Изобретение относится к физической культуре и спорту и может быть использовано в качестве тренажера для общей физической подготовки спортсменов и населения.
Известен спортивный снаряд, содержащий массивную часть, рукоятку и соединительное устройство в виде троса на барабане (авт.св. СССР N 1340769, кл. А 63 В 23/02, 1986).
Недостатком известного устройства является сложная регулировка троса и ограниченность силовых воздействий во время тренировок.
Известно также устройство для тренировки, содержащее грузовой элемент с двумя опорными поверхностями на торцах, рукоятку, стержень с торцовыми фланцами, один из которых соединен с рукояткой, и две пружины, одна из которых установлена между первым торцовым фланцем стержня и первой опорной поверхностью грузового элемента, а другая - между вторым торцовым фланцем и второй опорной поверхностью [1].
Недостатком известного устройства является малая степень комфортности в процессе тренировки, обусловленная затруднительной инициацией колебаний грузового элемента и, ударами грузового элемента о рукоятку, сильным шумом, а также несоответствием характера колебаний массивной части оптимальным (рациональным) нагрузкам занимающегося во время тренировки.
Целью изобретения является повышение комфортности занятий за счет одновременного снижения шума, облегчения инициации колебаний грузового элемента, выполненного в виде тела вращения и обеспечения соответствия характера колебаний силовым нагрузкам занимающегося.
Поставленная цель достигается тем, что устройство содержит грузовой элемент с двумя опорными поверхностями на торцах, стержень с торцовыми фланцами, один из которых соединен с рукояткой, и две пружины, одна из которых установлена между торцовыми фланцами стержня и опорным поверхностями грузового элемента. Каждая пружина выполнена винтовой, конусообразной, с монотонно изменяющимся профилем, меньший торец которой жестко связан с обращенным к нему торцовым фланцем стержня, а широкий - с грузовым элементом, при этом жесткость каждой из пружин в равновесном и крайних положениях грузового элемента определена соотношением:
С = 2 B ˙ a ˙ k/[0,37P - (b + l + S)], где В, Р и k - постоянные, численно равные соответственно среднему весу человека, кг, среднему росту человека, см и коэффициенту пропорциональности веса груза весу человека;
а - постоянная, соответствующая перегрузке грузового элемента при колебаниях, причем для равновесного положения грузового элемента а = 2-4, а для крайних а = 7-10;
b - разность между общей длиной устройства для тренировки и расстоянием между узкими торцами пружин, см;
l - расстояние между опорными поверхностями грузового элемента, см;
S - суммарная длина пружин в сжатом состоянии, см; при соблюдении условия:
10 < [0,37P - (b + l + S)] < 50.
В устройство может быть введена вторая рукоятка, соединенная с вторым фланцем стержня. Между фланцем стержня и соприкасающимся с ним торцом пружины установлен амортизатор в виде выполненного из эластичного материала полого цилиндра. Рукоятка соединена с фланцем стержня посредством шарнира, ось которого перпендикулярна оси стержня.
В устройстве с одной рукояткой грузовой элемент может быть выполнен в виде стакана с двумя внутренними цилиндрическими рабочими поверхностями, одна из которых охватывает стержень, а другая, не соединенная с рукояткой, - фланец стержня, и установленных на стакане грузов, при этом ближняя к рукоятке пружина размещена снаружи стакана, а дальняя - внутри.
Между каждой опорной поверхностью грузового элемента и соответствующей пружиной установлены соединенные с грузовым элементом перемещаемые по ней вдоль оси стержня упоры.
Устройство может быть снабжено закрывающим грузовой элемент и пружины кожухом, установленным между торцовыми фланцами стержня.
В местах установки пружин на торцах фланцев стержня и опорных поверхностях грузового элемента могут быть выполнены кольцевые проточки с пазами, например, в сторону увеличения радиуса пружин на грузовом элементе и в сторону уменьшения - на фланцах для крепления пружин.
Пружины могут быть выполнены с переменным шагом, изменяющимся, например, прямо пропорционально изменению их диаметра.
