1
Изобретение относится к железнодорожному транспорту.
Известен вагон-путеизмеритель для измерения положения пути в плане и ширины колеи, содержащий кузов, опирающийся на ходовую тележку, измерительную систему, включающую в себя ш.арнирные четырехзвенники, несущие на нижних концах измерительные ролики, трособлочную систему, связывающую измерительные ролики с пружинами прижатия их к рельсам, и датчики линейных перемещений измерительных роликов, механически связанные с последними 1.
Недостатком этого вагона-путеизмерителя является то, что он не позволяет контролировать расстояния между рельсами (шаблон) и положение в пути в плане (рихтовку) трамвайных путей с желобчатыми рельсами и кривыми участками малых радиусов.
Цель изобретения - повышение эффек-тивности вагона-путеизмерителя для измерения положения пути в плане и ширины колеи.
Для достижения этой цели шарнирные четырехзвенники измерительной .системы закреплены на рамах одноосных тележек.
щарнирно прикрепленных к ходовой тележке и расположенных с обеих ее концов, причем измерительная система снабжена опорными роликами, закрепленными на нижних концах упомянутых четырехзвенников,профильными направляющими для опорных роликов, установленными на рамах одноосных тележек, и датчиками угловых перемещений ходовой тележки и одноосных тележек, а датчик угловых перемещений ходовой тележки связан с кузовом вагона. Причем
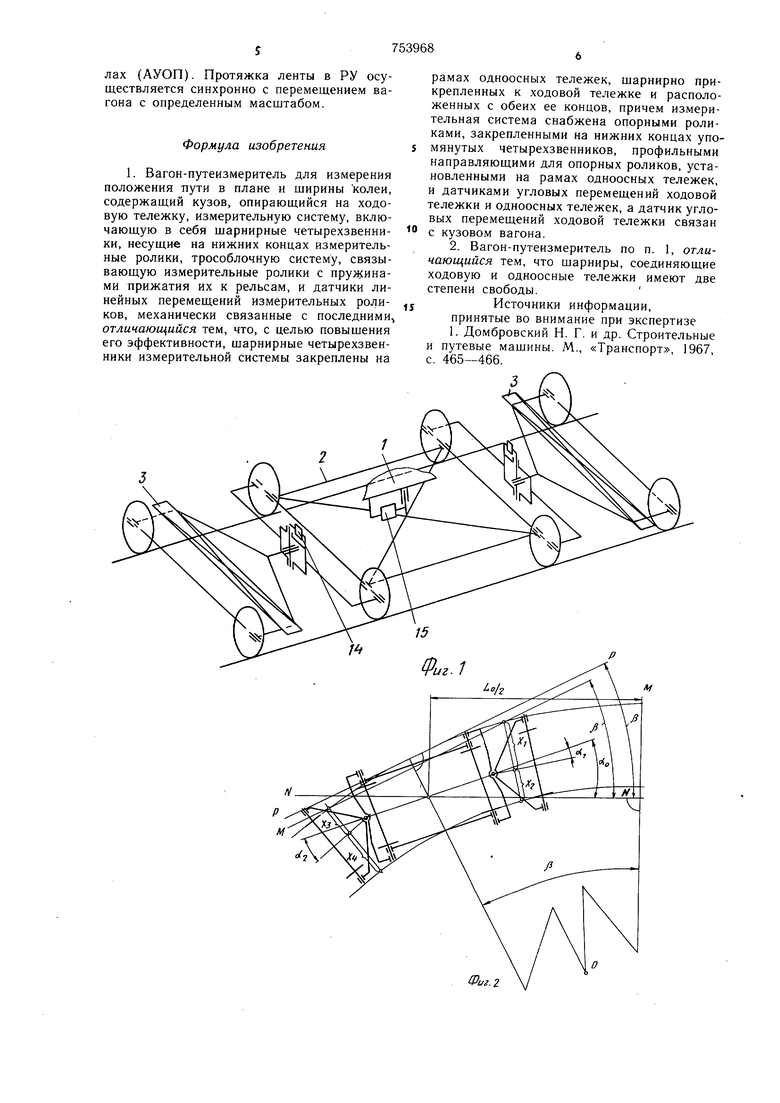
10 щарниры, соединяющие ходовую и одноосные тележки, имеют две степени свободы. На фиг. 1 изображена кинематическая схема вагона-путеизмерителя для измерения положения пути в плане и щирины колеи; на фиг. 2 - то же, вид в плане; на фиг. 3 - общий вид вагона-путеизмерителя для измерения положения пути в плане и щирины колеи; на фиг. 4 - электрическая схема измерительной системы.
Вагон-путеизмеритель для измерения положения пути в плане и ширины колеи содержит кузов 1, опирающийся на ходовую тележку 2, две одноосные тележки 3. Одноосные тележки шарнирно прикреплены к ходовой тележке и расположе п 1 с обеих
ее концов. На рамах одноосных тележек закреплены шарнирные четырехзвенники 4 измерительной системы. Измерительная система состоит из шарнирных четырехзвенников 4 с измерительными роликами 5. Последние прижаты к рельсу 6 пружинами 7 через трособлочную систему 8. Для опускания в рабочее положение шарнирного четырехзвенника 4 на раме одноосной тележки закреплен пневмоцилиндр 9. Для заведения измерительных роликов 5 в желоб рельса предусмотрены закрепленные на раме профильнь1е направляющие 10, с которыми контактируют опорные ролики 11, установленные на пальцах 12 нижних концов шарнирных четырехзвенников 4. Датчики измерительной системы снабжены механической связью, причем четыре датчика 13 линейных перемеш,ений измерительных роликов 5 установлены на раме одноосной тележки (по два на каждой) и связаны с роликами, два датчика 14 угловых перемещений одноосных тележек 3 относительно ходовой тележки 2 связаны с рамами одноосных тележек и ходовой тележки, а датчик 15 углового перемещения ходовой тележки относительно кузова вагона 1 связан с рамами ходовой тележки и кузова вагона.
