Изобретение относится к радиолокационным системам, в частности к системам с непрерывным излучением сигнала, и может использоваться для точного определения высот в космической технике при спуске летательного аппарата.
Наиболее близким к заявляемому по технической сущности является радиовысотомер, содержащий вычислитель, синхронизатор, блок автоматической регулировки усиления (АРУ), с помощью которых достигается высокая точность измерения. Данное измерение с высокой точностью может проводиться только при отсутствии помех различного рода. В случае же воздействия их и прошедших через фильтр высокой частоты выделяется огибающая данной помехи, которая поступает на вход вычислителя для обработки как полезный сигнал, что исключается в изобретении. Также в данном устройстве осуществляется обработка аналоговой величины, которая несет в себе информацию о времени задержки сигнала, по которой судят о высоте ЛА. Погрешность данной обработки гораздо больше, чем при цифровой обработке информации, что и делается в заявляемом устройстве.
Цель изобретения - повышение точности измерения высоты и помехозащищенности устройства.
Это достигается тем, что в устройство, содержащее последовательно соединенные модулятор, генератор высокой частоты, смеситель, усилитель-ограничитель, выход которого соединен с полосовым фильтром и блоком АРУ, выход которого соединен с вторым входом усилителя-ограничителя, второй выход генератора высокой частоты соединен с передающей антенной, а вход приемной антенны соединен с вторым входом смесителя, введены видеодетектор, первый элемент И, первый триггер, второй элемент И, генератор тактовых импульсов (ГТИ), цифровой компаратор (ЦКП), элемент ИЛИ, реверсивный счетчик, третий элемент И, формирователь прямоугольных импульсов, второй триггер, линия задержки, электромагнитный включатель (ЭВМ), постоянно-запоминающее устройство (ПЗУ), причем выход полосового фильтра соединен с входом видеодетектора, выход которого соединен с первым входом первого триггера, с вторым входом первого элемента И и с вторым входом второго элемента И, первый вход которого соединен с ГТИ, а выход - с первым входом ЦКП, первый выход которого соединен с первым входом элемента ИЛИ, соединенным своим выходом с первым входом первого элемента И, выход которого соединен с вторым входом ЦКП и вторым входом первого триггера, соединенного своим выходом с третьим входом ЦКП, второй выход ЦКП соединен с вторым входом элемента ИЛИ, с вторым входом реверсивного счетчика и с вторым входом третьего элемента И, третий выход соединен через замыкающий контакт с выходом устройства, формирователь прямоугольных импульсов, соединенный своим входом с модулятором, а выходом - с вторым триггером и линией задержки, выход которой соединен с первым входом третьего элемента И, соединенного своим выходом с первым входом реверсивного счетчика, который соединен с электромагнитным включателем, выход второго триггера соединен с входом ГТИ, ПЗУ соединено через шину данных c входом ЦКП.
Поставленная цель достигается за счет анализа в цифровой форме длительности видеоимпульса с видеодетектором, сравнения его с задаваемыми величинами, в цифровых кодах которых заданы фиксиро- ванная высота полета и возможная длительность помехи, что дает большую точность при изменении и повышает помехозащищенность устройства, чем при анализе аналоговых величин, а также за счет временного сравнения строб-импульса с линии задержки с обрабатываемым сигналом с ЦКП. Данное временное сравнение достигается за счет введения закона модуляции (см. фиг.4), что также повышает помехозащищенность устройства.
