Изобретение относится к импульсной технике, к системам, преобразующим сигналы датчиков, и может быть использовано в устройствах, где требуется количественно оценить превышение одной составляющей сигнала над другой в определенном промежутке действия этого сигнала, причем обе составляющие являются частью общего сигнала датчика, а по величине различия - произвести коррекцию какого-либо параметра устройства. Изобретение может быть использовано также в электронных системах зажигания, корректирующих угол опережения зажигания (УОЗ) в запаздывание при определении детонационного процесса сгорания топливно-воздушной смеси (ТВС) в цилиндрах двигателя внутреннего сгорания (ДВС).
Известен способ количественной оценки интенсивности детонации (ИД) в каждом цилиндре ДВС, причем для этого предусмотрен датчик углового положения коленчатого вала (УПКВ), посредством которого происходит формирование двух постоянных по УПКВ секторов, причем в первом секторе, сформированном до верхней мертвой точки (ВМТ), происходит считывание информации о механических шумах ДВС Uvb, а во втором, сформированном после ВМТ, происходит считывание информации о детонационной составляющей общего сигнала датчика Ukb. Информация считывается как пиковые значения сигнала, а в конце сектора детонации происходит обнуление значений. Для обработки сигналов предусмотрены специальные средства, в результате чего ИД определяется как напряжение Uа, пропорциональное процентному превосходству пикового напряжения U b в секторе ожидаемой детонации над пиковым напряжением U
b в секторе ожидаемой детонации над пиковым напряжением U b в секторе заведомо недетонационного сгорания ТВС или вместо процентного отношения Uа может быть отнесено к некоторому известному максимальному напряжению Uamax:
b в секторе заведомо недетонационного сгорания ТВС или вместо процентного отношения Uа может быть отнесено к некоторому известному максимальному напряжению Uamax: =
=  .
.
Основным недостатком датчика детонации является низкая точность определения ИД, что влечет за собой ошибки при определении величины коррекции УОЗ.
Известен также способ распознавания детонационного сгорания ТВС, согласно которому посредством по крайней мере одного датчика детонации и одного датчика УПКВ все относящиеся к одному из цилиндров ДВС сектора располагают в интервале после определения его ВМТ и до определения ВМТ следующего в соответствии с тактностью работы ДВС цилиндра. При этом первый сектор располагают в зоне ожидаемой детонации, второй сектор - в заведомо недетонационной зоне, а в третьем секторе, следующем за вторым, производят сравнение уровней сигналов, полученных в первом и втором секторах, и по результату судят о наличии (отсутствии) детонации в этом цилиндре, после чего производят сброс информации.
Однако простое сравнение уровней сигналов, полученных в первом и втором секторах, не позволяет определить величину коррекции УОЗ.
Наиболее близким техническим решением является способ, согласно которому предусмотрены датчик вибрации, установленный на ДВС, и электронный детектор детонации. По данному способу ИД определяют как превышение пикового сигнала датчика над огибающей, сформированной в течение всего периода (от ВМТ контролируемого цилиндра до ВМТ следующего в соответствии с тактностью ДВС цилиндра). По длительности импульса, выделенного таким образом, судят о величине ИД и соответственно корректируют УОЗ.
Основным недостатком прототипа является низкая точность измерения ИД, так как за период измерения оцениваются также и посторонние шумы, вызванные вибрациями, не относящимися к детонации. Кроме того, оценка ИД только по длительности импульса не учитывает всех параметров детонационного процесса сгорания ТВС.
Целью изобретения является повышение точности распознавания детонационного процесса сгорания ТВС, а также расширение функциональных возможностей за счет определения величины коррекции УОЗ путем количественной оценки ИД.
Результатом более точного по отношению к прототипу определения ИД может стать увеличение мощностных и экономических показателей ДВС, а также продление срока службы двигателя в целом и отдельных его узлов и агрегатов в частности. Кроме того, положительный эффект может быть достигнут по эргономическим показателям ДВС, в частности улучшении комфортности автомобиля.
