Изобретение относи1ся к физической культуре и спорту и может найти применение при тренировке тяжелоатлетов и других спортсменов, связанных с развитием силы и точной динамической координации.
Цель изобретения - повышение эффективности тренировки путем обеспечения динамических и импульсно-вибрационных режимов.
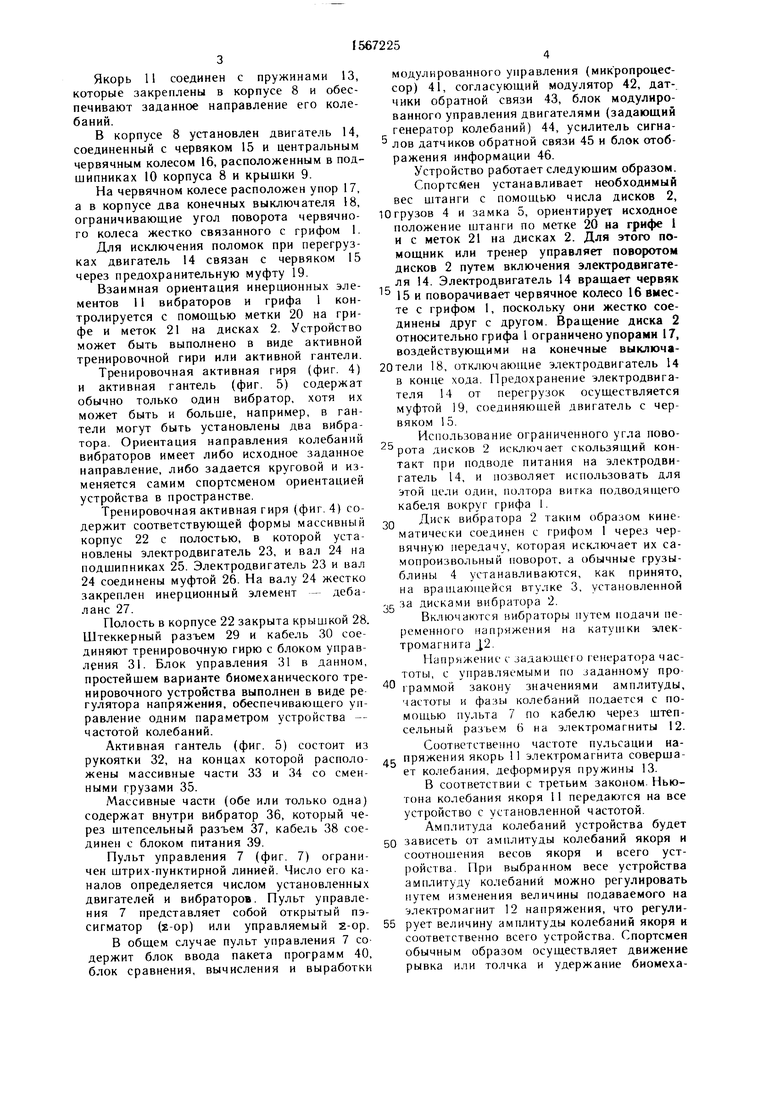
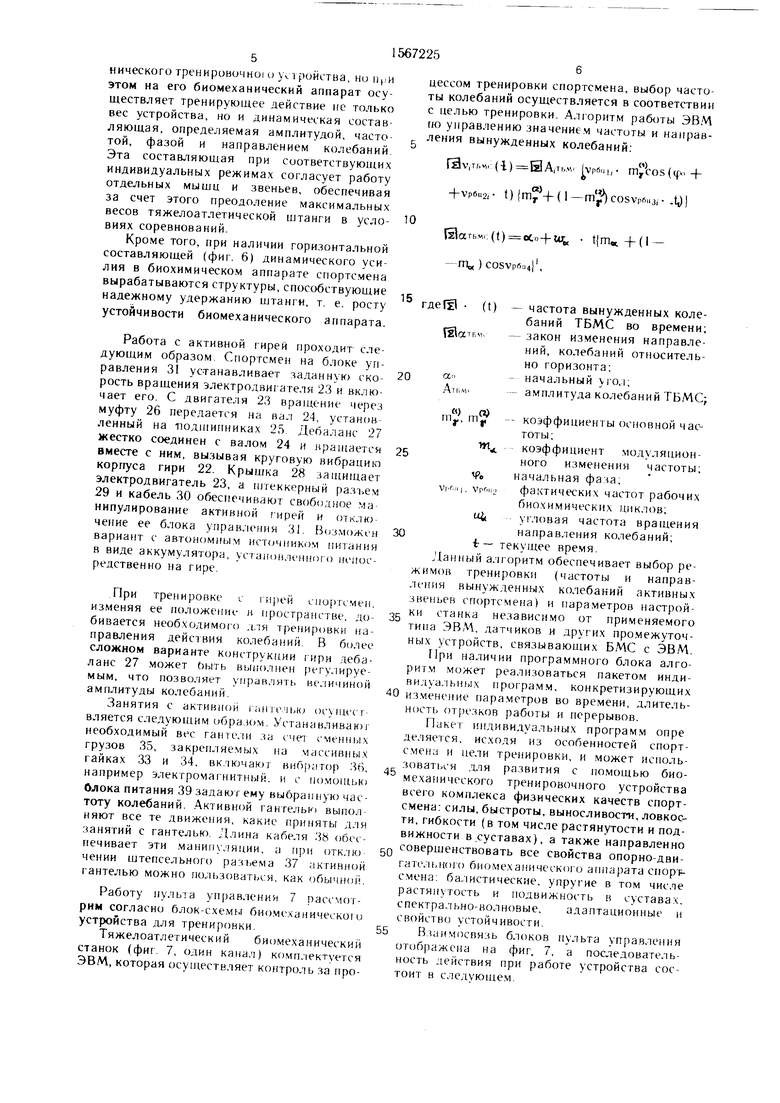
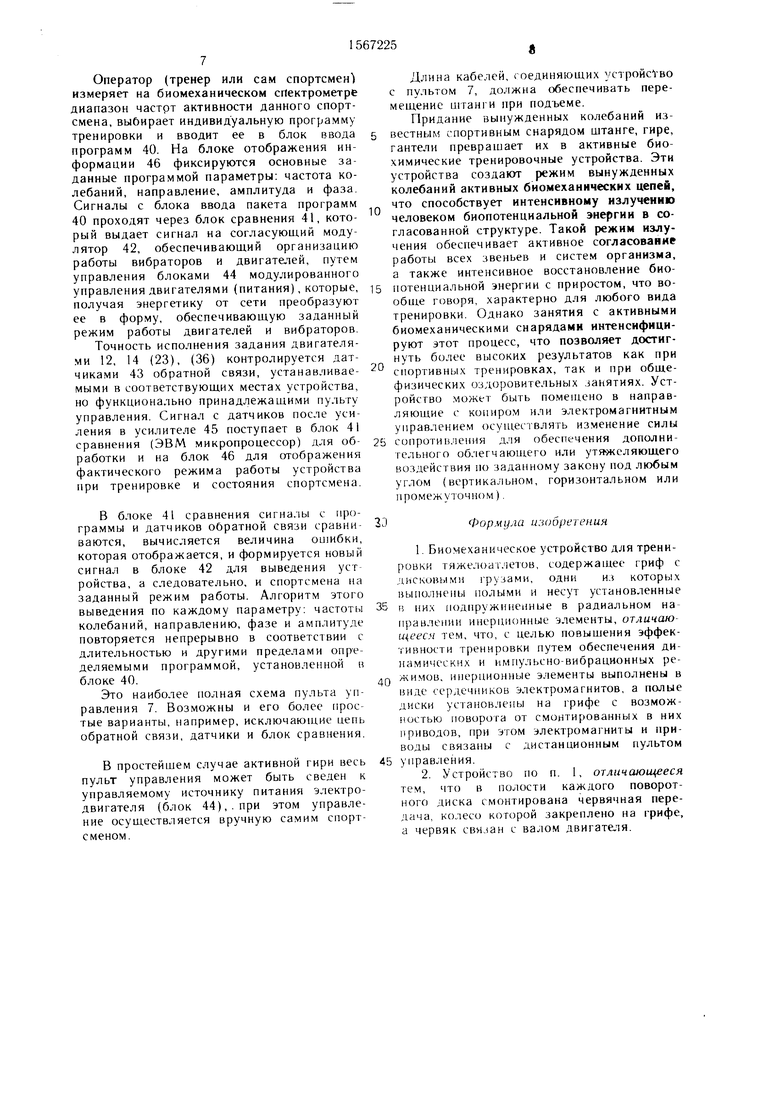
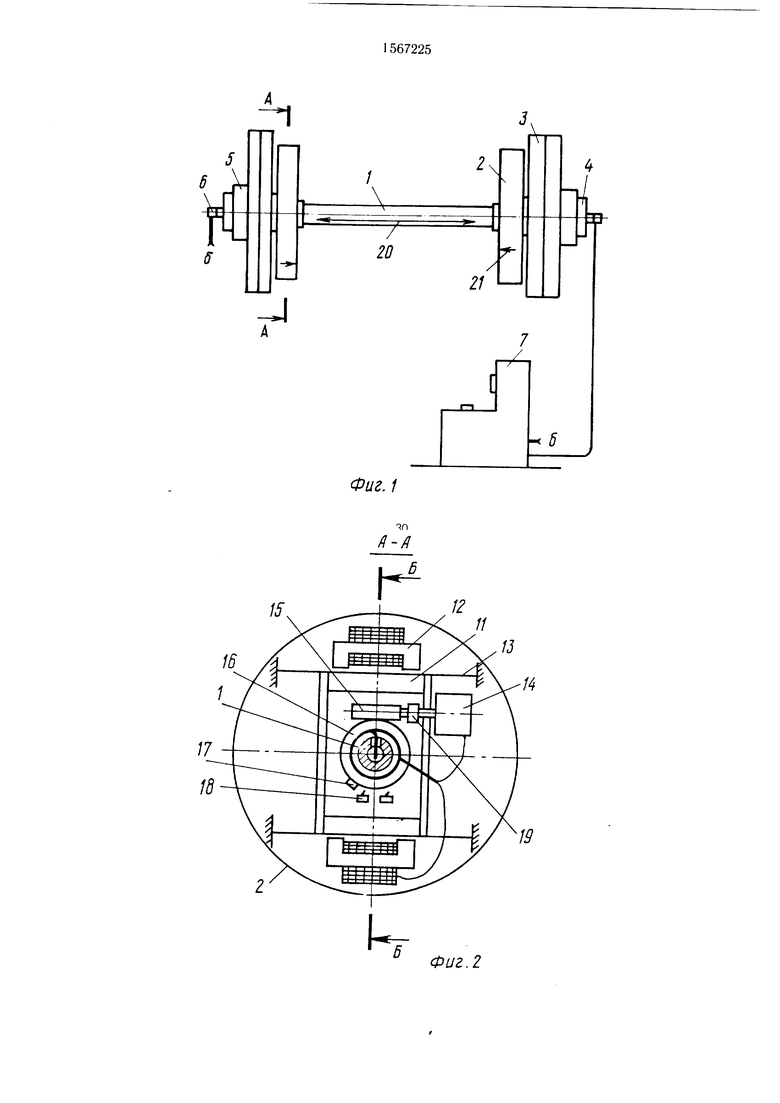
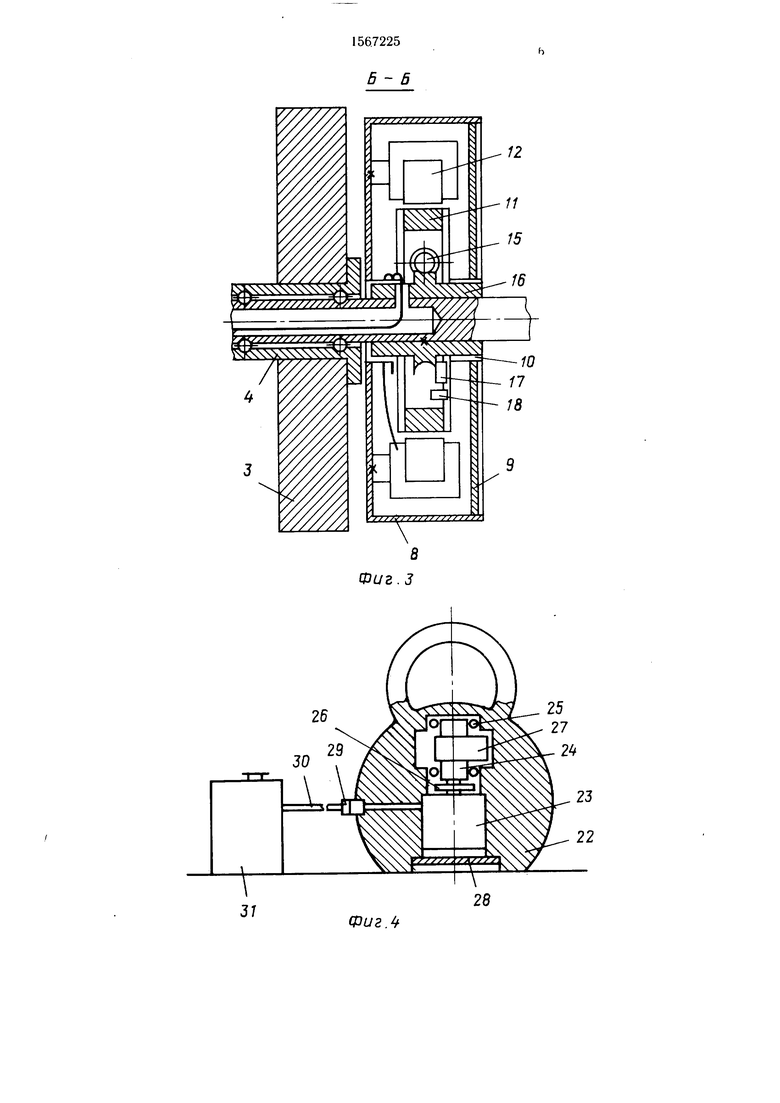
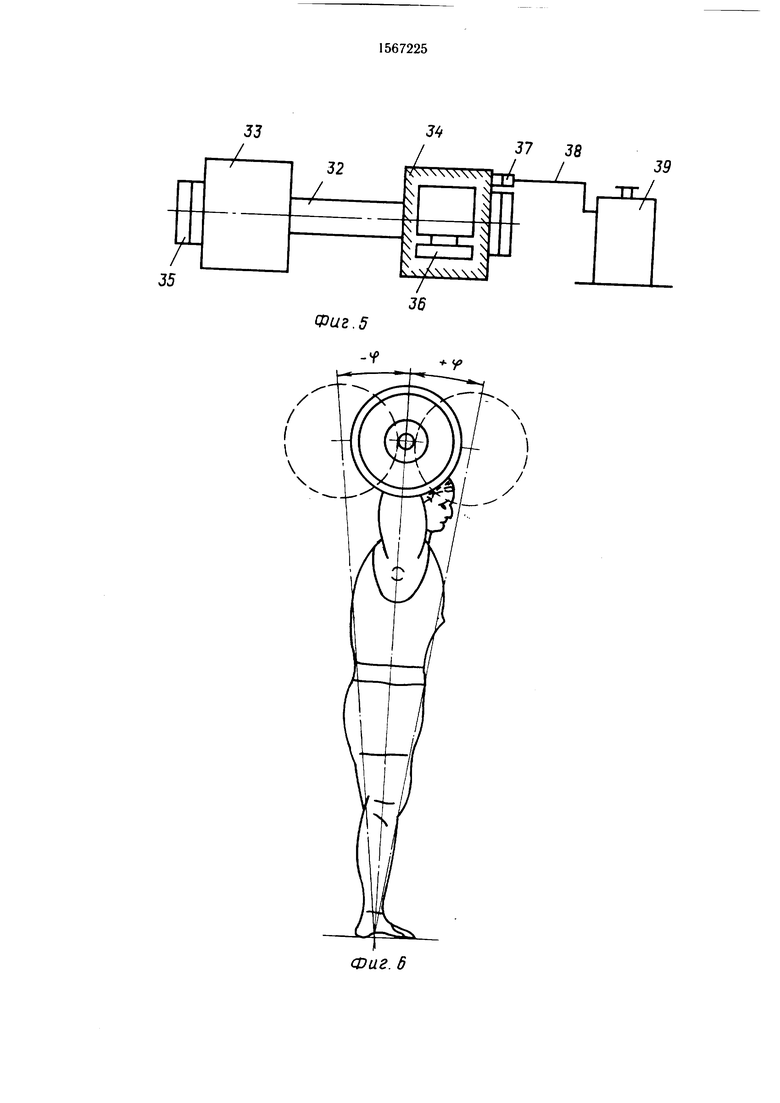
