Изобретение относится к измерительной технике и может быть использовано для измерения неэлектрических величин, например, деформаций и усилий.
Известно тензометрическое устройство, содержащее последовательно соединенные тензомост, усилитель, аналого-цифровой преобразователь и регистратор [1].
В данном устройстве на погрешность измерения оказывает существенное влияние нестабильность коэффициента передачи тензомоста, которая, например, при использовании интегральных полупроводниковых тензопреобразователей, соединенных по схеме моста, может составлять от одного до двух процентов на каждые 10с.
Наиболее близким по технической сущности к изобретению является тензометрическое устройство, содержащее последовательно соединенные тензомост, усилитель, аналого-цифровой преобразователь, первый сумматор, блок умножения, второй сумматор и регистратор, генератор тактовых импульсов, вход которого соединен со вторым входом аналого-цифрового преобразователя, первую линию задержки, вход которой соединен с выходом второго сумматора, а выход - с вторыми входами первого и второго сумматоров, последовательно соединенных первого квадратора и блока вычитания, вход первого квадратора соединен с выходом первого сумматора, последовательно соединенные вторую линию задержки, второй квадратор и второй блок умножения, последовательно соединенные третью линию задержки, третий блок умножения и третий сумматор, последовательно соединенные четвертый сумматор и блок деления [2].
В данном устройстве на погрешность измерения оказывают существенное влияние ошибки, обусловленные неточностью сглаживания измерительных шумов в информационном тракте. Измерительные шумы вызваны нестабильностью коэффициента передачи тензомоста. Измерительный шум сглаживается в данном устройстве, но при этом в устройстве используется априорная информация о статистических характеристиках измерительного шума. Эта априорная информация определяется экспериментально и как правило, содержит ошибки, которые, в свою очередь, вызывают погрешность сглаживания измерительного шума в устройстве. Получение этой экспериментальной информации также сопряжено с необходимостью использовать контрольно-измерительную аппаратуру, которая вносит свои ошибки в определение статистических характеристик.
Задача изобретения состоит в том, чтобы проводить сглаживание измерительного шума без использования априорной информации о статистических характеристиках измерительного шума.
Это решается тем, что предлагаемое тензометрическое устройство снабжено управляющим коммутатором, управляющий вход которого соединен с выходом блока вычитания, информационный вход - с выходом блока деления, выход управляющего коммутатора - с вторым входом первого блока умножения, выход первого квадратора - с вторым входом второго блока умножения и вторым входом блока деления, выход второго блока умножения соединен с первым входом четвертого сумматора, выход третьего сумматора - с вторым входом четвертого сумматора, выход третьей линии задержки соединен также с вторым входом третьего сумматора, выход четвертого сумматора соединен также с входом третьей линии задержки и вторым входом блока вычитания, выход блока деления соединен также с входом второй линии задержки, выход которой соединен также с вторым входом третьего блока умножения.
Технический результат, который может быть получен при осуществлении изобретения, заключается в том, что предлагаемая конструкция тензометрического устройства позволяет проводить сглаживание измерительного шума без использования априорной информации статистических характеристик измерительного шума.
Вновь введенные электрические связи позволяют сглаживать измерительные помехи без использования информации о дисперсии измерительного шума. Неточное определение дисперсии измерительного шума в прототипе вызывало появление погрешностей при сглаживании измерительного шума. Предлагаемое устройство не имеет этого недостатка за счет того, что не использует априорную информацию, а сглаживание осуществляется за счет использования информации, характеризующей статистические свойства измерительного шума, которая содержится в измерительном сигнале.
Точность работы предлагаемого устройства не зависит от выбора дисперсии измерительного шума, т.е. ошибки определения дисперсии измерительного шума не влияют на работу устройства.
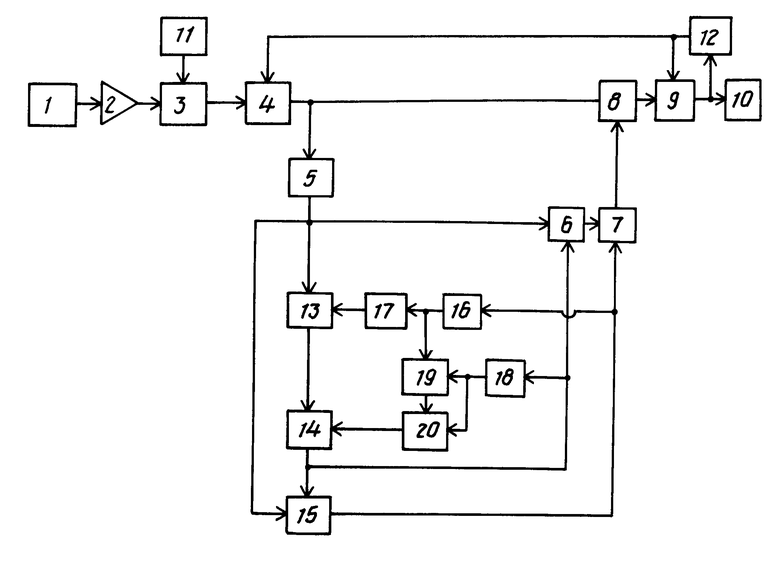
На чертеже представлена блок-схема тензометрического устройства.