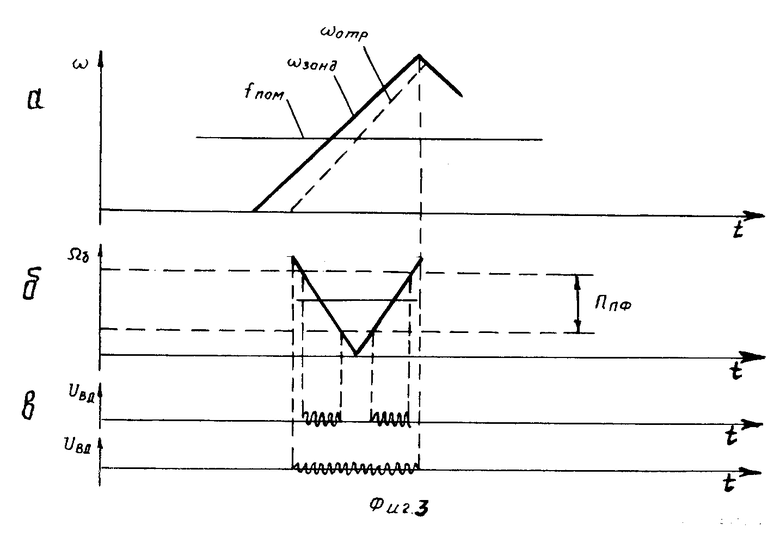
На фиг. 1 приведена структурная электрическая схема предлагаемого радиовысотомера; на фиг.2 - эпюры, поясняющие физический принцип, на котором работает радиовысотомер; на фиг.3 и 4 - эпюры, поясняющие работу радиовысотомера. где ω - частота (зондирующего и отраженного) сигналов;
Ωб- частота сигнала биений;
Uд - напряжение на выходе видеодетектора;
Ппф - полоса пропускания полосового фильтра;
Uвд - напряжение на входе видеодетектора;
Uм - напряжение на втором выходе модулятора;
Uфп - напряжение на выходе формирователя прямоугольных импульсов;
Uдч - напряжение на выходе последнего делителя частоты;
Uлз - напряжение на выходе линии задержки;
Uпом - напряжение на втором выходе УДК при прохождении помехи;
Uбг - напряжение на выходе ждущего блокинг-генератора;
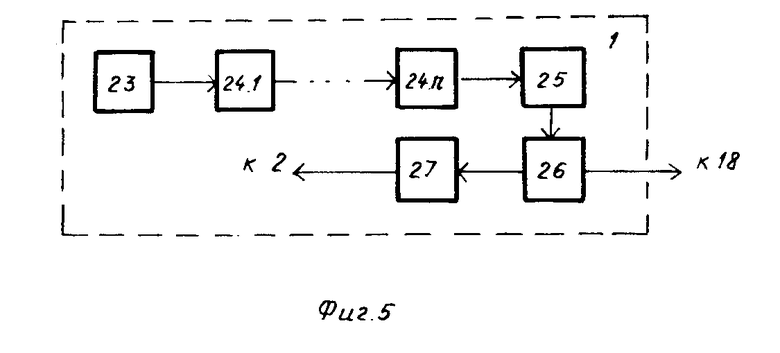
на фиг.5 - структурная электрическая схема модулятора.
Радиовысотомер содержит модулятор 1, генератор 2 высокой частоты, смеситель 3, усилитель-ограничитель 4, передающую антенну 5, приемную антенну 6, блок АРУ 7, полосовой фильтр 8, видеодетектор 9, первый элемент И 10, первый триггер 11, второй элемент И 12, ГТИ 13, цифровой компаратор 14, элемент ИЛИ 15, реверсивный счетчик 16, третий элемент И 17, формирователь 18 прямоугольных импульсов, второй триггер 19, линию 20 задержки, ЭВМ 21, ПЗУ 22, причем модулятор последовательно соединен с генератором высокой частоты 2, смесителем 3, с первым входом усилителя-ограничителя 4, выход которого соединен с полосовым фильтром 8 и блоком АРУ 7, выход которого соединен с вторым входом усилителя-ограничителя 4, второй выход генератора 2 соединен с передающей антенной 5, а вход приемной антенны 6 соединен с вторым входом смесителя 3, видеодетектор 9, вход которого соединен с выходом полосового фильтра 8, а выход с первым входом первого триггера 11, с вторым входом первого элемента И 10 и с вторым входом второго элемента И 12, первый вход которого соединен с ГТИ 13, а выход - с первым входом ЦКП 14, первый выход которого соединен с первым входом элемента ИЛИ 15, соединенным своим выходом с первым входом первого элемента И 10, выход которого соединен с вторым входом ЦКП 14 и вторым входом первого триггера 11, соединенного своим выходом с третьим входом ЦКП 14, второй выход ЦКП 14 соединен с вторым входом элемента ИЛИ 15, с вторым входом реверсивного счетчика 16 и с вторым входом третьего элемента И 17, третий выход соединен через замыкающий контакт с выходом устройства, формирователь 18 прямоугольных импульсов, соединенный своим входом с модулятором 1, а выходом с вторым триггером 19 и линией 20 задержки, выход которой соединен с первым входом третьего элемента И 17, соединенного своим выходом с первым входом реверсивного счетчика 16, который соединен с ЭВМ 21, выход второго триггера 19 соединен с входом ГТИ 13, ПЗУ 22 соединено через шину данных с входом ЦКП 14.
