Изобретение относится к оптической технике и может быть использовано в системах предупреждения столкновений, в навигации и обзорно-поисковых системах.
Известен оптический локатор [1] в котором осуществляется сканирование непрерывного луча в прямом и обратном направлении.
Ввиду наличия времени задержки отраженного сигнала, достаточного для определения дальности, необходимо увеличить угол поля зрения приемника, что уменьшает дальность обнаружения.
Известен оптический локатор [2] в котором непрерывная световая энергия, формируемая в непрерывном лазерном передатчике 6, в виде двух разнесенных по азимуту и углу места лучей, поступает в оптико-механическое сканирующее устройство, которое осуществляет сканирование луча по азимуту и углу места в секторе, например, 60o х 10o. Отраженная световая энергия поступает с оптико-механического сканирующего устройства через два фокусирующих объектива (один из которых повернут по азимуту и углу места) на чувствительные площадки первого и второго фотоприемников, работающих в ожидаемом спектре и преобразующих световую энергию в электрические сигналы, которые с выходов этих фотоприемников поступают через блоки определения длительности сигналов в вычитатель следующих друг за другом кодов.
Информация с выхода вычитателя характеризует угломестное положение объекта. Далее для каждого угломестного положения определяется дальность, используя информацию о длительности сигнала, зависящую от времени задержки отраженного сигнала, то есть от дальности. Информация дальности отображается на индикаторе. Однако локатор имеет низкую точность определения дальности, так как точность определения дальности зависит от размеров объекта: чем объект протяженней, тем точность меньше.
С помощью предлагаемого оптического локатора увеличивается точность определения дальности.
Достигается это тем, что между повернутым фокусирующим объективом и первым фотоприемником и фокусирующим объективом и вторым фотоприемником вводятся соответствующие первая и вторая усеченные диафрагмы, а также вводится блок определения дальности, состоящий из двух вычитателей, делителя на два, панели ввода двух констант и умножителя. При этом выход первого вычитателя через вход блока определения дальности соединен с первым входом второго вычитателя, второй вход, который соединен с первым выходом панели ввода двух констант, а выход через делитель на два соединен с первым входом третьего вычитателя, имеющего второй вход, соединенный с первым выходом вышеупомянутой панели ввода двух констант, и имеющего выход, соединенный с первым входом умножителя, второй вход которого соединен со вторым входом панели ввода двух констант с входом индикатора.
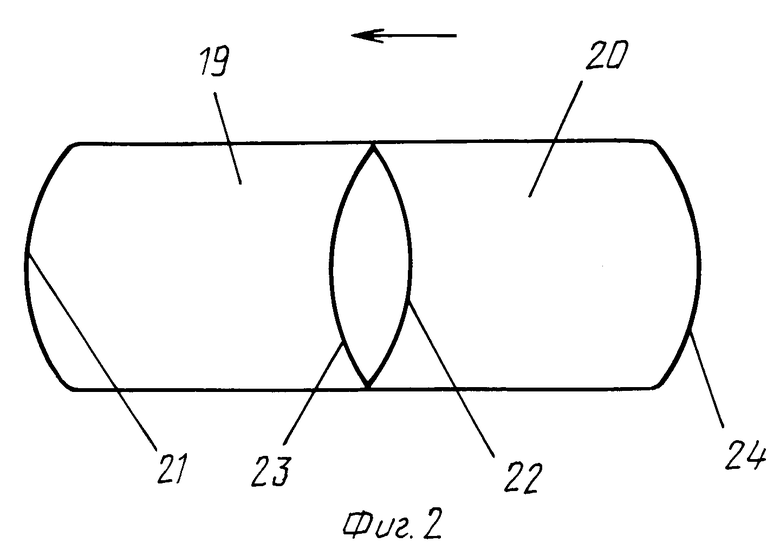
На фиг. 1 и 2 изображен предлагаемый оптический локатор.
Предлагаемый оптический локатор содержит оптико-механическое сканирующее устройство 1, фокусирующий объектив 2, повернутый фокусирующий объектив 3, усеченные диафрагмы 4 и 5, непрерывный лазерный передатчик 6, фотоприемники 7 и 8, блоки преобразования длительности сигнала в код 9 и 10, вычитатель 11, блок определения дальности 12, вычитатель 13, делитель на два 14, панель ввода двух констант 15, вычитатель 16, умножитель 17 и индикатор 18.
При этом непрерывный лазерный передатчик 6 имеет оптическую связь по выходу с оптико-механическим сканирующим устройством 1, оптический выход которого связан через фокусирующий объектив 2, усеченную диафрагму 4 с оптическим входом фотоприемника 7 и через повернутый фокусирующий объектив 3, усеченную диафрагму 5 с оптическим входом фотоприемника 8, а выходы фотоприемников 7 и 8 соединены через соответствующие блоки преобразования длительности сигнала в код 9 и 10 с первым и вторым входами вычитателя 11, имеющего выход, соединенный через блок определения дальности 12 с первым входом вычитателя 13, второй вход которого соединен с первым входом панели ввода двух констант 15, а выход через делитель на два 14 соединены с первым входом вычитателя 16, имеющего второй вход, соединенный с первым выходом вышеупомянутой панели двух констант, и имеющего выход, соединенный с первым входом умножителя 17, второй вход которого соединен со вторым выходом панели ввода двух констант 15, и выход, соединенный через выход блока определения дальности 12 с входом индикатора 17.
