Изобретение относится к авиации, в частности к механизмам ручного управления режимами работы двигателей самолетов.
Известно устройство ручного управления прямой тягой двигателя, содержащее рычаг управления прямой тягой, шарнирно соединенный с дополнительной тягой, которая кинематически связана с двигателем (Руководство по технической эксплуатации, 1990, изд.70, разд.76, с.7-8, фиг.3).
Однако такое устройство не позволяет точно выдерживать режим полета из-за значительной длины трассы, люфтов и вытяжки тросов системы управления двигателями.
Известно устройство ручного управления механизмами прямой и реверсивной тяги двигателя, содержащее рычаг управления прямой тягой, рычаг реверса, шарнирно закрепленный на рычаге управления прямой тягой, на оси которого шарнирно закреплена качалка, соединенная тягой с рычагом реверса и с дополнительной тягой, другой конец которой шарнирно связан с управляющим роликом, установленным на оси кронштейна и кинематически связанным с двигателем (Волобуев С. П. Крылатый сверхгрузовик Ан-124. - Крылья Родины, 1986, N 2, с.24-25).
Такое устройство позволяет управлять обратной тягой при посадке самолета, но не позволяет применять это устройство при заправке топливом в воздухе, так как заправляемый самолет находится в струях газов двигателей самолета заправщика, что отрицательно сказывается на работе двигателей на максимальных режимах.
Цель изобретения - расширение функциональных возможностей и улучшение условий эксплуатации при заправке топливом в полете.
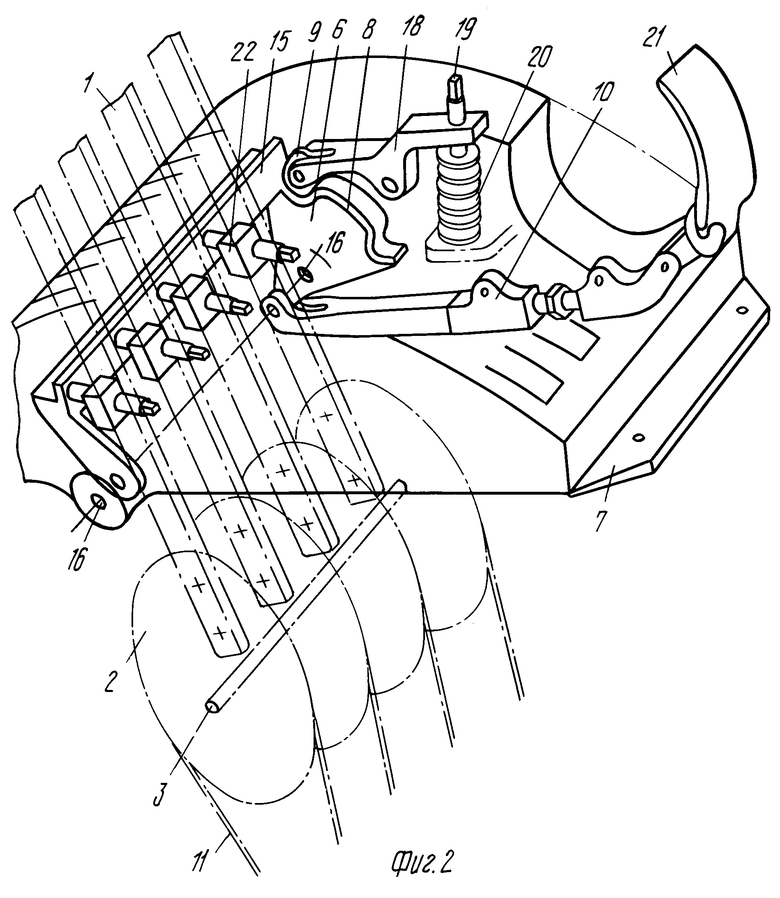
На фиг.1 изображено устройство для ручного управления тягой двигателя; на фиг.2 - устройство в режиме заправки с откидным упором в положении "Упор установлен" в изометрии.
Устройство для ручного управления тягой двигателя содержит рычаг 1 управления тягой двигателя, закрепленной на ролике 2, который шарнирно установлен на оси 3 и кинематически связан с поводком 4 управления тягой двигателя 5, поворотный приводной сектор 6, смонтированный на кронштейне 7 и снабженный профилированной торцовой поверхностью 8, контактирующей с подпружиненным роликом 9, и тягу 10 привода, один конец которого шарнирно связан с сектором 6.
Кинематическая связь содержит тросы 11, ролики 12, тяги 13, качалки 14.
Поворотный приводной сектор 6 с профилированной торцовой поверхностью 8 жестко соединен с упором 15, выполненным в виде П-обрзаной планки, шарнирно закрепленной на оси 16 поворотного приводного сектора 6 с возможностью совместного поворота и фиксации в лунках 17 в крайних положениях упора 15 в плоскости поворота сектора 6. Имеется качалка 18, один конец которой снабжен роликом 9, а другой - регулируемым винтом 19, который упирается в пружину 20. Противоположный конец тяги 10 привода шарнирно соединен с дополнительным рычагом 21, установленным на кронштейне 7. При этом на рычаге 1 управления тягой смонтирован регулируемый упор 22, контактирующий с перемычкой П-образной планки упора 15.
Устройство для ручного управления тягой двигателя работает следующим образом.
