Изобретение относится к летательным аппаратам легче воздуха, а именно к дирижаблям.
Известен дирижабль с крыльями, машущими по принципу крыла птицы.
Известный дирижабль недостаточно эффективен, так как снабжен крыльями, работающими так же, как и крылья птиц.
Целью изобретения является повышение эффективности, безопасности полета и маневренности.
Это достигается тем, что дирижабль снабжен каркасным корпусом, наполненным гелием, кабиной для экипажа, пассажиров и грузов, двигателями, баками с топливом и движителем с машущими гибкими плоскими и упругими крыльями и машущими механизмами, дирижабль снабжен плоскими пружинами, основания крыльев шарнирно закреплены на элементах машущего механизма с возможностью вращения вокруг своих продольных осей в крайних маховых положениях и изменения угла атаки, основания крыльев установлены на элементах машущего механизма с возможностью резонансно-колебательного взаимодействия с плоскими пружинами, причем машущий механизм для каждого из крыльев выполнен в виде цилиндра, на одном основании которого закреплены две плоские пружины, машущий механизм снабжен подшипником, в котором установлено крыло и двумя ограничителями свободного вращения крыла, осью с кривошипом переменной длины, соединенным с одним концом оси, на другом конце оси закреплена шестерня и ось подвижно соединена со вторым основанием цилиндра, подвижной полурамкой с одной удлиненной горизонтальной стороной и другой стороной с вертикальным пазом, в который входит кривошип, фигурным поводком, подвижно соединенным с удлиненной горизонтальной стороной полурамки, горизонтальным рычагом с коротким и длинным концами и двумя