Устройство работает следующим образом.
Непрерывный лазерный передатчик формирует непрерывный или квазенепрерывный луч, который поступает в оптико-механическое сканирующее устройство 1, осуществляющее сканирование развертки этого луча по азимуту и углу места. Отраженный от объекта световой сигнал с выхода этого оптико-механического устройства поступает в фокусирующий объектив 2 и в повернутый фокусирующий объектив 3.
Благодаря повороту фокусирующего объектива 3 в направлении, противоположном направлению сканирования, углы поля зрения, ограниченные диафрагмами 4 и 5, будут иметь вид, показанный на фиг. 2, где 19 угол поля зрения после диафрагмы 4, 20 угол поля зрения после диафрагмы 5.
Как видно из фиг. 2, угол поля зрения, ограниченный диафрагмой 5, повернут вправо. Стрелкой показано направление сканирования. Причем дуги 21 и 22 совмещены с краями лазерного луча. Они также ограничивают края диафрагмы: дуга 21 левый край диафрагмы 4, а дуга 22 левый край диафрагмы 5. Дуги же 23 и 24 ограничивают правые края диафрагмы 4 и 5.
При скорости сканирования по азимуту соответствующее, например, 60 об/мин луча шириной 10 мин, ввиду задержки отраженного от объектива сигнала, зависящей от дальности, часть световой энергии пройдет через диафрагму 20. Чем больше дальность, тем больше количество световой энергии пройдет через эту диафрагму и меньшее количество этой энергии пройдет через диафрагму 19. Общее количество энергии, проходящей через диафрагмы 19 и 20, будет зависеть только от протяженности объекта. Далее световая энергия поступает на соответствующие фотоприемники 7 и 8, где преобразуется в электрические сигналы, которые последовательно друг за другом поступают на соответствующие блоки преобразования длительности сигнала в коды 9 и 10. С выходов преобразователей 9 и 10 величины кодов поступают в вычитатель 11. Разность этих кодов будет зависеть от дальности, то есть характеризует дальность. Эта разность поступает в блок определения дальности 12.
Пример. Поле зрения оптико-механического сканирующего устройства 1 составляет 60o x 10o, а угол поля зрения лазерного передатчика 10 мин, время одной строки 170 мс. Тогда длительность сигналов от объекта, находящегося на расстояниях 60, 30 и 5 км, на выходе фотоприемника 7 будет составлять соответственно 70, 270 и 427 мкс. При времени перемещения лазерного луча на величину угла поля зрения диафрагм 4, равного 470 мкс, длительность сигнала на выходе фотоприемника 8 будет составлять соответственно 400, 200 и 33 мкс, а разности на выходе вычитателя 11 будут соответственно равны 330, (-70) и (-394) мкс.
Действительно, если принять значение 330 (-70) (-394) мкс за a, b, c, а 470 мка за К, то величину прямо пропорциональную дальности можно определить по формулам
Д1 K (К a)/2; (1)
Д2 K (К b)/2; (2)
Д3 K (К c)/2; (3)
В данном случае Д1 400, Д2 200 и Д3 33 мкс.
Истинная же дальность
Дист1 Д1 • K1 (4); Дист2 Д2 • K1 (5) и Дист3 Д3 • K1 (5),
где K1 константа для перевода в дальность, если принять
K1=150, то
Дист1 400 • 150 60000 м 60 км
Дист2 200 • 150 30000 м 30 км
Дист3 30 • 150 5000 м 5 км,
что совпадает с первоначальными данными формулы (1 6).
