Изобретение относится к электрогидроавтоматике и может быть использовано в высоконадежных системах управления рулевыми поверхностями летательных аппаратов, в силовых приводах промышленных роботов и т.д.
Известны автономные электрогидравлические рулевые приводы с объемным регулированием, имеющие собственную энергосистему (см. патент США N 3902318. кл. 60-388, опублик. 1875; Безинг В. Лауде Ю. Автономные сервоприводы самолетных систем управления с объемным регулированием. "Integrated Actuator Package-IAP" Olhydraulik und Pneumatic, 1980, N 4; патент США N 3928968, кл. 60-403, опублик. 1876).
Наиболее близким по технической сущности и достигаемым результатам является выбранный в качестве прототипа автономный электрогидравлический прибор, описанный в патенте США N 3902318, Известное устройство содержит приводной электродвигатель, выходной вал которого кинематически связан с ротором входным валом регулируемого аксиально-поршневого насоса (АПН). В свою очередь, наклонная шайба АПН кинематически связана с приводом управления углом ее наклона, подключенным через сумматор к источнику входного командного сигнала. В состав устройства также входит исполнительный цилиндр, полости которого соединены с выходными всасывающей и нагнетающей линиями АПН.
Привод управления углом наклона шайбы включает вспомогательный насос, приводимый от электродвигателя, сервомотор, регулирующий производительность основного насоса и питающийся от вспомогательного насоса, а также электрогидравлический сервоклапан, регулирующий подачу жидкости к сервомотору. Помимо этого известный привод содержит замкнутый резервуар с изменяющимся объемом (гидробак), управляемые цилиндрические золотниковые клапаны ограничения мощности, предохранительные клапаны и датчик положения штока исполнительного гидроцилиндра, подключенный на второй вход сумматора. Существенными недостатками известного устройства являются его сложность, недостаточная надежность и низкая точность регулирования угла наклона шайбы. Это обусловлено использованием для изменения производительности АПН гидросигнала, поступающего от сервомотора, питающегося от вспомогательного насоса. Наличие сервомотора предопределяет в этом случае необходимость использования электрогидравлического сервоклапана, регулирующего подачу жидкости к нему, а также управляемых цилиндрических золотниковых предохранительных клапанов, требующих высокой точности изготовления для получения заданных радиальных зазоров.
Необходимость во вспомогательном насосе в известном приводе приводит к уменьшению КПД, повышенным тепловыделениям, снижающим рабочие характеристики устройства.
Регулирование высокого давления в АПН с помощью управляемых золотниковых клапанов, установленных в гидролиниях, связывающих сервоклапан и гидроцилиндр сервомотора, поршни которых изменяют положение наклонной шайбы АПН, требует большого количества гидролиний, что снижает надежность работы привода, усложняет устройство, повышает его массу и увеличивает затраты на изготовление.
Целью изобретения являются упрощение конструкции, повышение надежности и точности регулирования.
Поставленная цель достигается тем, что в электрогидравлическом следящем приводе, содержащем соединенные гидравлически реверсивный регулируемый насос и исполнительный гидроцилиндр с датчиком положения его штока, подключенным через суммирующее устройство к электромеханическому преобразователю механизма управления углом поворота наклонной шайбы насоса, датчик угла поворота последней, связанный с суммирующим устройством, соединенным с задатчиком, а также бак и клапаны подпитки, с целью упрощения конструкции и повышения точности выходной вал ротора электромеханического преобразователя выполнен заодно с наклонной шайбой насоса, а суммирующее устройство - в виде двух последовательно связанных сумматоров, ограничителя-формирователя сигнала рассогласования по положению и усилителя, причем первый сумматор соединен входами с задатчиком и датчиком положения штока гидроцилиндра, второй сумматор соединен входами с датчиком угла поворота наклонной шайбы и через указанный ограничитель-формирователь сигнала с выходом первого сумматора, а выход второго сумматора через усилитель связан с электромеханическим преобразователем.