Согласно предложенному способу формируют сигналы первого и второго секторов, в пределах которых производят измерение сигнала датчика детонации, причем все относящиеся к одному из цилиндров ВМТ и до определения ВМТ следующего в соответствии с тактностью работы двигателя цилиндра, при этом первый сектор располагают в зоне ожидаемой детонации, а второй сектор - в заведомо недетонационной зоне, определяют интенсивностью детонации согласно формуле
ИД =  Ac1(t)dt-
Ac1(t)dt- Ac2(t)dt где Ac1 (t) dt - сигнал датчика детонации, определенный в первом секторе;
Ac2(t)dt где Ac1 (t) dt - сигнал датчика детонации, определенный в первом секторе;
Ac2 (t)dt - сигнал датчика детонации, определенный во втором секторе;
t - длительность первого и второго секторов.
Полученный результат преобразуют в последовательность импульсов и по их количеству определяют величину коррекции УОЗ.
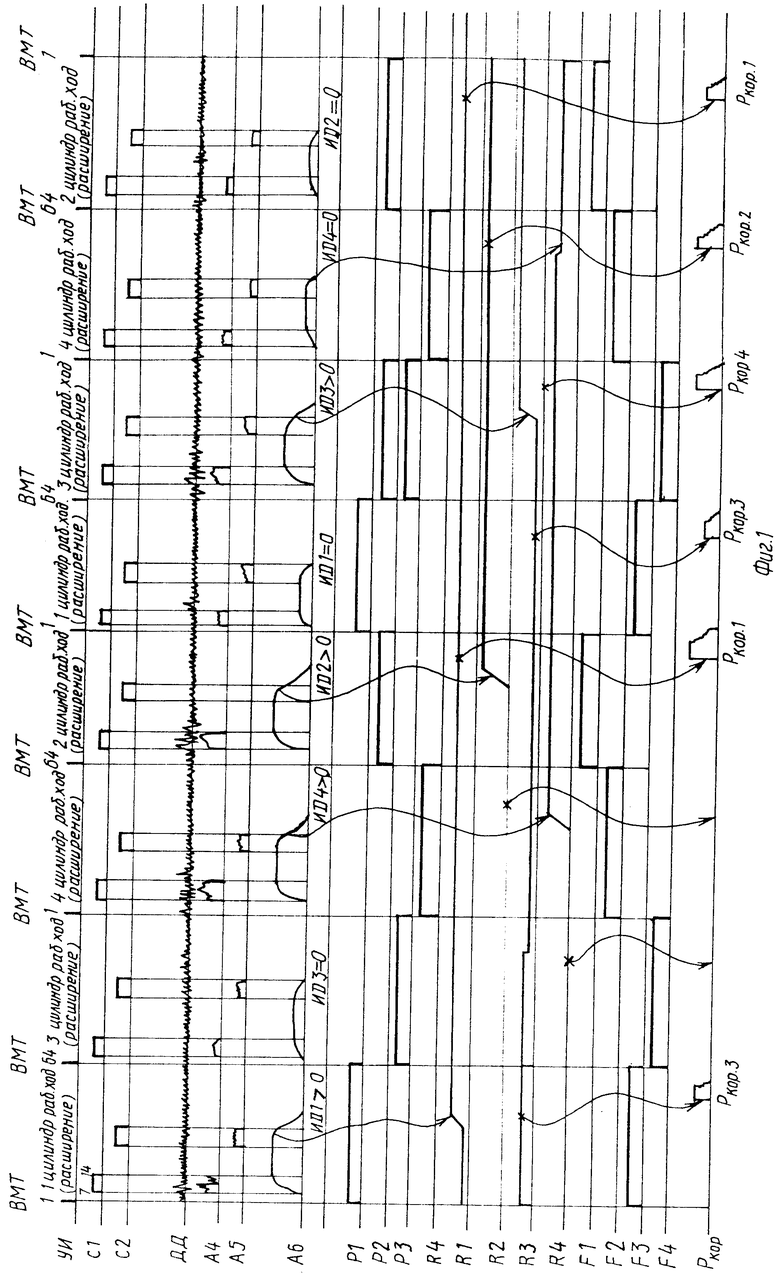
На фиг. 1 представлен алгоритм определения величины коррекции УОЗ ДВС индивидуально по каждому цилиндру, где приняты следующие обозначения:
УИ - угловые импульсы датчика УПКВ;
ВМТ - верхняя мертвая точка;
Раб.ход (расширение) - рабочий ход, такт расширения;
С1 - сектор ожидаемой детонации С1;
С2 - сектор заведомо недетонационной зоны С2;
1,7,28,35 и т.д. - количество импульсов датчика УПКВ;
ДД - сигнал датчика детонации;
А4 - проинтегрированный в секторе С1 датчика детонации;
А5 - проинтегрированный в секторе С2 датчика детонации;
А6 - результирующий сигнал;
ИД1, ИД3 и т. д. - интенсивность детонации соответственно в первом, третьем и т.д. цилиндрах ДВС;
Р1...Р4 - каналы выбора текущего цилиндра;
R1. . . R4 - вычислители ИД, выраженной в количестве импульсов, в конкретном цилиндре ДВС;
F1. ..F4 - каналы выбора предыдущего по отношению к текущему цилиндру в соответствии с тактностью работы ДВС;
Ркор. 3, Ркор.1 и т.д. - величина коррекции УОЗ соответственно в третьем, первом и т.д. цилиндрах ДВС.