При сближении с самолетом-заправщиком правый летчик заправляемого самолета на своем пульте переводит рычаг 21 в положение "Упор установлен". При этом тяга 10, связанная с рычагом 21, устанавливает сектор 6 с упором 15 в верхнее положение и при помощи подпружиненного ролика 9, западающего в лунку 17 профилированной поверхности 8 сектора, фиксирует упор 15 в этом положении.
В дальнейшем правый летчик выдерживает необходимую скорость заправки путем перемещения рычага 1 управления тягой двигателя 5, который не может выйти за пределы этого упора, ограничивающего выход на максимальный режим, так как рычаг 1 упирается регулируемым упором 22 в перемычку П-образной планки упора 15.
После заправки упор 15 убирается в крайнее нижнее положение путем установки дополнительного рычага 21 в положение "Упор снят".
Упор 15 можно снять также приложением дополнительной силы к рычагам 1, при этом дополнительный рычаг 21 автоматически встает. Это сделано для возможных экстремальных ситуаций, когда надо быстро выйти на максимальный режим. В положении "Упор снят" дополнительный рычаг 21 и сектор 6 с упором 15 также фиксируются подпружиненным роликом 9, западающим в лунку 17 с другой стороны сектора 6.
Усилие снятия или установки упора 15 регулируется винтом 19, обжимающим пружину 20.
Регулировка упоров 22 осуществляется на земле при работающих двигателях следующим образом.
При регулировке винты регулируемого упора 22 выворачиваются так, чтобы опорный конец винта со стороны упора 15 не выходил за пределы торцовой поверхности рычага 1.
Дополнительный рычаг 21 устанавливается в положение "Упор установлен".
Каждый рычаг 1 поочередно устанавливается в положение по прибору на режим номинальной тяги, удерживается в этом положении, а винт регулируемого упора 22 подводится до соприкосновения с перемычкой П-образной планки упора 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПРЯМОЙ И РЕВЕРСИВНОЙ ТЯГИ ДВИГАТЕЛЯ | 1989 |
|
RU2031814C1 |
| РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2018459C1 |
| КРЕСЛО | 1995 |
|
RU2136517C1 |
| Система электродистанционного управления самолетом | 1991 |
|
SU1819803A1 |
| ПРЯМОТОЧНЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
SU1834198A1 |
| ТРОСОВАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ | 1991 |
|
RU2015076C1 |
| Устройство для управления тягой двигателя самолета | 2021 |
|
RU2790341C2 |
| ПРЯМОТОЧНЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2104227C1 |
| РАЗЪЕМНОЕ УСТРОЙСТВО ДЛЯ ЗАПРАВКИ КРИОГЕННЫМ ТОПЛИВОМ | 1991 |
|
RU2042582C1 |
| САМОЛЕТ | 1994 |
|
RU2107011C1 |
Изобретение относится к авиационной технике, в частности к механизмам ручного управления режимами работы двигателей самолетов. Целью изобретения является расширение функциональных возможностей и улучшение условий эксплуатации при заправке топлива в полете. Устройство содержит рычаг 1 управления тягой двигателя, который кинематически связан с поводком 4 управления двигателем 5. Поворотный приводной сектор 6, смонтированный на кронштейне 7, снабжен профилированной торцовой поверхностью 8, контактирующей с подпружиненным роликом 9. Поворотный приводной сектор 6 жестко соединен с упором 15, выполненным в виде П-образной планки, шарнирно закрепленной на оси 16 поворотного приводного сектора 6 с возможностью совместного поворота и фиксации в лунках 17 в крайних положениях. При сближении с самолетом-заправщиком правый летчик переводит рычаг 21 в положение "Упор установлен". В этом случае тяга 10 устанавливает сектор 6 с упором 15 в верхнее положение и при помощи подпружиненного ролика 9, западающего в лунку 17, фиксирует упор 15 в этом положении. Необходимая скорость полета при заправке выдерживается перемещением рычага 1 управления тягой двигателя 5, который не может выйти за пределы этого упора. Таким образом, двигатель не может быть выведен на максимальный режим. 2 ил.
УСТРОЙСТВО ДЛЯ РУЧНОГО УПРАВЛЕНИЯ ТЯГОЙ ДВИГАТЕЛЯ, содержащее рычаг управления прямой тягой двигателя, закрепленный на ролике, шарнирно установленном на оси и кинематически связанном с поводком управления тягой двигателя, поворотный приводной сектор с осью, смонтированный на кронштейне и снабженный профилированной торцевой поверхностью, контактирующей с подпружиненным роликом, и тягу привода, один конец которой шарнирно связан с поворотным приводным сектором, отличающееся тем, что, с целью расширения функциональных возможностей и улучшения условий эксплуатации при заправке топлива в полете, оно снабжено поворотной упорной П-образной планкой, регулируемым упором на рычаге управления прямой тягой двигателя и дополнительным рычагом, установленным на кронштейне, при этом поворотная упорная П-образная планка шарнирно закреплена не оси поворотного приводного сектора с возможностью совместного с ним поворота и фиксации в крайних положениях, а регулируемый упор при заправке взаимодействует с поворотной упорной П-образной планкой, причем второй конец тяги привода поворотного сектора шарнирно соединен с дополнительным рычагом.
| Волобуев С.П | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
| - Крылья родины, 1986, N 2, с.24-25. | |||