Выполнение привода управления наклоном шайбы в виде электромеханического преобразователя (ЭМП), ротор которого кинематически жестко связан с шайбой, обеспечивает прямое механическое регулирование ее положения без использования электрогидравлических и гидравлических механизмов, создающих управляющий гидравлический сигнал для изменения наклона шайбы и открывания клапанов, что упрощает устройство.
Выполнение привода управления наклоном шайбы в виде ЭВМ позволяет контролировать угол наклона шайбы с помощью контроля угла поворота ротора, вал которого выполнен как одно целое с шайбой, что упрощает устройство и повышает точность регулирования благодаря более точному сигналу с датчика и возможности непосредственного прямого управления шайбой. Шайба и вал ротора ЭМП выполняются как одно целое для исключения люфтов в жесткой кинематической связи ротора ЭМП и шайбы.
Наличие второго сумматора, на который подаются сигналы, зависящие от сигнала задатчика и угла наклона шайбы, позволяет обеспечить простое формирование точного сигнала управления на силовой обмотке ЭМП. При использовании ЭМП для управления наклоном шайбы предохранительные клапаны устанавливаются в выходных линиях АПН, связанных со сливной полостью АПН и гидробаком. При этом клапаны выполняются неуправляемыми, например, конической формы, что упрощает устройство.
Указанный первичный технический эффект в патентной и научно-технической литературе не выявлен, что указывает на соответствие заявляемого устройства критериям "новизна" и "существенные отличия".
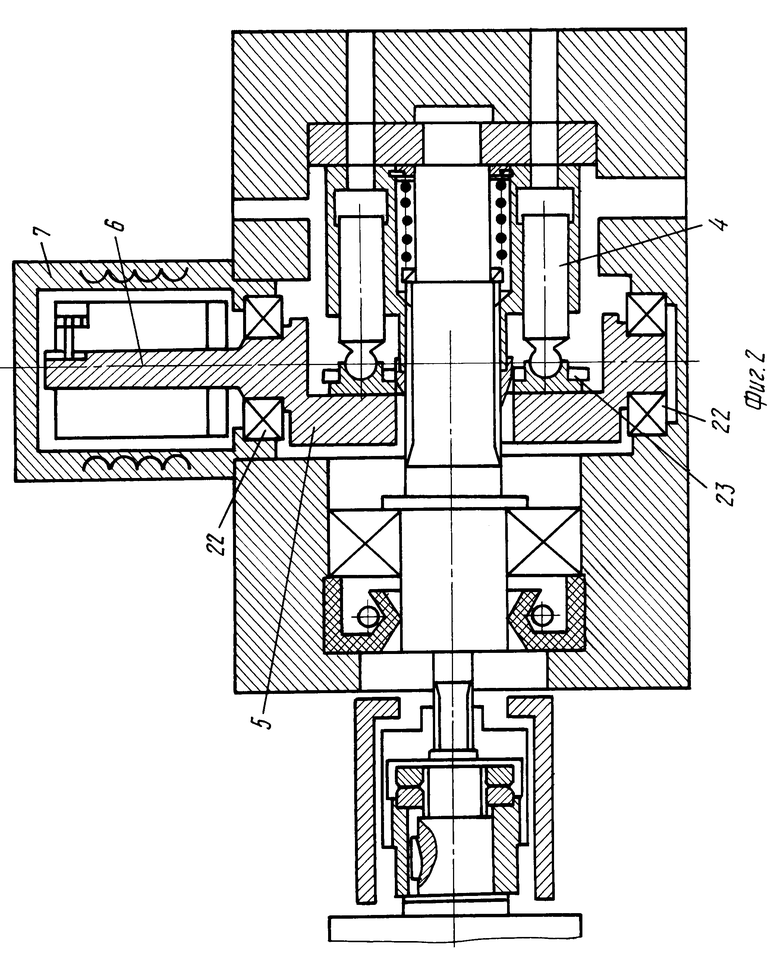
На фиг. 1 представлена схема устройства; на фиг. 2 - укрупненный вид АПН с ЭМП.
