Изобретение относится к оптической локации и может быть использовано в системах предупреждения столкновений, навигации и управления воздушным движением.
Известен оптический локатор, который состоит из лазерного передатчика, который может быть непрерывным, лазерного приемника и оптического механического сканирующего устройства. Лазерный передатчик осуществляет формирование непрерывного лазерного луча, который поступает в оптико-механическое сканирующее устройство, осуществляющее сканирование лазерного луча по строкам и кадру в секторе до 120 град. Лазерный приемник осуществляет преобразование световых сигналов, отраженных от объектов, в электрические сигналы [1].
Известен оптический локатор, содержащий лазер, полупрозрачное зеркало, отражатель, первое колеблющееся зеркало, приемник излучения, систему обработки информации, сумматор и блок отображения информации [2].
Цель изобретения - уменьшение времени обзора, т.е. повышение быстродействия.
Достигается это тем, что в известный локатор, содержащий последовательно установленные и оптически сопряженные непрерывный лазерный передатчик, полу- прозрачное зеркало, отражатель, первое колеблющееся зеркало и первый приемник излучения, последовательно соединенные систему обработки сигнала, сумматор и индикатор, введены второе колеблющееся зеркало, первая и вторая вращающиеся призмы, снабженные соответственно первым и вторым приводами, первый и второй сельсин-датчики, первый и второй сельсин-приемники, датчик азимута, постоянное запоминающее устройство, последовательно установленные и механически соединенные третий привод, первый вал, кулачковый механизм и второй вал, а также третий вал, при этом система обработки сигнала выполнена в виде устройства определения дальности, первое и второе колеблющиеся зеркала оптически сопряжены соответственно с первой и второй вращающимися призмами, второй вал механически соединен с первым колеблющимся зеркалом и вторым сельсин-датчиком, выход которого соединен с третьим валом, который механически соединен с вторым колеблющимся зеркалом, второй привод механически соединен с входом первого сельсин-датчика, выход которого соединен с входом первого сельсин-приемника, выход которого механически соединен с первым приводом и датчиком азимута, выход которого соединен с вторым входом индикатора и с входом постоянного запоминающего устройства, выход которого соединен с вторым входом сумматора, второй оптический выход полупрозрачного зеркала оптически сопряжен с вторым колеблющимся зеркалом, которое также сопряжено с входом второго приемника излучения, выход которого соединен с вторым входом устройства определения дальности.
На фиг.1 представлена функциональная схема устройства. Она имеет: первый сельсин-датчик 1, первый сельсин-приемник 2, второй привод 3, первый привод 4, датчик азимута 5, постоянное запоминающее устройство 6, вторая вращающаяся призма 7, первая вращающаяся призма 8, индикатор 9, сумматор 10, второе колеблющееся зеркало 11, третий вал 12, второй сельсин-приемник 13, второй сельсин-датчик 14, первое колеблющееся зеркало 15, второй вал 16, кулачковый механизм 17, первый вал 18, третий привод 19, первый приемник излучения 20, второй приемник излучения 21, полупрозрачное зеркало 22, отражатель 23, непрерывный лазерный передатчик 24, измерительное устройство 25.
