Изобретение относится к области управления системами навигации и ориентации, в частности к коррекции их погрешностей, численных критериев степени наблюдаемости навигационных комплексов (НК) с инерциальной навигационной системой (ИНС).
Известен навигационный комплекс (НК), включающий ИНС с одним входом и одним выходом, допплеровский измеритель скорости и угла сноса (ДИСС) с одним выходом, сумматор, имеющий два входа и один выход, блок оценивания и регулятор, при этом выход ИНС соединен с первым входом первого сумматора, а выход ДИСС соединен со вторым входом первого сумматора, выход которого соединен с входом блока оценивания, выполненного в виде фильтра Калмана, выход блока оценивания соединен со входом регулятора, выход которого соединен со входом ИНС (см. Неусыпин К.А. Современные системы и методы наведения, навигации и управления летательными аппаратами. Изд. МГОУ, 2009. - 500 с. ИНС представляет собой серийную грубую ИНС типа Ц-060К стр.91; блок оценивания выполнен в виде фильтра Калмана, блок-схема которого представлена на стр.156, а уравнения - на стр.158-159).
Сигнал ДИСС поступает на второй вход первого сумматора, где вычитается из сигнала, поступившего с ИНС на первый вход первого сумматора, после чего с выхода первого сумматора сигнал, пропорциональный сумме ошибок ИНС и ДИСС, поступает на вход блока оценивания, где вычисляется оценка ошибок ИНС и подавляется ошибка ДИСС. С выхода блока оценивания сигнал, пропорциональный оценке ошибок ИНС, поступает на вход регулятора, где вырабатывается управляющий сигнал, который поступает на вход ИНС. На выходе ИНС сигнал равен истинной навигационной информации с ошибкой регулирования.
Недостатком известного НК является то, что в полете параметры, используемые в фильтре Калмана, изменяются неизвестным образом (достоверная информация отсутствует), что приводит к увеличению ошибок оценивания и снижению точности регулирования, с течением времени углы отклонения ГСП увеличиваются и ошибка ИНС нарастает.
Задачей изобретения является повышение точности измерений ИНС, повышение надежности работы на длительных интервалах времени.
Техническим результатом является уменьшение углов отклонения гиростабилизированной платформы (ГСП) ИНС за счет формирования сигналов коррекции в структуре ИНС и повышения степени наблюдаемости погрешностей ИНС.
Указанные задача и технический результат достигаются навигационным комплексом, включающим ИНС с одним входом и одним выходом, допплеровский измеритель скорости и угла сноса (ДИСС) с одним выходом, сумматор, имеющий два входа и один выход, блок оценивания и регулятор, при этом выход ИНС соединен с первым входом первого сумматора, а выход ДИСС соединен со вторым входом первого сумматора, выход которого соединен с входом блока оценивания, выполненного в виде фильтра Калмана, выход блока оценивания соединен со входом регулятора, выход которого соединен со входом ИНС, при этом навигационный комплекс снабжен вторым блоком оценивания, блоком осреднения, блоком сравнения, коммутатором управления и вторым регулятором, причем выход первого сумматора соединен также с входом второго блока оценивания, первый вход первого блока оценивания соединен с входом блока осреднения, выход блока осреднения соединен с первым входом блока сравнения, выход которого соединен с первым входом коммутатора, второй выход первого блока оценивания соединен со входом первого регулятора, выход которого соединен со вторым входом коммутатора, первый выход второго блока оценивания соединен со вторым входом блока сравнения, второй выход второго блока оценивания соединен со входом второго регулятора, выход которого соединен с третьим входом коммутатора, выход которого соединен с входом ИНС.
А также тем, что во втором блоке оценивания используется матрица модели с шагом вычисления 3Т.
А также тем, что во втором регуляторе использована матрица усиления с шагом вычисления 3Т.
На фиг.1 показана схема патентуемого НК.