Автономный электрогидравлический рулевой привод содержит приводной электродвигатель 1, выходной вал 2 которого кинематически жестко связан с входным валом 3 реверсивного регулируемого насоса 4. Наклонная шайба 5 насоса для управления ее наклоном жестко связана с валом 6 ротора электромеханического преобразователя (ЭМП) 7. В качестве датчика контроля угла наклона шайбы 5 используется датчик 8 поворота вала 6 ротора ЭМП 7 известной конструкции. Суммирующее устройство включает второй сумматор 9, ограничитель-формирователь 10 и первый сумматор 11. Выход сумматора 9 соединен с усилителем 12 мощности, к которому подключена силовая обмотка 13 ЭМП 7. На один вход сумматора 11 задатчиком подается входной (командный) сигнал Uвх. На другой вход сумматора 11 подан сигнал с выхода датчика 14 положения штока исполнительного гидроцилиндра 15, который преобразован в постоянное напряжение с помощью преобразователя 16. В состав привода также входит гидравлический бак-компенсатор 17, который связан гидролиниями, где установлены клапаны 18 подпитки, с выходными линиями насоса 4, соединенными с полостями исполнительного гидроцилиндра 15. Полости гидроцилиндра 15 гидролиниями, где установлены предохранительные клапаны 19, соединены со сливной полостью насоса, где установлена шайба 5. Клапаны 19 выполнены конической формы. Все узлы привода скомпонованы в одном корпусе 20. Полость насоса 4 и бак-компенсатор 17, а также полости исполнительного гидроцилиндра 15 заполнены маслом. Вал 2 электродвигателя 1 уплотняется в корпусе 20 с помощью уплотнения 21. Шайба 5 установлена на опорах 22. Наклонная шайба 5 выполнена в форме короба как одно целое с валом 6 ротора ЭМП 7. Вал 3 насоса 4 свободно проходит через отверстия в шайбах 5 и 23 и кинематически жестко связан с блоком цилиндров насоса 4 для передачи вращения его плунжерам. Ограничитель-формирователь 10 ограничивает значение напряжения на выходе сумматора 11. Такое ограничение выполняется для предотвращения постановки ротора ЭМП на механические упоры, так как в этом случае будет иметь место сильный разогрев силовых обмоток. Аналогичный преобразователю 16 преобразователь 25 преобразует переменный сигнал с выхода датчика 8 поворота ротора ЭМП 7 в постоянный, поступающий на один из входов сумматора 9. Полость насоса 4 связана с полостью бака-компенсатора через фильтр 26.
Привод работает следующим образом.
При подаче напряжения питания приводной электродвигатель 1 начинает вращать вал 3 насоса 4. При нулевой управляющей команде Uвх наклонная шайба 5 насоса 4 находится под углом 90о к оси вращения вала 3 насоса 4, плунжеры которого в этом случае не совершают возвратно-поступательного движения и рабочая жидкость не поступает в полости силового гидроцилиндра 15. Шток гидроцилиндра 15 остается на месте. При наличии командного сигнала Uвх на входе сумматора 11 ротор ЭМП 7 поворачивается, одновременно поворачивая шайбу 5 и изменяя угол ее наклона относительно центральной оси насоса 4. Угол поворота вала 6 ротора ЭМП 7 фиксируется датчиком 8, выходной сигнал которого преобразуется в постоянное напряжение блоком 25 и подается на вход сумматора 9, на другой вход которого поступает сигнал, пропорциональный Uвх. При повороте шайбы 5 плунжера насоса 4 начинают линейно перемещаться, подавая рабочую жидкость в одну из полостей цилиндра 15. Шток цилиндра 15 также начинает перемещаться. Сигнал с выхода перемещающегося со штоком датчика 14 преобразуется в постоянное напряжение преобразователем 16 и поступает на другой вход сумматора 11. Одновременно с перемещением штока цилиндра 15 изменение давления жидкости в выходных линиях насоса 4 приведет к открыванию клапана 18 в гидролинии, где давление упало. При этом жидкость из гидробака 17 начинает поступать в одну из полостей исполнительного гидроцилиндра 15. При достижении компенсации входного сигнала Uвх сигналом с выхода датчика положения 14 шток гидроцилиндра остановится, т.к. сигналы рассогласования на выходах первого 11 и второго 9 сумматоров будут равны нулю. При этом давление в выходных гидролиниях насоса 4 восстановится до первоначального и клапан 18 закроется. При изменении полярности Uвх на входе первого сумматора 11 шток исполнительного гидроцилиндра 15 будет двигаться в противоположную сторону.