упорами, закрепленными на коротком конце горизонтального рычага, на длинном конце рычага выполнен паз, машущий механизм снабжен водилом, жестко закрепленным на подшипнике крыла, ось машущего механизма через конические шестерни, вал и редуктор соединена с валом двигателя, в основании крыла выполнено отверстие, в котором со скользящей посадкой размещен нижний горизонтальный конец фигурного поводка, короткая сторона подвижной полурамки установлена с возможностью взаимодействия с двумя упорами рычага, а конец водила размещен в пазу рычага, при этом цилиндры машущих механизмов соединены с корпусом дирижабля шарнирно с возможностью вращения вокруг вертикальной и горизонтальной осей и соединены с силовыми приводами, а упоры выполнены подвижными с возможностью перемещения вдоль короткого плеча рычага, кроме того машущий механизм снабжен втулкой, подвижно установленной на оси, а втулка соединена гибкой связью с подпружиненным концом кривошипа переменной длины и машущие механизмы крыльев выполнены с возможностью независимого управления.
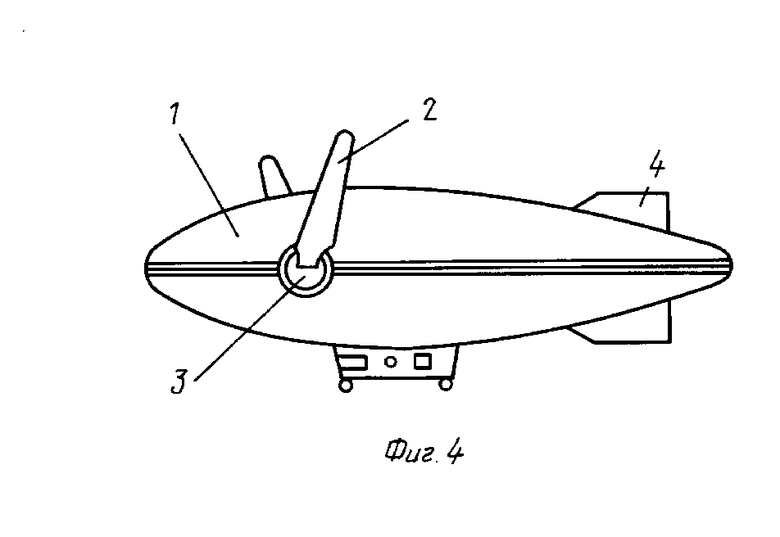
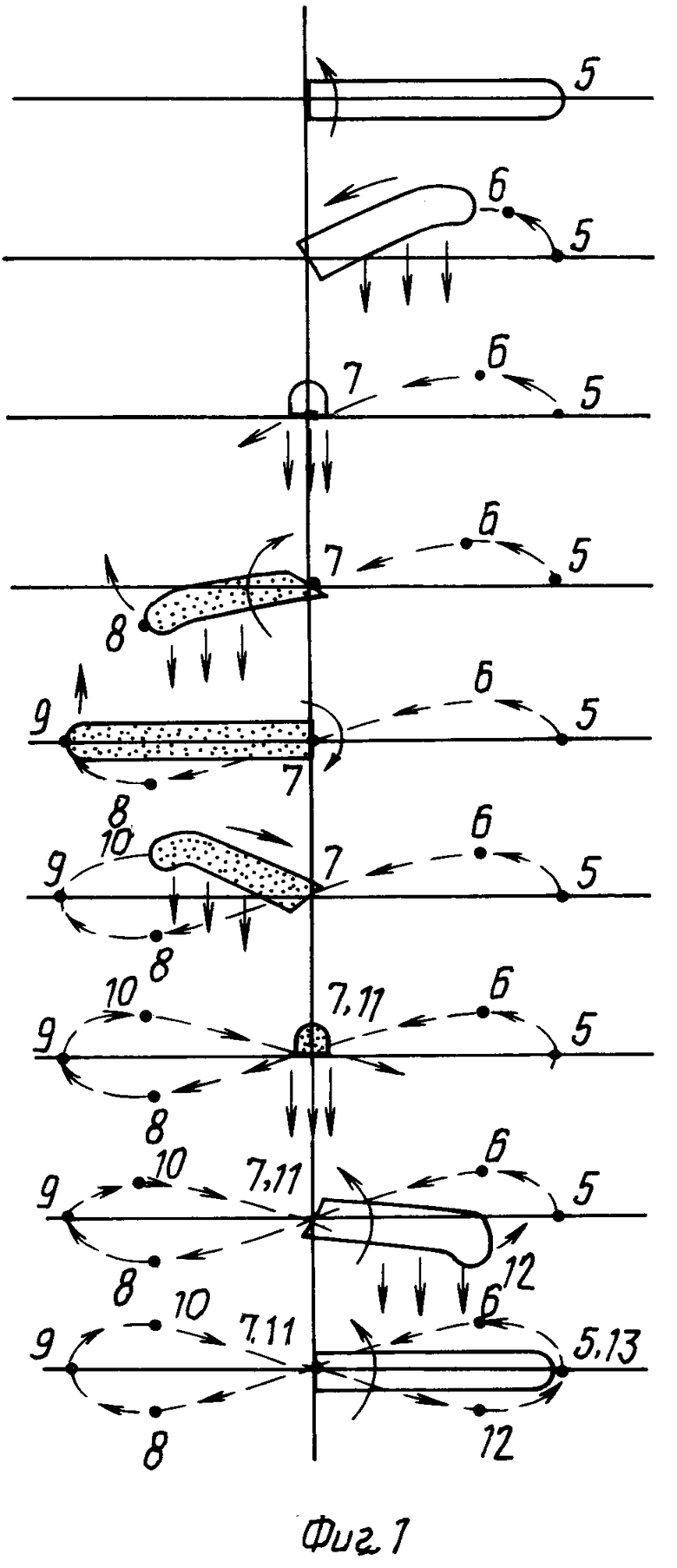
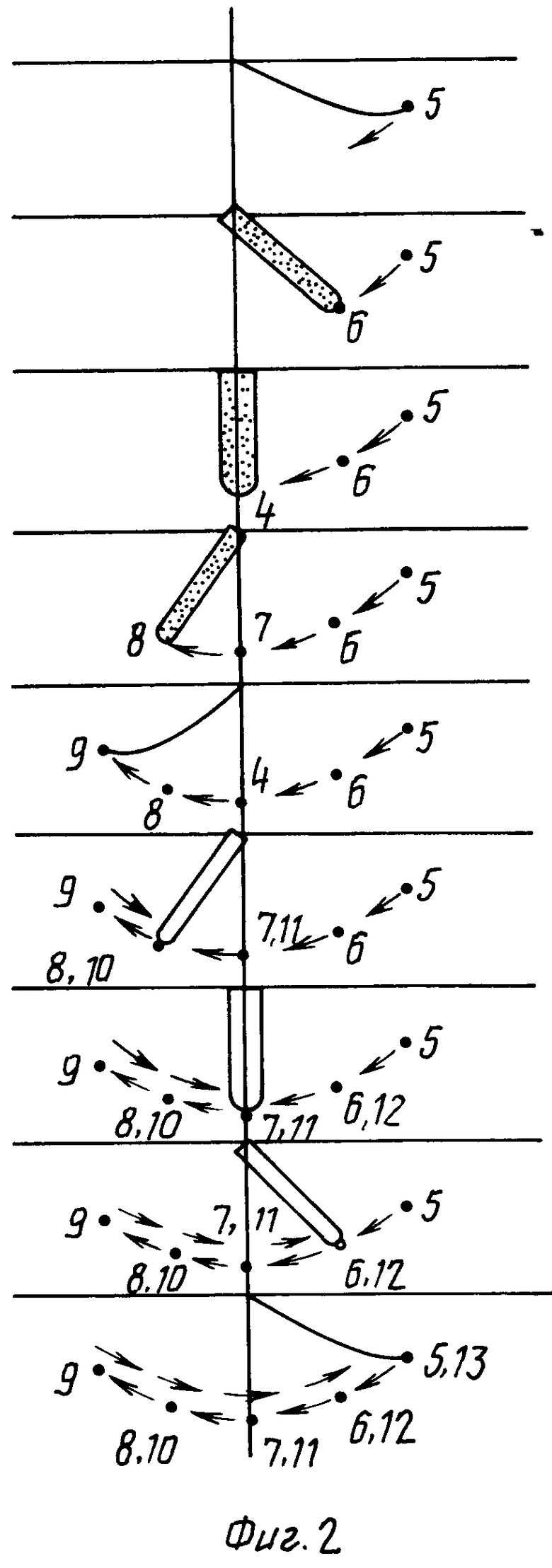
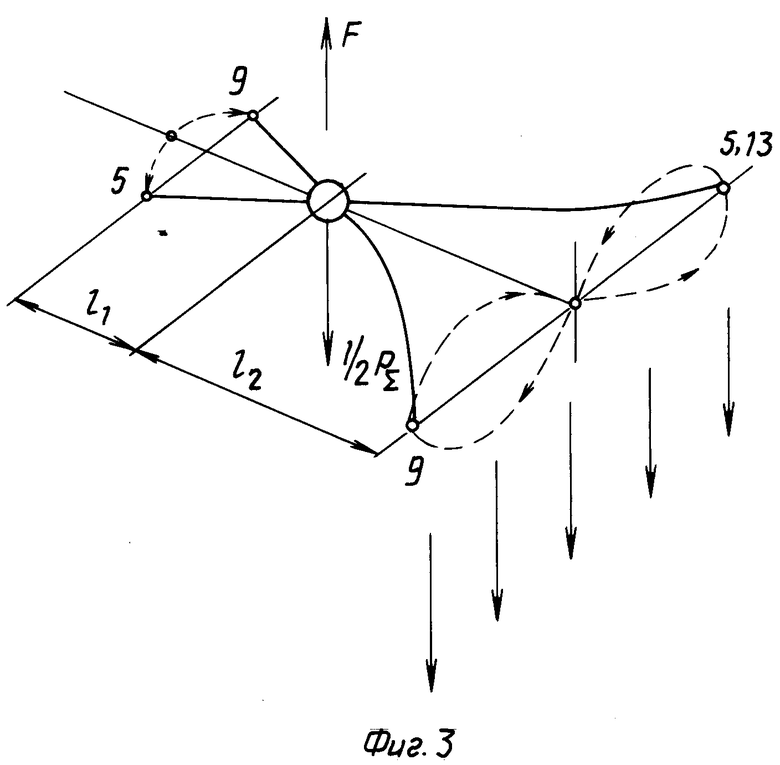
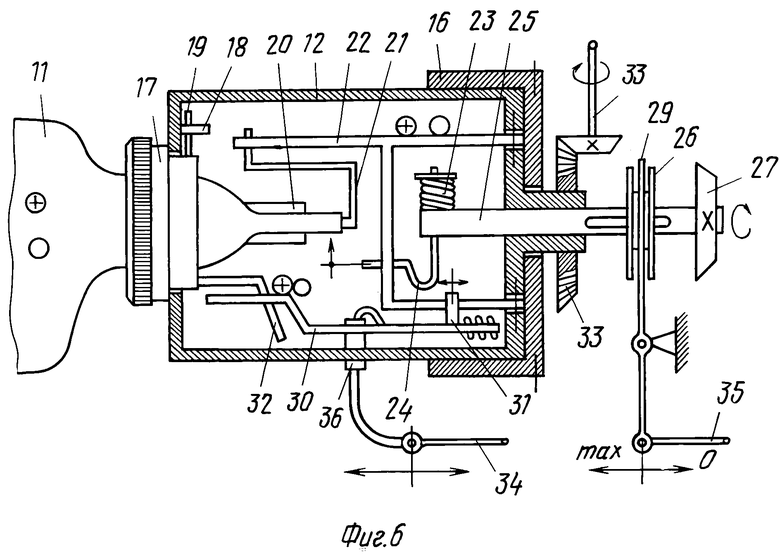
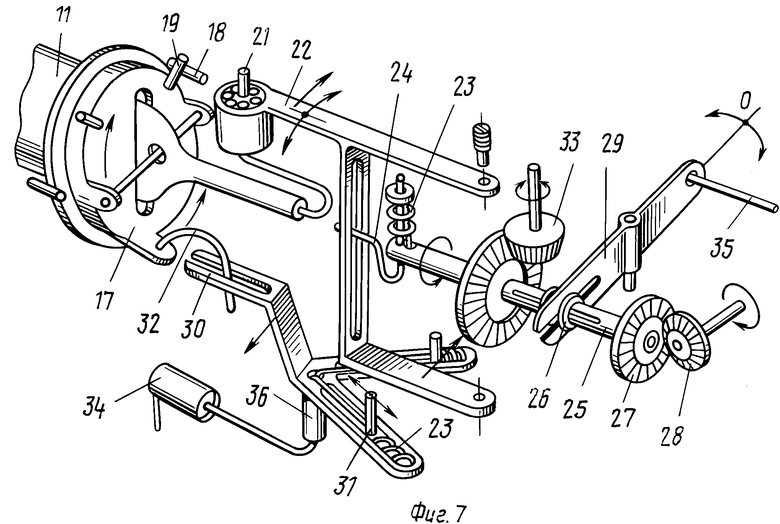
На фиг. 1 представлено машущее крыло, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - траектории движения гибкого крыла и жесткого его основания; на фиг. 4 - общий вид дирижабля; на фиг. 5 - положение плоскости взмахов в зависимости от направления полета; на фиг. 6 - разрез машущего механизма крыла; на фиг. 7 - кинематическая схема машущего механизма крыла.
