Изобретение относится к авиационной технике, в частности, к системам формирования управляющих сигналов в электродистанционных системах управления самолетом.
Целью изобретения является устранение перечисленных недостатков и повышение точности управления и безопасности полета путем коррекции сигнала перекрестной связи от ручки управления в канал поворотного киля.
Для обеспечения этой цели предложена система электродистанционного управления самолетом, отличительной особенностью которой является то, что она снабжена последовательно соединенными датчиком положения закрылков, первым ключом и блоком-усилителем с переменным коэффициентом усиления, последовательно соединенными датчиком стреловидности крыла и вторым ключом, размыкающие контакты которого связывают выход блока усилителя с переменным коэффициентом усиления с входом апериодического звена, выход которого подключен к первому входу сумматора, второй вход которого подключен к выходу блока формирования сигнала отклонения поворотного киля, третий вход связан с демпфером рыскания, а выход - с приводом поворотного киля, при этом второй вход блока-усилителя с переменным коэффициентом усиления связан с выходом датчика положения рычага управления по крену, а выход блока формирования сигнала.отклонения поворотного киля подсоединен к выходу датчика положения рычага управления по курсу.
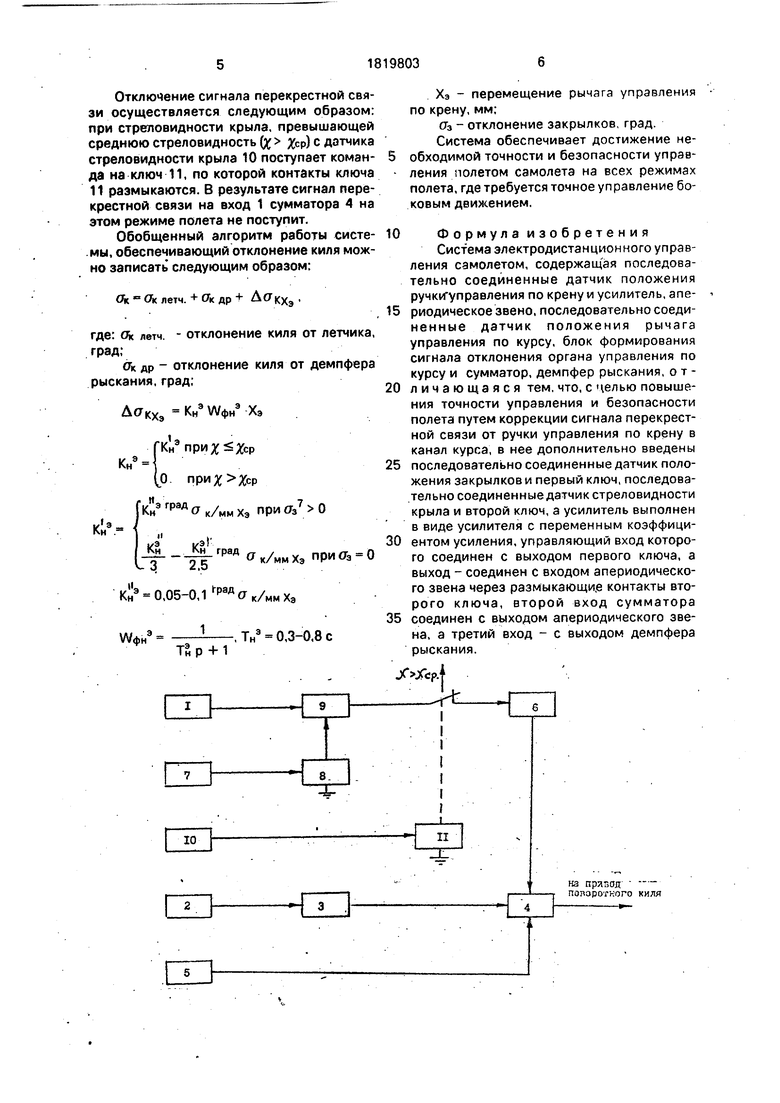
На чертеже показана блок-схема системы:
Система содержит датчик положения 1 рычага управления по крену, датчик положения 2 рычага управления по курсу, блок 3 формирования сигнала отклонения органа управления по курсу, сумматор 4, демпфер рыскания 5, апериодическое звено 6, датчик 7 положения закрылков, первый ключ 8, усилитель 9 с переменным коэффициентом усиления, датчик 10 стреловидности крыла.
