Изобретение относится к радиолокационной технике и может быть использовано при разработке бортовых средств измерения высоты полета летательных аппаратов.
Известен рециркуляционный радиовысотомер по авторскому свидетельству СССР №326528, G01S 9/10, 1970 г., содержащий передатчик, приемник, блок электронного сопровождения, генератор тактовых импульсов, генератор синхроимпульсов, схему совпадения, триггер, устройство регулируемой задержки, блок управления, реверсивный счетчик импульсов, счетчик числа периодов рециркуляции.
Все перечисленные элементы этого аналога, кроме блока управления и счетчиков, входят и в состав заявляемого радиовысотомера.
В этом радиовысотомере используется принцип рециркуляции, а для защиты от уводящих по высоте помех введены устройство регулируемой задержки и блок управления этим устройством.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является большая систематическая погрешность измерения высоты, обусловленная нестабильностью задержки сигнала во внутренних элементах радиовысотомера (передатчик, приемник и др.).
От этого недостатка свободен импульсный рециркуляционный радиовысотомер, защищенный патентом РФ №2176382, G01F, 23/00, 2000 г. Он содержит формирователь импульсов, генератор старт-импульсов, три устройства задержки, схему ИЛИ, передатчик, приемник, антенный блок, резервуар, отражатель опорного сигнала, коммутатор задержанных импульсов, формирователь селекторных импульсов, селектор и процессор.
Общими с заявляемым радиовысотомером у этого аналога являются формирователь импульсов, генератор старт-импульсов, устройства задержки, схема ИЛИ, передатчик, приемник и антенный блок.
В этом аналоге проблема повышения точности измерения уровня решается путем разделения цикла измерения уровня вещества в резервуаре на два этапа. На первом этапе определяется систематическая погрешность измерения уровня, вызываемая нестабильностью времени задержки сигнала во внутренних цепях устройства и блоках рециркуляции. На этом этапе рециркуляция осуществляется при работе устройства по опорному сигналу, создаваемому специальным отражателем, расстояние до которого от антенного поста известно с высокой точностью. По результатам рециркуляции процессорным блоком определяются время To, включающее в себя нестабильность времени to задержки сигнала во внутренних цепях устройства, время tp задержки сигнала в цепях рециркуляции (селекторе, формирователе импульсов, устройстве задержки, схеме ИЛИ) и время ton распространения сигнала от антенного блока до отражателя и обратно. На втором этапе рециркуляция идет при работе устройства по сигналу, отраженному от поверхности вещества в резервуаре, и процессорным блоком измеряется время Tu, включающее в себя те же промежутки времени to и tp, что и в первом режиме, а кроме того, и промежуток времени th распространения сигнала от антенного блока до поверхности в резервуаре и обратно. Затем в процессорном блоке определяется разность Tu-To, которая затем пересчитывается в подлежащий измерению уровень вещества в резервуаре.
Таким образом, исключаются погрешности измерения уровня, вызываемые нестабильностью промежутков времени to и tp.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является достаточно высокая вероятность срыва процесса рециркуляции в результате флюктуации уровня отраженного от земной поверхности сигнала при использовании этого аналога в качестве бортового измерителя высоты полета летательного аппарата. Еще одной причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является достаточно ограниченная тактовая частота процессорного блока, что приводит к значительному увеличению требуемого числа рециркуляции, а следовательно, и к увеличению времени измерения и динамической ошибке измерения высоты.
Наиболее близким по технической сущности к заявляемому устройству (прототипом) является радиолокационный импульсный рециркуляционный радиовысотомер, защищенный патентом РФ №2273862, G01S 13/34, 2004 г. Он содержит последовательно включенные первый элемент ИЛИ и первую линию задержки, последовательно включенные вторую линию задержки, передатчик, направленный ответвитель и развязывающий блок, антенный блок, генератор старт-импульсов, первый и второй элементы И, второй элемент ИЛИ, триггер, СВЧ-выключатель, последовательно включенные амплитудный детектор и третья линия задержки, приемник, следящий блок и генератор тактовых импульсов. Кроме того, в состав прототипа входят блок управляемой задержки, таймер, третий элемент ИЛИ, второй триггер, четвертый, пятый, шестой и седьмой элементы И, инвертор, счетчик числа периодов рециркуляции, счетчик импульсов высоты, оперативное запоминающее устройство, вычитающее устройство, шифровальная колодка и преобразователь кодов.