Дирижабль содержит жесткий цельнометаллический корпус 1, наполненный гелием, пару гибких машущих крыльев 2, машущие механизмы с корпусом 3, хвостовой стабилизатор 4, кабину, шасси. Позициями 5-15 на фигурах изображены положения крыла 2. Машущий механизм содержит цилиндрический корпус 16, основание с подшипником 17, ограничитель 18, шпильку 19, плоскую пружину 20, поводок 21, подвижную полурамку 22, цилиндрическую пружину 23, кривошип 24, полую ось 25, втулку 26, коническую шестерню 27 конического тройника 28, вилкообразный рычаг 29, горизонтальный рычаг 30 с коротким и длинным концами, подвижные упоры 31, водило 32, конический привод 33 изменения плоскости взмахов, тягу гидропривода 34 изменения угла атаки, тягу гидропривода изменения амплитуды взмахов 35.
Машущий механизм размещен в цилиндрическом корпусе 16 с возможностью вращения в основании крыла 2. В одном основании цилиндрического корпуса 16 установлено крыло 2 в подшипнике 17 и две пружины 20, а в другом основании - ось 25 с переменной длины кривошипом 24 на одном конце, находящемся внутри цилиндра, втулкой 26 и конической шестерней 27 - на другом внешнем конце, при этом кривошип 24 входит в вертикальный паз подвижной полурамки 22 с одной удлиненной горизонтальной стороной, где подвижно укреплен фигурный поводок 21, входящий в отверстие основания крыла 2. Короткая сторона полурамки 32 может взаимодействовать с двумя упорами 31, закрепленными на раздвоенном конце рычага 30, в другом конце которого выполнен паз, в котором размещено водило 32, жестко соединенное с подшипником 17.
Гибкое плоское и упругое крыло 2 работает следующим образом (см. фиг. 1, 2).
В исходном положении 7 крыло установлено вертикально и максимально изогнуто. Под действием машущего механизма, основание крыла начинает вращаться вокруг своей оси против часовой стрелки, при этом изогнутый конец крыла идет вверх за счет плосткостной жесткости крыла, лобовое сопротивление минимально и основание крыла сдвигается вправо, инициируя начало маха крыла влево (положение 2). Изогнутое крыло стремится выпрямиться, чему способствует сила тяжести, действующая на крыло, и происходит резкое движение крыла вниз, в результате чего создается направленный вниз воздушный поток (см. положения 3 и 4 на фиг. 1, 2). Далее крыло начинает изгибаться в противоположную сторону за счет сил инерции, так как машущий механизм закончил маховое движение по горизонтали, а крыло еще продолжает маховое движение. В этом время начинается вращение основания крыла по часовой стрелке. Изогнутый конец крыла идет вертикально вверх с минимальным лобовым сопротивлением, описывая вторую петлю восьмеркообразной траектории (положение 5). Положения крыла 6-9 аналогичны положениям 8-11. Лобовое сопротивление 7, 11, 15 крыла минимально в положениях во 7, 11, 15, воздушная тяга максимальна в положениях 9, 10, 12, 13 и 14. При движении на крыло действуют упругие силы материала крыла и силы тяжести, которые вместе с пружинами, действующими на крыло в крайних маховых положениях, позволяют осуществить резонансно-колебательный режим работы машущего механизма и крыла, что повышает эффективность силовой установки.
Траектории движения гибкого крыла и жесткого основания крыла при махах в горизонтальной плоскости (на режимах полета "вертикальный подъем" или "зависание") представлены на фиг. 3.