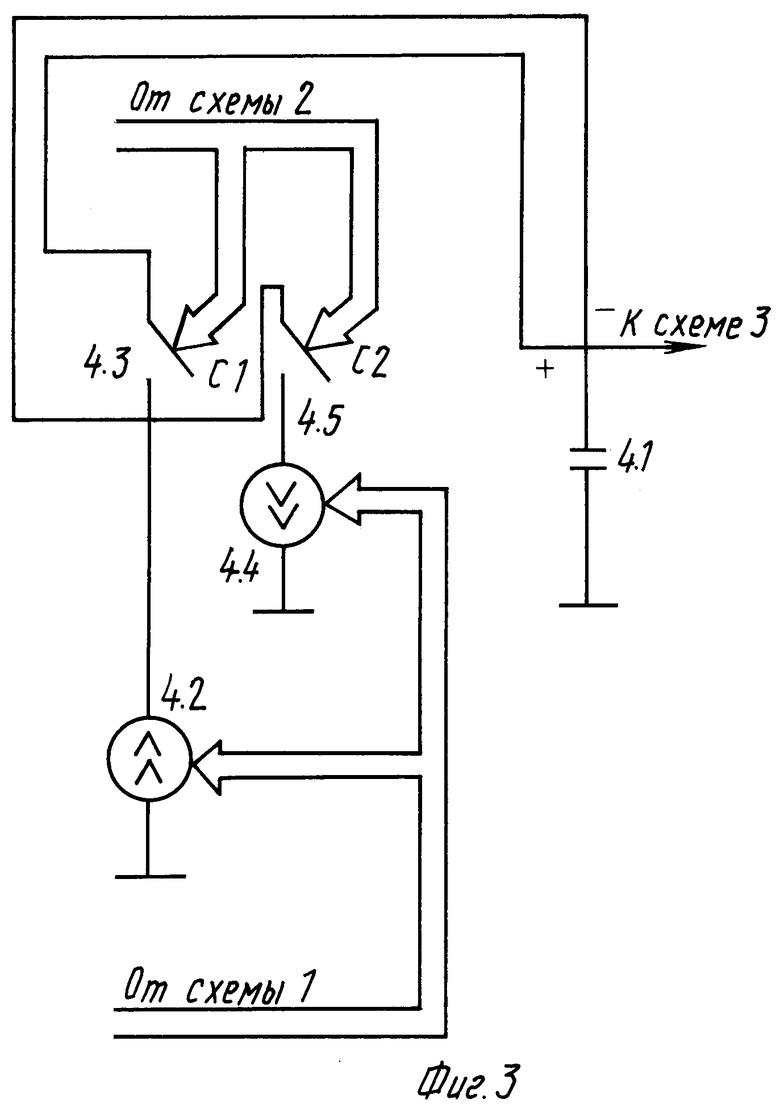
На фиг.2 представлена блок-схема устройства, реализующего предлагаемый способ; на фиг. 3 - пример реализации реверсивного накапливающего устройства.
Способ осуществляется следующим образом.
Посредством датчика УПКВ (см. фиг.1 диаграмма "УИ") определяют ВМТ каждого цилиндра ДВС, относительно которой через 20 град. ПКВ располагают начало сектора С1 ожидаемой детонации (диаграмма "С1").