Общими с заявляемым радиовысотомером у прототипа являются первый и второй элементы И, первый и второй элементы ИЛИ, первый, второй и третий элементы задержки, триггер, направленный ответвитель, развязывающий блок, антенный блок, СВЧ-выключатель, генератор старт-импульсов, генератор тактовых импульсов, передатчик, приемник, следящий блок, амплитудный детектор и их связи.
В прототипе, как и в радиовысотомере по авторскому свидетельству СССР №326528, используется принцип рециркуляции, а для защиты от уводящих по высоте помех в радиовысотомер введены шифровальная колодка, блок управляемой задержки и устройство управления этим блоком. Для обеспечения отсутствия флюктуации импульса на выходе блока управляемой задержки генератор старт-импульсов выполнен на основе деления частоты стабильного генератора. В прототип введен следящий блок, обеспечивающий слежение за передним фронтом импульса, снимаемого с выхода приемника, и рециркуляцию как в режиме измерения времени To, так и в режиме измерения высоты в процессе измерения времени Tu=To+Th, где Th=2H/C, здесь H - высота полета летательного аппарата, подлежащая измерению; C - скорость света. Окончательно высота определяется путем определения разности Tu-To и соответствующего пересчета ее в требуемую высоту H.
Причинами, препятствующими достижению в прототипе технического результата, обеспечиваемого изобретением, являются сложность и относительно низкая надежность, обусловленные большим количеством входящих в состав прототипа элементов и трудностью реализации блока управляемой задержки для обеспечения рециркуляции с переменным периодом следования импульсов.
Реализация рециркуляции с переменным периодом следования импульсов существенно увеличивает дисперсию этого периода, то есть дисперсию периода To (или Tu), среднее значение (или матожидание) которого определяется в процессе рециркуляции. Следовательно, переменный период следования импульсов рециркуляции приводит к резкому увеличению числа рециркуляции как в режиме контроля (при измерении параметра To), так и в режиме измерения параметра Tu.
Следует отметить, что в прототипе оценка статистической точности измерения параметров To и Tu не ведется. Выбор же числа рециркуляции определяется заранее большим, гарантированно достаточным для обеспечения заданной статистической точности, что делает процесс измерения необоснованно продолжительным. Это в свою очередь ведет к росту динамической ошибки измерения в процессе определения высоты.
Технической задачей, на решение которой направлено изобретение, является упрощение и повышение надежности радиовысотомера, а также расширение функциональных возможностей устройства за счет обеспечения возможности текущего контроля точности измерения.
Для достижения указанного технического результата в известный рециркуляционный радиовысотомер, содержащий последовательно включенные первый элемент ИЛИ и первую линию задержки, последовательно включенные вторую линию задержки, передатчик, направленный ответвитель и развязывающий блок, антенный блок, вход-выход которого соединен со входом-выходом развязывающего блока, генератор старт-импульсов, первый и второй элементы И, первые входы которых объединены, а вторые подключены ко входу второй линии задержки и выходу генератора старт-импульсов соответственно, второй элемент ИЛИ, первые входы первого и второго элементов ИЛИ подключены к выходам соответственно второго и первого элементов И, триггер, первый и второй входы которого подключены к выходам соответственно второго и первого элементов ИЛИ, СВЧ-выключатель, сигнальный вход которого подключен к выходу развязывающего блока, а управляющий вход - к выходу триггера, последовательно включенные амплитудный детектор, вход которого подключен ко второму выходу направленного ответвителя, и третья линия задержки, выход которой подключен ко второму входу второго элемента ИЛИ, приемник, первый вход которого подключен к выходу СВЧ-выключателя, следящий блок, первый вход которого подключен к входу второй линии задержки, второй - к выходу приемника, первый выход - ко второму входу первого элемента ИЛИ, а второй выход - ко второму входу приемника, и генератор тактовых импульсов, введен блок расчета высоты, первый вход которого соединен с первыми входами элементов И и является входом управления радиовысотомера, второй и третий входы соединены соответственно с третьим и первым выходами следящего блока, а четвертый вход - с выходом генератора тактовых импульсов, при этом вход сброса генератора старт-импульсов соединен с первым выходом следящего блока, а выход первой линии задержки соединен со входом второй линии задержки.