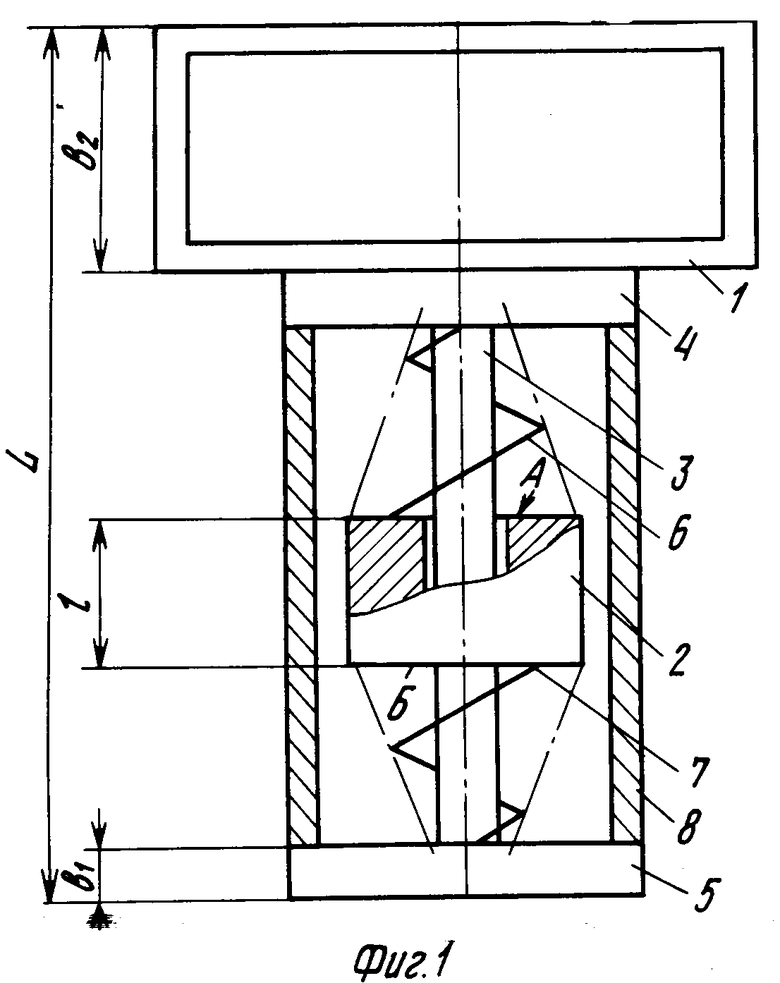
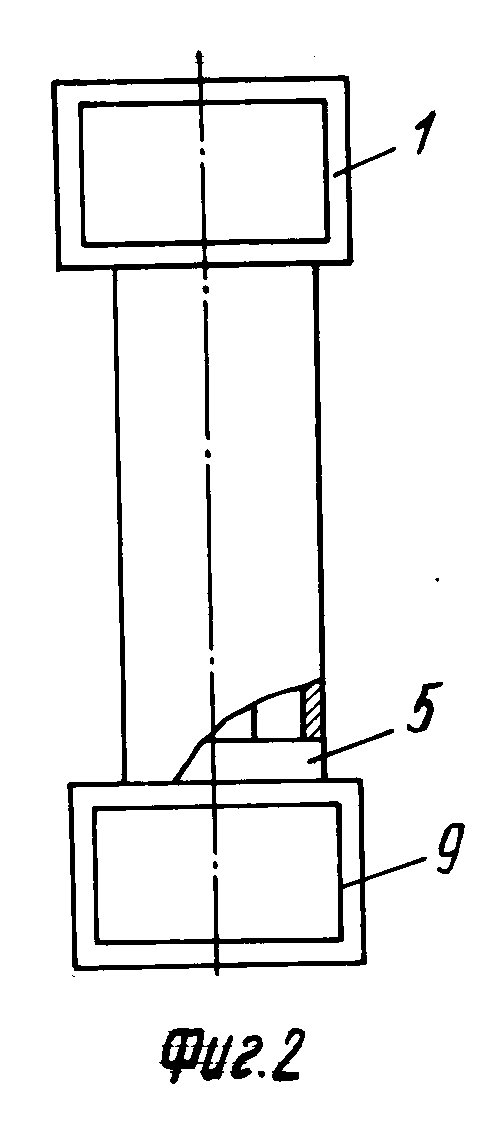
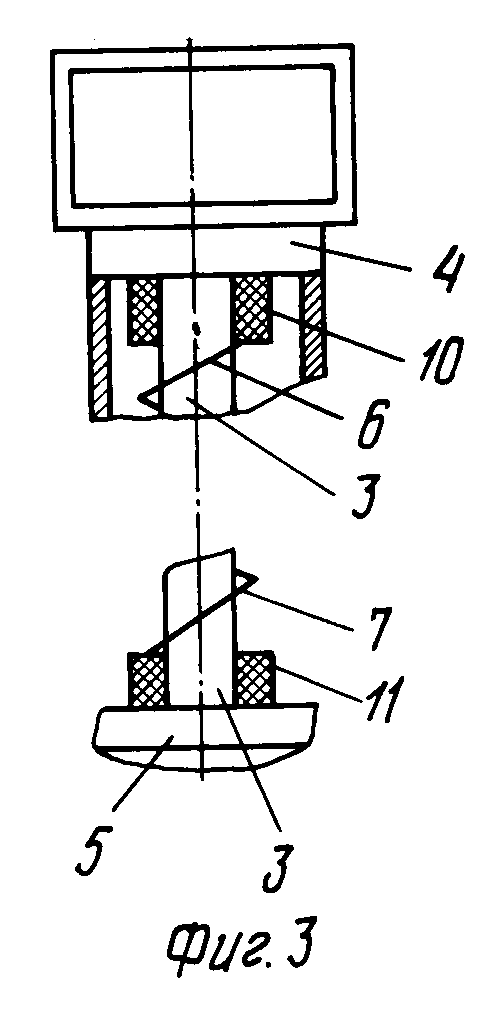
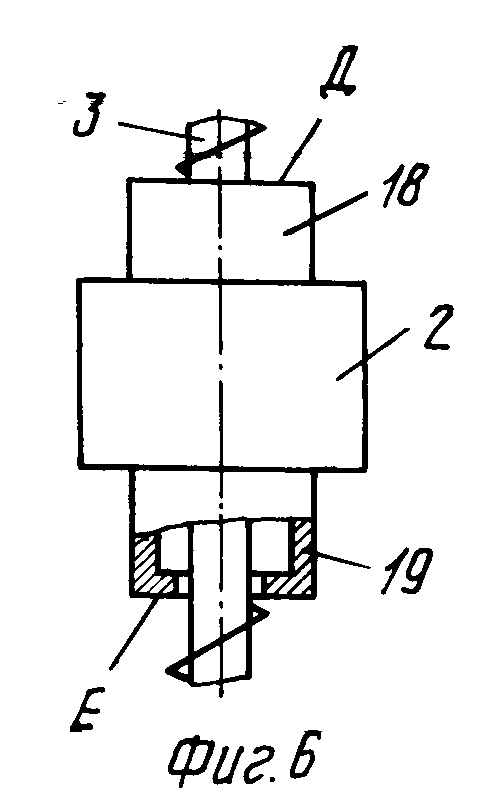
На фиг. 1 представлен общий вид динамической гантели с одной рукояткой; на фиг. 2 - то же, с двумя рукоятками; на фиг. 3 - размещение амортизаторов в гантели; на фиг. 4 - шарнирное соединение рукоятки с фланцем стержня; на фиг. 5 - грузовой элемент, выполненный в виде стакана и грузов; на фиг. 6 - грузовой элемент с упорами; на фиг. 7 - установка пружин в кольцевые проточки на фланцах стержня и опорных поверхностях грузового элемента.
Динамическая гантель содержит рукоятку 1, грузовой элемент 2 с опорными поверхностями А и Б, стержень 3 с фланцами 4 и 5, винтовые конусообразные пружины 6 и 7 с монотонно изменяющимся профилем и кожух 8 (см.фиг.1). Рукоятка 1 соединена с фланцем 4 стержня 3. Пружина 6 установлена между фланцем 4 и опорной поверхностью А грузового элемента, а пружина 7 - между фланцем 5 и опорной поверхностью Б. Грузовой элемент 2 имеет возможность ограничиваемого пружинами 6 и 7 перемещения по стержню 3. Пружины 6 и 7 жестко соединены с фланцами 4 и 5 соответственно своими меньшими торцами, а с грузовым элементом 2 - широкими. Кожух 8 установлен между фланцами 4 и 5 и закрывает грузовой элемент 2 и пружины 6 и 7.
