Изобретение относится к подводным аппаратам, а именно к подводным лодкам.
Известны подводные лодки с движителями в виде гребных винтов.
Известна подводная лодка с бортовыми гребными движителями, принятая в качестве прототипа.
Целью изобретения является повышение эффективности, безопасности и маневренности подводного плаванья.
Цель достигается тем, что подводная лодка, содержащая корпус, бортовые гребные движители, связанные передаточными устройствами с силовым приводом, органы управления движителями, отличающаяся тем, что каждый движитель выполнен в виде плоской гибкой лопасти, закрепленной на выходной оси передаточного устройства с возможностью размаха на угол до ±90о и поворота вокруг своей продольной оси в крайних маховых положениях, передаточное устройство размещено в корпусе в виде цилиндрического стакана, установленного горизонтально в корпусе лодки с возможностью поворота вокруг своей продольной оси, при этом входная ось передаточного устройства пропущена на подшипнике через донышко стакана и связана конической зубчатой передачей с силовым приводом. На внутреннем конце входной оси передаточного устройства закреплен кривошип, соединенный шатуном со средним звеном прямоугольной полурамки, установленной в корпусе устройства с возможностью поворота вокруг оси, проходящей через боковые горизонтальные звенья полурамки, на свободном конце одного из которых закреплен шестеренчатый сектор, сцепленный с цилиндрической шестерней, насаженной на выходную ось передаточного устройства, при этом для ограничения угла поворота полурамки к стенке корпуса прикреплены плоские пружины, а для регулирования угла поворота полурамки кривошип выполнен подпружиненным, его конец соединен гибкой связью с втулкой, установленной с возможностью продольного перемещения и фиксации на наружном конце входной оси передаточного устройства. К выходной оси передаточного устройства с обеих сторон основания лопасти прикреплена вторая прямоугольная полурамка, на