Изобретение относится к лабораторному оборудованию и предназначено для химических и медицинских лабораторий.
Известна пипетка, включающая корпус, размещенную в нижней части корпуса насадку, кинематически связанный с многопозиционным приводом дозирующий узел и всасывающим элементом и взаимодействующим с ним нажимным приспособлением, установленным в направляющих, вертикальные подпружиненные планки с горизонтальными треугольными пазами, установленные с двух сторон от нажимного приспособления и взаимодействующим с ним через треугольные пазы (1).
Однако пипетка недостаточно удобна в эксплуатации из-за недостаточного количества позиций и отбираемых доз.
Целью изобретения является обеспечение удобства эксплуатации за счет увеличения количества получаемых различных доз.
Поставленная цель достигается тем, что пипетка снабжена фиксаторами и выполненными с возможностью взаимодействия с фиксаторами ответными элементами, многопозиционный привод снабжен, по меньшей мере, одним подпружиненным кожухом со стопором, регистраторы и ответные элементы размещены по меньшей мере в двух группах, где расстояние между ответными элементами и фиксаторами равно произведению расстояния между ответными элементами или фиксаторами предыдущей группы на количество ответных элементов и фиксаторов в данной группе, ответные элементы выполнены в виде треугольных пазов, расположенных по длине планок со стороны, противоположной пазам, взаимодействующим с нажимным приспособлением, планка установлена с возможностью продольного перемещения относительно кожуха при вывернутом стопор и полупоперечного перемещения при завинчивании стопора.
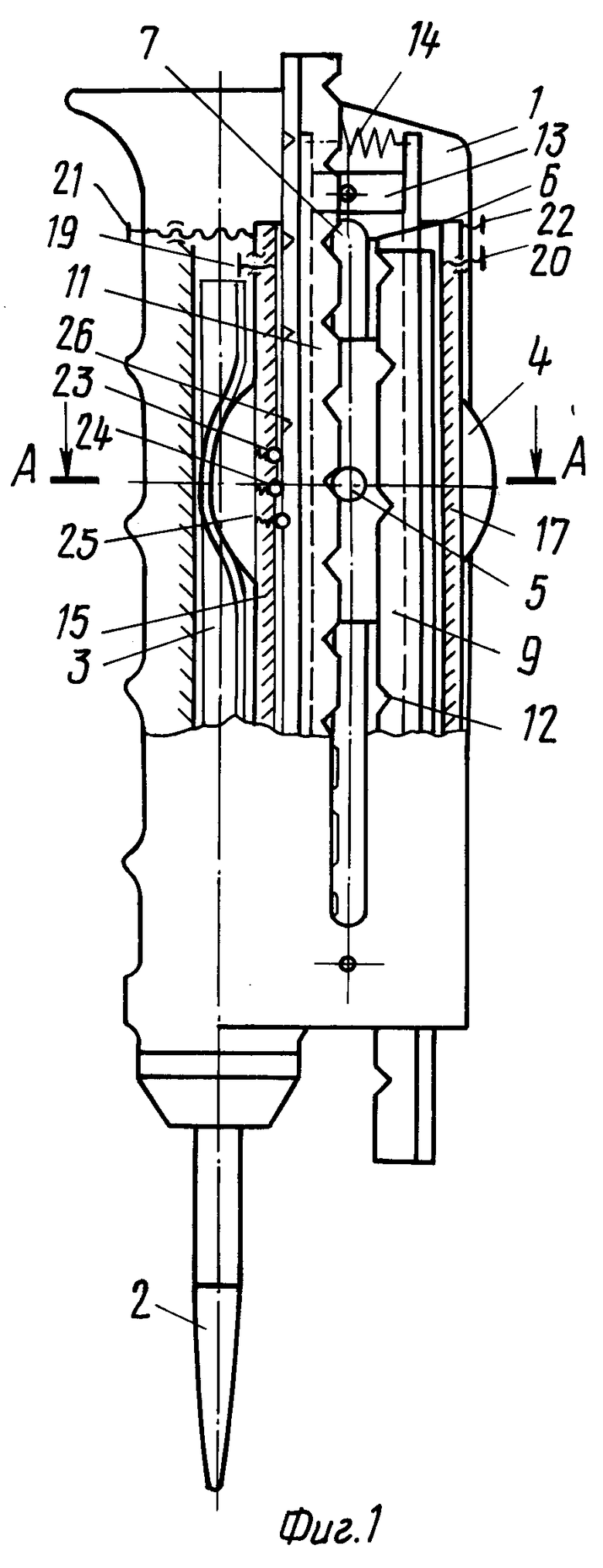
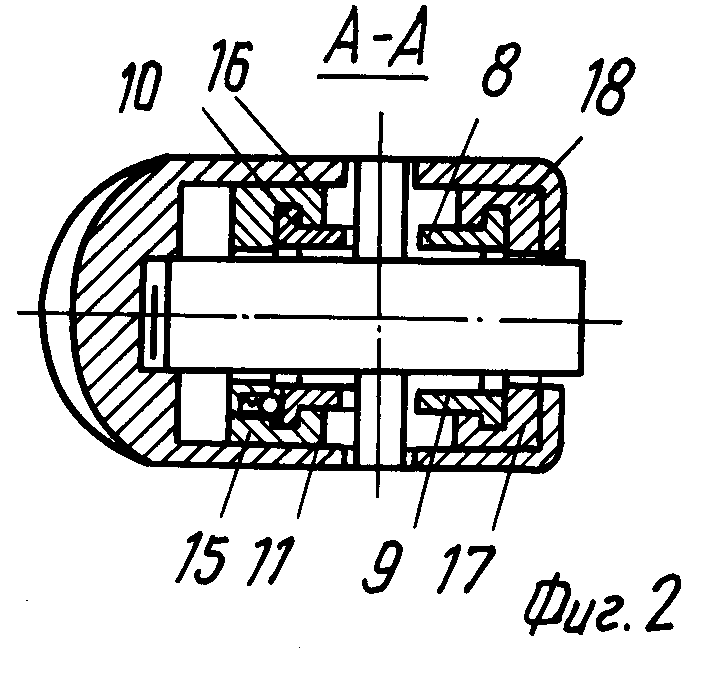
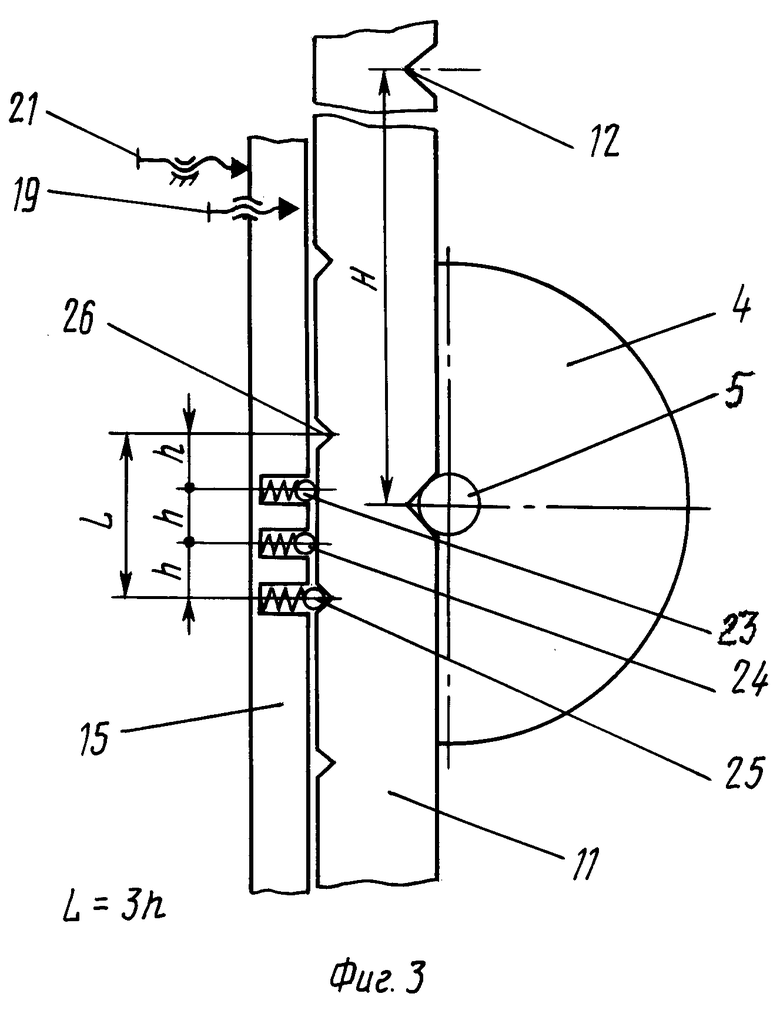
На фиг.1 приведена конструкция пипетки, где в качестве дозирующего узла используют эластичный шланг, закрепленный с двух концов корпуса; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - механизм фиксации дозы.