Для обеспечения заданных характеристик силовой нагрузки, т.е. индивидуальной дозировки нагрузки занимающегося в соответствии с его физическими и функциональными возможностями, вид пружин 6 и 7 дополнительно ограничен требованием определенной жесткости С каждой пружины в равновесном и крайних положениях массивной части 2 в пределах (0,05-0,1) рабочего хода.
С = 2В ˙ a ˙ k [0,37P - (b + l + S)], (1) где В, Р и k - постоянные численно равные соответственно среднему весу человека, кг, среднему росту человека, см и коэффициенту пропорциональности веса груза весу человека;
а - постоянная, соответствующая перегрузке массивной части при колебаниях;
b - разность между общей длиной устройства и расстоянием между меньшими торцами пружин;
l - расстояние между опорными поверхностями грузового элемента;
S - суммарная длина пружин в сжатом состоянии при соблюдении условия:
10 < [0,37P - (b + l + S)] < 50 (2)
Соотношение (1) вытекает из следующих соображений. Исходя из опыта занятий со спортивными снарядами подобного типа установлено, что оптимальные значения:
- габаритного размера снаряда, в данном случае - длины (см) устройства, ограничено отношением расстояния от пола до руки к росту Р (см) человека, для мужчин 619/1678 = 0,369, для женщин 584/1567 = =0,372. Принимаем длину устройства L = =0,37 Р; чтобы исключить задевание пола (запас - половина длины вытянутой ладони);
- веса снаряда, в данном случае веса F (кг) грузового элемента 2, ограничено весом (кг) человека;
F = (0,03 - 0,005) В;
- коэффициента пропорциональности k = 0,03-0,05 выбираются, исходя из соблюдения условий комфортности занятий и достижения при необходимости значительных усилий, обеспечивающих тренировочный эффект, при этом малые значения коэффициента k рекомендуются преимущественно для женщин и подростков, средние - для практически здоровых людей, а большие - для спортсменов;
- значения перегрузки грузового элемента, определяемые величины а, выбираются в пределах а = 2-10.
Малые значения а в пределах а = 2-4 относятся к колебаниям грузового элемента и около равновесного положения на интервале (0,05-0,1) длины рабочего хода. Это является условием легкой и устойчивой инициации колебаний грузового элемента, которое определяет начальную жесткость пружин в равновесном положении и характеризует их работу вблизи этого положения.
Область максимальных значений коэффициента а в пределах а = 7-10 определяет жесткость пружин в крайних положениях грузового элемента (при полной длине ее хода).
С учетом того, что сила сжатия пружин равна силовому воздействию грузового элемента, т.е. с учетом равенства:
C x h = F ˙ a, где h - длина рабочего хода от равновесного до крайнего положения, и с учетом геометрических соотношений фиг.1:
b = b1 + b2;
2h = L - (l + b + S), где b1, b2 - расстояния между меньшими торцами пружин и концами гантели;
S - суммарная длина обеих пружин в сжатом состоянии;
l - расстояние между опорными поверхностями грузового элемента;
L - длина гантели, по приведенным выше зависимостям формируется соотношение (1).
Поскольку пружины одинаковой жесткости могут быть выполнены из проволоки различного диаметра, то другие конструктивные параметры пружин не конкретизируются и могут быть выбраны по соответствующим справочным формулам и таблицам.
Таким образом, условие монотонного изменения жесткости пружин по их длине и выражение (1) определяют граничные значения жесткости пружин для обеспечения комфортности работы устройства в противоречивых условиях:
- пружины должны быть жесткими для безударного восприятия инерционных перегрузок (верхние значения коэффициента а);
- пружины должны быть мягкими для легкой инициации колебаний (нижние значения коэффициента а).
Расположение пружин большим диаметром к грузовому элементу создает условия для снижения шума, т.к. в зоне больших скоростей массивной части витки пружин большого диаметра не касаются стержня 3, что существенно снижает уровень шума.
В зоне неподвижного конца пружин, где происходит соприкосновение их витков со стержнем, относительные скорости последних невелики и шум не возникает.
Устройство для тренировки может быть снабжено второй рукояткой 9 (см. фиг. 2), соединенной с фланцем 5 стержня 3. При этом плоскости рукояток 1 и 9 должны совпадать.