Начало второго сектора С2 располагают после конца сектора С1 в заведомо недетонационной зоне (диаграмма "С2"). Детонация возникает только в такте расширения и, как правило, после прохождения максимума газов в цилиндре ДВС. Детонация представляет собой высокочастотные колебания на индикаторной диаграмме или высокочастотные составляющие сигнала вибрации датчика детонации типа акселерометр, установленного на поверхности, например, блока цилиндров ДВС (диаграмма "ДД"), хотя вместо акселерометра могут использоваться датчики звукового давления, тока ионизации и т.д. Поскольку детонационный процесс сгорания ТВС носит "взрывной" характер с ограниченной длительностью протекания процесса, то, интегрируя сигнал датчика детонации в течение сектора Сl, получают величину, учитывающую амплитуду, длительность и количество происшедших затухающих детонационных "взрывов" (стуков) и сигналов фонового шума, т.е. например, вибрации, вызванных механическими ударами сочлененных узлов и агрегатов ДВС, газораспределительного механизма, поршневой группы и т.д.
Интегрируя сигнал датчика детонации в секторе С2, где теоретически и практически наблюдаются только сигналы фонового шума, получают величину, учитывающую амплитуду, длительность и количество фоновых импульсов (диаграмма "А5").
Таким образом имеем Ac1(t)dt =
Ac1(t)dt =  Ac1Д(t)dt+
Ac1Д(t)dt+ Ac1Ш(t)dt (1) где Ас1д(t)dt - детонационная составляющая сигнала датчика детонации, определенная в секторе С1;
Ac1Ш(t)dt (1) где Ас1д(t)dt - детонационная составляющая сигнала датчика детонации, определенная в секторе С1;
Ас1ш(t)dt - шумовая составляющая сигнала датчика детонации, определенная в секторе С1.
 Ac2(t)dt =
Ac2(t)dt =  Ac2Ш(t)dt=
Ac2Ш(t)dt= Ac1Ш(t)dt (2)
Ac1Ш(t)dt (2)
Вычитая (диаграмма "А6") из (1) интеграл (2), Ac1(t)dt -
Ac1(t)dt -  Ac2(t)dt получаем интенсивность детонации, равную
Ac2(t)dt получаем интенсивность детонации, равную
ИД =  Ac1Д(t)dt , так как характер шумов в секторах С1 и С2 практически идентичен, что показали исследования, проведенные НПО "Автоэлектроника" отчеты N 210-50/9-87 и N 210-43/14-89.
Ac1Д(t)dt , так как характер шумов в секторах С1 и С2 практически идентичен, что показали исследования, проведенные НПО "Автоэлектроника" отчеты N 210-50/9-87 и N 210-43/14-89.
Полученный результат преобразуют в последовательность импульсов (диаграммы "R1...R4") и по их количеству определяют величину коррекции угла опережения зажигания (диаграмма "Ркор") индивидуально для каждого цилиндра ДВС.
Блок-схема устройства, реализующего способ, содержит схему 1 обработки, в которой выход датчика 1.1 детонации связан с входом усилителя 1.2, выход которого связан с входом полосового фильтра 1.3, выход которого связан с входом выпрямителя 1.4, схему 2 формирования, в которой выход датчика начала отсчета (ДНО) 2.1 соединен с входом формирователя ДНО 2.2, выход которого связан с первым входом схемы выделения сигнала 2.3. Датчик угловых импульсов (ДУИ) 2.4 соединен с формирователем ДУИ 2.5, выход которого связан с вторым входом схемы 2.3 и с первым входом схемы формирования секторов 2.6, второй вход которой связан с выходом схемы выделения сигнала 2.3. Выход схемы 2,3, кроме того, связан с входом схемы 3 преобразования, по выходу которой происходит обмен информации с реверсивным накапливающим устройством 4, которое, в свою очередь, имеет второй вход, по которому происходит получение информации от схемы 1 обработки и схемы формирования секторов 2.6.
Последовательность соединений 1.2...1.4 в схеме 1 обработки может быть иной, в том числе могут отсутствовать, например, элементы 1.2 или 1.4. В качестве датчика 1.1 детонации может быть использован, например, акселерометр типа ПДД-1 или ИДЗ. Усилитель 1.2, полосовой фильтр 1.3 и выпpямитель 1.4 могут быть выполнены любым известным в схемотехнике способом.