При появлении на штоке гидроцилиндра противодействующей внешней нагрузки, равной по величине тормозному усилию (скорость штока равна нулю), срабатывает один из предохранительных клапанов 19 и связывает полость высокого давления гидроцилиндра 15 со сливной полостью низкого давления насоса 4, где находится шайба 5. При снятии внешней нагрузки давление в полости гидроцилиндра 15 уменьшается, предохранительный клапан 19 закрывается и система возвращается в исходное состояние.
Выполнение автономного электрогидравлического рулевого привода с использованием для изменения угла наклона шайбы электромеханического преобразователя, вал ротора которого выполнен как одно целое с шайбой, позволяет по сравнению с прототипом построить устройство за счет исключения вспомогательного насоса, сервоклапана и сервомотора, большого числа гидролиний и замены предохранительных клапанов золотникового типа на неуправляемые клапаны конической формы, а использование сигнала от датчика поворота ротора ЭМП, соответствующего углу наклона шайбы, при формировании сигнала управления ЭМП обеспечивает высокую точность регулирования угла наклона шайбы и надежность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029891C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1973 |
|
SU1840517A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1974 |
|
SU1840519A1 |
| ЭЛЕКТРОГИДРОУСИЛИТЕЛЬ | 2002 |
|
RU2218485C2 |
| ТРЕХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2007 |
|
RU2346187C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ОГРАНИЧИТЕЛЬ ПОТРЕБЛЯЕМОЙ МОЩНОСТИ ДЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА | 1991 |
|
RU2031256C1 |
| ЭЛЕКТРОПРИВОДНОЙ НАСОСНЫЙ АГРЕГАТ | 1991 |
|
RU2073797C1 |
Использование: в автономных электрогидросистемах для регулирования подачи жидкости к исполнительным механизмам. Сущность: в качестве привода управления углом наклона шайбы 5 используется электромеханический преобразователь 7, ротор которого жестко посажен на вал 6, который выполняется как одно целое с наклонной шайбой5. Контроль угла наклона шайбы 5 производят в процессе контроля угла поворота ротора электромеханического преобразователя 7. Сигнал с выхода датчика 8 контроля угла наклона шайбы 5 алгебраически складывается с сигналом, зависящим от разности входного сигнала и сигнала обратной связи с датчика 14 положения штока исполнительного гидроцилиндра 15. Ограничитель-формирователь 10 ограничивает значение напряжения на выходе сумматора 11 для предотвращения постановки ротора электромеханического преобразователя 7 на механические упоры. Преобразователи 16 и 25 преобразуют переменные сигналы датчиков в постоянные. 2 ил.
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД, содержащий соединенные гидравлически реверсивный регулируемый насос и исполнительный гидроцилиндр с датчиком положения его штока, подключенным через суммирующее устройство к электромеханическому преобразователю механизма управления углом поворота наклонной шайбы насоса, датчик угла поворота последней, связанный с суммирующим устройством, соединенным с задатчиком, а также бак и клапаны подпитки, отличающийся тем, что, с целью упрощения конструкции и повышения точности, выходной вал ротора электромеханического преобразователя выполнен за одно с наклонной шайбой насоса, а суммирующее устройство выполнено в виде двух последовательно связанных сумматоров, ограничителя-формирователя сигнала рассогласования по положению и усилителя, причем первый сумматор соединен входами с задатчиком и датчиком положения штока гидроцилиндра, второй сумматор соединен входами с датчиком угла поворота наклонной шайбы и через указанный ограничитель-формирователь сигнала - с выходом первого сумматора, а выход второго сумматора через усилитель связан с электромеханическим преобразователем.
| Электрогидравлический привод объемного регулирования | 1977 |
|
SU653432A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