На фланцах 4 и 5 стержня 3 со стороны соответствующей опорной поверхности (А или Б) грузового элемента 2 могут быть установлены амортизаторы 10 и 11, выполненные из эластичного материала в виде полых цилиндров и размещенные соосно стержню 3 (см.фиг.3).
Рукоятка 1 может быть соединена с фланцем 4 посредством шарнира, ось которого перпендикулярна оси стержня 3 (см.фиг.4). В этом случае рукоятка 1 снабжена цапфами 12, а фланец 4 расположен вдоль оси стержня 3 в виде бобышки 13 с посадочными отверстиями 14. Кроме того, бобышка 13 снабжена фиксатором 15, исключающим возможность проворота рукоятки 1 относительно бобышки 13. Такое же соединение может быть реализовано в креплении рукоятки 9 к фланцу 5 в устройстве с двумя рукоятками, при этом требование совпадения плоскостей рукояток заменяется требованием параллельности осей их шарниров.
Грузовой элемент 2 может быть выполнен в виде стакана 16 с двумя внутренними рабочими поверхностями В и Г и груза 17 (см.фиг.5). При этом удаленный от рукоятки 1 фланец 5 стержня 3 выполнен в виде поршня и охвачен рабочей поверхностью В стакана 16, а сам стержень 3 охвачен рабочей поверхностью Г стакана 16 (посадка поверхностей В и Г - подвижная). Пружина 6 установлена снаружи стакана 16, а пружина 7 - внутри стакана 16.
Грузовой элемент 2 может быть снабжен верхним 18 и нижним 19 упорами (см.фиг.6), внешние торцы которых имеют опорные поверхности Д и Е для опоры пружин 6 и 7 (поверхности В и Г в этом случае выполняют функции опорных поверхностей грузового элемента 2). Упоры 18 и 19 имеют возможность установочного перемещения по грузовому элементу 2 вдоль оси стержня 3.
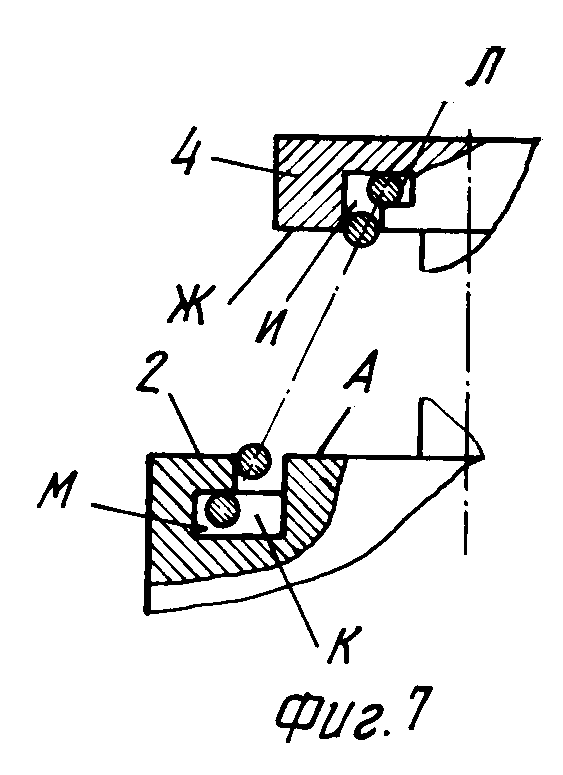
На поверхности Ж фланца 4, обращенной к пружине 6, и на опорной поверхности А грузового элемента 2 могут быть выполнены кольцевые проточки И и К с пазами Л и М, например, в сторону увеличения радиуса пружины на грузовом элементе 2 и в сторону уменьшения - на фланцах (см.фиг.7). Ширина пазов Л и М должна превышать диаметр проволоки пружины 6, а внутренний и внешний диаметры проточек И и К должны обеспечивать посадку в них соответствующих концов пружины с натягом.
Аналогичные проточки могут быть выполнены на фланце 5 и поверхности Б. Пружины 6 и 7 могут быть выполнены с переменным шагом.
Принцип действия динамической гантели заключается в следующем.