ДНО 2.1 и ДУИ 2.4 построены на магнитоэлектрическом принципе действия и используются в настоящее время вместе с формирователями Ф ДНО 2.2 и Ф ДУИ 2.5 на автомобилях ВАЗ-21083 и ВАЗ-21093 в составе микропроцессорной системы управления двигателем. Датчики размещаются вблизи маховика двигателя, для чего, например, для упомянутых автомобилей по всей длине маховика нарезают 128 зубьев, на которые реагирует ДУИ, т.е. один импульс Ф ДУИ составляет 2.8 град. ПКВ, и один зуб особой формы, на который реагирует ДНО, причем зуб ДНО синхронизирован с наступлением физического ВМТ в первом цилиндре ДВС. Схема выделения 2.3 может представлять собой счетчик или процессор микро-ЭВМ, который, например, для четырехтактного ДВС после "получения" первого сформированного импульса ДНО начинает счет сформированных импульсов Ф ДУИ и через 180 град. ПКВ или 64 импульса Ф ДУИ "выделяет" ВМТ следующего в соответствии с тактностью работы двигателя цилиндра. Схема формирования секторов 2.6 может быть реализована как счет или процессор микро-ЭВМ, который от "получения" первого импульса Ф ДНО начинает счет импульса Ф ДУИ таким образом, что начало первого сектора формируется, например, через 20 град. ПКВ после ВМТ (7 импульсов Ф ДУИ), а его конец через 40 град. ПКВ (14 импульсов Ф ДУИ). Начало второго сектора формируется, например, через 80 град. ПКВ после ВМТ (28 импульсов Ф ДУИ), а конец через 100 град. ПКВ (35 импульсов Ф ДУИ). Длительность секторов С1 и С2 выбирается равной по УПКВ, а положение сектора С2 зависит от типа двигателя и подбирается в каждом случае на основе эксперементальных исследований.
Схема формирования 2,6, кроме того, формирует каналы длительностью 180 град. ПКВ (64 импульса Ф ДУИ) Р1...Р4 выбора текущего цилиндра, начало которых синхронизировано с ВМТ первого текущего цилиндра и далее в соответствии с тактностью работы ДВС.
Схема 2.6 формирует и каналы F1...F4 выбора предыдущего цилиндра по отношению к текущему также в соответствии с тактностью работы ДВС, также длительностью 180 град. ПКВ (64 импульса Ф ДУИ), начало которых синхронизировано в ВМТ первого текущего цилиндра.
Схема 3 преобразования может быть реализована как процессор микро-ЭВМ, в программе которого преобразование выходного сигнала устройства 4, вычисление величины коррекции текущего УОЗ и изменение УОЗ в соответствующем цилиндре ДВС. Реализация схемы 3 преобразования известна, например, из ОКР ПО "Интеграл" "Дефлектор-4" для ДВС автомобилей ВАЗ-21083, но может быть выполнена и другими известными способами. Авторы не претендуют на конкретную реализацию схемы 3.
Реверсивное накапливающее устройство 4 может быть выполнено, например, как (см. фиг. 3) интегратор на конденсаторе 4.1, заряд которого осуществляется от источника 4.2 тока заряда через ключ 4.3, стробируемый в секторе С1, причем источник 4.2 управляется схемой 1 обработки. Разряд конденсатора 4.1 осуществляется от источника 4.4 тока разряда через ключ 4.5, сторбируемый в секторе С2, причем источник 4.4 также управляется схемой 1 обработки. Очевидно, что в случае выполнения реверсивного накапливающего устройства 4 по фиг.4 на входе схемы 3 преобразования должен быть предусмотрен аналого-цифровой преобразователь (АЦП), который преобразует аналоговый сигнал конденсатора 4.1 в последовательность импульсов или код.