Дист рассчитывается в блоке определения дальности 12, в частности: значения (K a), (K b), и (K c) в вычитателе 13; (К а)/2; (К b)/2 и (К с)/2 в делителе на два 14, (K (К а)/2); (K (К b)/2); (K (К - c)/2) вычитателе 16, а значение Д1 • K1; Д2 • K1 и Д3 • K1 в умножителе 17. Если принять значения a, b, c за t, то общий вид формулы, определяемой в блоке определения дальности 12, будет иметь вид
Дист K1 (K (К t)/2) (7)
Рассчитанное значение дальности поступает в индикатор 18 для отображения. Предлагаемое устройство может быть использовано в системах управления воздушным и космическим движением в системах поиска надводных, наземных целей, в системах предупреждения столкновений, при этом размер объектов не влияет на точность определения дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028645C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097788C1 |
| ЛОКАЦИОННОЕ УСТРОЙСТВО | 1992 |
|
RU2032918C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028644C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ОБЪЕКТОВ | 1998 |
|
RU2164004C2 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 1995 |
|
RU2097787C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
| ДАЛЬНОМЕР | 1994 |
|
RU2081438C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097789C1 |
| ДАЛЬНОМЕР | 1994 |
|
RU2084926C1 |
Оптический локатор увеличивает точность определения благодаря тому, что между повернутым фокусирующим объективом и первым фотоприемником и фокусирующим объективом и вторым фотоприемником вводятся соответствующие первая и вторая усеченные диафрагмы, а также вводится блок определения дальности, состоящий из двух вычитателей, делителя на два, панели ввода двух констант и умножителя, при этом выход первого вычитателя через блок определения дальности соединен с первым входом второго вычитателя, второй вход которого соединен с первым выходом панели ввода двух констант, а выход через делитель на два соединен с первым входом третьего вычитателя, имеющего второй вход, соединенный с первым выходом вышеупомянутой панели ввода двух констант, и имеющего выход, соединенный с первым входом умножителя, второй вход которого соединен со вторым выходом панели ввода двух констант, и выход, соединенный через выход блока определения дальности, - с входом индикатора. 2 ил.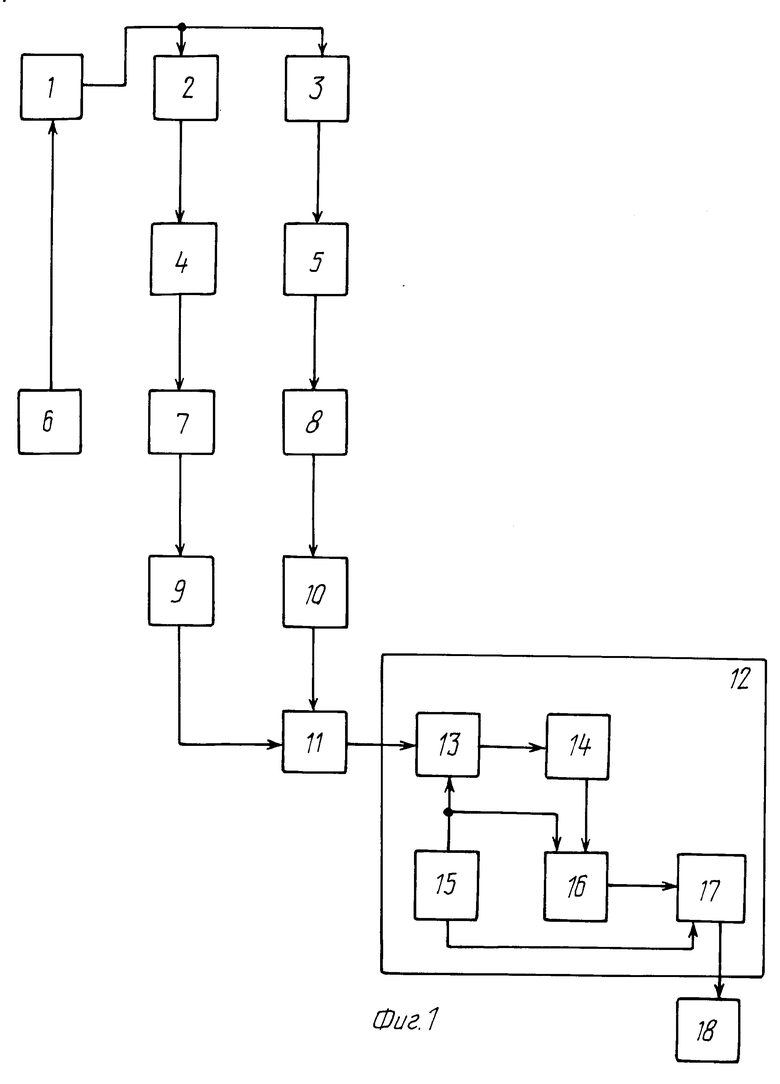
Оптический локатор, состоящий из оптико-механического сканирующего устройства, непрерывного лазерного передатчика, повернутого фокусирующего устройства, фокусирующего устройства, двух фотоприемников, двух блоков преобразования длительности сигнала в код, вычитателя и индикатора дальности, при этом оптический выход непрерывного лазерного передатчика соединен с оптическим входом оптико-механического сканирующего устройства, имеющего оптический выход, соединенный с оптическими входами повернутого фокусирующего устройства и фокусирующего устройства, оптические выходы которых соответственно соединены с оптическими входами первого и второго фотоприемников, выходы которых соответственно через первый и второй блоки преобразования длительности сигнала в код соединены с первым и вторым входами вычитателя, отличающийся тем, что между повернутым фокусирующим устройством и первым фотоприемником и фокусирующим устройством и вторым фотоприемником введены соответствующие первая и вторая усеченные диафрагмы, а также введен блок определения дальности, состоящий из двух вычитателей, делителя на два, панели ввода двух констант и умножителя, при этом выход первого вычитателя через вход блока определения дальности соединен с первым входом второго вычитателя, второй вход которого соединен с первым выходом панели ввода двух констант, а выход через делитель на два соединен с первым входом третьего вычитателя, имеющего второй вход, соединенный с первым выходом вышеупомянутой панели ввода двух констант, и выход, соединенный с первым входом умножителя, второй вход которого соединен с вторым выходом панели ввода двух констант, а выход соединен через выход блока определения дальности с входом индикатора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU, патент, 2028644, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU, патент, 2002279, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