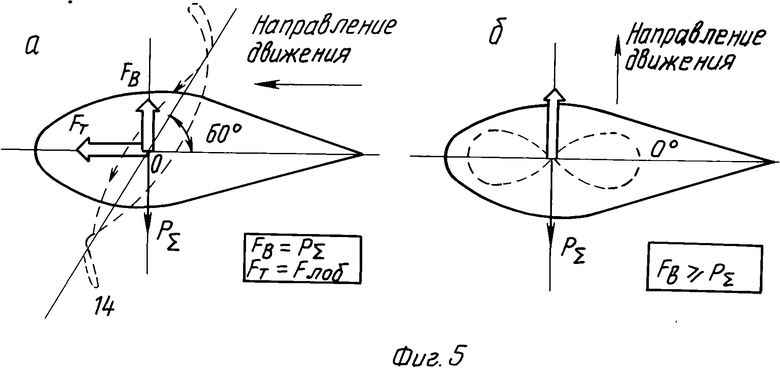
На режиме перемещения дирижабля "горизонтальный полет" необходима и составляющая сила тяги, направленная вперед по полету, поэтому плоскость махов крыльев должна быть другой, чем на режиме "вертикальный подъем" и составлять угол 60о с продольной осью дирижабля, при этом вертикальная составляющая силы тяги Fв уравновешивает вес PΣ дирижабля, а горизонтальная составляющая силы тяги Fт превышает силу лобового сопротивления Fлоб.
На режимах полета "вертикальный подъем" или "зависание" концы крыльев описывают восьмеркообразные траектории, а в режиме "горизонтальный полет" - сложную пространственную траекторию.
Работает машущий механизм следующим образом.
Вращающее усилие через конический тройник 28 с шестерни 27 через ось 25 и кривошип 24 передается на подвижную полурамку 22, которая начинает колебательные движения относительно своей оси. Эти движения через подвижно укрепленный на длинной горизонтальной стороне полурамки 22 фигурный поводок 21 передается основанию крыла 2, которое начинает совершать в горизонтальной плоскости маховые движения, причем на один оборот шестерни 27 реализуются два маховых движения крыла - влево и вправо. В крайних положениях полурамка 22 короткой горизонтальной стороной перемещает посредством упоров 31 рычаг 30, который при помощи водила 32 вращает подшипник 17, а вместе с подшипником 17 и крыло 2 вокруг его продольной оси, обеспечивая необходимый угол атаки. Вращение подшипника 17 ограничивается ограничителями 18. Регулировка угла атаки крыла производится гидроприводом 34 путем перемещения упоров 31 вдоль раздвоенных концов рычага 30, при этом изменяется амплитуда горизонтальных движений длинного плеча рычага 30, при помощи водила 32 изменяется угол вращения подшипника 17 и, следовательно, угол атаки крыла 2.
Регулировка амплитуды взмахов крыла производится гидроприводом 35 путем перемещения рычагом 29 втулки 26 вдоль оси 25. Втулка 26 гибко связана с подпружиненным концом кривошипа 24, который при этом изменяет свою амплитуду, в результате чего изменяется амплитуда колебаний полурамки 22 и, следовательно, изменяется и амплитуда взмаха крыла 2.
Изменение плоскости взмахов крыльев осуществляется электроприводом через коническую пару 33, большая шестерня которой жестко связана с цилиндрическим корпусом 16 машущего механизма.
Складывание крыльев производится электроприводом (не показан) путем вращения основания машущего механизма 16 вокруг его вертикальной оси. (56) Патент Германии N 70409, кл. В 31, 1892.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНАЯ ЛОДКА | 1992 |
|
RU2027634C1 |
| МАХОЛЕТ | 1993 |
|
RU2063367C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 1997 |
|
RU2128132C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| Способ создания подъемной силы летательного аппарата | 2024 |
|
RU2831867C1 |
| МАХОЛЕТ | 1995 |
|
RU2081033C1 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
| МАХОЛЕТ | 2008 |
|
RU2369526C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ОРНИТОПТЕРА | 2002 |
|
RU2236988C2 |
Изобретение относится к летательным аппаратам легче воздуха, а именно к дирижаблям. Целью изобретения является повышение эффективности, безопасности полета и маневренности. Дирижабль содержит жесткий корпус 1, наполненный гелием, пару гибких машущих крыльев 2, машущие механизмы с корпусом 3, хвостовой стабилизатор 4, кабину, шасси. 5 з. п. ф-лы, 7 ил.