Тензометрическое устройство содержит последовательно соединенные тензомост 1, усилитель 2, аналого-цифровой преобразователь (АЦП) 3, первый сумматор 4, первый квадратор 5, блок 6 вычитания, управляющий коммутатор 7, первый блок 8 умножения, второй сумматор 9, и регистратор 10, тактовый генератор 11, выход которого соединен с вторым входом аналого-цифрового преобразователя 3, первую линию 12 задержки, вход которой соединен с выходом второго сумматора 9, а выход - с вторыми входами первого сумматора 4 и второго сумматора 9, выход первого сумматора 4 соединен с вторым входом первого блока 8 умножения, последовательно соединенные второй блок 13 умножения, третий сумматор 14 и блок 15 деления, выход которого соединен с информационным входом управляющего коммутатора 7, последовательно соединенные вторую линию 16 задержки и второй квадратор 17, выход которого соединен с первым входом второго блока 13 умножения, выход первого квадратора 5 соединен с вторыми входами второго блока 13 умножения и блока 15 деления, выход которого соединен с входом второй линии 16 задержки; последовательно соединенные третью линию 18 задержки, третий блок 19 деления и четвертый сумматор 20, выход которого соединен с вторым входом третьего сумматора 14, выход последнего соединен с вторым входом блока 6 вычитания и входом третьей линии 18 задержки, выход которой соединен с вторым входом четвертого 20 сумматора, а выход второй линии 16 задержки - с вторым входом третьего блока 19 умножения.
Управляющий коммутатор 7 позволяет осуществлять управление процессом сглаживания информационного сигнала, а новые электрические связи обеспечивают определение "веса", с которым используется текущий измерительный сигнал при формировании информационного сигнала.
Устройство работает следующим образом.
В режиме измерения деформации на выходе тензомоста 1 формируется напряжение U1(t), которое поступает на вход усилителя 2. На выходе последнего формируется напряжение U2(t)=K[U1(t)], где K - коэффициент усиления усилителя 2. С выхода усилителя 2 сигнал поступает на вход АЦП 3, который по синхросигналу тактового генератора 11 производит выборку и кодирование поступающего сигнала.
С выхода АЦП 3 измерительный сигнал Zk=Xk+Uk, представляющий собой истинный сигнал Хk, искаженный помехой Vk, поступает в первый сумматор 4, где из него вычитается сигнал, пропорциональный оценке  истинного сигнала, полученный на предыдущем такте измерения.
истинного сигнала, полученный на предыдущем такте измерения.
На выходе первого сумматора 4 сигнал пропорционален обновляемой последовательности νk.
νk=Zk-
С выхода сумматора 4 сигнал поступает в квадратор 5, где умножает сам на себя. На выходе квадратора 5 сигнал пропорционален квадрату обновляемой последовательности νk2. Этот сигнал поступает в блок 6 вычитания, на второй вход второго блока 13 умножения и второй вход блока 15 деления. Во втором блоке 13 умножения сигнал умножается на сигнал с выхода второго квадратора 17, пропорциональный квадрату коэффициента Kk-12, с которым используется измерительный сигнал Zk-1 при формировании информационного сигнала  .
.
С выхода блока 13 умножения сигнал Kk-12 νk2 поступает в третий сумматор 14, где суммируется с сигналом с выхода четвертого сумматора 20, который пропорционален (Pk-1-Kk-1Pk-1). На выходе третьего сумматора 14 сигнал пропорционален априорной дисперсии ошибки оценивания Рk/k-1.
Pk/k-1=Pk-1-Kk-1˙ Pk-1+Kk-12 νk2
В блоке 15 деления производится деление сигнала, пропорционального Рk/k-1, на сигнал с первого квадратора 5. На выходе блока 15 деления сигнал, пропорционален коэффициенту Kk
Kk=Pk/k-1/ νk2
Этот сигнал поступает на информационный вход управляющего коммутатора 7 и на вход второй линии 16 задержки.
С выхода второй линии 16 задержки сигнал, пропорциональный Kk-1, поступает на вход второго квадратора 17 и на вход третьего блока 19 умножения. С выхода третьего сумматора 14 сигнал поступает также на второй вход блока 6 вычитания и вход третьей линии 18 задержки, с выхода которой сигнал, пропорциональный Pk-1, поступает в четвертый сумматор 20 и третий блок 19 умножения.
В блоке 19 умножения умножаются сигналы со второй линии 16 задержки и третьей линии 18 задержки. На выходе блока 19 умножения сигнал пропорционален (Kk-1Pk-1). Этот сигнал суммируется в четвертом сумматоре 20 с сигналом с третьей линии 18 задержки, в результате получается сигнал, пропорциональный (Pk-1-Kk-1Pk-1), который поступает в третий сумматор 14 для формирования априорной дисперсии ошибки оценивания Pk/k-1.