Вагон-путеизмеритель работает следующим образом.
При подаче воздуха в пневмоцилиндр 9 измерительный ролик 5 движется по траектории, определяемой профильной направляющей 10, по которой катится опорный ролик 11, что обеспечивает проход измерительного ролика над внутренней губкой рельса, опускание в желоб и прижатие к рабочей грани головки рельса. При дальнейшем перемещении измерительный ролик 5, опираясь о рабочую грань рельса, отводит опорный ролик 11 от профильной направляющей 10, обеспечивая себе тем самым свободу перемещения в горизонтальной плоскости. Горизонтальные линейные перемещения измерительного ролика 5 относительно рамы одноосной тележки передаются трособлочной системой 8 датчику 13. Угловые перемещения одноосных тележек 3 относительно ходовой тележки 2 воспринимаются датчиками 14, а угловые перемещения ходовой тележки 2 относительно рамы кузова вагона 1 - датчиками 15. Контроль изменения ширины колеи осуществляется алгебраическим суммированием показаний двух датчиков 13, расположенных на раме одноосной тележки и связанных с измерительными роликами 5, контактирующими с разноименными рельсовыми нитями. Положение рельсовой нити в плане оценивается по характеру изменения величины тангенса угла,, образованного хордой, проведенной через точки контакта, с рельсом двух измерительных роликов 5, расположенных на одной рельсовой нити, и продольной осью ходовой тележки 2. Величина тангенса определяется алгебраическим суммированием показаний датчиков 13- 15 МО разработанному алгоритму.
В принятой схеме (см. фиг. 2) измеряется тангенс угла Д образованного касательной к рельсовой нити Р-Р и продольной осью кузова вагона N-N. Касательная Р-Р заменена параллельной ей секущей М-М (часть секущей - мнимая хорда), проведенной через точки контакта с рельсом двух измерительных роликов, расположенных на одной рельсовой нити. Измерение основано на следующих принципах.
При заклиненном положении ходовой тележки в колле ig/3 tg а.
Однако в действительности положение тележки в колее неопределенно в связи с наличием свободного зазора (разностью ширины рельсовой и колесной колеи). Для компенсации неопределенности положения тележки применены датчики линейных перемещений измерительных ролнков и угловых перемещений одноосных тележек. При JJ этом алгоритм измерения представляется для первой нити (на фиг. 2 - наружная) в виде:
(x,-хз)-Сг(а,-аг)+Сзао,(1)
S где С1,С2ИСз-масщтабные множители;
Х1,Хз -линейные перемещения измерительных роликов; 0 - угол поворота тележки относительно кузова;
ij i-углы поворота одноосных тележек относительной ходовой тележки.
Для второй нити алгоритм аналогичен с заменой х, и х з на Xj и Х4.
Указанный выще tg0 принят в качестве J параметра, характеризующего положение пути в плане, потому что это значительно упрощает схему обработки сигналов датчиков. Принципиально этот параметр не отличается от принятого в настоящее время параметра-стрелы (Ист) при стандартной ° хорде (ист), так как они связаны функциональной зависимостью:
(г)
4-л
где do - база вагона.
Нормативные значения ig0 рассчитываются в соответствии с формулой (2) по нормативным значениям .
Линейные и угловые перемещения в устройстве для контроля положения рельсовых нитей в плане снимаются в виде электрических сигналов (например, с помощью индуктивных датчиков 1-6, фиг. 4), которые после преобразования по схеме фиг. 4 поступают на регистрирующее устройство (РУ) (например, стандартный самописец Н-327) или устройство автоматической рас шифровки и оценки состояния пути в баллах (АУОП). Протяжка ленты в РУ осуществляется синхронно с перемещением вагона с определенным масщтабом.
Формула изобретения
1. Вагон-путеизмеритель для измерения положения -пути в плане и щирины колеи, содержащий кузов, опирающийся на ходовую тележку, измерительную систему, включающую в себя щарнирные четырехзвенники, несущие на нижних концах измерительные ролики, трособлочную систему, связывающую измерительные ролики с пружинами прижатия их к рельсам, и датчики линейных перемещений измерительных роликов, механически связанные с последними отличающийся тем, что, с целью повыщения его эффективности, щарнирные четырехзвенники измерительной системы закреплены на
рамах одноосных тележек, щарнирно прикрепленных к ходовой тележке и расположенных с обеих ее концов, причем измерительная система снабжена опорными роликами, закрепленными на нижних концах упомянутых четырехзвенников, профильными направляющими для опорных роликов, установленными на рамах одноосных тележек, и датчиками угловых перемещений ходовой тележки и одноосных тележек, а датчик угловых перемещений ходовой тележки связан с кузовом вагона.
2. Вагон-путеизмеритель по п. 1, отличающийся тем, что щарниры, соединяющие ходовую и одноосные тележки имеют две степени свободы.
Источники информации, принятые во внимание при экспертизе 1. Домбровский Н. Г. и др. Строительные и путевые мащины. М., «Транспорт 1967, с. 465-466. Ы J

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ В КРУГОВЫХ КРИВЫХ | 1990 |
|
RU2030505C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2394120C2 |
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
| Железнодорожный путеизмеритель | 1939 |
|
SU59481A1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СПОСОБ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ НЕРОВНОСТЕЙ (РИХТОВКИ) И КРИВИЗНЫ В ПЛАНЕ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2276216C2 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2513338C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2009 |
|
RU2394714C1 |

Х,(/2)
г/о
3
-,з(2,)
Uo
Г- W
uUd,,2