Модулятор 1 состоит из кварцевого генератора 23, делителей частоты 24.1. . . 24. n, ждущего блокинг-генератора 25, генератора 26 пилообразного напряжения и преобразователя 27 напряжения в частоту. Количество делителей частоты 24.1...24.n выбирается в соответствии с временем периода модуляции.
Радиовысотомер работает следующим образом.
Принцип действия данного радиовысотомера основан на определении времени длительности видеоимпульса с видеодетектора 9. При этом каждой длительности видеоимпульса соответствует определенная высота летательного аппарата над поверхностью земли. Чем ближе летательный аппарат к земной поверхности, тем возрастает длительность видеоимпульса (см. фиг.2а, б, в). Путем анализа данной длительности определяют истинное значение высоты.
Частотно-модулированные колебания из модулятора 1 по закону модуляции (см. фиг.4а, б, в) проходят через генератор 2 высокой частоты и посылаются передающей антенной 5 в направлении земной поверхности. Отраженный сигнал воспринимается приемной антенной 6 и поступает на второй вход смесителя 3, на первый вход которого поступает сигнал с генератора 2, который является опорным.
Смеситель 3 выделяет сигнал разностной частоты (сигнал биений), который затем поступает на усилитель-ограничитель 4, охваченный блоком АРУ 7.
Усиленный сигнал с частотой биений подается на полосовой фильтр 8. Если сигнал входит в полосу пропускания фильтра 8, он поступает на вход видеодетектора 9 (см. фиг.3а, б, в, г). Образуется видеоимпульс, длительность τд которого изменяется по закону
τд=  - Tзад , (1)
- Tзад , (1)
где Тм - период модуляции;
Тзад =  , (2) где Н - высота над земной поверхностью;
, (2) где Н - высота над земной поверхностью;
С - скорость распределения радиоволн;
τд=  -
-  . (3)
. (3)
Данный видеоимпульс поступает на инверсный вход первого элемента И 10, закрывая его, на первый вход первого триггера 11, не оказывая на него никакого влияния, и на вход второго элемента И 12, подготавливая его к открытию. Одновременно с открытием второго элемента И 12 через него начинают проходить тактовые импульсы, которые образуются после опрокидывания второго триггера 19, запускающего своим перепадом напряжения ГТИ 13. Таким образом, в течение длительности видеоимпульса через второй элемент И 12 поступают тактовые импульсы и заполняют анализируемый регистр ЦКП 14, в ЦПК 14 происходит анализ полученной информации по верхнему и нижнему пределу в цифровой форме.
Данные верхнего и нижнего пределов в ЦКП 14 вводятся в цифровой форме с помощью ПЗУ 22 перед полетом летательного аппарата. Цифровой код, введенный через шину данных в ПЗУ 22 в верхний предел ЦКП 14 соответствует длительности видеоимпульса на определенной фиксированной высоте
Hфикс =  . (4)
. (4)
Нижний предел в ЦKП 14 задается в соответствии с той длительностью видеоимпульса, которая образуется при прохождении непрерывной немодулированной помехи через полосовой фильтр 8. Длительность видеоимпульса помехи гораздо мала в соответствии с длительностью полезного сигнала (см. фиг.3).
