Изобретение относится к железнодорожному транспорту, в частности к методам непрерывной регистрации колеи зазоров при списывании подвижного состава в круговые кривые железнодорожного пути, и предназначено для использования при научных исследованиях геометрического вписывания, процессов взаимодействия экипажа и железнодорожного пути, и контроля состояния рельсовой колеи железнодорожного пути в плане.
Известен способ определения положения железнодорожного пути в плане в круговых кривых, заключающийся в том, что определяют положение пути в плане при перемещении транспортного средства, включающего в себя две тележки, и измеряют при этом углы поворота тележек относительно базы транспортного средства [1] . Недостатком данного способа является то, что для измерения положения трамвайного пути в плане и ширины колеи необходимо применение специального выгона со специальными путеизмерителями (одноосными тележками), которые снабжены сложной механической системой с применением пневмоцилиндра, кроме того, в процессе измерения требуется постоянный контакт роликов с рельсом, что значительно снижает надежность и эффективность работы измерительной системы. Для обеспечения измерения требуется шесть датчиков. Необходимо обратить внимание, что данный вагон-путеизмеритель способен регистрировать кривые участки малых размеров трамвайных путем, а не кривые путей МПС и Промтранспорта, вагон не способен регистрировать кривые более 1200 м. Кроме того, положение тележки в колее неопределенно в связи с наличием свободного зазора - разностью ширины между рельсовой и колесной колеей. Для компенсации неопределенности положения тележки применены датчики линейных перемещений одноосных тележек. Делается попытка провести алгоритм измерения наружной и внутренних нитей пути. Но приведенный способ не учитывает погрешности, возникающие в кинематике устройства, а также колею зазоров в кривой.
Цель изобретения - расширение функциональных возможностей путем определения колеи, ограниченной рельсом и гребнем колеса.
Достигается это тем, что в способе определения положения железнодорожного пути в плане круговых кривых, заключающемся в том, что определяют положение пути в плане при перемещении транспортного средства, включающего в себя две тележки, и измеряют при этом углы поворота тележек относительно базы транспортного средства, тележки без разбегов осей колесных пар устанавливают в положение максимального перекоса и определяют колею, ограниченную боковой стороной головки наружного рельса и гребнем колеса из соотношения
δ = а ( ϕз - ϕп), где δ - суммарный зазор с уширением в колее;
а - половина базы тележки;
ϕп - угол поворота передней тележки в рад;
ϕз - угол поворота задней тележки, в рад.
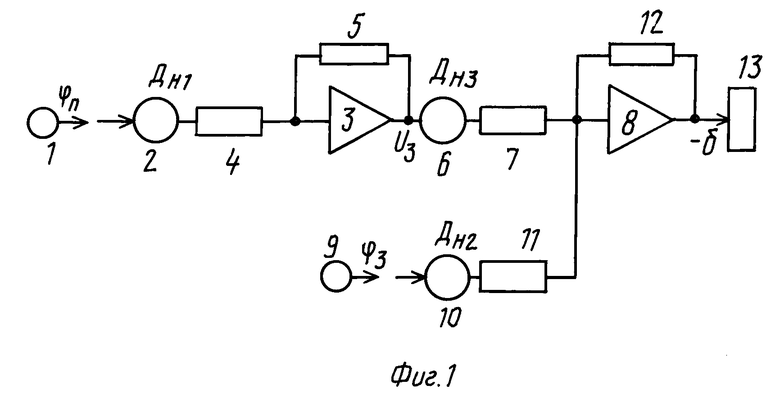
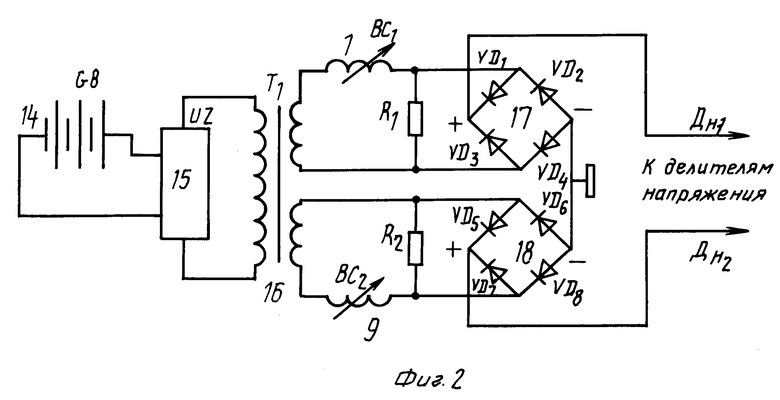
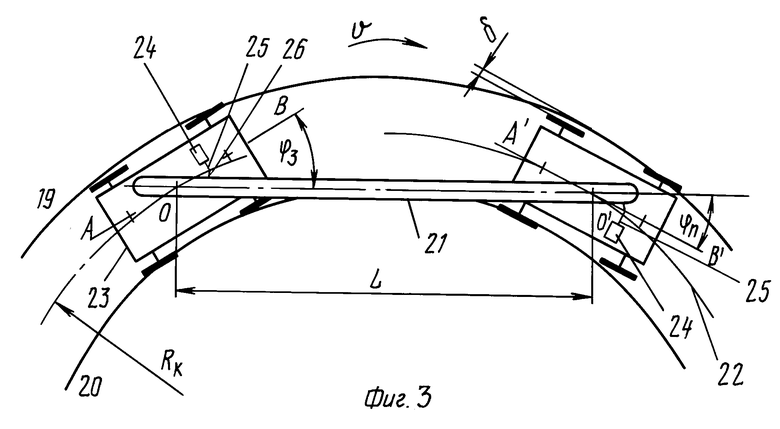
На фиг. 1 изображена структурная схема устройства; на фиг.2 - схема подключения бесконтактных датчиков этого устройства; на фиг.3 - схема работы этого устройства.