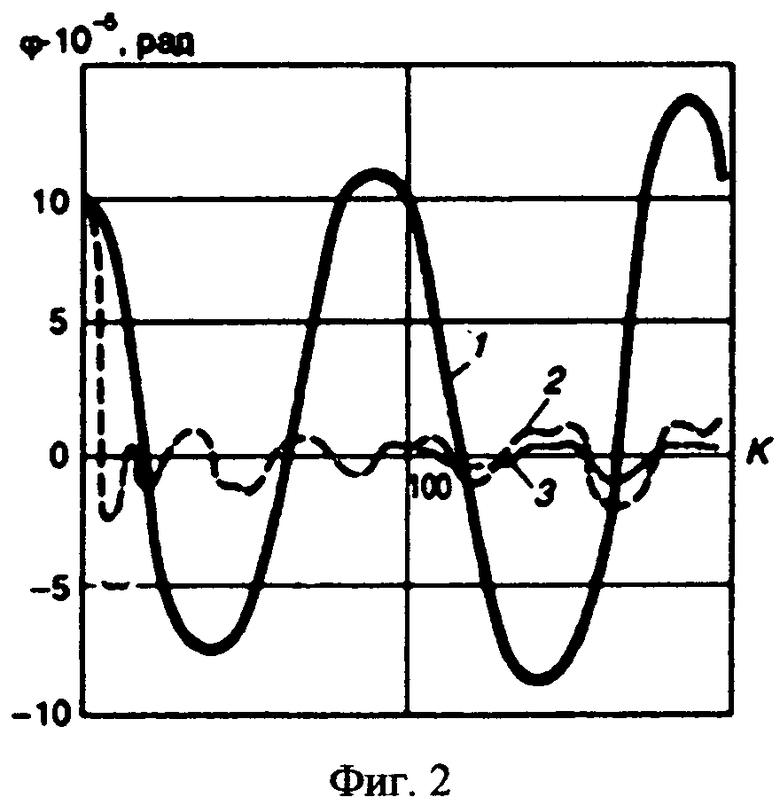
На фиг.2 показаны углы отклонения ГСП ИНС.
Навигационный комплекс включает ИНС 1 с одним входом 2 и одним выходом 3, ДИСС 4 с одним выходом 5, первый сумматор 6, который имеет два входа - первый 7 и второй 8, и один выход 9, при этом выход 3 ИНС 1 соединен с первым входом 7 сумматора 6, а выход 5 ДИСС 4 соединен со вторым входом 8 первого сумматора 6. НК имеет первый 10 и второй 11 блоки оценивания, блок осреднения 12, блок сравнения 13, первый регулятор 14, второй регулятор 15 и коммутатор 16. Выход 9 первого сумматора 6 соединен с входом 17 первого блока оценивания 10 и с входом 18 второго блока оценивания 11, первый выход 19 первого блока оценивания 10 соединен с входом 20 блока осреднения 12, выход 21 которого соединен с первым входом 22 блока сравнения 13, первый выход 23 второго блока оценивания 11 соединен со вторым входом 24 блока сравнения 13. Выход 25 блока сравнения 13 соединен с первым входом 29 коммутатора 16, второй выход 26 блока оценивания 10 соединен с входом 27 первого регулятора 14, выход 28 которого соединен со вторым входом 30 коммутатора 16, второй выход 31 второго блока оценивания 11 соединен с входом 32 второго регулятора 15, выход 33 которого соединен с третьим входом 34 коммутатора 16. Выход 35 коммутатора 16 соединен с входом 2 ИНС 1, выход 3 ИНС 1 является выходом НК.
Блоки оценивания выполнены в виде фильтра Калмана.
(Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. М.: Машиностроение, 1982, 215 с.).
Уравнения ошибок ИНС имеют вид:

Ф - матрица модели; x - вектор состояния - включает ошибки ИНС, W - вектор входного шума.