ПЗУ 22 выполнено в виде интегральной микросхемы. Вход "Адрес" ПЗУ 22 означает выбор пары допусков, необходимый для задания фиксированной высоты и возможной длительности помехи, причем возможная длительность помехи задается из условия min длительности полезного сигнала, которая образуется на высоте начала работы радиовысотометра. Второй вход "0" и "Перезапись" означает соответственно обнуление всех регистров ПЗУ 22 и триггера 19 и запись выбранной пары допусков через шину данных в верхний и нижний предел ЦКП 14.
Работа ЦКП 14 заключается в следующем. С началом открытия второго элемента И 12 начинается запись информации о длительности видеоимпульса с видеодетектора 9 в ЦКП 14. Данная запись (заполнение анализируемого регистра ЦКП 14) заканчивается с наступлением заднего фронта видеоимпульса. Причем этим задним фронтом видеоимпульс подготавливает к открытию элемент И 10 и опрокидывает триггер 11, который своим перепадом напряжения запускает ЦКП 14 на анализ. В зависимости от той информации, которую несет в себе видеоимпульс на выходе ЦКП 14, может быть три варианта.
Первый вариант: цифровое значение длительности видеоимпульса меньше нижнего предела (помеха). В этом случае ЦКП 14 выдает сигнал на первом выходе, который, пройдя через элемент ИЛИ 15, поступает на первый вход первого элемента И 10. Данный элемент И 10 открывается, так как на его втором инверсном входе отсутствует напряжение с видеодетектора 9. На выходе первого элемента И 10 появляется импульс, который перебрасывает первый триггер 11 в исходное состояние и обнуляет анализируемый регистр ЦКП 14.
Второй вариант: цифровое значение длительности видеоимпульса больше либо равно нижнему пределу и меньше либо равно верхнему пределу. Тогда на втором выходе ЦКП 14 появляется сигнал, который поступает на второй вход элемента ИЛИ 15 (работа аналогична первому варианту выхода), на второй вход третьего элемента И 17 и на второй суммирующий вход реверсивного счетчика 16. Реверсивный счетчик 16 служит для накапливания информации о высоте полета ЛА, а также для предохранения от преждевременной выдачи команды о достижении заданной высоты полета ЛА при сбое ЦKП 14.
Так как изменение частоты зондирующего сигнала является процессом периодическим, то импульсы в диапазоне высот
НN ≅Нi ≅Н1, где HN - высота начала работы радиовысотомера;
Hi - текущая высота;
Н1 - высота несколько выше, чем фиксированная, т.е. Н1 > Нфикс, поступают на счетчик 16 периодически.
При определенном накоплении информации (количестве сигналов с ЦКП 14), что соответствует высоте Н1, с выхода реверсивного счетчика 16 появляется сигнал, который воздействует на ЭВМ 21. Его контакт замыкается и коммутирует цепь для задействования выхода радиовысотомера.
С первого входа (вычитающего) реверсивного счетчика 16 снимается сигнал только при прохождении помехи. В этом случае открывается третий элемент И 17. Это происходит в момент, когда с линии 20 задержки поступает строб-импульс на первый вход третьего элемента И 17, на его втором входе при прохождении помехи также присутствует напряжение (см. фиг.4г, д, е).
При обработке полезного сигнала третий элемент И 17 не открывается, так как на его входах поочередно присутствует напряжение с линии 20 задержки или с второго выхода ЦКП 14.
Третий вариант: длительность видеоимпульса с видеодетектора 9 больше верхнего предела, что соответствует достижению летательного аппарата заданной высоты. В этом случае ЦКП 14 выдает сигнал с третьего своего выхода, который поступает на выход устройства через замкнутый контакт.
Таким образом, при определении фиксированной высоты Нфикс =  обработка информации в радиовысотомере осуществляется в цифровой форме, что дает выше точность измерения, чем в аналогах и прототипе, также в заявляемом радиовысотомере учитывается и влияние различных помех при измерении высоты.