Сигнал, пропорциональный Pk/k-1, вычитается в блоке 6 вычитания из сигнала с первого квадратора 5. На выходе блока 6 вычитания сигнал пропорционален разности ( νk2-Pk/k-1). Этот сигнал является управляющим сигналом для управляющего коммутатора 7. Если этот сигнал больше нуля, то сигнал с блока 15 деления проходит через управляющий коммутатор 7 и поступает на первый вход первого блока 8 умножения. Если сигнал с выхода блока 6 вычитания меньше нуля, то сигнал с блока 15 деления не проходит через управляющий коммутатор 7. Управляющий коммутатор 7 заблокирован.
Таким образом, заблокирование управляющего коммутатора 7 проводится в случае, когда измерения Zk содержат большие помехи Vk, т.е. содержат мало достоверной информации о сигнале Хk. И на основе этого Zk нельзя формировать оценку  .
.
В случае, когда сигнал, пропорциональный весовому коэффициенту Kkпоступает в блок 8 умножения, производится умножение его на сигнал с первого сумматора 4, пропорциональный обновляемой последовательности νk. С выхода первого блока 8 умножения сигнал, пропорциональный Kk νk, поступает во второй сумматор 9. На второй вход сумматора 9 поступает сигнал с первой линии 12 задержки, пропорциональный  . На выходе второго сумматора 9 сигнал пропорционален оценке информационного сигнала
. На выходе второго сумматора 9 сигнал пропорционален оценке информационного сигнала  .
.
 =
= +Kкνк,.
+Kкνк,.
Этот сигнал поступает в регистратор 10 и в первую линию 12 задержки, в которой сигнал задерживается на один такт работы устройства, а затем поступает на вторые входы первого и второго сумматоров 4 и 9.
Таким образом, предлагаемое тензометрическое устройство позволяет получить более достоверную информацию. Измеряемая информация искажена помехами, обусловленными неточно заданной дисперсией измерительного шума. В предложенном устройстве за счет адаптивного сглаживания повышается точность тензометрического устройства без использования априорной информации о дисперсии измерительных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тензометрическое устройство | 1991 |
|
SU1796890A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| СЕЛЕКТИВНЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2014 |
|
RU2561252C1 |
| Вычислительное устройство дляизМЕРЕНия ХАРАКТЕРиСТиК фОТОгРАфи-чЕСКиХ СиСТЕМ | 1978 |
|
SU805326A1 |
| Устройство для измерения износа и положения режущего инструмента в токарных станках | 1990 |
|
SU1757847A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2014 |
|
RU2565345C2 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧ НЕЛИНЕЙНОГО СТОХАСТИЧЕСКОГО ПРОГРАММИРОВАНИЯ | 1991 |
|
RU2006933C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ | 1999 |
|
RU2159958C1 |
| Способ определения суммарных потерь мощности в регулируемой высоковольтной линии электропередачи | 1986 |
|
SU1422169A1 |
| Устройство для определения моментов изменения свойств случайного процесса | 1985 |
|
SU1282159A1 |
Изобретение относится к измерительной технике и может быть использованно для измерения неэлектрических величин, например деформаций и усилий. Изобретение позволяет производить сглаживание измерительного шума без использования априорной информации о статических характеристиках измерительного шума. Измерительный сигнал с выхода АЦП используется для формирования "весового" коэффициента усиления. В зависимости от уровня измерительного шума управляющий коммутатор пропускает сигнал, пропорциональный "весовому" коэффициенту, в цепь формирования оценки информационного сигнала, который формируется с помощью измерительного сигнала с вышеопределенным "весом". 1 ил.
ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО, содержащее последовательно соединенные тензомост, усилитель, аналого-цифровой преобразователь, первый сумматор, первый блок умножения, второй сумматор и регистратор, генератор тактовых импульсов, выход которого соединен с вторым входом аналого-цифрового преобразователя, первую линию задержки, вход которой соединен с выходом второго сумматора, а выход - с вторыми входами первого и второго сумматоров, последовательно соединенные первые квадратор, вход которого соединен с выходом первого сумматора, и блок вычитания, последовательно соединенные вторую линию задержки, второй квадратор и второй блок умножения, последовательно соединенные третью линию задержки, третий блок умножения и третий сумматор и последовательно соединенные четвертый сумматор и блок деления, отличающееся тем, что оно снабжено управляющим коммутатором, управляющий вход которого соединен с выходом блока вычитания , информационный вход - с выходом блока деления, а выход - с вторым входом первого блока умножения, выход первого квадратора соединен с вторым входом второго блока умножения и вторым входом блока деления, выход второго блока умножения соединен с первым входом четвертого сумматора, выход третьего сумматора соединен с вторым входом четвертого сумматора, выход третьей линии задержки соединен с вторым входом третьего сумматора, выход четвертого сумматора соединен с входом третьего сумматора, выход четвертого сумматора соединен с входом третьей линии задержки и с вторым входом блока вычитания, а выход блока деления соединен с входом второй линии задержки, выход которой соединен с вторым входом третьего блока умножения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тензометрическое устройство | 1991 |
|
SU1796890A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