Способ подразумевает выполнение следующих операций: обработку сигнала акселерометра 1.1 на усилителе 1.2, полосовом фильтре 1.3 (диаграмма "ДД"); обработку квазисинусоидальных сигналов датчиков ДНО 2.1 и ДУИ 2.4 на формирователях 2.2 и 2.5 соответственно; формирование ВМТ индивидуально для каждого цилиндра через 180 град. ПКВ на схеме выделения 2.3 (диаграмма "УИ"); формирование схемой 2.6 секторов С1 и С2 индивидуально для каждого цилиндра ДВС (диаграммы "С1" и "С2"); формирование схемой 2.6 каналов Р1... Р4 (диаграммы "Р1...Р2") выбора текущего цилиндра; формирование схемой 2.6 каналов F1. . .F4 (диаграммы "F1...F4") выбора предыдущего цилиндра по отношению к текущему; определение интенсивности детонации реверсивным накапливающим устройством 4 согласно формуле (диаграмма "А6")
ИД =  Ac1(t)dt-
Ac1(t)dt- Ac2(t)dt , где Ас1(t) - выходной сигнал схемы 1, определенный в секторе С1 (диаграмма "А4");
Ac2(t)dt , где Ас1(t) - выходной сигнал схемы 1, определенный в секторе С1 (диаграмма "А4");
Ас2(t) - выходной сигнал схемы 1, определенный в секторе С2 (диаграмма "А5");
t - длительность секторов С1 и С2; преобразование схемой 3 интенсивности детонации в последовательность импульсов, причем данное преобразование синхронизировано с каналами Р1...Р4 и осуществляется индивидуально для каждого цилиндра (диаграмма "R1...R4"); определение схемой 3 величины коррекции угла опережения зажигания, причем данное определение синхронизировано с каналами F1. . . F4 и осуществляется индивидуально для каждого цилиндра (диаграмма "Ркорр").
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ УГЛА ОПЕРЕЖЕНИЯ ЗАЖИГАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2074327C1 |
| Способ распознавания детонационного сгорания топливовоздушной смеси в двигателе внутреннего сгорания | 1990 |
|
SU1740764A1 |
| СПОСОБ ИЗМЕНЕНИЯ МОМЕНТА ИСКРООБРАЗОВАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2065075C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ОПЕРЕЖЕНИЯ ЗАЖИГАНИЯ К ДВИГАТЕЛЮ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2065073C1 |
| УСТРОЙСТВО ДЛЯ СИСТЕМЫ ЗАЖИГАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2065074C1 |
| Поршневой двигатель внутреннего сгорания | 2017 |
|
RU2698383C2 |
| АВТОМАТИЧЕСКИЙ КОРРЕКТОР ЗАЖИГАНИЯ ВОИНОВА | 1995 |
|
RU2099583C1 |
| Способ выявления детонации в двигателе внутреннего сгорания с искровым зажиганием | 1989 |
|
SU1665252A1 |
| Устройство управления зажиганием двигателя внутреннего сгорания | 1987 |
|
SU1492076A2 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПО ДЕТОНАЦИИ ПРИ ВЫХОДЕ ИЗ СТРОЯ ДАТЧИКА ФАЗЫ | 2000 |
|
RU2243407C2 |

Использование: электронные системы зажигания с коррекцией угла опережения при детонационном процессе сгорания топливно-воздушной смеси в цилиндрах двигателя внутреннего сгорания. Сущность изобретения: посредством по крайней мере одного датчика детонации и одного датчика определения углового положения коленчатого вала все относящиеся к одному из цилиндров двигателя сектора располагают в интервале после определения его верхней мертвой точки и до определения верхней мертвой точки следующего в соответствии с тактностью работы двигателя цилиндра, при этом первый сектор располагают в зоне ожидаемой детонации, а второй сектор - в заведомо недетонационной зоне, определяют интенсивность детонации согласно формуле, указанной в описании. Полученный результат преобразуют в последовательность импульсов и по их количеству определяют величину коррекции угла опережения зажигания. 3 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ КОРРЕКЦИИ УГЛА ОПЕРЕЖЕНИЯ ЗАЖИГАНИЯ двигателя внутреннего сгорания индивидуально по цилиндрам двигателя, заключающийся в том, что формируют сигналы первого и второго секторов, в пределах которых производят измерение сигнала вибрации, интегрируют измеренные сигналы и по результатам сравнения проинтегрированных сигналов определяют величину коррекции угла опережения зажигания, отличающийся тем, что, с целью повышения точности, сигнал первого сектора формируют после верхней мертвой точки соответствующего цилиндра, сигнал второго сектора формируют после формирования сигнала первого сектора до достижения верхней мертвой точки в следующем по порядку работы цилиндре, а результат сравнения проинтегрированных сигналов преобразуют в последовательность импульсов и по их количеству определяют величину коррекции угла опережения зажигания.
| Патент США N 4279143, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