Отсутствуют какие-либо источники информации, в которых совокупность вновь введенного блока расчета высоты и новые связи в совокупности с остальными элементами предлагаемого радиовысотомера были бы описаны. Поэтому заявляемый радиовысотомер следует считать новым и имеющим изобретательский уровень.
Сущность изобретения поясняется чертежом, на котором приведены:
- на фиг.1 - структурная схема предлагаемого радиовысотомера;
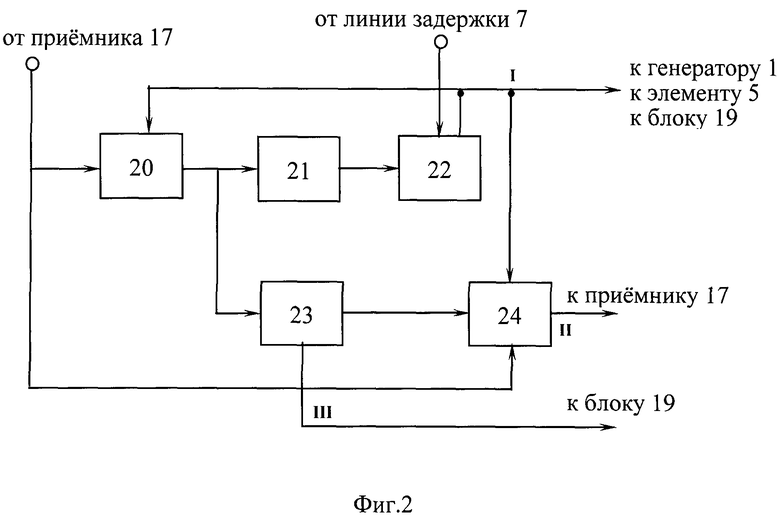
- на фиг.2 - структурная схема следящего блока;
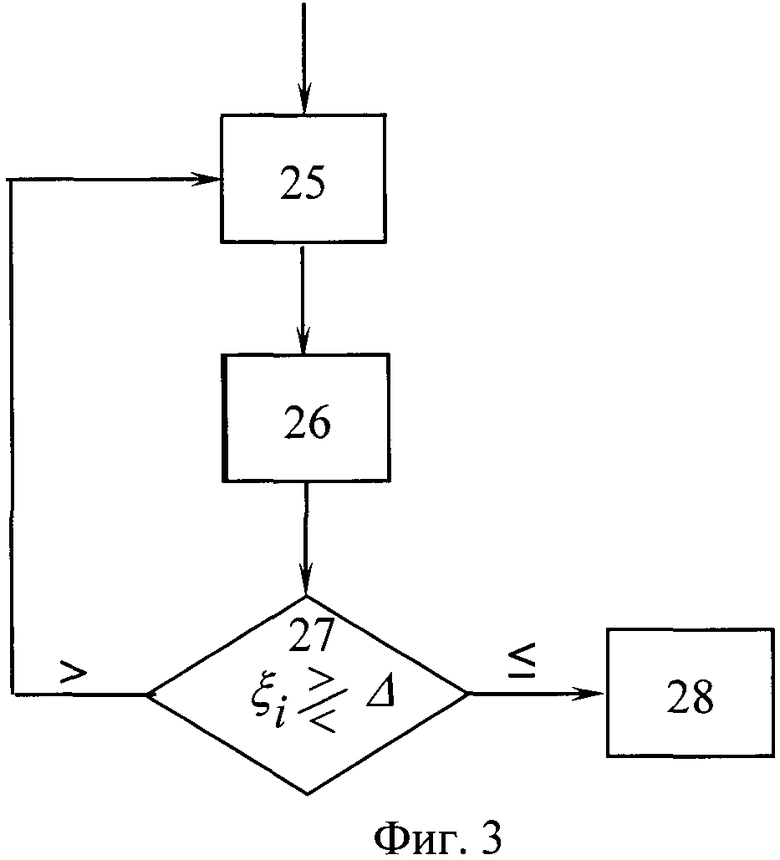
- на фиг.3 - блок-схема алгоритма работы блока расчета высоты.
Предлагаемый рециркуляционный радиовысотомер содержит генератор 1 старт-импульсов, генератор 2 тактовых импульсов, элементы 3 и 4 И, элементы 5 и 6 ИЛИ, линии 7, 8 и 9 задержки, передатчик 10, направленный ответвитель 11, развязывающий блок 12, антенный блок 13, амплитудный детектор 14, СВЧ-выключатель 15, триггер 16, приемник 17, следящий блок 18 и блок 19 расчета высоты.