П р и м е р. При измерении колеи зазора в круговых кривых железнодорожного пути в плане используют локомотив ТГМ-4, у которого ходовые тележки не имеют поперечных разбегов колесных пар. Ходовые тележки этого транспортного средства устанавливаются в положение максимального перекоса при малых скоростях движения, в кривых до 40 км/ч, а следовательно, малых центробежных силах под действием момента от сил трения между колесами и рельсами. На тележках локомотива устанавливают корпуса бесконтактных индуктивных датчиков типа ИД-3IYX, подвижные штоки которых закреплены на раме кузова, измеряют углы поворота осей тележек относительно оси базы локомотива.
По схеме (фиг. 1) бесконтактный датчик 1 выдает электрический сигнал, пропорциональный углу поворота передней тележки относительно кузова локомотива. Сигнал поступает на делитель 2 напряжения операционного усилителя 3, работающего в режиме инвертора, через входное сопротивление 4. Операционный усилитель 3 выполнен по серийной схеме, дополненной сопротивлением 5 обратной связи. Инвертированный сигнал подается на вход делителя 6 напряжения через входное сопротивление 7, первого входа операционного усилителя 8, работающего в режиме сумматора с инвертированием. Датчик 9 выдает электрический сигнал, пропорциональный углу поворота между осью задней тележки и осью кузова транспортного средства относительно шкворня задней тележки. Сигнал поступает на делитель 10 напряжения второго входа операционного усилителя 8 через входное сопротивление 11. Операционный усилитель 8 выполнен по серийной схеме, дополненной сопротивлением 12 обратной связи. На выходе операционного усилителя 8 формируется сигнал, пропорциональный разности углов поворота передней и задней тележек относительно кузова. Электрический сигнал на выходе предлагаемого устройства пропорционален величине колеи зазоров в круговых кривых железнодорожного пути в плане. Блок 13 регистрации регистрирует величину колем зазоров в круговых кривых железнодорожного пути в плане в функции времени или проходимого пути. Устройство, реализующее способ определения колеи зазоров в круговых кривых железнодорожного пути в плане, имеет энергетический блок подключения бесконтактных датчиков к транспортному средству.
Датчики 1 и 2 подключены к аккумуляторной батарее 14 транспортного средства через статический преобразователь 15 для получения переменного синусоидального напряжения и распределительный трансформатор 16. Каждый датчик подключен к индивидуальному выпрямителю сигнала угла поворота тележки, датчик 1 - к 17, датчик 9 - к 18.
В данном случае при вписывании транспортного средства в кривые участки пути, где 19 - наружная нить, 20 - внутренняя нить рельсового пути, рама 21 транспортного средства с ходовыми тележками 22 и 23, передние колесные пары которых набегают на наружную нить рельсовой колеи, а задние колесные пары получают направляющие усилия со стороны внутренней нити, устанавливается в положении максимального перекоса. На рамах ходовых тележек 22 и 23 установлены корпуса бесконтактных датчиков 24, сердечники 25 контактных датчиков посредством жестких кинематических связей 26 соединены с рамой 21 транспортного средства.
Устройство выполнено в корпусе 200х120х120 мм, к которому с помощью экранированного кабеля подключаются выходы двух индуктивных датчиков. В качестве регистрирующего блока использовано самопишущее устройство Н-307-5. Все оборудование предлагаемого способа, реализованного в устройстве, кроме датчика, устанавливалось в кабине машиниста.
Способ имеет математическое обоснование.