На фиг. I изображена тяжелоатлетическая штанга с вибраторами, общий вид; на фиг. 2 - разрез А -А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - гиря с вибратором, общий вид; на фиг. 5 - гантель с вибратором, общий вид; на фиг. 6 - ехема, поясняющая возникновение тренировочного эффекта при управлении направлением колебаний; на фиг. 7 - блок-схема управления устройства.
Биомеханическое устройство для тренировки тяжелоатлетов содержит гриф 1 с установленными на его концах дисковыми полыми 2, а также вращающихся, как на обычной штанге, втулок 3 м сменных грузов 4, расположенных на втулках 3 и фиксируемых замками 5 На самых концах грифа 1 располагаются штек- керные разъемы 6, соединяющие устройство для тренировки кабельной связью с пультом управления 7, устанавливаемом на расстоянии от самого устройства
Число полых дисков и сменных грузов 4 выбирается в соответствии с уровнем подготовленности и собственного веса чеюве- ка (спортсмена) и в зависимости от цели тренировки.
Диски 2 (фиг. 2 и 3) содержат корпус 8 с закрепляемой на нем крышкой 9. Центральные отверстия корпуса 8 и крышки 9 выполнены в виде подшипников 10.
Внутри корпуса 8 установлен вибратор, состоящий из инерционного элемента - яьо- ря 11 электромагнита 12, жестко соединенного с корпусом 8.
сл
ОЭ 1 is ND СЛ
Якорь 11 соединен с пружинами 13, которые закреплены в корпусе 8 и обеспечивают заданное направление его колебаний.
В корпусе 8 установлен двигатель 14, соединенный с червяком 15 и центральным червячным колесом 16, расположенным в подшипниках 10 корпуса 8 и крышки 9.
На червячном колесе расположен упор 17, а в корпусе два конечных выключателя 18, ограничивающие угол поворота червячного колеса жестко связанного с грифом 1.
Для исключения поломок при перегрузках двигатель 14 связан с червяком 15 через предохранительную муфту 19.