Часть вектора состояния измеряется:

Здесь zk+1 - m-вектор измерений; Vk+1 - m-вектор ошибок измерения; Hk+1, k - (m×n) - матрица измерений.
В фильтре Калмана Rk+1 - ковариационная матрица измерительного шума V, Q - ковариационная матрица входного шума w, Kk+1 - матрица усиления фильтра,
 .
.
Фильтр Калмана имеет вид:
Здесь P(k+1)/k - априорная ковариационная матрица ошибок оценивания; Pk+1 - апостериорная ковариационная матрица ошибок оценивания. При помощи фильтра Калмана осуществляется восстановление всего вектора состояния системы и подавляется влияние измерительного шума.
На втором выходе 26 первого блока оценивания 10 (первого фильтра Калмана) и втором выходе 31 второго блока оценивания 11 (второго фильтра Калмана) сигналы пропорциональны оценке ошибки ИНС в определении скорости и угла отклонения ГСП, на первых выходах 19 и 23 указанных блоков оценивания 10 и 11 сигналы пропорциональны дисперсиям ошибок оценивания угла отклонения ГСП.
Блок осреднения 12 выполнен в виде сумматора выборки 3-х сигналов и делителя на 3, представляет собой логическую схему (например, сумматор-счетчик и 555Е5 и делитель-триггер), осуществляет определение среднего значения дисперсии ошибок оценивания угла отклонения ГСП на интервале 3Т.
Блок сравнения выполнен в виде компаратора 561СА3, осуществляет сравнение дисперсий ошибок оценивания угла отклонения ГСП ИНС на интервале 3Т. Если сумма дисперсий ошибок оценивания первого фильтра Калмана меньше ошибок оценивания второго фильтра Калмана, то сигнал с выхода 25 блока сравнения 13 поступает на коммутатор 16, где замыкает цепь с выхода первого регулятора 14 через второй вход 30 коммутатора 16 на выход 35, и сигнал, пропорциональный оценке ошибок ИНС с шагом Т, поступает на вход 2 ИНС 1, если сумма дисперсий ошибок оценивания первого фильтра Калмана 10 больше, чем у второго фильтра Калмана 11, то сигнал на выходе 25 отсутствует и в коммутаторе 16 остается замкнутой цепь с выхода 33 второго регулятора 15 через третий вход 34 на выход 35 коммутатора 16, и сигнал, пропорциональный оценке ошибок ИНС с шагом 3Т, поступает на вход 2 ИНС 1.
Регуляторы 14 и 15 выполнены в виде матричных усилителей, каждый из которых представляет собой операционный усилитель с обратной связью, величина отношения сопротивления линии обратной связи и входного сопротивления представляет собой матричный коэффициент усиления (т.е. подбирая сопротивление в цепи обратной связи задается матрица коэффициентов усиления, которые подбираются в соответствии с выражением для Ki из формулы (10).
Патентуемый НК работает следующим образом.
Критерий степени наблюдаемости имеет вид (Неусыпин К.А., Пролетарский А.В., Цибизова Т.Ю. Системы управления летательными аппаратами и алгоритмы обработки информации. М.: изд. МГОУ, 2006):

Здесь М[(xi)2] - дисперсия произвольной i-й компоненты вектора состояния;
М[(yi)2] - дисперсия непосредственно измеряемого вектора состояния.
В критерии степени наблюдаемости (4) мерой наблюдаемости является скаляр. Эта особенность выгодно отличает предложенные критерии от известных, так как позволяет проводить сравнение степеней наблюдаемости компонент различных векторов состояния.
Уравнения ошибок системы инерциальной навигации имеют вид (Салычев О.С. Скалярное оценивание многомерных динамических систем. Машиностроение, 1987, 216 с.):
где δVk - ошибка ИНС в определении скорости; εk - скорость дрейфа ГСП; φk - угол отклонения ГСП относительно сопровождающего трехгранника.