Следящий блок 18 включает в себя временной дискриминатор 20, фильтр 21 нижних частот, временной модулятор 22, формирователь 23 сигнала "захват" и формирователь 24 сигнала автоматической регулировки усиления.
Элемент 5 ИЛИ, линия задержки 7, линия задержки 8, передатчик 10, ответвитель 11, развязывающий блок 12 и антенный блок 13 включены последовательно. Вход детектора 14 подключен ко второму выходу ответвителя 11, а выход - к входу линии задержки 9, выход которой подключен ко второму входу элемента 6. Первый вход элемента 6 ИЛИ подключен к выходу элемента 3 И, а выход - к первому входу триггера 16, второй вход которого соединен с выходом элемента 5 ИЛИ, а выход - с первым входом выключателя 15. Вход управления радиовысотомера соединен с первым входом блока 19 и с первыми входами элементов 3 и 4 И, второй вход элемента 3 И соединен с выходом линии задержки 7 и с первым входом блока 18, второй вход элемента 4 И соединен с выходом генератора 1, а выход - с первым входом элемента 5 ИЛИ, соединенного своим вторым входом с первым выходом блока 18, третьим входом блока 19 и входом сброса генератора 1. Первый вход приемника 17 соединен с выходом вычислителя 15, второй - со вторым выходом блока 18, а выход - со вторым входом блока 18. Второй вход блока 19 соединен с третьим выходом блока 18, а четвертый - с выходом генератора 2.
Дискриминатор 20, фильтр 21 и модулятор 22 соединены последовательно. Вход формирователя 23 соединен с выходом дискриминатора 20, первый вход является третьим выходом блока 18, а второй выход соединен с третьим входом формирователя 24. Первый вход формирователя 24 соединен с выходом модулятора 22, первым входом дискриминатора 20 и первым выходом блока 18, второй вход объединен со вторым входом дискриминатора 20 и является вторым входом блока 18, а выход является вторым выходом блока 18. Второй вход модулятора 22 является первым входом блока 18.
Функционирование радиовысотомера состоит в следующем. Генератор 1 предназначен для обеспечения начала рециркуляции или возобновления ее, если она прервалась несанкционированно. В радиовысотомере предусмотрены два режима работы. В первом режиме рециркуляция осуществляется по сигналу, проникающему вследствие специально созданной недостаточной развязки между передатчиком 10 и приемником 17 непосредственно в приемник 17 зондирующего сигнала передатчика 10. На этом этапе осуществляется измерение задержки времени To в цепях рециркуляции передатчика 10 и приемника 17.
Во втором режиме рециркуляция осуществляется в условиях достаточной развязки между передатчиком 10 и приемником 17. В этом режиме собственно и осуществляется измерение высоты. Рециркуляция осуществляется по зондирующему сигналу, отраженному от земной поверхности. В этом режиме методом рециркуляции измеряется промежуток времени Tu, связанный с промежутком времени To соотношением:
Tu=To+Th,
где Th - время прохождения зондирующим сигналом расстояния от антенного блока 13 до Земли и обратно.
Промежуток времени Th пересчитывается в подлежащую измерению высоту H по формуле:
Генератор 2 предназначен для создания стабильных по частоте тактовых импульсов с высокой частотой повторения, обеспечивающих измерение коротких промежутков времени блоком 19.
Логические элементы 4÷9 и триггер 16 служат для организации контура рециркуляции в каждом из режимов. Основой контура рециркуляции является линия задержки 7 в цепи обратной связи.
Линия задержки 8 предназначена для обеспечения задержки запуска передатчика 10 относительно запуска блока 18, что необходимо для запуска блока 18 при измерении малых высот работы радиовысотомера во втором режиме.
Передатчик 10 предназначен для формирования зондирующих СВЧ-импульсов малой длительности порядка десяти наносекунд.
Направленный ответвитель 11 предназначен для вывода части мощности СВЧ-колебаний, создаваемых передатчиком 10.
Развязывающий блок 12 предназначен для обеспечения работы передатчика 10 на антенный блок 13 и пропускания поступивших на его вход-выход импульсов с выхода антенного блока 13 на вход приемника 17.