Ј
00
ю
00
о
00
второй ключ 11, размыкающие контакты которого связывают выход усилителя 9 с входом апериодического звена 6, выход которого подключен к второму входу сумматора 4, первый вход которого подсоединен к выходу блока 3 формирования сигнала от- клонения органа управления по курсу, третий вход связан с выходом демпфера рыскания 5, а выход - с приводом руля направления, при этом вход усилителя 9 с переменным коэффициентом усиления связан с выходом датчика 1 положения рычага управления по крену, а вход блока 3 формиро- вания сигнала отклонения органа управления по курсу подсоединен к выходу датчика 2 положения рычага управления по курсу.
Работает система следующим образом.
На земле перед взлетом закрылки находятся в выпущенном положении (о3 0), а стреловидность крыла соответствует минимальной стреловидности (Ј мин). При этом сигналы с датчиков положения закрылков 7 и стреловидности крыла 10 отсутствуют, обмотки ключей 8 и 11 обесточены.
Сигнал с датчика положения 1 рычага управления по крену поступает через усилитель 9, размыкающие контакты ключа 11 и апериодическое звено 6 на второй вход сумматора 4. Таким образом на втором входе сумматора 4 будет присутствовать сигнал перекрестной Связи от ручки управления по крену в киль равный:
ДоКХэ К э МфнэХэ,
где АсгКХэ - сигнал перекрестной связи от
ручки управления по крену в киль, град;
Кнэ - передаточное число от ручки управления по крену в киль, формируемое в усилителе 9, оно может быть выбрано в пределах:
Кнэ 0,05-0,1град а к/ммХэ;
. ok - перемещение киля, град; Л/фнэ - апериодическое звено типа: э 1 т э
Л/Фн3
+ 1
-,ТНЭ 0.3-0,8 с.
апериодическое звено N препятствует прохождению в цепь управления килем небольших непроизвольных перемещений рычага управления по крену;
Хэ - перемещение рычага управления по крену, замеряемое датчиком положения 1, мм.
На первом входе сумматора 4 будет присутствовать сигнал ок летч., который формируется в блоке 3 по сигналам датчика положения 2 рычага управления по курсу:
ок летч. F (Хн), где:
Ok лвтч. - сигнал перемещения киля от летчика, град;
Хн - перемещение рычага управления по курсу, замеряемое датчиком положения, 2 мм.
На третьем входе сумматора 4 будет присутствовать сигнал от демпфера рыскания 5 Ok др.
Таким образом, с выхода сумматора 4 на привод руля направления сигнал отклонения Ok:
Ok Ok лвтч. + Ok др +
который обеспечит необходимую управляе- мость самолета при полете на глиссаде с выпущенными закрылками.
После набора скорости и уборки закрылков (Оз 0) на ключ 8 поступит команда с датчика 7 положения закрылков, по кото- рой ключ 8 срабатывает. По команде ключа 8 в усилителе 9 изменится величина коэффициента усиления, при этом сигнал с усилителя 9 поступит через размыкающие контакты ключа 11 на апериодическое звено 6 и через него на сумматор 4.
Коэффициент усиления усилителя 9 должен быть выбран таким образом, чтобы величина передаточного числа Кнэ в этом случае уменьшилась в 2,5-3 раза. При этом обеспечивается необходимая точность и безопасность пилотирования самолета на наиболее ответственных режимах полета - например, при заправке в воздухе, когда летчику необходимо небольшими переме- щениями рычагов управления добиться попадания заправочной штанги самолета в конус заправочного шланга. При этом также уменьшается психофизиологическая нагрузка, так как летчик избавлен от необхо- димости координированно подрабатывать педалями при кренах.