Составим вектор измерений в виде:

где 
Тогда для непосредственного измерения компонент вектора состояния получим следующие уравнения:

Определим дисперсию приведенного к углу отклонения ГСП относительно сопровождающего трехгранника измерительного шума:
где r - дисперсия ошибки в измерении скорости, которая подлежит непосредственному измерению с помощью внешней информации.
В соответствии с выражением (4) определим степень наблюдаемости угла отклонения ГСП относительно сопровождающего трехгранника:
Подставим численные значения параметров, полученные в результате полунатурного эксперимента с реальной ИНС. Ошибка ИНС в определении скорости равна 60 м/мин, угол отклонения платформы относительного сопровождающего трехгранника -2.10-4 рад., период дискретизации выбран равным 1 минуте. В результате получим, что степень наблюдаемости угла отклонения ГСП относительно сопровождающего трехгранника равна 0,01.
Полученное значение степени наблюдаемости имеет четкий физический смысл. Относительная погрешность оценивания наблюдаемой компоненты вектора состояния по отношению к оцениваемому номиналу в случае оценивания угла отклонения будет такая же, как и относительная погрешность оценивания непосредственно измеряемой компоненты через 100 минут.
Предложенный критерий степени наблюдаемости позволяет определить количественную оценку наблюдаемости каждой компоненты вектора состояния систем, что в практических приложениях дает возможность выбрать оптимальные параметры приведенных измерений в ПК. При использовании шага вычислений, равного 3Т, степень наблюдаемости угла отклонения ГСП увеличивается и будет равна 0,09 (вместо 0,01 при Т).
Выбранное значение шага вычислений 3Т обосновано тем, что в практических приложениях на большем шаге коррекции ошибки ИНС достигают существенных величин, искажая истинную навигационную информацию ЛА. Таким образом, из практических соображений выбран максимальный приемлемый шаг вычислений, позволяющий повысить степень наблюдаемости угла отклонения ГСП.
При оценивании ошибок ИНС индикатором точности оценивания фильтра Калмана является Pk,k-1 - априорная ковариационная матрица ошибок оценивания фильтра Калмана.
Уравнения ошибок ИНС при коррекции в структуре системы имеют вид:
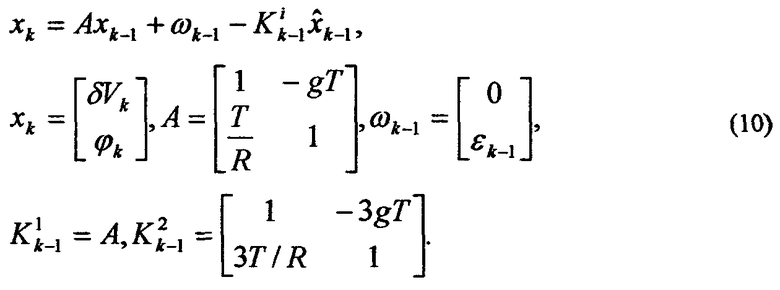
δVk - ошибка ИНС в определении скорости, φk - угол отклонения ГСП относительно плоскости горизонта, g - ускорение силы тяжести, R - радиус Земли, Т - период дискретизации, εk-1 - скорость дрейфа ГСП, представляющая собой стационарный случайный процесс с экспоненциальной корреляционной функцией,  - матрица регулятора,
- матрица регулятора,  - матрица первого регулятора,
- матрица первого регулятора,  - матрица второго регулятора. В первом блоке оценивания 10 использована матрица K1, а во втором блоке оценивания 11 использована матрица K2 (с периодом 3Т).
- матрица второго регулятора. В первом блоке оценивания 10 использована матрица K1, а во втором блоке оценивания 11 использована матрица K2 (с периодом 3Т).