Антенный блок 13 предназначен для излучения зондирующих импульсов СВЧ-передатчика и приема сигналов, отраженных земной поверхностью. При использовании в блоке 13 узконаправленных антенн в его состав могут входить устройства, обеспечивающие излучение сигналов по нормали к поверхности Земли по управляющим сигналам, несущим информацию об углах крена и тангажа летательного аппарата.
Детектор 14 предназначен для формирования видеоимпульса в момент времени появления зондирующего сигнала передатчика 10.
СВЧ-выключатель 15 предназначен для обеспечения прохождения зондирующего сигнала передатчика 10 на вход приемника 17 при работе радиовысотомера в первом режиме и при уменьшении затухания выключателя 15 во втором режиме.
Линия задержки 9 предназначена для задержки импульса на выходе детектора 14 на время, превышающее длительность импульса передатчика 10.
Триггер 16 предназначен для создания импульса, в течение действия которого затухание выключателя 15 минимально.
Приемник 17 предназначен для усиления и преобразования поступивших на его вход импульсов.
Следящий блок 18 предназначен для выделения отраженного сигнала на фоне помех и формирования поискового импульса, следящего за передним фронтом снимаемого с выхода приемника 17 импульса. Он формирует сигнал "Захват" при совпадении отраженного импульса с поисковым, формирует напряжение, регулирующее усиление приемника 17 с целью обеспечения постоянной амплитуды импульса на выходе приемника 17.
Блок 19 осуществляет измерение параметров To, Tu и высоты H, при этом измерение параметров To и Tu осуществляется в процессе рециркуляции. С каждым шагом рециркуляции определяется достигнутая точность измерения, а по достижении требуемой точности измерения процесс рециркуляции прекращается, результат и точность измерения фиксируются.
Для установки радиовысотомера в первый режим на вход управления на первые входы элементов 3 и 4 и на первый вход блока 19 подается сигнал с уровнем логической единицы.
Генератор 1 формирует импульсы с периодом, превышающим максимально возможный период рециркуляции. Эти импульсы через открытый элемент 4 и элемент 5 поступают на второй вход триггера 16 и приводят его в состояние логического нуля, при котором выключатель 15 имеет большое затухание.
Импульс генератора 1 через элементы 4 и 5, линию задержки 7 также поступает на вход линии задержки 8, на первый вход блока 18 и на второй вход элемента 3. Поскольку на его первый вход в этом режиме подан уровень логической единицы, импульс с входа элемента 3 проходит на его выход и через элемент 6 поступает на первый вход триггера 16 и переводит его выход в состояние логической единицы, при котором затухание выключателя 15 мало. Прошедший через линию задержки 8 импульс запускает передатчик 10, формирующий СВЧ-импульс. Этот импульс, проходя через ответвитель 11, блок 12 и выключатель 15, поступает на вход приемника 17.
В приемнике 17 поступивший на его вход импульс усиливается, преобразуется в видеоимпульс, поступающий на второй вход блока 18, временной модулятор 22, который формирует на своем первом выходе и первом выходе блока 18 поисковый импульс. Поисковый импульс с первого выхода блока 18 поступает на третий вход блока 19, на вход сброса генератора 1, предотвращая его преждевременное срабатывание, и через элемент 5 - на вход линии задержки 7.
Далее описанный процесс повторяется.
Задержка поискового импульса относительно импульса на входе линии задержки 7 и первом входе блока 18 увеличивается с каждым новым импульсом до тех пор, пока его задний фронт не совпадет с передним фронтом видеоимпульса на выходе приемника 17.
После совпадения нескольких поисковых импульсов с видеоимпульсами приемника 17 на входе следящего блока 18 на выходе временного дискриминатора 20 следящего блока 18 появляется напряжение, переводящее блок 18 в режим слежения за видеоимпульсами приемника 17. Поскольку отраженные от Земли импульсы поступают на второй выход блока 12 после импульсов передатчика, а блок 18 осуществляет поиск, начиная с минимальной задержки, захвата этих импульсов не происходит. Под действием этого напряжения срабатывает формирователь 23, и блок 18 на третьем выходе формирует сигнал "Захват" с уровнем логической единицы, который поступает на второй вход блока 19. Формирователь 24 поддерживает постоянным уровень видеоимпульса на выходе приемника 17, управляя его усилением.