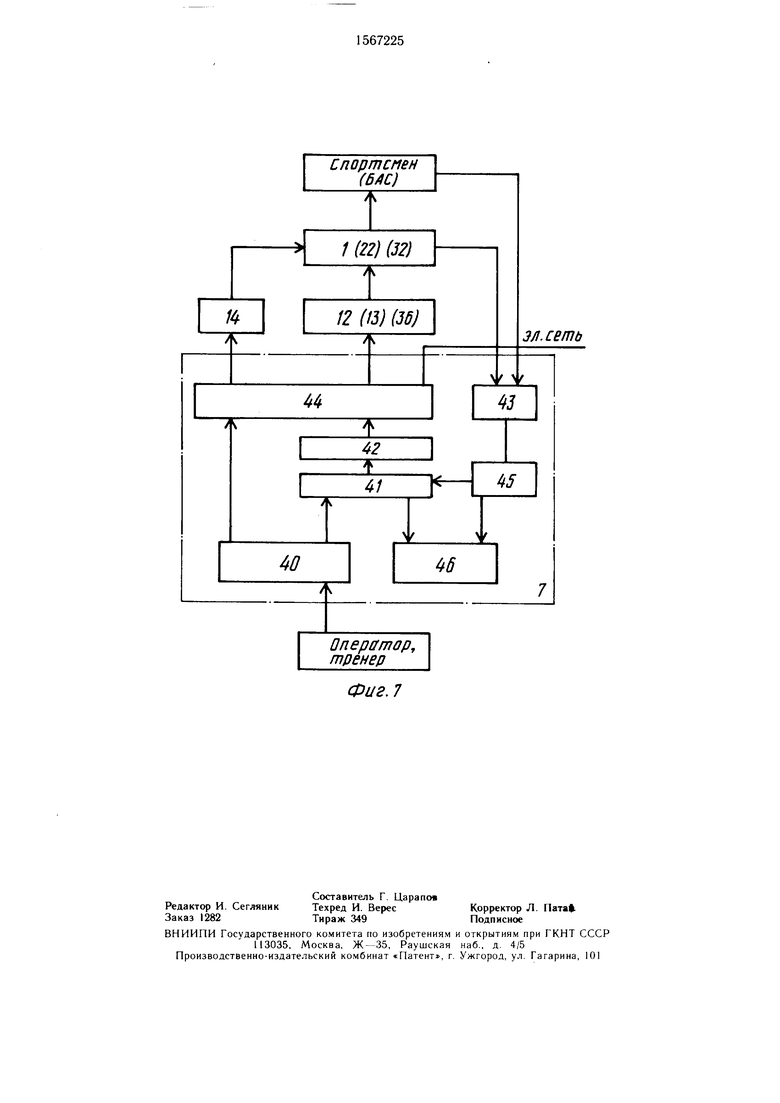
Взаимная ориентация инерционных элемодулнрованного управления (микропроцессор) 41, согласующий модулятор 42, датчики обратной связи 43, блок модулированного управления двигателями (задающий генератор колебаний) 44, усилитель сигна лов датчиков обратной связи 45 и блок отображения информации 46.
Устройство работает следующим образом.
Спортсмен устанавливает необходимый
вес штанги с помощью числа дисков 2,
10 грузов 4 и замка 5, ориентирует исходное положение штанги по метке 20 на грифе 1 и с меток 21 на дисках 2. Для этого помощник или тренер управляет поворотом дисков 2 путем включения электродвигателя 14. Электродвигатель 14 вращает червяк
LJoan rnnan uyncniaunn ппсрцпиппил эле- -, с-г -)i-i
ментов 11 вибраторов и грифа 1 кон- |Э 15 и поворачивает червячное колесо 16 вместролируется с помощью метки 20 на гри фе и меток 21 на дисках 2. Устройство может быть выполнено в виде активной тренировочной гири или активной гантели. Тренировочная активная гиря (фиг. 4) и активная гантель (фиг. 5) содержат обычно только один вибратор, хотя их может быть и больше, например, в гантели могут быть установлены два вибратора. Ориентация направления колебаний
те с грифом 1, поскольку они жестко соединены друг с другом. Вращение диска 2 относительно грифа 1 ограничено упорами 17, воздействующими на конечные выключа20тели 18, отключающие электродвигатель 14 в конце хода. Предохранение электродвигателя 14 от перегрузок осуществляется муфтой 19, соединяющей двигатель с червяком 15.
Использование ограниченного угла пововибраторов имеет либо исходное заданное 25рота дисков 2 исключает скользящий коннаправление, либо задается круговой и изменяется самим спортсменом ориентацией устройства в пространстве.
Тренировочная активная гиря (фиг. 4) содержит соответствующей формы массивный корпус 22 с полостью, в которой установлены электродвигатель 23, и вал 24 на подшипниках 25. Электродвигатель 23 и вал 24 соединены муфтой 26. На валу 24 жестко закреплен инерционный элемент - деба- ланс 27.
Полость в корпусе 22 закрыта крышкой 28. Штеккерный разъем 29 и кабель 30 соединяют тренировочную гирю с блоком управления 31. Блок управления 31 в данном, простейшем варианте биомеханического тренировочного устройства выполнен в виде ре гулятора напряжения, обеспечивающего управление одним параметром устройства - частотой колебаний.
Активная гантель (фиг. 5) состоит из
такт при подводе питания на электродвигатель 14, и позволяет использовать для этой цели один, полтора вигка подводящего кабеля вокруг грифа 1.
2Q Диск вибратора 2 таким образом кинематически соединен с грифом 1 через червячную передачу, которая исключает их самопроизвольный поворот, а обычные грузы- блины 4 устанавливаются, как принято, на вращающейся втулке 3, установленной
35 за дисками вибратора 2.