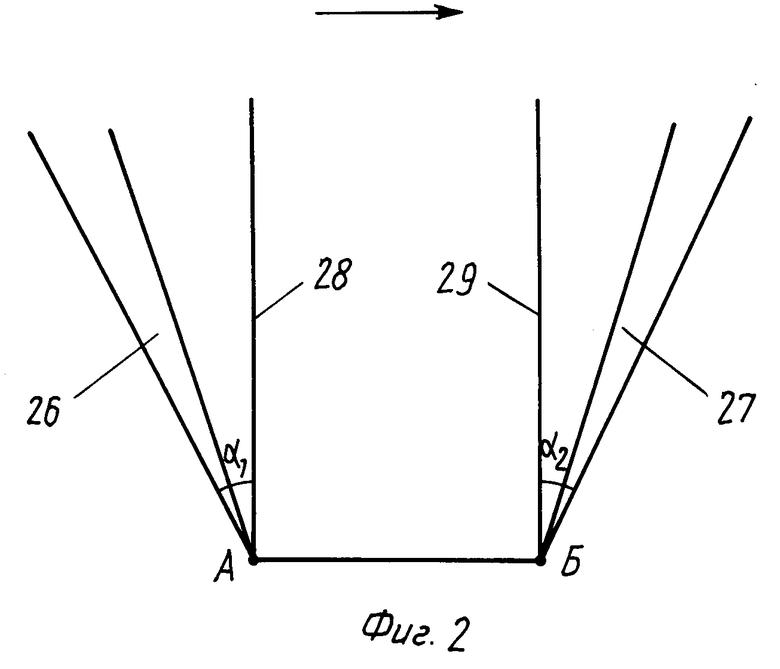
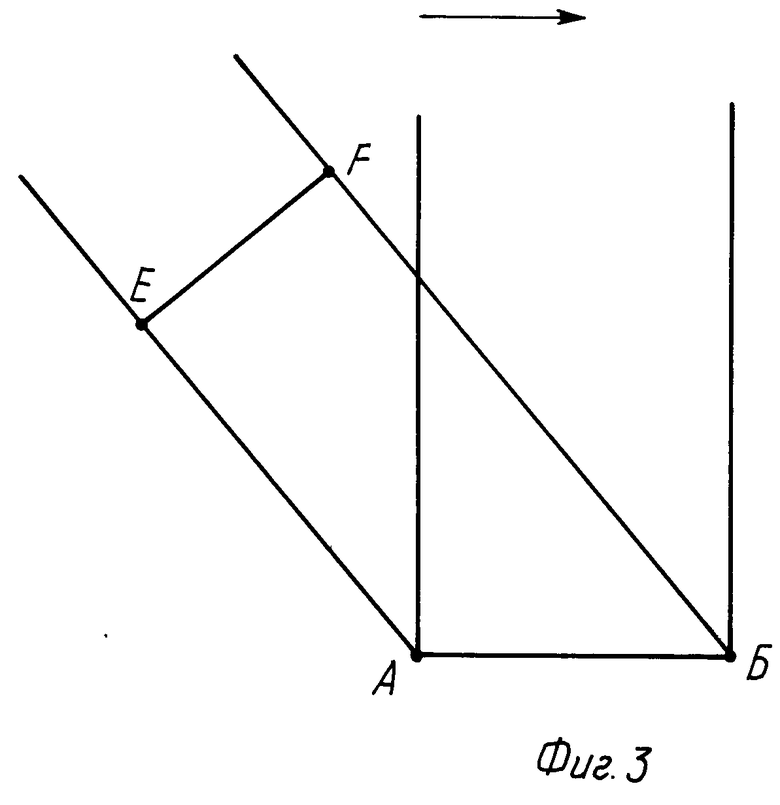
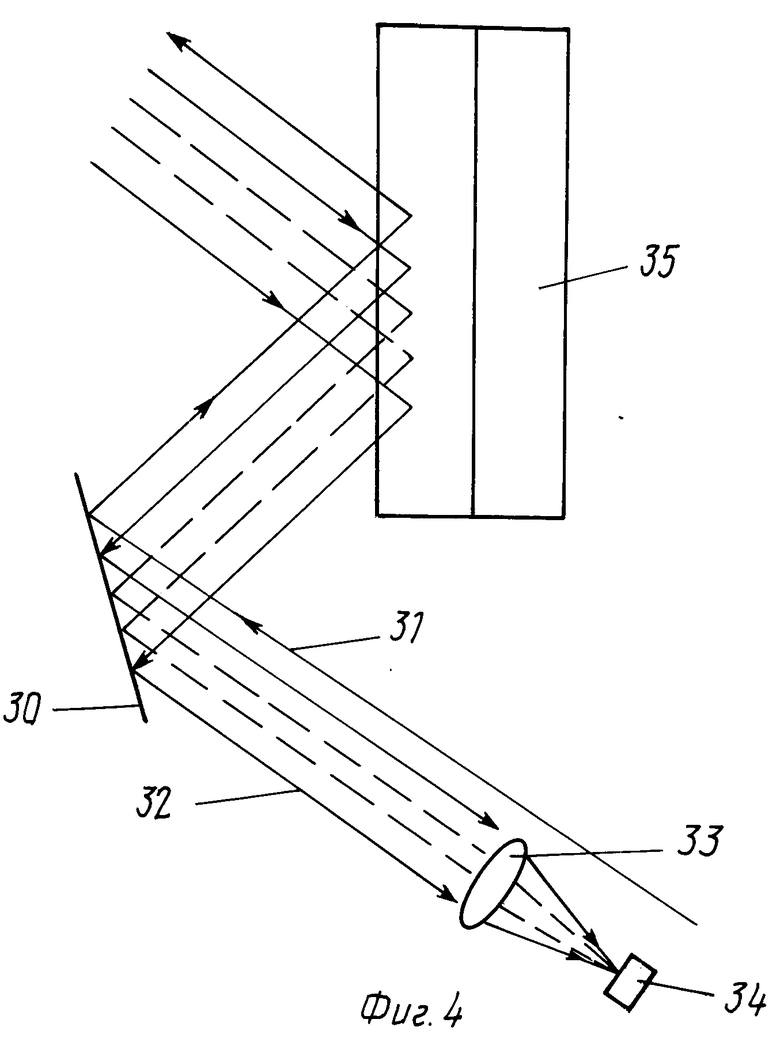
На фиг. 2 и 3 представлено взаимное расположение потоков излучения от двух зеркал; на фиг.4 - схема оптического взаимодействия лазерного излучения и оптических элементов схемы.