Таким образом, в первом режиме рециркуляция осуществляется по контуру: элемент 5, линии задержки 7,8, передатчик 10, ответвитель 11, блок 12, выключатель 15, приемник 17, блок 18, элемент 5. При этом первый импульс (импульс запуска) формируется генератором 1 и с его выхода через элемент 4 поступает на первый вход элемента 5. Рециркуляция осуществляется с периодом То, определяемым из соотношения
To=τ7+τ8+τ10+τ17+τ18,
где τ7, τ8, τ10, τ17, τ18 - времена задержки элементов радиовысотомера, имеющих соответствующие номера согласно структурной схеме.
Остальные элементы контура рециркуляции можно считать безинерционными.
Для работы радиовысотомера во втором режиме на вход управления, на первые входы элементов 3 и 4 и на первый вход блока 19 подается сигнал с уровнем логического нуля.
Элементы 3 и 4 закрыты, следовательно, импульс генератора 1 не проходит на выход элемента 4, а импульсы с выхода линии задержки 7 не проходят на выход элемента 3. Поэтому триггер 16 находится в состоянии логического нуля, при котором затухание выключателя 15 велико, уровень зондирующего сигнала на входе приемника 17 ниже порога его чувствительности, и захват его следящим блоком 18 не происходит. Снимаемые с выхода линии задержки 7 импульсы запускают передатчик 10, СВЧ-импульсы которого через ответвитель 11 и блок 12 подводятся к блоку 13 и излучаются в направлении Земли. Снимаемые со второго выхода ответвителя 11 СВЧ-импульсы детектируются детектором 14 и через линию задержки 9 и второй вход элемента 6 поступают на первый вход триггера 16, переводя его в состояние логической единицы, при котором затухание выключателя 15 становится минимальным, что обеспечивает прохождение на вход приемника 17 сигналов, отраженных от земной поверхности и принятых блоком 13. Эти сигналы усиливаются, преобразуются приемником 17 и с его выхода поступают на второй вход блока 18, в котором обрабатываются так же, как и в первом режиме. После совпадения заднего фронта поискового импульса блока 18 с передним фронтом видеоимпульса приемника 17 блок 18 формирует на своем третьем выходе сигнал "Захват", а на втором - напряжение автоматической регулировки усиления, поддерживающее постоянной амплитуду видеоимпульса.
Таким образом, во втором режиме рециркуляция осуществляется по контуру: элемент 5, линии задержки 7, 8, передатчик 10, ответвитель 11, блок 12, блок 13, земная поверхность, блок 13, блок 12, выключатель 15, приемник 17, блок 18, элемент 5. Рециркуляция осуществляется с периодом Tu, превышающим период To рециркуляции в первом режиме на время Th, прохождения зондирующим сигналом пути от летательного аппарата - носителя радиовысотомера до Земли и обратно.
Строго говоря, периоды рециркуляции To и Tu - это случайные величины, представляющие собой промежутки времени между двумя соседними поисковыми импульсами блока 18. Блок 19 методом статистических испытаний определяет математические ожидания величин To и Tu. На его первый вход поступают сигнал логической единицы в режиме измерения матожидания периода To и сигнал логического нуля в режиме измерения матожидания периода Tu, на второй вход - сигнал "Захват" из блока 18, свидетельствующий об установлении режима рециркуляции, на третий вход - поисковые импульсы из блока 18, а на четвертый вход - счетные тактовые импульсы генератора 2 стабильной частоты. В блоке 19 также осуществляется оценка статистической погрешности определения матожиданий периодов To и Tu. Кроме того, в нем осуществляют пересчет матожиданий периодов To и Tu в измеряемую высоту полета летательного аппарата.
Блок-схема алгоритма работы блока 19 содержит четыре оператора (операторы 25÷28 на фиг.3).
Оператор 25 по поступлении поискового импульса на третий вход блока 19 из блока 18 осуществляет подсчет числа Ti тактовых импульсов (в наносекундах), поступивших на четвертый вход блока 19 от генератора 2 в промежутке между соседними поисковыми импульсами в текущем i-м цикле рециркуляции. Затем результат подсчета Ti и управление передаются оператору 26.