Включаются вибраторы путем подачи переменного напряжения на катушки электромагнита J2
Напряжение с задаюшлчо генератора частоты, с управляемыми по заданному про40 граммой закону значениями амплитуды, частоты и фазы колебаний подается с помощью пульта 7 по кабелю через штепсельный разьем 6 на электромагниты 12. Соответственно частоте пульсации нарукоятки 32, на концах которой располо- 45 пряжения якорь 11 электромагнита совершажены массивные части 33 и 34 со смен ными грузами 35.
Массивные части (обе или только одна) содержат внутри вибратор 36, который через штепсельный разъем 37, кабель 38 соединен с блоком питания 39.
Пульт управления 7 (фиг. 7) ограничен штрих-пунктирной линией. Число его каналов определяется числом установленных двигателей и вибраторов. Пульт управления 7 представляет собой открытый пэ- сигматор (s-op) или управляемый 2-ор. В общем случае пульт управления 7 содержит блок ввода пакета программ 40, блок сравнения, вычисления и выработки
ет колебания, деформируя пружины 13.
В соответствии с третьим законом. Ньютона колебания якоря 11 передаются на все устройство с установленной частотой.
Амплитуда колебаний устройства будет
50 зависеть от амплитуды колебаний якоря и соотношения весов якоря и всего устройства. При выбранном весе устройства амплитуду колебаний можно регулировать путем изменения величины подаваемого на электромагнит 12 напряжения, что регули55 рует величину амплитуды колебаний якоря и соответственно всего устройства. Спортсмен обычным образом осуществляет движение рывка или толчка и удержание биомехамодулнрованного управления (микропроцессор) 41, согласующий модулятор 42, датчики обратной связи 43, блок модулированного управления двигателями (задающий генератор колебаний) 44, усилитель сигна лов датчиков обратной связи 45 и блок отображения информации 46.
Устройство работает следующим образом.
Спортсмен устанавливает необходимый
вес штанги с помощью числа дисков 2,
10 грузов 4 и замка 5, ориентирует исходное положение штанги по метке 20 на грифе 1 и с меток 21 на дисках 2. Для этого помощник или тренер управляет поворотом дисков 2 путем включения электродвигателя 14. Электродвигатель 14 вращает червяк
-, с-г -)i-i
|Э 15 и поворачивает червячное колесо 16 вмес|Э 15 и поворачивает червячное колесо 16 вместе с грифом 1, поскольку они жестко соединены друг с другом. Вращение диска 2 относительно грифа 1 ограничено упорами 17, воздействующими на конечные выключа20тели 18, отключающие электродвигатель 14 в конце хода. Предохранение электродвигателя 14 от перегрузок осуществляется муфтой 19, соединяющей двигатель с червяком 15.
Использование ограниченного угла пово25рота дисков 2 исключает скользящий контакт при подводе питания на электродвигатель 14, и позволяет использовать для этой цели один, полтора вигка подводящего кабеля вокруг грифа 1.
2Q Диск вибратора 2 таким образом кинематически соединен с грифом 1 через червячную передачу, которая исключает их самопроизвольный поворот, а обычные грузы- блины 4 устанавливаются, как принято, на вращающейся втулке 3, установленной
35 за дисками вибратора 2.
Включаются вибраторы путем подачи переменного напряжения на катушки электромагнита J2
Напряжение с задаюшлчо генератора частоты, с управляемыми по заданному про40 граммой закону значениями амплитуды, частоты и фазы колебаний подается с помощью пульта 7 по кабелю через штепсельный разьем 6 на электромагниты 12. Соответственно частоте пульсации на45 пряжения якорь 11 электромагнита совершапряжения якорь 11 электромагнита совершает колебания, деформируя пружины 13.
В соответствии с третьим законом. Ньютона колебания якоря 11 передаются на все устройство с установленной частотой.
Амплитуда колебаний устройства будет
зависеть от амплитуды колебаний якоря и соотношения весов якоря и всего устройства. При выбранном весе устройства амплитуду колебаний можно регулировать путем изменения величины подаваемого на электромагнит 12 напряжения, что регулирует величину амплитуды колебаний якоря и соответственно всего устройства. Спортсмен обычным образом осуществляет движение рывка или толчка и удержание биомеханического тренировочно: и i роиства, но пни этом на его биомеханический аппарат осуществляет тренирующее действие не только вес устройства, но и динамическая составляющая, определяемая амплитудой, частотой, фазой и направлением колебаний. Эта составляющая при соответствующих индивидуальных режимах согласует работу отдельных мышц и звеньев, обеспечивая за счет этого преодоление максимальных весов тяжелоатлетической штанги в условиях соревнований.
Кроме того, при наличии горизонтальной составляющей (фиг. 6) динамического усилия в биохимическом аппарате спортсмена вырабатываются структуры, способствующие надежному удержанию штанги, т. е. росту устойчивости биомеханического аппарата.