Занимающийся держит динамическую гантель за рукоятку 1 (при наличии второй рукоятки 9 - и за нее) и совершает ей из различных положений качательные движения. В заданной точке траектории занимающийся может активизировать гантель путем импульсного (резкого) движения динамической гантели на себя или от себя. При этом нарушается равновесие пружин 6 и 7, что вызывает колебания грузового элемента 2 относительно равновесного положения. В результате колебания грузового элемента занимающийся испытывает колебательные (близкие к гармоническим) силовые воздействия со стороны рукоятки 1, амплитуда которых определяется величиной начального импульсного движения (силой рывка), а частота - жесткостью пружин 6 и 7. Каждое колебание оказывает воздействие на биомеханический аппарат человека, вызывая его адаптацию как к отдельным колебаниям, так и ко всей серии колебаний. Возникающий в этом случае волновой процесс обмена энергией между занимающимся и динамической гантелью наиболее эффективно способствует согласованию действий всех звеньев биомеханического аппарата занимающегося.
При достаточно резких начальных движениях, а также при вторых импульсах в процессе колебаний пружины 6 и 7 могут полностью сжиматься. В этом случае возможны резкие удары грузового элемента по рукоятке 1 (рукоятке 2), что резко снижает комфортность занятий и сбивает ритм упражнений. Увеличение жесткости пружин 6 и 7 на всем интервале их рабочего хода с целью исключения резких ударов привело бы к значительному ухудшению инициации колебаний грузового элемента, уменьшению их частоты и увеличению требуемой для инициации силы рывка.
Выполнение в данном устройстве пружин 6 и 7 в виде винтовых с монотонно изменяющимся профилем обеспечивает монотонное увеличение их жесткости по мере удаления грузового элемента от равновесного положения и приближение его к фланцам 4 и 5 стержня 3 (рукояткам 1 и 9), что, в свою очередь, обеспечивает легкую инициацию колебаний грузового элемента 2 на участках в окрестности равновесного положения, где жесткость пружин мала, и одновременно исключает резкие удары о фланцы 4 и 5 вследствие большой жесткости пружин на крайних участках рабочего хода.
Кроме того, выполнение пружин 6 и 7 в виде винтовых конусообразных с монотонно изменяемым профилем приводит к тому, что колебания массивной части не вызывают стуков пружин из-за отсутствия при сжатии пружин одновременного контакта между соседними витками, что снижает общий уровень шума и также способствует повышению комфортности занятий за счет того, что вход в контакт смежных участков пружин осуществляется непрерывно путем перехода с витка большего диаметра на виток меньшего диаметра.
Кожух 8 закрывает подвижные части динамической гантели, что исключает возможность травматизма. Выполнение кожуха 8 в виде закрытого цилиндра одновременно уменьшает общий уровень шума во время занятий (звуки от подвижных частей ослабляются) и дополнительно улучшает гашение резких перемещений грузового элемента 2 на крайних участках рабочего хода вследствие демпфирования (поршневого эффекта), т.е. также способствует повышению комфортности занятий.
Амортизаторы 10 и 11 смягчают удары грузового элемента 2 по фланцам 4 и 5 в аварийных ситуациях, например, при изломе пружин, что исключает возможность травматизма даже в аварийных случаях.
Поворачивающаяся в цапфах 12 рукоятка 1 позволяет выполнять с гантелью сложные исполнительные движения с точным направлением по оси стержня 3 и визуальным контролем точности исполнения, что расширяет число видов выполняемых с устройством упражнений. Ограничение взаимного положения рукоятки 1 и бобышки 13 посредством фиксатора 12 исключает возможность травматизма на начальных стадиях занятий (при обучении).
Выполнение грузового элемента 2 в виде стакана 16 и груза 17 позволяет сместить центр масс груза на самый конец стержня 3, т.е. максимально удалить центр масс от рукоятки 1, тем самым предельно увеличив диапазон прикладываемых к pукоятке 1 крутящих моментов. Такой вариант конструкции усиливает отклик устройства на силовые воздействия занимающегося, не совпадающие с осью стержня 3 (при неизмененности габаритов устройства).