Оператор 26 определяет промежуточные вспомогательные параметры в i-м цикле рециркуляции:
- текущее матожидание mi периода To (или Tu):
- текущую сумму a i квадратов промежутков времени между поисковыми импульсами:

- текущую сумму bi промежутков времени между поисковыми импульсами:
- текущую погрешность ξi оценки матожидания mi:
здесь tα - квантиль нормального распределения, соответствующий заданной доверительной вероятности нахождения матожидания измеряемого периода в промежутке mi±ξi.
Далее результаты расчетов mi и ξi и управление передаются оператору 27, который осуществляет проверку условия ξi>Δ, где Δ - заданная статистическая погрешность оценки матожидания mi. Выполнение этого условия означает, что погрешность ξi оценки еще достаточно велика и следует продолжить рециркуляцию. Управление в этом случае возвращается к оператору 25, и описанный процесс продолжается с наращиванием номера i цикла рециркуляции. Выполнение условия ξi≤Δ означает, что статистическая погрешность оценки матожидания mi не превышает заданной. В этом случае управление передается оператору 28, который останавливает рециркуляцию, отображает полученные результаты расчета mi и ξi в качестве конечных:
m=mi;
ξ=ξi.
Кроме того, оператор 28 пересчитывает рассчитанные матожидания периодов Tu и Ti в конечный результат - высоту полета H носителя радиовысотомера. Расчет ведется по формуле:
где С=3·108 м/с - скорость света;
mu - матожидание периода Tu в секундах;
mo - матожидание периода To в секундах.
Результат пересчета отображается и при необходимости фиксируется вместе с текущим временем с помощью средств отображения, входящих в состав блока 19 (на чертеже не показаны).
На этом процесс измерения завершается. Блок 19 и радиовысотомер в целом готовы к измерению нового значения высоты полета летательного аппарата.
Нетрудно видеть, что предлагаемый радиовысотомер в отличие от прототипа не содержит трудного в реализации и эксплуатации блока управляемой задержки с шифровальной колодкой, счетчиков импульсов, запоминающего и вычитающих устройств, таймера, преобразователя кодов и большого числа логических элементов. Это делает заявляемый радиовысотомер более простым и надежным в работе. Наличие в прототипе блока управляемой задержки и связанная с этим возможность управления периодом следования импульсов не дают ему преимуществ перед заявляемым радиовысотомером. Дело в том, что наличие управляемого периода следования импульсов косвенно является признаком наличия в радиовысотомере защиты от уводящей по высоте помехи и стимулирует принятие соответствующих эффективных контрмер, не требующих точного знания периода следования импульсов.
В предлагаемом радиовысотомере осуществляется текущий контроль точности расчета матожидания периода рециркуляции, и процесс рециркуляции прекращается сразу по достижении достаточной точности расчета. Это позволяет в предлагаемом радиовысотомере сократить процесс рециркуляции по сравнению с прототипом, где такой контроль отсутствует, и приходится осуществлять рециркуляцию с негарантируемой точностью результата либо заведомо завышать число рециркуляции, что делает расчеты необоснованно продолжительными и приводит к росту динамической ошибки измерения высоты.
Предлагаемый радиовысотомер достаточно легко реализуем. Вновь введенный блок 19 может быть реализован на основе программируемых логических интегральных схем типа FLEX фирмы "ALTERA". В принципе функции этого блока может также выполнять бортовой компьютер носителя радиовысотомера при осуществлении программирования этого компьютера на выполнение соответствующих функций и установлении соответствующих связей с остальными элементами радиовысотомера.