0
По мере увеличения скорости полета и, следовательно, стреловидности крыла, эффективность киля растет и передаточное число перекрестного сигнала от ручки управления по крену в курс должно быть уменьшено. Учитывая, что на больших скоростях полета, например, с максимальной стреловидностью, практически отсутствуют режимы ручного управления, требующие точных дозированных перемещений рычагов управления по крену, сигнал перекрестной связи на этом режиме может быть, отключен.
Отключение сигнала перекрестной связи осуществляется следующим образом: при стреловидности крыла, превышающей среднюю стреловидность (% #ср) с датчика стреловидности крыла 10 поступает команда на ключ 11, по которой контакты ключа 11 размыкаются. В результате сигнал перекрестной связи на вход 1 сумматора 4 на этом режиме полета не поступит.
Обобщенный алгоритм работы системы, обеспечивающий отклонение киля можно записать следующим образом:
Ok - Ok летч. + Ok др +
где: Ok летч. - отклонение киля от летчика, град;
Ok др - отклонение киля от демпфера рыскания,град;
ДоКХэ К„э Л/фнэ Хэ .1
V э -.
Кн гК„эпрИХ Хср
г И
.
К„эградок/ммХэ прио37 0
КЙ L3
кэ|
Кн
2.5
ГРЯА к/ммХэ ПрИОэ 0
II,
К„э 0,05-0, о к/ммХа 1
Л/фнэ
ТЙр + 1
-, Тнэ 0,3-0,8 с
Хэ - перемещение рычага управления по крену, мм;
0з - отклонение закрылков, град. Система обеспечивает достижение не- обходимой точности и безопасности упрэа- ления полетом самолета на всех режимах полета, где требуется точное управление боковым движением,
Ф о р м у л а и з о б р е т е н и я
Система электродистанционного управления самолетом, содержащая последовательно соединенные датчик положения ручки управления по крену и усилитель, апериодическое звено, последовательно соединенные датчик положения рычага управления по курсу, блок формирования сигнала отклонения органа управления по курсу и сумматор, демпфер рыскания, о т личающаяся тем, что, с целью повышения точности управления и безопасности полета путем коррекции сигнала перекрестной связи от ручки управления по крену в канал курса, в нее дополнительно введены
последовательно соединенные датчик положения закрылков и первый ключ, последовательно соединенные датчик стреловидности крыла и второй ключ, а усилитель выполнен в виде усилителя с переменным коэффициентом усиления, управляющий вход которого соединен с выходом первого ключа, а выход - соединен с входом апериодического звена через размыкающие контакты второго ключа, второй вход сумматора
соединен с выходом апериодического звена, а третий вход - с выходом демпфера рыскания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| ДЕМПФЕР РЫСКАНИЯ САМОЛЕТА | 1999 |
|
RU2194650C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| Система управления боковым движением беспилотного малоразмерного летательного аппарата | 1990 |
|
SU1825746A1 |
| ДАЛЬНИЙ ПОИСКОВО-СПАСАТЕЛЬНЫЙ ПОПЛАВКОВЫЙ ГИДРОСАМОЛЕТ-АМФИБИЯ ТРИМАРАННОЙ СХЕМЫ КОМПОНОВКИ "ФРЕГАТ" | 2006 |
|
RU2324627C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
Изобретение относится к авиационной технике, в частности к системам формирования управляющих сигналов в электродистанционных системах управления самолетом. Цель - повышение точности управления и безопасности полета путем коррекции сигнала перекрестной связи от ручки управления по крену в канал поворотного киля самолета. Система содержит датчики положения рычагов управления по крену и курсу, блок формирования сигнала отклонения органа управления по курсу, сумматор, демпфер рыскания и апериодическое звено, датчик положения закрылков, первый ключ, усилитель с переменным коэффициентом усиления, датчик стреловидности крыла и второй ключ. 1 ил.
| Техническая информация ЦАГИ, № 5, 1984, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