Эффект предложенного устройства продемонстрирован методом математического моделирования. При моделировании ошибок ИНС с 100 шага вычислений проводилось увеличение уровня измерительного шума в 2 раза, при этом ошибка оценивания увеличивается и происходит переключение коммутатора 16 - на вход 2 ИНС поступает корректирующий сигнал с первого регулятора 14. До 100 шага корректирующий сигнал поступал со второго регулятора 15. На фиг.2 введены обозначения: 1 - угол отклонения автономной ГСП ИНС; 2 - угол отклонения ГСП ИНС с первым регулятором; 3 - угол отклонения ГСП ИНС со вторым регулятором.
Сигнал с выхода 3 ИНС 1, пропорциональный истинной информации о навигационных параметрах ЛА с ошибкой ИНС (в определении скорости и угла отклонения ГСП), поступает в первый вход 7 сумматора 6, на второй вход 8 которого поступает сигнал с выхода 5 ДИСС 4, пропорциональный истинной навигационной информации с ошибкой ДИСС. С выхода 9 сумматора 6 сигнал, пропорциональный смеси ошибок ИНС и ДИСС zk+1, поступает на вход 17 блока оценивания 10, где вычисляются дисперсия ошибок оценивания угла отклонения ГСП, поступающая с первого выхода 19 первого блока оценивания 10 на вход 20 блока осреднения 12, а также оценка ошибок ИНС в определении скорости и оценка угла отклонения ГСП, которая со второго выхода 26 первого блока оценивания 10 поступает на вход 27 первого регулятора 14.
С выхода 9 сумматора 6 сигнал также поступает на вход 18 второго блока оценивания 11 (второго фильтра Калмана), где вычисляется дисперсия ошибок оценивания Р, которая с первого выхода 23 поступает на второй вход 24 блока сравнения 13, а также вычисляется оценка ошибок в определении скорости и угла отклонения ГСП, которые со второго выхода 31 поступают на вход 32 второго регулятора 15. Во втором блоке оценивания 11 (втором фильтре Калмана) использована модель ошибок ИНС с шагом вычисления 3Т, во втором регуляторе 15 использована матрица регулятора вида K2 (см. формулу (10)).
С первого выхода 19 первого блока оценивания 10 (первого фильтра Калмана) сигнал поступает в блок осреднения 12, пропорциональный дисперсии ошибки оценивания угла отклонения ГСП, где осредняется на интервале 3Т. Сигнал с выхода 21 блока осреднения 12 поступает на первый вход 22 блока сравнения 13, на второй вход 24 которого поступает сигнал с первого выхода 23 второго блока оценивания 11 (второго фильтра Калмана). В блоке сравнения 13 осуществляется сравнение двух поступивших сигналов, и если сигнал с первого входа 22 больше сигнала со второго входа 24, что означает снижение точности оценивания первым блоком оценивания 10 (первым фильтром Калмана), то на выходе 25 нулевой сигнал. При появлении на первом входе 29 коммутатора 16 нулевого сигнала, с выхода 33 второго регулятора 15 сигнал, пропорциональный сигналу коррекции - Ах, через коммутатор 16 поступает на вход 2 ИНС 1. Если сигнал с первого входа 22 меньше сигнала со второго входа 24 блока сравнения 13, то на выходе 25 появляется управляющий сигнал, который поступает на первый вход 29 коммутатора 16 и замыкает цепь для прохождения сигнала коррекции - Фх с первого регулятора 14 через второй вход 30 и выход 35 коммутатора 16 на вход 2 ИНС 1.
Тем самым компенсируется ошибка в определении угла отклонения ГСП.