Она имеет: колеблющееся зеркало 30, лазерный луч 31, отраженная от объекта световая энергия 32, фокусирующая линза 33, приемник излучения 34, вращающаяся линза 35.
Устройство работает следующим образом.
Непрерывный лазерный передатчик 24 формирует лазерный луч, который проходит через полупрозрачное зеркало 22 ко второму колеблющемуся зеркалу 11 и одновременно отражается от этого полупрозрачного зеркала 22 и поступает к отражателю 23, отражается от него и поступает далее к повернутому по азимуту первому колеблющемуся зеркалу 15, причем вышеупомянутые зеркала 22 и 23 разнесены друг относительно друга на базовое расстояние. Отражатель 23 и повернутое по азимуту первое колеблющееся зеркало 15 повернуты таким образом, что их внешние линии, ограничивающие эти лучи 26 и 27 (фиг.2), образуют с линиями 28 и 29, перпендикулярными базе АБ, соответственно углы α1и α2, а суммарный угол расходимости α=α1+α2. Стрелкой показано направление сканирования. Расходимость необходима для обеспечения раздельного приема первым и вторым приемниками излучения 20 и 21 отраженной световой энергии при ускоренном оптико-механическом сканировании и может составлять, например, 5о. Сканирование осуществляется следующим образом. Вращающийся третий привод 19 механически связан через первый вал 18 с кулачковым механизмом 17, который в свою очередь через второй вал 16 также механически связан с повернутым по азимуту первым колеблющимся зеркалом 15, колебание которого осуществляется благодаря наличию кулачкового механизма 17. Кроме того, с помощью второго сельсина-датчика 14 и второго сельсина-приемника 13, механически связанного с третьим валом 12, осуществляется синхронное вращение этого третьего вала 12 с вышеупомянутым вторым валом 16, а так как третий вал 12 механически связан со вторым колеблющимся зеркалом 11, то и колебания второго колеблющегося зеркала 11 и повернутого по азимуту первого колеблющегося зеркала 15 осуществляются синхронно. С колеблющихся зеркал 11 и 15, осуществляющих развертку по кадру, лазерные лучи поступают соответственно на вращающиеся призмы 7 и 8, осуществляющие развертку лазерных лучей по строкам. Вращение призм 7 и 8 осуществляется соответственно с помощью первых приводов 3 и 4, причем с помощью первого сельсина-датчика 1 и первого сельсина-приемника 2 обеспечивается синхронное вращение приводов 4 и 3. Количество кадров в секунду зависит от соответствующей скорости вращения первого вала 18, механически связанного с третьим приводом 19. Например, при 5-ти кадрах в 1 с скорость вращения первого вала 18 должна составлять 300 об/мин.