Работа с активной гирей проходит следующим образом Спортсмен на блоке управления 31 устанавливает заданную скорость вращения электродвигателя 23 и включает его. С двигателя 23 вращение через муфту 26 передается на вал 24, установленный на подшипниках 25 Дебаланс 27 жестко соединен с валом 24 и вращается вместе с ним, вызывая круговую вибрацию корпуса гири 22. Крышка 28 защищает электродвигатель 23, а штеккерный разъем 29 и кабель 30 обеспечивают свободное манипулирование активной гирей и отключение ее блока управления 31. Возможен вариант с автономным источником питания в виде аккумулятора, установленного непосредственно на гире.
iирей спортсмен, в пространстве, до- для тренировки наПри тренировке с изменяя ее положение бивается необходимого правления действия колебаний В более сложном варианте конструкции гири деба- ланс 27 может быть выполнен регулируемым, что позволяет управлять величиной амплитуды колебаний.
Занятия с активной пппечью вляется следующим обраюм. Устанавливаю необходимый вес гантели за счет сменных грузов 35, закрепляемых на массивных гайках 33 и 34, включаю вибратор 36, например электромагнитный, и с помощью блока питания 39 задают ему выбранную частоту колебаний. Активной гантелью выполняют все те движения, какие приняты для занятий с гантелью. Длина кабеля Зй обеспечивает эти манипуляции, а при отклю чении штепсельного разъема 37 активной гантелью можно пользоваться, как обычно}.
Работу пульта управления 7 рассмотрим согласно блок-схемы биомеханическою устройства для тренировки.
Тяжелоатлетический биомеханический станок (фиг. 7, один канал) комплектуется ЭВМ, которая осуществляет контроль за процессом тренировки спортсмена, выбор частоты колебаний осуществляется в соответствии с целью тренировки. Алгоритм работы ЭВМ по управлению значением частоты и направления вынужденных колебаний:
(i)l
,ТЬЧ
Vpflui
),
mfcos((f« -f+vp6u2, t) 1- m cosvpftuj, .tj)
10
JslaTb, (t) cco+wt tjnv-Hl -
- ГЦ, ) COSVpflu4)
где Mil IzlocTBM
(t)
an
AlhV
-частота вынужденных колебаний ТБМС во времени;
-закон изменения направлений, колебаний относительно горизонта;
-начальный угол;
-амплитуда колебаний ТБМС;
5
0
5
0
5
0
V ma
mJ, m
коэффициенты основной частоты ;
V коэффициент модуляционного изменения частоты; f« начальная фаза, . vr iiij фактических частот рабочих
биохимических циклов; & угловая частота вращения
направления колебаний; t - текущее время.
Данный алгоритм обеспечивает выбор режимов тренировки (частоты и направления вынужденных колебаний активных звеньев спортсмена) и параметров настройки станка независимо от применяемого типа ЭВМ, датчиков и других промежуточных устройств, связывающих ВМС с ЭВМ. При наличии программного блока алгоритм может реализоваться пакетом индивидуальных программ, конкретизирующих изменение параметров во времени, длительность отрезков работы и перерывов.
Паке индивидуальных программ опре деляется, исходя из особенностей спортсмена и цели тренировки, и может использоваться для развития с помощью биомеханического тренировочного устройства всего комплекса физических качеств спортсмена: силы, быстроты, выносливости, ловкости, гибкости (в том числе растянутости и подвижности в.суставах), а также направленно совершенствовать все свойства опорно-двигательного биомеханического аппарата спортсмена, ба.тистические, упругие в том числе растян тость и подвижность в суставах, спектрально-волновые, адаптационные и свойство устойчивости.
Взаимосвязь блоков пульта управления отображена на фиг. 7, а последовательность действия при работе устройства состоит в следующем.
Оператор (тренер или сам спортсмен) измеряет на биомеханическом спектрометре диапазон частот активности данного спортсмена, выбирает индивидуальную программу тренировки и вводит ее в блок ввода программ 40. На блоке отображения информации 46 фиксируются основные заданные программой параметры: частота колебаний, направление, амплитуда и фаза. Сигналы с блока ввода пакета программ 40 проходят через блок сравнения 41, который выдает сигнал на согласующий модулятор 42, обеспечивающий организацию работы вибраторов и двигателей, путем управления блоками 44 модулированного управления двигателями (питания), которые, получая энергетику от сети преобразуют ее в форму, обеспечивающую заданный режим работы двигателей и вибраторов.
Точность исполнения задания двигателями 12, 14 (23), (36) контролируется датчиками 43 обратной связи, устанавливаемыми в соответствующих местах устройства, но функционально принадлежащими пульгу управления. Сигнал с датчиков после усиления в усилителе 45 поступает в блок 41 сравнения (ЭВМ микропроцессор) для обработки и на блок 46 для отображения фактического режима работы устройства при тренировке и состояния спортсмена.