Остальные составные элементы предлагаемого радиовысотомера (генераторы 1 и 2, логические элементы 3-6, линии задержки 7÷9, передатчик 10, направленный ответвитель 11, развязывающий блок 12, антенный блок 13, детектор 14, СВЧ-выключатель 15, триггер 16, приемник 17 и следящий блок 18) могут быть реализованы на основе соответствующих составных элементов прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2273862C1 |
| РАДИОВЫСОТОМЕР С ЧАСТОТНО-МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2012 |
|
RU2519952C2 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2519914C2 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2258943C1 |
| РАДИОДАТЧИК ВЫСОТЫ | 2007 |
|
RU2336540C1 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2282211C2 |
| КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ СИСТЕМЫ РАДИОСВЯЗИ | 2013 |
|
RU2539334C1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2012 |
|
RU2518373C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
Изобретение относится к радиолокационной технике и может быть использовано при разработке бортовых средств измерения высоты полета летательных аппаратов. Рециркуляционный радиовысотомер содержит генератор старт-импульсов, генератор тактовых импульсов, два элемента И, два элемента ИЛИ, три линии задержки, передатчик, направленный ответвитель, развязывающий блок, антенный блок, амплитудный детектор, СВЧ-выключатель, триггер, приемник, следящий блок и блок расчета высоты, определенным образом соединенные между собой. Достигаемый технический результат - упрощение радиовысотомера и повышение его надежности, а также расширение функциональных возможностей за счет обеспечения возможности текущего контроля точности измерения. 3 ил.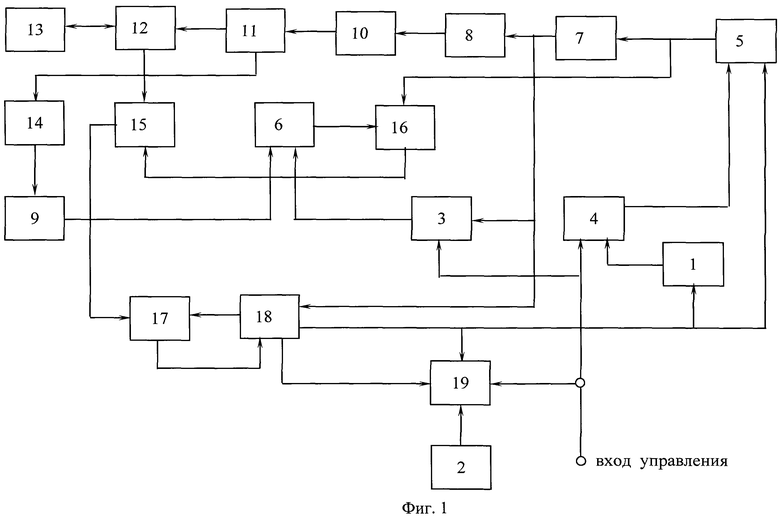
Рециркуляционный радиовысотомер, содержащий последовательно включенные первый элемент ИЛИ и первую линию задержки, и последовательно включенные вторую линию задержки, передатчик, направленный ответвитель, развязывающий блок, антенный блок, вход-выход которого соединен со входом-выходом развязывающего блока, генератор старт-импульсов, первый и второй элементы И, первые входы которых объединены, а вторые подключены ко входу второй линии задержки и выходу генератора старт-импульсов соответственно, второй элемент ИЛИ, первые входы первого и второго элементов ИЛИ подключены к выходам соответственно второго и первого элементов И, триггер, первый и второй входы которого подключены к выходам соответственно второго и первого элементов ИЛИ, СВЧ-выключатель, сигнальный вход которого подключен к выходу развязывающего блока, а управляющий вход - к выходу триггера, последовательно включенные амплитудный детектор, вход которого подключен ко второму выходу направленного ответвителя, и третья линия задержки, выход которой подключен ко второму входу второго элемента ИЛИ, приемник, первый вход которого подключен к выходу СВЧ-выключателя, следящий блок, первый вход которого подключен к входу второй линии задержки, второй - к выходу приемника, первый выход - ко второму входу первого элемента ИЛИ, а второй выход - ко второму входу приемника, и генератор тактовых импульсов, отличающийся тем, что в него введен блок расчета высоты, первый вход которого соединен с первыми входами первого 3 и второго 4 элементов И и является входом управления радиовысотомера, второй и третий входы соединены соответственно с третьим и первым выходами следящего блока, а четвертый вход - с выходом генератора тактовых импульсов, при этом вход сброса генератора старт-импульсов соединен с первым выходом следящего блока, а выход первой линии задержки соединен с входом второй линии задержки.
| РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2273862C1 |
| RU 2004124672 A, 27.01.2006 | |||
| RU 2004128516 A, 10.03.2006 | |||
| РАДИОДАТЧИК ВЫСОТЫ | 2007 |
|
RU2336540C1 |
| ЭЛЕКТРОЛИТ ДЛЯ ЭЛЕКТРОХИМИЧЕСКОГО ОСАЖДЕНИЯ ФУНКЦИОНАЛЬНЫХ ПОКРЫТИЙ НИКЕЛЬ - БОР | 1993 |
|
RU2124072C1 |
| WO 2007038068 A3, 18.05.2007 | |||
| US 4509049 A, 02.04.1985 | |||
| Устройство для перевозки сыпучих грузов | 1983 |
|
SU1113289A1 |