На выходе 3 ИНС 1 сигнал пропорционален информации о навигационных параметрах летательного аппарата (ЛА) со скомпенсированными ошибками в определении угла отклонения ГСП от плоскости горизонта, что приводит к увеличению точности навигационной информации ЛА. В отличие от прототипа при увеличении ошибок оценивания и, как следствие, ошибок компенсации погрешностей ИНС осуществляется коррекция с помощью второго блока оценивания 11 (второго фильтра Калмана) и второго регулятора 15, включающих модели с увеличенной степенью наблюдаемости, что приводит к повышению точности ИНС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЕКТИВНЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2014 |
|
RU2561252C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2014 |
|
RU2568168C2 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
Изобретение относится к области управления системами навигации и ориентации, в частности к блокам коррекции погрешностей численных критериев степени наблюдаемости навигационных комплексов (НК) с инерциальной навигационной системой (ИНС). Технический результат - повышение точности. Для этого навигационный комплекс включает ИНС с одним входом и одним выходом, допплеровский измеритель скорости и угла сноса (ДИСС) с одним выходом, сумматор, имеющий первый и второй входы и один выход, блок оценивания и регулятор. Выход ИНС соединен с первым входом сумматора, а выход ДИСС соединен со вторым входом сумматора, выход которого соединен с входом блока оценивания, выполненного в виде фильтра Калмана. Выход блока оценивания соединен с входом регулятора. Навигационный комплекс снабжен вторым блоком оценивания, выполненным в виде фильтра Калмана, блоком осреднения, блоком сравнения, коммутатором и вторым регулятором. При этом выход сумматора соединен с входом второго блока оценивания, а первый выход первого блока оценивания соединен с входом блока осреднения, выход которого соединен с первым входом блока сравнения, выход которого соединен с первым входом коммутатора. 2 з.п. ф-лы, 2 ил.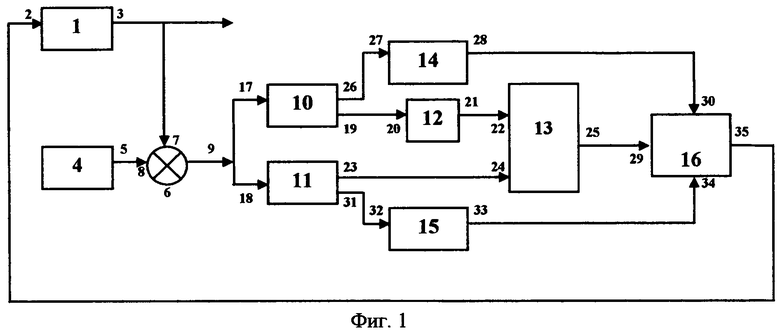
1. Навигационный комплекс, включающий инерциальную навигационную систему (ИНС) с одним входом и одним выходом, допплеровский измеритель скорости и угла сноса (ДИСС) с одним выходом, сумматор, имеющий первый и второй входы и один выход, блок оценивания и регулятор, при этом выход ИНС соединен с первым входом сумматора, а выход ДИСС соединен со вторым входом сумматора, выход которого соединен с входом блока оценивания, выполненного в виде фильтра Калмана, выход блока оценивания соединен с входом регулятора, отличающийся тем, что он снабжен вторым блоком оценивания, выполненного в виде фильтра Калмана, блоком осреднения, блоком сравнения, коммутатором и вторым регулятором, причем выход сумматора соединен также с входом второго блока оценивания, первый выход первого блока оценивания соединен с входом блока осреднения, выход которого соединен с первым входом блока сравнения, выход которого соединен с первым входом коммутатора, второй выход первого блока оценивания соединен со входом первого регулятора, выход которого соединен со вторым входом коммутатора, первый выход второго блока оценивания соединен со вторым входом блока сравнения, второй выход второго блока оценивания соединен со входом второго регулятора, выход которого соединен с третьим входом коммутатора, выход которого соединен с входом ИНС.
2. Навигационный комплекс по п.1, отличающийся тем, что во втором блоке оценивания использована модель ошибок ИНС с шагом вычисления 3Т.
3. Навигационный комплекс по п.1, отличающийся тем, что во втором регуляторе использована матрица регулятора с шагом вычисления 3Т.
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| НЕУСЫПИН К.А | |||
| Современные системы и методы наведения, навигации и управления летательными аппаратами | |||
| Изд | |||
| МГОУ, 2009, с.91; 156, 158-159 | |||
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |

