Изобретение относится к области оптической техники и может быть использовано в системах управления воздушным движением. Известен оптический локатор (Протопопов В.В. и Устинов Н.Д. Инфракрасные лазерные локационные системы. М. Воениздат. 1987 г, с. 96 99). Он содержит непрерывный лазерный передатчик, оптически сопряженный с пространством предметов посредством оптической системы и оптико-механического сканирующего устройства. Он также содержит опорный канал, выход которого соединен с первым входом блока определения дальности и с индикатором. Второй вход блока определения дальности соединен с выходом лазерного приемника.
Недостатком оптического локатора является большое время определения дальности, связанное с затратами времени на обзор пространства.
Известен оптический локатор (патент СССР N 2002278, 1993 г.). В нем луч от непрерывного лазерного передатчика проходит через отверстие отражательного зеркала с отверстием и поступает в оптико-механическое сканирующее устройство, где осуществляется развертка его по азимуту к углу места. Она может осуществляться с помощью первого и второго приводов, производящих вращение оптических элементов.
Инфракрасная энергия, излучаемая самим объектом, пройдя через оптико-механическое сканирующее устройство, отражается от отражательного зеркала с отверстием и поступает через положительную линзу в инфракрасный приемник, который выдает сигнал в блок определения дальности о начале отсчета дальности. После же отражения лазерного луча от объекта, излучающего инфракрасную энергию, отраженная световая энергия может пройти снова через оптико-механическое сканирующее устройство, развертка которого, за время запаздывания отраженного от объекта сигнала, будет уже повернута, попадая далее в лазерный приемник. Величина угла поля зрения лазерного приемника зависит от того, на какую угловую величину повернется развертка лазера за время прихода сигнала от максимально удаленной цели. Таким образом, этот угол поля зрения зависит и от скорости сканирования.
Для увеличения дальности обнаружения и чувствительности лазерный приемник может быть и многоканальным. Лазерный приемник выдает сигнал в блок определения дальности о конце отсчета дальности. Сигналы с инфракрасного и лазерного приемников поступают в индикатор. Дальность определяется также и автоматически с помощью блока определения дальности, что увеличивает точность. Он автоматически определяет время между началом и концом отсчета дальности, которое будет пропорционально дальности. Однако, оптический локатор не может определить дальность до объекта, не излучающего инфракрасную энергию.
С помощью предлагаемого устройства осуществляется без уменьшения времени обзора определение дальности до объекта, не излучающего инфракрасную энергию.
Достигается это введением телевизионного датчика, угол поля зрения которого равен зоне сканирования, а также введением селектора по длительности и амплитуде, датчиков начала строки и кадра, дополнительного блока определения дальности, при этом датчики начала кадра и начала строки жестко связаны соответственно с первым и вторым приводом и имеют выходы соответственно соединенные с первым и вторым входом телевизионного датчика, выход которого через селектор по длительности и амплитуде соединен с третьим входом индикатора и с первым входом дополнительного блока определения дальности, имеющего второй вход, соединенный с выходом лазерного приемника.
На чертеже приняты следующие обозначения: 1 привод; 2 датчик начала кадра; 3 лазерный передатчик; 4 отражательное зеркало с отверстием; 5 - оптико-механическое сканирующее устройство; 6 привод; 7 датчик начала строки; 8 положительная линза; 9 лазерный приемник; 10 индикатор; 11 - телевизионный датчик; 12 инфракрасный приемник; 13 блок определения дальности; 14 дополнительный блок определения дальности; 15 селектор по длительности и амплитуде.
Оптический выход лазерного передатчика 3 через отверстие отражательного зеркала с отверстием 4 соединен с оптическим входом оптико-механического сканирующего устройства 5, имеющего два оптических выхода, соединенных соответственно с оптическим входом лазерного приемника 9 и с оптическим входом отражательного зеркала с отверстием 4, оптический выход которого через положительную линзу 8 соединен с оптическим входом инфракрасного приемника 12, выход которого соединен с первым входом блока определения дальности 13, имеющего второй вход, соединенный с выходом лазерного приемника 9, соединенный также с первым входом дополнительного блока определения дальности 14, второй вход которого соединен с третьим входом индикатора 10 и через селектор по длительности и амплитуде 15, соединен с выходом телевизионного датчика 11, имеющего первый и второй входы, соответственно соединенные с выходом датчика начала кадра 2 и с выходом датчика начала строки 7, соответственно жестко связанных с приводом 1 и с приводом 6, имеющих жесткую связь с оптико-механическим сканирующим устройством 5, к тому же выход лазерного приемника 9 соединен со вторым входом индикатора 10.