обработка информации в радиовысотомере осуществляется в цифровой форме, что дает выше точность измерения, чем в аналогах и прототипе, также в заявляемом радиовысотомере учитывается и влияние различных помех при измерении высоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2519911C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2002 |
|
RU2226695C1 |
| СТАНЦИЯ ПРИЦЕЛЬНЫХ ПОМЕХ РАДИОЛИНИЯМ УПРАВЛЕНИЯ ВЗРЫВНЫМИ УСТРОЙСТВАМИ | 2005 |
|
RU2292059C1 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2258943C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2522907C2 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |
| Радиоприемное устройство с защитой от помех | 1990 |
|
SU1786666A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ПОСЛЕДОВАТЕЛЬНОГО ОБЗОРА ПО ДАЛЬНОСТИ С ПЕРЕСТРОЙКОЙ ПО ЛИНЕЙНОМУ ЗАКОНУ ДЛИТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ФАЗОМАНИПУЛИРОВАННЫХ РАДИОИМПУЛЬСОВ | 2009 |
|
RU2405170C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478212C1 |


Использование: радиолокация для измерения высоты. Сущность изобретения: радиовысотомер содержит модулятор 1, генератор 2 высокой частоты, смеситель 3, усилитель-ограничитель 4, передающую антенну 5, приемную антенну 6, блок 7 автоматической регулировки усиления, полосовой фильтр 8, видеодетектор 9, элементы И 10, 12 и 17, триггеры 11 и 19, генератор 13 тактовых импульсов, цифровой компаратор 14, элемент ИЛИ 15, реверсивный счетчик 16, формирователь 18 прямоугольных импульсов, линию 20 задержки, электромагнитный выключатель 21, постоянное запоминающее устройство 22. 5 ил.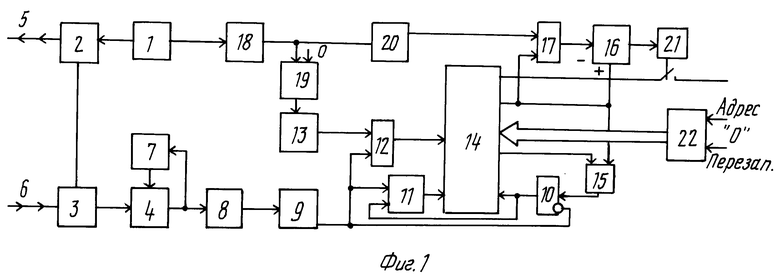
РАДИОВЫСОТОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ, содержащий последовательно соединенные модулятор, генератор высокой частоты, смеситель и усилитель-ограничитель, выход которого соединен с входами полосового фильтра и блока автоматической регулировки усиления, выход которого соединен с вторым входом усилителя-ограничителя, второй выход генератора высокой частоты соединен с входом передающей антенны, а выход приемной антенны - с вторым входом смесителя, отличающийся тем, что в него введены видеодетектор, первый элемент И, первый триггер, второй элемент И, генератор тактовых импульсов, цифровой компаратор, элемент ИЛИ, реверсивный счетчик, третий элемент И, формирователь прямоугольных импульсов, второй триггер, линия задержки, электромагнитный выключатель, постоянное запоминающее устройство, выход полосового фильтра соединен с входом видеодетектора, выход которого соединен с вторым входом первого элемента И, первым входом первого триггера, вторым входом второго элемента И, первый вход которого соединен с генератором тактовых импульсов, а выход - с первым входом цифрового компаратора, первый выход которого через первый вход элемента ИЛИ соединен с первым входом первого элемента И, выход которого соединен с вторым входом цифрового компаратора и вторым входом первого триггера, выход которого соединен с третьим входом цифрового компаратора, второй выход цифрового компаратора соединен с вторым входом элемента ИЛИ, вторым входом реверсивного счетчика и вторым входом третьего элемента И, третий выход цифрового компаратора соединен с замыкающим контактом электромагнитного выключателя и является выходом радиовысотомера, вход формирователя прямоугольных импульсов соединен с выходом модулятора, а выход - с входом второго триггера и входом линии задержки, выход которой соединен с первым входом третьего элемента И, выход которого соединен с первым входом реверсивного счетчика, выход реверсивного счетчика соединен с входом электромагнитного выключателя, выход второго триггера соединен с входом генератора тактовых импульсов, выход постоянного запоминающего устройства соединен с шиной данных цифрового компаратора.
| Радиовысотомер с частотной модуляцией | 1975 |
|
SU564612A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