Известно, что углы поворотов передней и задней тележек относительно базы транспортного средства определяется по формуле
tgϕп≈ϕп =  (1)
(1)
tgϕз≈ϕз =  (2) tg ϕп≈ϕпиtgϕз≈ϕз, т.к. углы поворота не превышают значение 5оС, где ϕп - угол поворота передней тележки;
(2) tg ϕп≈ϕпиtgϕз≈ϕз, т.к. углы поворота не превышают значение 5оС, где ϕп - угол поворота передней тележки;
ϕз - угол поворота задней тележки;
L/2 - половина базы транспортного средства;
а - половина базы тележки;
хп - полюсное расстояние передней тележки;
хз - полюсное расстояние задней тележки;
R - радиус кривой железнодорожного пути.
При положении транспортного средства в кривой в положении максимального перекоса, хп = хз = х. Находим полюсное расстояние из выражения (1)
х = L/2 + a - R ˙ϕп (3) Из формулы (2) определяем значение
R =  (4) Подставляем выражения (3) и (4) и упрощая получаем
(4) Подставляем выражения (3) и (4) и упрощая получаем
R =  (5) Из выражения (5) находим радиус круговой кривой
(5) Из выражения (5) находим радиус круговой кривой
R =  (6)
(6)
Для тележки значения полюсного расстояния равно
x=a+R (7) где δ - суммарный зазор с уширением колеи. Подставим выражения (6) в (3) получим
(7) где δ - суммарный зазор с уширением колеи. Подставим выражения (6) в (3) получим
δ= a (8) Из выражения (7) находим значения суммарного зазора с уширением:
(8) Из выражения (7) находим значения суммарного зазора с уширением:
δ =  (9) Подставляя (8) в (9) получим
(9) Подставляя (8) в (9) получим
δ =  (10)
(10)
Учитывая выражение (6) в выражении (10) значение зазора δ равно
δ = а ( ϕз-ϕп) (11)
Таким образом из выражения (11) видно, что величина суммарного зазора с уширением в круговой кривой железнодорожного пути в плане прямо пропорциональна разности величины углов поворота задней и передней тележек, между их продольными осями и осью рамы транспортного средства, а также величина а - половине длины базы тележки.
Использование предлагаемого способа обеспечивает следующие преимущества:
предлагаемый способ, реализованный в устройстве регистрации колеи зазоров, не требует изготовления и применения специальных вагонов и, в частности, измерительных тележек, и используется не только при измерении параметров трамвайных путем, но и путем МПС. Надежность работы измерительного устройства обеспечивается отсутствием механических узлов и применением современного электронного оборудования. Поэтому в процессе измерения получены значения колеи зазоров в круговых кривых железнодорожного пути. Кроме того, существует возможность установки устройства на всех видах железнодорожных транспортных средств, имеющих две поворотные ходовые тележки;
учитывая, что стоимость эксплуатации путеизмерительного вагона за 8 ч работы составляет 290 руб (данные Управления СКЖД), эти расходы, полностью исключаются если применить способ, реализованный в предлагаемом измерительном устройстве;
рабочая скорость передвижения путеизмерительного вагона - 5 кмч, за 8 ч вагон диагностирует рельсового пути длиной 40 км, что отражает факт закрытия перегона длиной 40 км на 8 ч, а это приводит к сбою графика движения поездов. По данным Управления СКЖД, сбой графика движения поездов на 1 ч приносит убытки в размере 13-14 тыс.руб. Поэтому за 8 ч, с учетом окон в графике движения убыток составляет 32 тыс.руб. Эти расходы полностью исключаются с использованием предлагаемого способа, т.к. устройство расположено на локомотиве, который задействован с поездом и передвигается по перегону с эксплуатационной скоростью.
Использование: определение колеи зазоров между рельсом и гребнем колеса при вписывании подвижного состава в круговые кривые железнодорожного пути. Сущность изобретения: способ заключается в том, что при перемещении транспортного средства по пути измеряют углы поворота его ходовых тележек относительно базы транспортного средства. При этом эти ходовые тележки без разбегов осей колесных пар устанавливают в положение максимального перекоса и определяют колею, ограниченную боковой стороной головки наружного рельса и гребнем колеса из соотношения, указонного в формуле. 3 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ В КРУГОВЫХ КРИВЫХ, заключающийся в том, что определяют положение пути в плане при перемещении транспортного средства, включающего в себя две тележки, и измеряют при этом углы поворота тележек относительно базы транспортного средства, отличающийся тем, что, с целью расширения функциональных возможностей путем определения колеи, ограниченной рельсом и гребнем колеса, тележки без разбегов осей колесных пар устанавливают в положение максимального перекоса и определяют колею, ограниченную боковой стороной головки наружного рельса и гребнем колеса из соотношения
b = a(ϕз-ϕп),
где b - расстояние между гребнем бандажа и наружным рельсом круговой кривой с уширением в колесе;
a - половина базы тележки;
ϕз - угол поворота задней тележки;
ϕп - угол поворота передней тележки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вагон-путеизмеритель для измерения положения пути в плане и ширины колеи | 1978 |
|
SU753968A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