одно из боковых горизонтальных звеньев которой насажена с возможностью поворота трубка с двумя противоположно направленными спицами, свободный конец одной из спиц заведен в паз основания лопасти, а конец другой спицы в крайних маховых положениях лопасти взаимодействует с упорами, установленными с возможностью изменения расстояния между ними на поворотных рычагах. Передаточное устройство снабжено жестко связанной с его корпусом конической шестеренчатой парой, соединенной с приводом изменения плоскости размаха гребных лопастей.
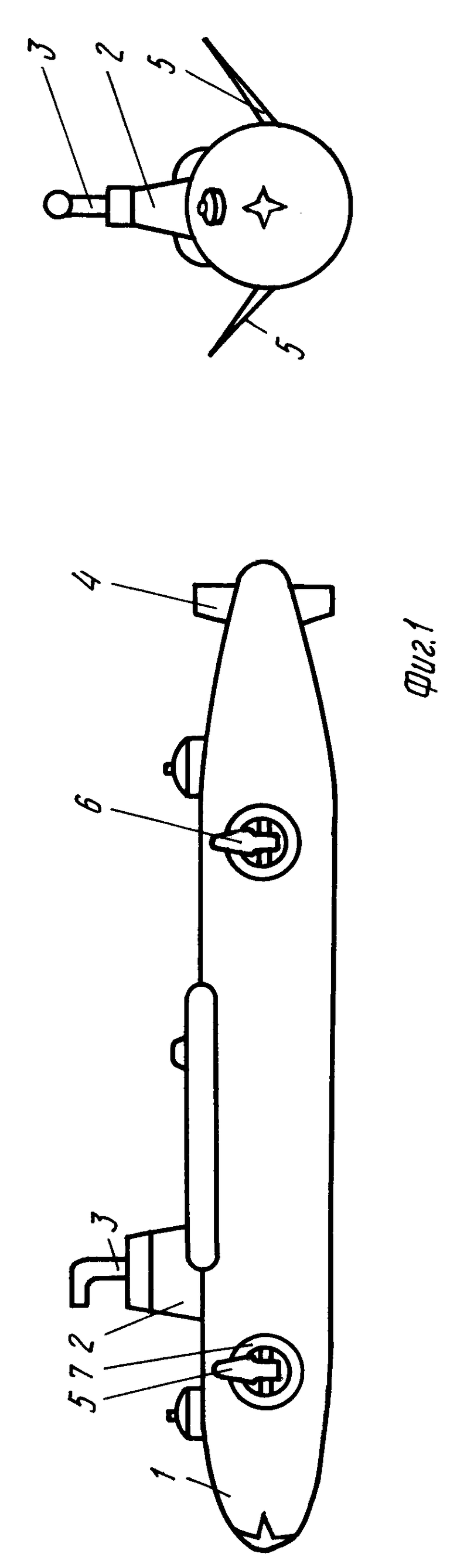
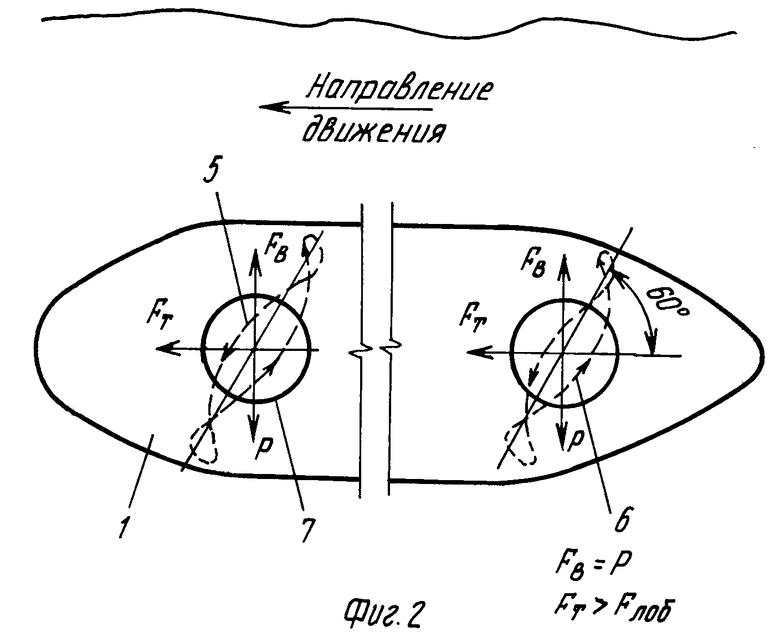
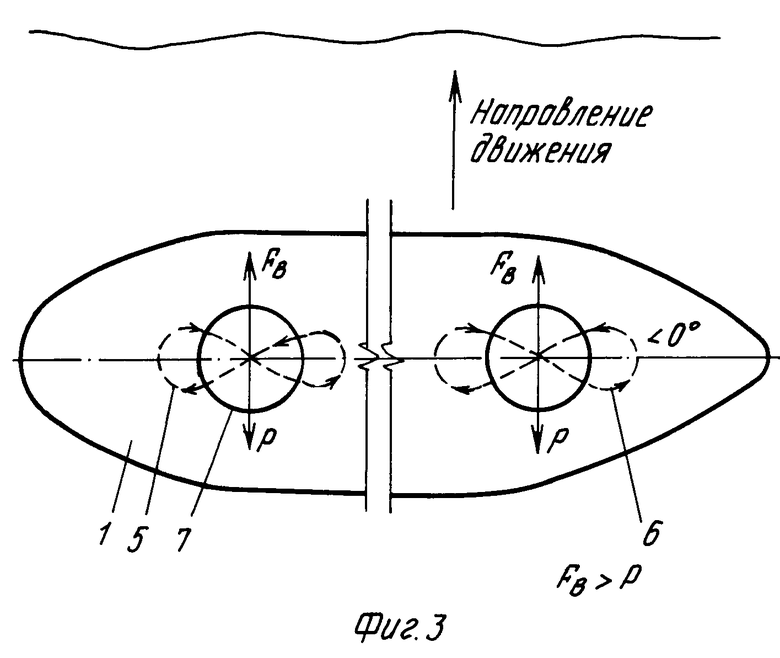
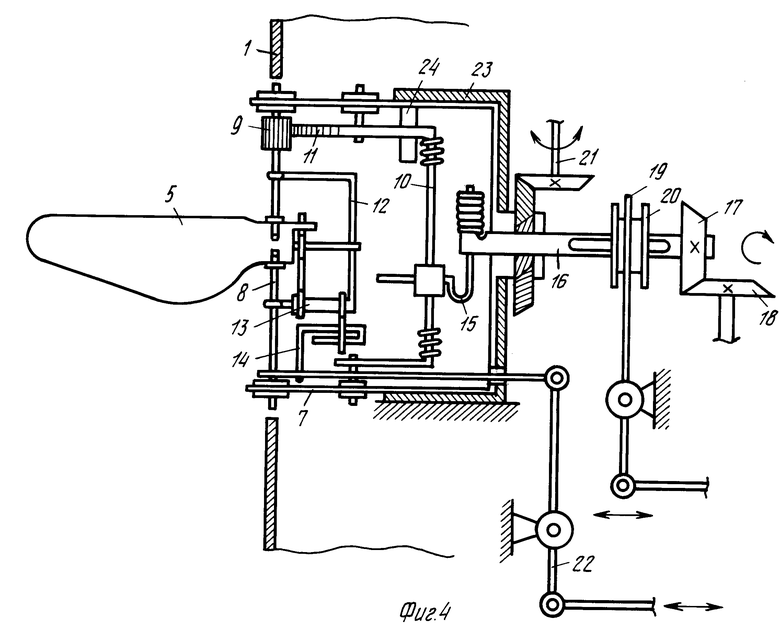
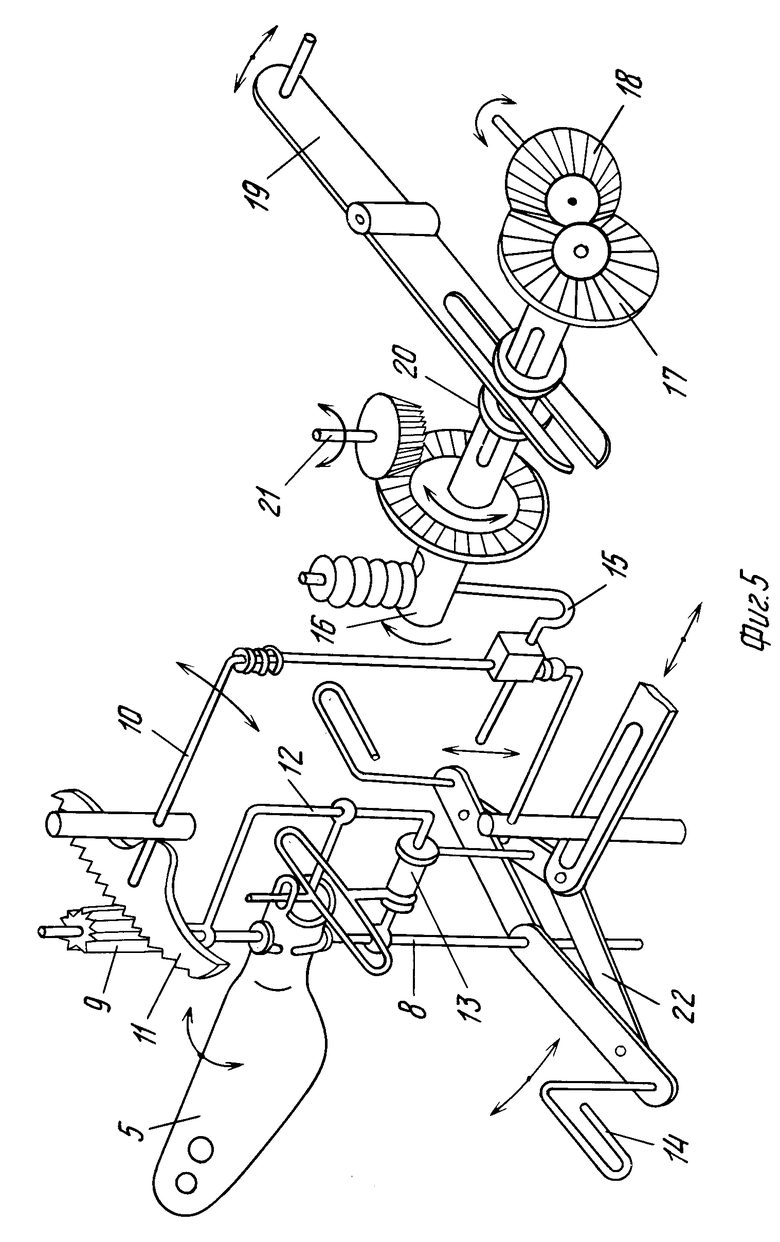
На фиг. 1 представлена схема подводной лодки; на фиг. 2, 3 - схемы положения плоскости гребков в зависимости от направления движения подлодки; на фиг. 4 - гребной механизм лопасти, разрез; на фиг. 5 - кинематическая схема гребного механизма.