Работа устройства осуществляется следующим образом.
Работа общих узлов устройства и прототипа не отличаются друг от друга. Луч от непрерывного лазерного передатчика 3 проходит через отверстие отражательного зеркала с отверстием 4 и поступает в оптико-механическое сканирующее устройство 5, где осуществляется развертка этого луча по азимуту и углу места. В частности, развертка по азимуту осуществляется с помощью привода 6, а по углу места с помощью привода 1, которые вращают соответствующие оптические элементы оптико-механического сканирующего устройства 5. Инфракрасная энергия, излучаемая самим объектом, пройдя через оптико-механическое сканирующее устройство 5, отражается от отражательного зеркала с отверстием 4 и поступает через положительную линзу 8 в инфракрасный приемник 12, который выдает сигнал в индикатор 10 и в блок определения дальности 15 о начале отсчета дальности. При этом угол поля зрения лазерного передатчика 3 и инфракрасного приемника 12 равны и одинаково направлены. После же отражения лазерного луча от объекта, излучающего инфракрасную энергию, отраженная световая энергия, перед тем как попасть в лазерный приемник, проходит снова через оптико-механическое сканирующее устройство 5.
Развертка этого устройства за время запаздывания отраженного от объекта сигнала будет повернута. Величина угла поля зрения лазерного приемника 9 зависит от того, на какую угловую величину повернется развертка лазера за время прихода сигнала от максимально удаленной цели и может составить, например, 10o. Лазерный приемник 9 для увеличения дальности обнаружения и чувствительности может быть и многоканальным. Лазерный приемник выдает сигнал в индикатор 10 и в блок определения дальности 13 о конце отсчета дальности. Сигналы с инфракрасного и лазерного приемников поступают в индикатор 10 для отображения. Блок определения дальности 13 определяет дальность автоматически, так же, как и преобразователь дальности по временному рассогласованию между началом и концом отсчета дальности, которое будет пропорционально дальности, и по своему структурному построению он аналогичен блоку определения дальности, изложенному в прототипе.
В устройство вводится телевизионный датчик 11, угол поля зрения которого равен и совпадает по направлению с зоной сканирования оптико-механического сканирующего устройства 5.
Обеспечивается это следующим образом. Датчик начала кадра 2 и датчик начала строки 7 выдает синхроимпульсы начала кадровой и строчной разверток в телевизионный датчик 11. Эти датчики жестко связаны соответственно с приводом 1 и с приводом 6. Таким образом, осуществляется синхронное движение разверток оптико-механического сканирующего устройства 5 и телевизионного датчика 11. Телевизионный датчик 11 осуществляет преобразование световой энергии от объектов в электрические сигналы.
В селекторе по длительности и амплитуде 15 выделяется сигнал относительно окружающих его уровней, который по своим характеристикам соответствует ожидаемому объекту и который поступает на третий вход индикатора 10. Момент же прихода этого сигнала в дополнительный блок определения дальности 14 является началом отсчета дальности. Концом же отсчета дальности является момент прихода сигнала на второй вход этого блока с лазерного приемника 9. Структурное построение дополнительного блока определения дальности 14 аналогично блоку определения дальности 13.