Таким образом осуществляется формирование двух оптико-механических лазерных разверток по кадру и строкам, двигающихся синхронно и разнесенных друг относительно друга на базовое расстояние, которое может составлять, например, 10 м. С приводом 4 также жестко связан датчик азимута 5, который по мере вращения привода 4 выдает коды азимутов, соответствующих положению лазерного луча в каждый момент времени, и работает он аналогично датчику азимутальных меток, используемому в радиолокации при преобразовании вращения привода антенны в коды азимутов. Как показано на фиг.3, расстояние между лучами, находящимися на разных азимутальных направлениях АБ, будут разные, т. е. EF≠AB, т.е. по мере сканирования эти расстояния будут постоянно плавно меняться и каждому азимутальному направлению будет соответствовать свое расстояние (база), т.е. в данном случае мы имеем устройство с переменной базой.
Значение азимутов с датчика 5 поступает в индикатор 9 для отображения и в постоянное запоминающее устройство 6, где каждому азимутальному положению, соответствующему определенной базе, будет соответствовать определенная поправка, складываемая в сумматоре с углубленным значением дальности, поступающим с измерительного устройства 25, и сумма поступает в индикатор 9 для отображения дальности. Индикатор 9 аналогичен индикатору, используемому в радиолокаторе кругового обзора, где на один вход подается азимут, а на другой - дальность. Такой индикатор, например, используется в радиолокаторе, работающем совместно с ЭВМ, где на входы его поступают соответственно информации об азимуте и дальности в цифровом коде.
Измерительное устройство 25 осуществляет определение временного рассогласования между серединами двух видеосигналов, поступающих соответственно с приемников излучения 20 и 21. Временное рассогласование между двумя сигналами благодаря базе будет иметь разное значение на разных дальностях и при одной и той же дальности иметь разное значение на разных направлениях. Работа измерительного устройства 25 аналогична измерителю дальности, определяющему временное рассогласование между синхроимпульсом передатчика и отраженным сигналом. Лазерный луч 31, отразившийся от колеблющегося зеркала 30 поступает на вращающуюся призму 35, от которой также отраженная световая энергия 32, отразившись от колеблющегося зеркала 30, через фокусирующую линзу 33 поступает на чувствительную площадку фотоприемника 34. Регулируя фокусное расстояние путем перемещения фотоприемника 34, добиваются необходимого угла поля зрения лазерного приемника. На выходе же сумматора 10 информация будет зависеть только от дальности, но не от азимута. Приемники излучения 20 и 21 принимают отраженную световую энергию соответственно со второго колеблющегося зеркала 11 и первого колеблющегося зеркала 15, куда она поступает соответственно с вращающихся призм 7 и 8. Так как в процессе ускоренного сканирования за время прихода отраженных от объектов световых сигналов лазерные лучи повернутся на некоторый угол, угол поля зрения приемников излучения 20 и 21 должен превышать ширину лазерного луча на величину, не превышающую угол α для обеспечения раздельного приема отраженных сигналов, что и осуществляется благодаря расходимости лазерных лучей. Юстировка осуществляется путем сравнения заранее известной дальности до контрольного объекта и измеренной дальности до этого объекта и определения систематической поправки, которая учитывается при выдаче информации с постоянного запоминающего устройства 6. Предлагаемое устройство может быть использовано в системах, где необходимо своевременно определить дальность и направление на объект, который может появиться в ожидаемой зоне сканирования, которая может составлять 120о. Это делает эффективным его использование в системах предупреждения столкновений в бортовых условиях и в системах управления воздушным и космическим движением. При этом за счет увеличения расходимости двух лучей увеличится временное рассогласование между двумя сигналами, хотя отличие этих временных рассогласований на разных дальностях не зависит от величины расходимости двух лучей, а зависит только от величины базы, т. е. при увеличении базового расстояния увеличится и это отличие.