Пипетка содержит корпус 1, насадку 2, расположенную в нижней части корпуса 1, дозирующий узел, состоящий из цилиндра с поршнем и штоком или в данном примере из эластичного шланга 3, закрепленного на корпусе 1 и соединенного одним концом с насадкой 2, ролик 4, укрепленный на оси 5 и взаимодействующий со шлангом 2, и две рейки 6, жестко соединенные с корпусом 1 и имеющие направляющие вырезы 7. Ролик 4 установлен в корпусе 1 без люфта. Ось ролика 4 установлена в направляющих 7 реек 6 с возможностью перемещения (функции реек 6 могут выполнять пазы в корпусе, когда корпус изготавливают из двух симметричных половинок). Пипетка содержит планки 8,9,10,11 с треугольными пазами 12, контактирующими (взаимодействующими) с осью 5 ролика 4. Планки 8,10 и 9,11 смещаются относительно оси 5 с помощью эксцентрика 13, выполненного например, в виде четырехгранника, и фиксируются путем прижатия силовым воздействием пружин 14. Ось эксцентрика 13 соединена с корпусом. Планки 8,9,10,11 установлены с возможностью поперечного перемещения в кожухах 15,16,17,18, расположенных с обоих сторон ролика 4. Кожухи 15,17 и 16,18 соединены на концах пружинами 14, силовое воздействие которых направлено на сближение их друг к другу и, следовательно, расположенных в них планок 8,10 и 9,11. Кожухи 15,17,18,19 снабжены механизмами 19,20 планок 9,11 с целью исключения их продольного перемещения (механизмы крепления планок 8,10 не показаны). Механизмы 19,20 выполнены, например, в виде винтов. С помощью эксцентриков 13 кожухи 15,16,17,18 с планками 8,9,10,11 могут устанавливаться в положение, когда с осью 5 ролика 4 взаимодействуют конические прорези либо планки 8, либо 9, либо 10, либо 11, либо 8 и 9, либо 10 и 11, либо ни одна из перечисленных планок не взаимодействует. Треугольные пазы 12 на планках 8,9,10,11 смещены относительно друг друга. Кожухи 15,16,17,18 дополнительно снабжены (стопорами) механизмами 21,22 для закрепления и исключения перемещения кожухов 15,16,17,18 в поперечном направлении. При этом соответствующая планка 8, 9, 10, 11 прижимается одному из пазов 12 к оси 5 ролика 4 и не позволяет оси 5 выйти из паза 12. Кроме того, кожухи 15,16,17,18 дополнительно снабжены фиксаторами, например, тремя 23,24,25, выполненными в виде подпружиненных шариков, а планки 8,9,10,11 дополнительными ответными элементами 26, выполненными, например, в виде дополнительных конических вырезов (или фасок), расположенными на противоположной поверхности планок 8,9,10,11 с возможностью взаимодействия с фиксаторами 23,24,25.