Устройство без уменьшения времени обзора может быть использовано для поиска и многоцелевого сопровождения воздушных объектов. Увеличивается количество обнаруженных целей. Оно может работать и на проходе. При этом, в отличие от импульсных оптических локаторов, время облучения объектов не зависит от частоты излучения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097789C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2010264C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028645C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2094818C1 |
| ЛОКАЦИОННОЕ УСТРОЙСТВО | 1992 |
|
RU2032918C1 |
| УСТРОЙСТВО ПОИСКА ОБЪЕКТОВ | 1992 |
|
RU2048687C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1994 |
|
RU2081440C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1991 |
|
RU2013025C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028644C1 |
| Оптический локатор | 1989 |
|
SU1751709A1 |
С помощью предлагаемого оптического локатора без уменьшения времени обзора определяется дальность до объекта, не излучающего инфракрасную энергию, благодаря введению телевизионного датчика с углом поля зрения, равным углу поля зрения оптико-механического сканирующего устройства, а также вводится селектор по длительности и амплитуде, датчик начала кадра, датчик начала строки и дополнительный блок определения дальности, при этом датчик начала кадра и датчик начала строки жестко связаны соответственно с первым и вторым приводами и имеют выходы, соответственно соединенные с первым и вторым входом телевизионного датчика, выход которого через селектор по длительности и амплитуде соединен третьим входом индикатора, с первым входом дополнительного блока определения дальности, имеющего второй вход, соединенный с выходом лазерного приемника. 1 ил.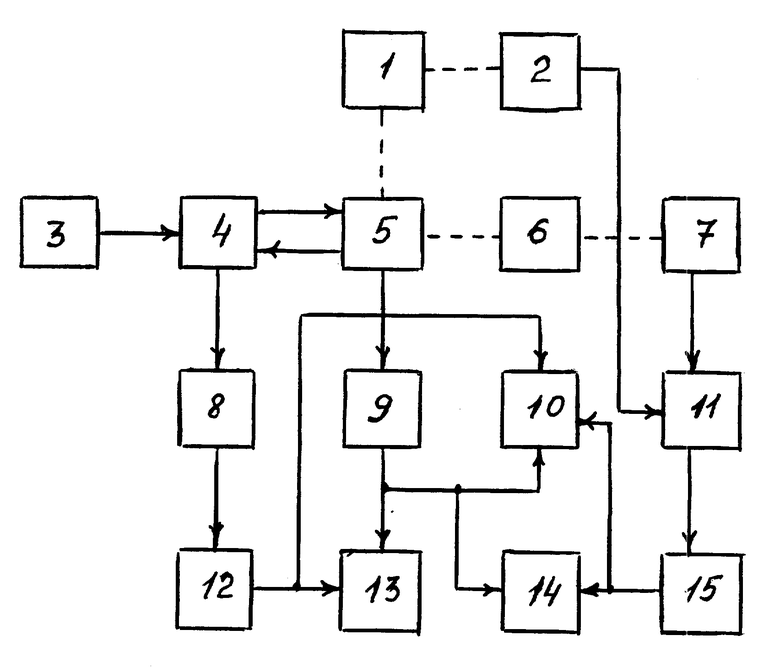
Оптический локатор, состоящий из лазерного передатчика, лазерного приемника, блока определения дальности, отражательного зеркала с отверстием, оптико-механического сканирующего устройства и жестко связанных с ним приводов, а также состоящий из положительной линзы, связанной по оптическому входу через отражательное зеркало с отверстием с первым оптическим выходом оптико-механического сканирующего устройства и связанной по оптическому выходу с оптическим входом инфракрасного приемника, выход которого соединен с первым входом блока определения дальности и первым входом индикатора, имеющего второй вход, соединенный с выходом лазерного приемника, соединенным также с входом блока определения дальности, и имеющего оптический вход, соединенный с вторым оптическим выходом оптико-механического сканирующего устройства, упомянутый первый оптический вход которого через отражательное зеркало с отверстием соединен с оптическим выходом лазерного передатчика, отличающийся тем, что вводится телевизионный датчик с углом поля зрения, равным углу поля зрения оптико-механического сканирующего устройства, а также вводится селектор по длительности и амплитуде, датчик начала кадра, датчик начала строки и дополнительный блок определения дальности, при этом датчик начала кадра и датчик начала строки жестко связаны соответственно с первым и вторым приводами и имеют выходы, соответственно соединенные с первым и вторым входами телевизионного датчика, выход которого через селектор по длительности и амплитуде соединен с третьим входом индикатора, с первым входом дополнительного блока определения дальности, имеющего второй вход, соединенный с выходом лазерного приемника.
| RU, патент, 2002278, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