Подводная лодка (фиг. 1) содержит корпус 1, рубку 2, перископ 3, стабилизатор 4, переднюю пару гребных лопастей 5, заднюю пару гребных лопастей 6 с гребными механизмами 7. Двигатель, баки с топливом, системы управления, навигации и жизнеобеспечения экипажа не показаны. Передаточное устройство содержит (фиг. 4 и 5) цилиндрический стакан с одним основанием, ось 8, цилиндрическую шестерню 9, большую полурамку 10, шестеренчатый сектор 11, малую полурамку 12, трубку со спицами 13, подвижные упоры 14, кривошип 15, полую ось 16, коническую шестерню 17, конический тройник 18, рычаг 19 амплитуды гребков, втулку 20, коническую пару 21 электропривода изменения углов атаки, цилиндрический стакан 23, плоскую пружину 24.
У подводной лодки с машущими гребными лопастями в режиме плаванья "всплытие" плоскость гребков лопастей должна быть горизонтальной, чтобы сила тяги лопастей была направлена вверх, а в режиме плаванья "горизонтальный ход" плоскость взмахов лопастей должна составлять угол порядка 60о относительно продольной оси лодки, чтобы сила тяги была направлена вперед. В первом случае концы лопастей описывают восьмеркообразные траектории (фиг. 3), а во втором - более сложную пространственную траекторию (фиг. 2).
Рассмотрим подробнее работу передаточного механизма.
Вращающее усилие двигателя через конический тройник 18 с шестерни 17 через ось 16 и кривошип 15 переменной длины передается на подвижную полурамку 10, которая начинает колебательные движения относительно своей оси. Эти движения через шестеренчатый сектор 11 передаются цилиндрической шестерне 9, оси 8, полурамке 12 и лопасти 5, последняя начинает грести, создавая тягу, причем на один оборот шестерни 17 приходится два гребка - влево и вправо. В крайних положениях полурамки 12 нижняя спица 13 трубки взаимодействует с упорами 14, при этом верхняя фигурная спица, находящаяся в пазу основания лопасти, вращает лопасть 5 вокруг продольной оси, меняя периодически знак угла атаки лопасти на противоположный.
Упоры 14 могут сближаться или удаляться друг от друга с помощью рычага 22 угла атаки, увеличивая или уменьшая его, регулируя величину водной тяги.
Регулировка амплитуды гребков лопастей производится гидроприводом путем перемещения рычагом 19 втулки 20 вдоль полой оси 16. Втулка 20 гибко связана с подпружиненным концом кривошипа 15, который изменяет свою длину, в результате чего изменяется амплитуда колебаний полурамки 10, следовательно, и амплитуда гребка и сила водной тяги.
Изменение плоскости гребков осуществляется электроприводом через коническую пару 21, большая шестерня которой жестко связана с корпусом передаточного механизма. Гребные лопасти 5 и 6 левого и правого бортов независимы по управлению для увеличения маневренности субмарины.
Подводной лодке с движителем с машущими гребными лопастями традиционные руль и винт в принципе уже не нужны.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИРИЖАБЛЬ | 1989 |
|
RU2009072C1 |
| Водный велосипед (вопед) | 2021 |
|
RU2772919C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| Двойное весло Чичаева | 2019 |
|
RU2724220C1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| ГРЕБНО-ПАРУСНАЯ ЛОДКА ПОЛЯ | 2019 |
|
RU2714378C1 |
| ТРАНСПОРТ | 2008 |
|
RU2378152C2 |
| ГРЕБНОЕ КОЛЕСО | 1999 |
|
RU2176969C2 |
| ГУСЕНИЧНАЯ ЛОПАСТНАЯ ХОДОВАЯ ЧАСТЬ НАДВОДНЫХ И ПОДВОДНЫХ КОРАБЛЕЙ | 1996 |
|
RU2141430C1 |
| Гребное устройство | 1938 |
|
SU54933A1 |
Использование: судостроение, подводные лодки. Сущность изобретения: подводная лодка снабжена бортовыми гребными движителями, выполненными в виде гибких плоских лопастей, закрепленных на оси передаточного устройства с возможностью размаха на угол ± 90° и поворота вокруг своей продольной оси в крайних маховых положениях. Передаточное устройство связано зубчатой передачей с силовым приводом. 3 з.п. ф-лы, 5 ил.
| Трусов Г.М | |||
| Подводные лодки в русском и советском флоте | |||
| М.: Судпромгиз, 1963, с.39-44, подводная лодка Шильдера. |