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097789C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097788C1 |
| ЛОКАЦИОННОЕ УСТРОЙСТВО | 1992 |
|
RU2032918C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2010264C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2094818C1 |
| РАДИОЛОКАТОР | 1994 |
|
RU2081429C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028644C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| Оптический локатор | 1989 |
|
SU1751709A1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
Изобретение относится к оптической локации. В оптический локатор, содержащий последовательно установленные и оптически сопряженные непрерывный лазерный передатчик 24, полупрозрачное зеркало 22, отражатель 23, первое колеблющееся зеркало 15 и первый приемник излучения 21, а также последовательно соединенные систему обработки сигнала, сумматор 10 и индикатор 9, введены второе колеблющееся зеркало 11, первая и вторая вращающиеся призмы 7 и 8, снабженные первым и вторым приводами 3 и 4, первый и второй сельсин-датчики 1 и 14, первый и второй сельсин-приемники 2 и 13, датчик азимута 5, постоянное запоминающее устройство 6, последовательно установленные и механически соединенные третий привод 19, первый вал 18, кулачковый механизм 17 и второй вал 16, а также третий вал 12. 4 ил.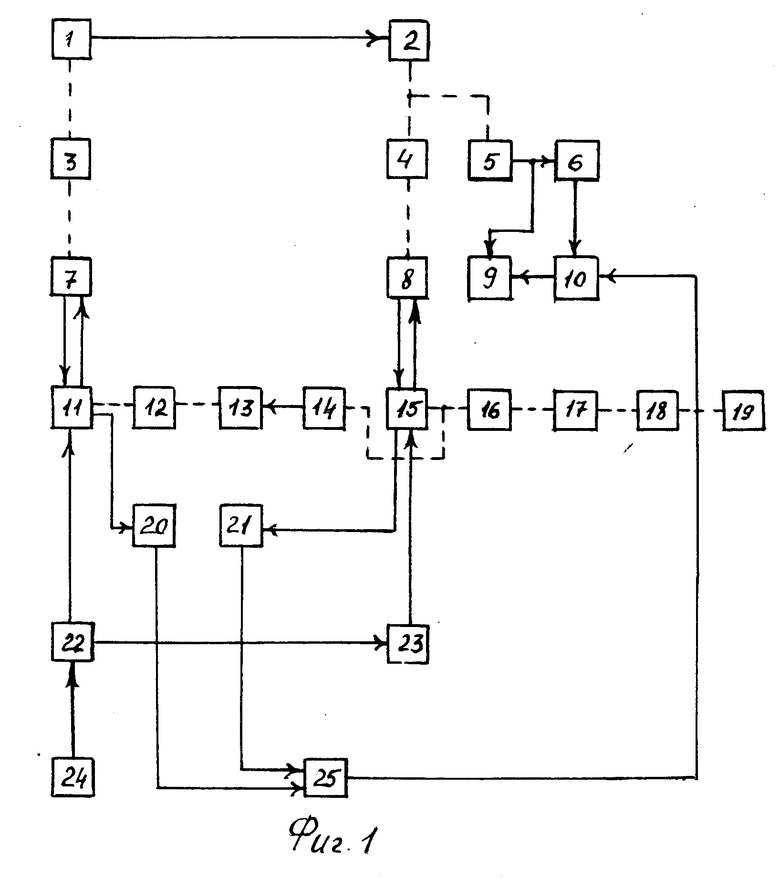
ОПТИЧЕСКИЙ ЛОКАТОР, содержащий последовательно установленные и оптически сопряженные непрерывный лазерный передатчик, полупрозрачное зеркало, отражатель, первое колеблющееся зеркало и первый приемник излучения, последовательно соединенные систему обработки сигнала, сумматор и индикатор, отличающийся тем, что введены второе колеблющееся зеркало, первая и вторая вращающиеся призмы, снабженные соответственно первым и вторым приводами, первый и второй сельсин-датчик, первый и второй сельсин-приемник, датчик азимута, постоянное запоминающее устройство, последовательно установленные и механически соединенные третий привод, первый вал, кулачковый механизм и второй вал, а также третий вал, при этом система обработки сигнала выполнена в виде устройства определения дальности, первое и второе колеблющиеся зеркала оптически сопряжены соответственно с первой и второй вращающимися призмами, второй вал механически соединен с первым колеблющимся зеркалом и вторым сельсин-датчиком, выход которого соединен с третьим валом, который механически соединен с вторым колеблющимся зеркалом, второй привод механически соединен с входом первого сельсин-датчика, выход которого соединен с входом первого сельсин-приемника, выход которого механически соединен с первым приводом и с датчиком азимута, выход которого соединен с вторым входом индикатора и входом постоянного запоминающего устройства, выход которого соединен с вторым входом сумматора, второй оптический выход полупрозрачного зеркала оптически сопряжен с вторым колеблющимся зеркалом, которое также сопряжено с входом второго приемника излучения, выход которого соединен с вторым входом устройства определения дальности.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Белов Е.Ф., Губанов Б.С | |||
| и др | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
