянного контакта с шпалерной проволокой в ряде без лозы. Копиры 19 (фиг. 3) установлены выше столбов ряда и нижнего одного конечного столба и могут сигналам приближения + (фиг. 4) и удаления (-) поддержать радиус поворота и формировать всеми копирами вместе траекторию, изображенную на фиг. 5.
Копиры установлены около рядков, соединены тягой 38 с гидрораспределителем 37 усилителя и могут давать ритмические импульсы постоянной частоты, а пружины 17 и 40 возвращают золотник в положение отрицательного сигнала при удалении от целевой траектории и центра поворота.
В усилителе импульсы, идущие справа и слева, могут сравниваться, при этом отсутствие разницы может восприниматься как свидетельство нормального положения агрегата относительно рядков. При отклонении от оси рядков 1 и 13 изменение положения агрегата может привести к тому, что сигналы, поступающие с одной стороны, увеличиваются, а с другой уменьшаются, причем их разность пропорциональна углу отклонения. Усилитель может воспринимать эту разность как свидетельство отклонения от положения равновесия и дать сигнал исполнительным элементам устранить его. Датчики курса соединены с рычагом коробки передач с возможностью отвода копиров от рядков при движении назад.
Система работает следующим образом.
При движении между рядами 1 и 13 копиры 2 и 12 и колеса 3 и 11 реагируют на отклонение от курса и проволоки 14: при уходе агрегата вправо увеличивается сигнал от правых копиров и колес, снижается от левых. Разность сигналов передается тягами 5 и 15 или одной из них исполнительным элементам механизма поворота до устранения ошибки ухода вправо. При уходе влево датчики дают сигнал исполнительным элементам повернуть вправо и устранить ошибку. Это обеспечивает копирование рядков и дна 16 борозды. Пружины противодействуют повороту копиров, формируют сигнал об уходе от целевого состояния и дают сигнал для поворота до достижения заданного по настройке положения. Аналогично работают установленные на осях копиры 19 и передают сигналы тягой 20 коромыслу 21. Возможен поворот сошки 22 и колеса 23. В каждом случае относительно скорости солнечной шестерни 24 скорость водила 25, сателлитов 26 и колес 27 корректируется коронной шестерней 28, шестерней 29 и валом 30. Суммирование скоростей валов 30 и 31 с учетом знака (направления), механического потока с гидравлическим от гидромашины обеспечивает регулирование потоков энергии к колесам 27 и 36 по курсу и реакциям почвы.
Система реализует способ управления так, что в начале контролирует и устраняет ошибки об отклонении от курса, затем - ошибки об отклонении от базовой линии (рядка) и центра поворота. Механический и гидравлические приводы колес вместе увеличивают скорость и энергию привода колеса с учетом формы траектории и текущего значения коэффициента сцепления колеса с почвой. Возможное изменение плотности почвы, радиуса качения и разности скоростей бортов система воспринимает как ошибку и дает сигнал гидромашине скорректировать ведущий момент и скорость. При хорошем сцеплении с почвой забегающего колеса скорость и ведущий момент однозначно увеличиваются, скорость отстающего колеса снижается, в каждом случае ведущие моменты распределяются пропорционально реакциям почвы.
Столб в конце каждого ряда является центром поворота (разворота) по сигналам верхнего копира. Контакт копира с этим столбом дает сигнал начать поворот, сигналы в сторону (+) и (-) обеспечивают коррекцию траектории поворота, причем поворот продолжается до начала копирования ряда датчиками курса (копирами 2 и 12 и колесами 3 и 11). Возможно ограничение угла поворота угломером, потерей контакта копира 19 или 39 со столбом и другими известными средствами. В любом случае разворот по круговой траектории происходит поддерживая радиус поворота равным половине захвата агрегата и половине ширины междурядия виноградника. Скорость движения при развороте регулируется известными способами и средствами. Упреждение сигнала об изменении курса достигнуто выносом датчика курса вперед. Высоту столбов 44 и 45 и установки копиров на агрегате подбирают с учетом высоты ряда от земли. Траектория движения агрегата и технологическая колея при выполнении сельскохозяйственных работ остается постоянной. Это снижает площадь уплотнения, приращение плотности, сопротивление движению и энергозатраты (буксование).
При использовании предложенного способа и системы управления агрегатом обеспечивается вождение между рядами и разворот агрегата в конце гона без сложных сооружений и дорогостоящих систем, замещающих функции человека. Это открывает путь автоматизации вождения и разворота без участия человека при выполнении опасных для жизни операций опрыскивания и опыливания ядами и другими химикатами. Формирование траектории по технологической колее снижает затраты энергии и экологическую опасность.
Использование: в сельскохозяйственном машиностроении, в частности в способах и системах управления агрегатом для обеспечения вождения на винограднике и разворота агрегата в конце ряда виноградника. Сущность изобретения: способ предусматривает установку столбов в конце каждого ряда виноградника в качестве центра разворота. В качестве базовой линии используют расстояние от агрегата до столбов с правой и левой сторон поочередно. Сначала контролируют и устраняют отклонения агрегата от курса, затем от базовой линии в конце ряда от конечного столба. Система управления агрегатом содержит приводы колес и орудий и датчики курса, соединенные с копиром центра поворота - конечного столба в конце каждого ряда виноградника. 2 с. и 2 з.п. ф-лы, 5 ил.
| Устройство для автоматического вождения сельскохозяйственной машины | 1982 |
|
SU1142018A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