Введение в конструкцию грузового элемента части 2, перемещаемых при установке упоров 18 и 19, позволяет проводить регулировку натяга пружин 6 и 7, а также регулировку равновесного положения массивной части 2 на стержне 3. Выдвижение вверх упора 18 смешает равновесное положение массивной части 2 вверх, а выдвижение вверх упора 19 смещает это положение вниз. Одновременное смещение упоров 18 и 19 в разные стороны на одинаковую величину изменяет натяг пружин (без изменения равновесного положения). Регулировка равновесного положения грузового элемента 2, как указывалось выше, позволяет регулировать отклик устройства на угловые движения и тем самым настраивать его для различных режимов занятий. Регулировка натяга пружин 6 и 7 позволяет исключить свободное перемещение грузового элемента 2 по стержню 3 при ослабленных пружинах.
Выполнение винтовых пружин с переменным шагом позволяет обеспечить сокращение габаритов пружин и всего устройства.
Таким образом, совокупность новых признаков динамической гантели позволяет реализовать самые различные силовые колебательные воздействия на человека в процессе занятий, причем обеспечивает значительное, по сравнению с известными устройствами, повышение комфортности за счет одновременного облегчения инициации колебаний грузового элемента, исключения резких ударов грузового элемента по торцовым фланцам и снижения шума во время занятий при заданных характеристиках силовых нагрузок, т.е. обеспечении индивидуальной дозировки.
Учет антропометрических данных в конструкции устройства позволяет осуществлять подбор устройства с соответствующими характеристиками для различных категорий занимающихся.
Предлагаемая конструкция динамической гантели и ограничения допустимого диапазона изменения параметров как всего устройства, так и его отдельных деталей, создают комфортные условия для занятий, выражающихся в учете антропометрических и весовых характеристик человека, а также в снижении шума и повышении безопасности работы с гантелью, что создает возможность для широкого применения его в оздоровительной работе с различным контингентом населения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРЕНИРОВКИ МЫШЦ СПИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2173196C1 |
| УСТРОЙСТВО ДЛЯ ОЗДОРОВИТЕЛЬНОГО ВОЗДЕЙСТВИЯ НА ОРГАНИЗМ ЧЕЛОВЕКА | 2013 |
|
RU2536716C1 |
| Биомеханическое устройство для тренировки тяжелоатлетов | 1988 |
|
SU1567225A1 |
| Устройство для тренировки | 1990 |
|
SU1734792A1 |
| Диск тяжелоатлетической штанги Агашиных | 1984 |
|
SU1194431A1 |
| УСТРОЙСТВО ДЛЯ БИОМЕХАНИЧЕСКОГО ВОЗДЕЙСТВИЯ НА ОРГАНИЗМ ЧЕЛОВЕКА | 2011 |
|
RU2501589C2 |
| Устройство для тренировки спортсменов | 1983 |
|
SU1319875A1 |
| Устройство для тренировки братьев Агашиных | 1982 |
|
SU1245322A1 |
| Способ контроля качества спортивных инструментов и устройство для его осуществления | 1980 |
|
SU931202A1 |
| Доска трамплинная для прыжков в воду | 1990 |
|
SU1811873A1 |


Сущность изобретения: динамическая гантель содержит грузовой элемент, который выполнен в виде тела вращения с опорными поверхностями на торцах, стержень, соосно установленный в его полости, с торцовыми фланцами, один из которых соединен с рукояткой, и две винтовые конусообразные пружины с монотонно изменяющимся профилем. Пружины установлены между торцовыми фланцами стержня и грузовым элементом. Меньший торец каждой пружины соединен с торцовым фланцем стержня, а больший с грузовым элементом. Жесткость каждой пружины в равновесном и крайних положениях грузового элемента ограничена соотношением, учитывающим конструктивные параметры гантели. 7 з.п.ф-лы, 7 ил.
C = 2B · a · K [(0,37P - (b + l + s)],
где B, P, K - постоянные, численно равные соответственно среднему весу человека (кг), среднему росту человека (см) и коэффициенту пропорциональности веса груза весу человека;
a - постоянная, соответствующая перегрузкам полого грузового элемента, причем для равновесного положения полого грузового элемента a = 2 - 4, а для крайних a = 7 - 10;
b - разность между общей длиной гантели и расстоянием между узкими торцами пружин, см;
l - расстояние между опорными поверхностями полого грузового элемента, см;
s - суммарная длина пружин в сжатом состоянии, см,
при соблюдении условия
10 < [0,37P - (b + l + s)] < 50.
| Устройство для тренировки | 1982 |
|
SU1273127A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