В блоке 41 сравнения сигналы с программы и датчиков обратной связи сравниваются, вычисляется величина ошибки, которая отображается, и формируется новый сигнал в блоке 42 для выведения уст ройства, а следовательно, и спортсмена на заданный режим работы. Алгоритм этого выведения по каждому параметру: частоты колебаний, направлению, фазе и амплитуде повторяется непрерывно в соответствии с длительностью и другими пределами опре деляемыми программой, установленной в блоке 40.
Это наиболее полная схема пульта управления 7. Возможны и его более простые варианты, например, исключающие цепь обратной связи, датчики и блок сравнения.
В простейшем случае активной гири весь пульт управления может быть сведен к управляемому источнику питания электродвигателя (блок 44),. при этом управление осуществляется вручную самим спортсменом.
0
Ь
3
5
0
5
Длина кабелей, . оединяющих устройство с пультом 7, должна обеспечивать перемещение шганги при подъеме.
Придание вынужденных колебаний известным спортивным снарядом штанге, гире, гантели превращает их в активные биохимические тренировочные устройства. Эти устройства создают режим вынужденных колебаний активных биомеханических цепей, что способствует интенсивному излучению человеком биопотенциальной энергии в согласованной структуре. Такой режим излучения обеспечивает активное согласование работы всех звеньев и систем организма, а также интенсивное восстановление биопотенциальной энергии с приростом, что вообще говоря, характерно для любого вида тренировки. Однако занятия с активными биомеханическими снарядами интенсифицируют этот процесс, что позволяет достигнуть более высоких результатов как при спортивных тренировках, так и при общефизических оздоровительных занятиях. Устройство может быть помещено в направляющие с копиром или электромагнитным управлением осуществлять изменение силы сопротивления для обеспечения дополнительного облегчающего или утяжеляющего воздействия по заданному закону под любым углом (вертикальном, горизонтальном или промежуточном)
Формула изобреи ния
1 Биомеханическое устройство для тренировки тяжелоатлетов, содержащее гриф с дисковыми грузами, одни ил которых выполнены полыми и несут установленные ч них подпружиненные в радиальном направлении инерционные элементы, отличаю щееся тем, что, с целью повышения эффективности тренировки путем обеспечения динамических и импульсно-вибрационных ре- лимов, инерционные элементы выполнены в виде сердечников электромагнитов, а полые диски установлены на грифе с возможностью поворота от смонтированных в них приводов, при этом электромагниты и приводы связаны с дистанционным пультом управления.
2. Устройство по п. 1, отличающееся тем, что в полости каждого поворотного диска смонтирована червячная передача, колесо которой закреплено на грифе, а червяк связан с валом двигателя.
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренировочный мяч Ф.К.Агашина | 1986 |
|
SU1347952A1 |
| Устройство для тренировки спортсменов | 1987 |
|
SU1551388A1 |
| Устройство для тренировки | 1980 |
|
SU961710A1 |
| Устройство для тренировки | 1975 |
|
SU736989A1 |
| М. Кл. А,63Ь 69/00 | 1972 |
|
SU429823A1 |
| Устройство для тренировки спортсменов | 1983 |
|
SU1248621A1 |
| Диск тяжелоатлетической штанги Агашиных | 1984 |
|
SU1194431A1 |
| Устройство для тренировки спортсменов Ф.К.Агашина | 1985 |
|
SU1347953A2 |
| Устройство для тренировки спортсменов | 1980 |
|
SU963532A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ШТАНГИ И БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ТЯЖЕЛОАТЛЕТА | 2008 |
|
RU2403937C2 |
Изобретение позволяет повысить эффективность тренировки путем развития упругих и спектральных свойств устойчивости биомеханического аппарата спортсмена. Устройство содержит гриф 1 с установленными на его концах дисковыми полыми грузами 2 и обычными сменными грузами. Внутри каждого полого диска установлен инерционный элемент - якорь 11 электромагнита 12. Якорь подвешен на пружинах 13. На валу установленного в полости диска двигателя 14 закреплен червяк 15. Червяк 15 установлен с возможностью взаимодействия с колесом 16. Колесо закреплено на грифе 1. Двигатель 14 и электромагнит 12 связаны кабелем с пультом управления. Пульт управления включает ЭВМ, с помощью которой регулируются параметры колебаний якоря 11 и поворота диска по заданному алгоритму. На биомеханический аппарат спортсмена воздействуют не только все штанги, но и динамическая составляющая, определяемая амплитудой, частотой, фазой и направлением колебаний инерционного элемента 11. 1 з.п. ф-лы, 7 ил.
16
Фиг. 1
Фиг. 2
См
s
с:
го
Сл
I
fci
ел
O5
to
Ю
СП
to
do
JJ
/
J4
37 38
39
I
Фаг. 6
Спортсмен
(6АС)
1 (22) (32)
/4
12 (13) (3d)
л
М
40
Оператор, тренер
/
эл.сеть
42
U
Фиг. 7
| Диск тяжелоатлетической штанги Агашиных | 1984 |
|
SU1194431A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