Пипетка имеет несколько вариантов работы. Первый, когда механизмы 21,22 устанавливают в положение, которое позволяет кожухам 15,16,17,18 перемещаться в поперечном направлении. А с помощью механизмов 19,20 закрепляют планки 8,9, 10,11 с кожухом 15,16,17,18 и исключают их продольное перемещение. Наконечник 2 опускается в жидкость, которую необходимо дозировать. При вращении ролика 4 большим пальцем руки против часовой стрелки ролик 4 будет перемещаться вверх, формируя в шланге 3 вакуум, и следовательно, заполняя его жидкостью. Если нужно отобрать и отдозировать требуемую дозу, то ролик 4 перемещают до соответствующего паза (ответного элемента) 12 в соответствующей из планок 8,9,10,11. После чего наконечник 2 пипетки помещают в емкость, в которую нужно отдозировать жидкость и вращают ролик 4 по направлению движения часовой стрелки до тех пор, пока ось 5 ролика 4 не попадает в соответствующий конический вырез, характеризующий требуемую дозу. При этом величина дозы определяется как произведение площади поперечного сечения шланга (цилиндра) на величину расстояния Н между коническими вырезами
H = L˙ b = h˙ a˙ b, где L - расстояние между коническими вырезами (ответными элементами) первой группы;
H - расстояние между треугольными пазами (ответными элементами) второй группы, контактирующими с осью 5 ролика 4;
h - расстояние между чувствительными элементами;
a - количество чувствительных элементов;
b - количество ответных элементов первой группы, контактирующих с чувствительными элементами 23,24,25. После чего процессы повторяются.
Забор жидкости осуществляется так же фиксирующими дозами. Если после забора жидкости необходимо сменить величину дозы, то это можно осуществить с помощью эксцентриков 13. Отводя от оси 5 ролика 4 одну или две планки и подводя одну или две другие планки, например, 8,9 у которых треугольные пазы 12 смещены относительно друг друга (т.е. расстояния между пазами 12 другие и, следовательно, будут выдаваться другие дозы).
Другой режим работы пипетки получают если с помощью механизмов 21,22 застопорить кожухи 15,16,17,18, что исключает их поперечное перемещение, прижимает планки 8,9,10,11 к оси 5 ролика 4 и не позволяет оси 5 выходить из паза 12. С помощью механизмов 19,20 расфиксируют планки 8,9,10,11 и они могут продольно перемещаться относительно кожухов 15,16,17,18, а конические вырезы другой группы (ответные элементы) 26 начинают взаимодействовать с чувствительными элементами (фиксаторами) 23,24,25. Если расстояние между чувствительными элементами (h), а их количество (a=3), то расстояние L - между ответными элементами 26 первой группы (коническими вырезами) равно L = ah = 3h. Аналогичным образом при вращении ролика 4 ось 5 уже не сможет выйти из конических прорезей (ответных элементов) 12, т.к. кожух лишен возможности поперечного перемещения. Следовательно планка, например 8, начнет перемещаться вместе с роликом, при этом ответный элемент 26 вначале будет взаимодействовать, например, с чувствительным элементом (фиксатором) 23 и выдает одну дозу, равную площади поперечного сечения шланга (цилиндра) на расстояние (h) между чувствительными элементами. Перемещая ролик 4 дальше этот же ответный элемент 26 попадает в другой чувствительный элемент (фиксатор) 24 и пипетка выдает вторую дозу, равную двум первым при дозировании в одну емкость или две одинаковые дозы при дозировании в разные емкости. При дальнейшем перемещении ролика в тот же ответный элемент 26 попадает чувствительный элемент 25 и будет получена третья доза. Если a = 3, b = 3, то можно получить количество доз m = a˙ b -1 = a2-1 = 8. Если (с) - количество ответных элементов второй группы, то можно получить максимальное количество доз m = a3 - 1, b3-1 или c3-1 или m = a˙ b˙ c -1 если a,b и c не равны между собой. Если фиксаторы (чувствительные элементы) больше не устанавливаются, то расстояние между ответными элементами другой планки, контактирующими с осью будут равны H˙ c = h˙ a˙ b ˙ c, где c - количество ответных элементов предыдущей группы, а количество доз при a = b = c равно a4-1 и т.д. Если вводится дополнительная группа чувствительных элементов, то расстояние между ними определяется аналогичным образом, т.е. расстояние между фиксаторами (чувствительными элементами) будет равно h = a˙ b˙ d, а расстояние между третьей группой ответных элементов соответственно будет h = a˙ b˙ d˙ q, где q - количество дополнительных чувствительных элементов второй группы. Тогда количество получаемых доз m = Kn-1, где n - количество различных групп чувствительных и ответных элементов; K - количество элементов в одной группе, где количество элементов в различных группах равны. Возможно и более простое исполнение многопозиционного привода применительно к пипетке. В этом случае планку устанавливают в направляющей корпуса, а по меньшей мере одна торцевая поверхность оси 4 снабжена фиксатором, взаимодействующим с ответными элементами планки, выполненными в виде отверстий или углублений. В этом случае не требуется подпружинивать планку и требуется один стопор планки. Ось ролика может быть снабжена поводком (планкой), в которую вставляется ось ролика с возможностью вращения. Сам поводок перемещается по прорези (под ось) в корпусе и снабжен группой чувствительных элементов, взаимодействующих с планкой. Таким образом расположение чувствительных или ответных элементов каждой следующей группы на расстоянии, равном произведению расстояния между элементами предыдущей группы на количество элементов этой группы, позволит увеличить количество позиций в приводе и как следствие количество различных выдаваемых доз, что улучшает удобство эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ И РЕГУЛИРОВАНИЯ НЕСООСНОСТИ | 2014 |
|
RU2605785C2 |
| Многопозиционный сборочный автомат | 1981 |
|
SU921760A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| ЗАДАТЧИК | 1991 |
|
RU2028668C1 |
| ГЕНЕРАТОР ИМПУЛЬСОВ | 1992 |
|
RU2032840C1 |
| Устройство для удаления воздуха из шприцев с жидком медикаментом | 1977 |
|
SU654293A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СТЕНОВЫХ ДЕТАЛЕЙ И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2015004C1 |
| СПОСОБ КОНТРОЛЯ СООСНОСТИ ВАЛОВ МАШИН | 2003 |
|
RU2242708C1 |
| МНОГОПОЗИЦИОННАЯ ВРАЩАЮЩАЯСЯ УСТАНОВКА ДЛЯ ДЕМОНСТРАЦИИ ИНФОРМАЦИОННЫХ МАТЕРИАЛОВ | 2007 |
|
RU2336575C1 |
| АВТОМАТИЧЕСКИЙ МЕХАНИЗМ ЗАРЯЖАНИЯ ПУШКИ | 2001 |
|
RU2195617C1 |
Сущность изобретения: пипетка содержит корпус, размещенную в нижней части корпуса насадку, кинематически связанный с многопозиционным приводом дозирующий узел с всасываюшим элементом и взаимодействующим с ним нажимным приспособлением, установленным в направляющих, вертикальные под пружиненные планки с горизонтальными пазами, установленные с двух сторон от нажимного приспособления и взаимодействуюшие с ним через треугольные пазы, фиксаторы и выполненные с возможностью взаимодействия с фиксаторами ответные элементы. Многопозиционный привод снабжен, по меньшей мере одним подпружиненным кожухом со стопором. Фиксаторы и ответные элементы размещены меньшей мере в двух группах, где расстояние между ответными элементами или фиксаторами равно произведению расстояния между ответными элементами или фиксаторами предыдущей группы на количество ответных элементов или фиксаторов в данной группе. 13 п. ф-лы. 3 ил._
| Штамп для вытяжки цилиндрических изделий без утонения стенки из ленты | 1989 |
|
SU1722657A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
