Изобретение относится к устройствам для работы с микроорганизмами, а именно к качалкам для колб, и может быть использовано в биотехнологии и микробиологии, например при культивировании микроорганизмов и клеток животных и растений в емкостях и сосудах. Кроме того, изобретение может быть использовано в медицине, пищевой и других отраслях промышленности, в которых требуется интенсивное перемешивание жидких сред.
Известен шейкер [1] , содержащий основание, на котором установлены платформа для размещения сосудов с перемешиваемой жидкостью, механизм крепления сосудов на платформе, привод с выходным валом и кинематический преобразователь вращательного движения выходного вала привода в движение платформы, вызывающее перемешивание жидкости в сосудах. Подобные устройства широко применяются в микробиологии и биотехнологии при проведении исследовательских работ по культивированию микроорганизмов.
Однако эти устройства не обеспечивают достаточно высокой степени перемешивания. Недостаточная степень перемешивания определяется плоскопараллельным движением платформы, поскольку в этом случае в сосудах, установленных на платформе, возникает только круговое движение жидкости. При этом слои жидкости, вращающейся по кругу, плохо перемешиваются между собой, поскольку движущая сила недостаточна для взаимопроникновения слоев, расположенных как на различных расстояниях от центральной оси сосуда, так и на различных расстояниях от его днища. Кроме того, слои жидкости, находящиеся на различном расстоянии от центральной оси сосуда, перемешиваются по-разному: вследствие большей скорости в более удаленных от центральной оси слоях жидкости перемешивание более интенсивное. Значительно слабее перемешивание осуществляется у слоев, близлежащих к центральной оси сосуда. Указанная выше причина не позволяет повысить эффективность перемешивания путем увеличения числа оборотов платформы с находящимися на ней сосудами, поскольку в этом случае в слоях жидкости, наиболее удаленных от центральной оси сосуда, возникает сильный турбулизирующий эффект, вызывающий турбулентные завихрения, приводящие к травмированию микорорганизмов, находящихся в жидкости. Таким образом, скорость плоскопараллельного вращения платформы не может быть больше некой критической скорости, при которой наступает травмирование микроорганизмов в периферийных слоях жидкости или ее выплескивание из сосуда. Однако при этой скорости в центральных и средних слоях жидкости в сосуде получается низкая эффективность перемешивания. Поэтому и в среднем по сосуду эффективность массообмена при плоскопараллельном движении получается невысокой. Эти причины не позволяют использовать указанное устройство для получения высокого коэффициента массообмена в исследовательских работах при культивировании микроорганизмов.
Известно также устройство [2], отличающееся тем, что сосуды размещаются не непосредственно на платформе, а на наклонной плите, расположенной на платформе. Наклонное положение сосудов вызывает увеличение поверхности жидкости, контактирующей с кислородом воздуха, и более свободное движение жидкости при вращении сосудов. Но и в этом случае сосуды совершают плоскопараллельное движение в горизонтальной плоскости, которому присущи описанные выше недостатки:
недостаточно высокая эффективность перемешивания из-за только кругового движения жидкости, при котором вращающиеся круговые слои жидкости с трудом только за счет турбулизации потоков проникают один в другой;
неравномерное перемешивание по радиусу сосуда, недостаточное перемешивание в центре сосуда и увеличение эффективности перемешивания по мере расположения слоев жидкости к периферийной части.
Все известные шейкеры и качалки имеют и другие недостатки. Они являются, как правило, приборами, на которых проводятся микробиологические, биологические и другие исследовательские работы, требующие достаточно высокой точности, однако точность существующих шейкеров не отвечает требованиям исследовательской практики. Прежде всего, это происходит потому, что известные конструкции шейкеров не дают возможности создать различные типы гидродинамической обстановки в сосудах с жидкостью. Они обеспечивают лишь различную эффективность перемешивания при однотипной гидродинамической обстановке. Для проведения исследовательских работ или культивирования микроорганизмов это недостаточно. Особенности культивирования микроорганизмов вытекают из их разнообразия и различных требований разных штаммов микроорганизмов к среде обитания, к чему в первую очередь относится гидродинамика среды обитания, т.е. жидкости. Каждый штамм микроорганизма индивидуален и хорошо развивается только в строго определенных условиях. Некоторые из этих условий научились создавать: определяются и точно поддерживаются оптимальные значения температуры, кислотности и тому подобное. Для каждого штамма определяется индивидуальная питательная среда. И только тип гидродинамической обстановки остается одинаковым для всех штаммов без разбора - для бактериальных, клеточных и других культур. Однако именно гидродинамика определяет процесс массообмена микроорганизма, особенно подвод к нему кислорода и компонентов питательной среды, а также отвод продуктов их жизнедеятельности. Кроме того, гидродинамическая обстановка - это именно те условия, которые окружают микроорганизмы.
Оптимизация гидродинамической обстановки для каждого штамма не удавалась потому, что ее пытались достигнуть лишь путем изменения интенсивности перемешивания при однотипном - плоскопараллельном характере движения. Как было показано выше, этот тип движения вообще является далеко не лучшим типом для гидродинамики. Доказано, что различные штаммы микроорганизмов по-разному реагируют на отдельные характеристики гидродинамики. Некоторые микроорганизмы хорошо переносят равномерную турбулизацию, но плохо пиковые нагрузки, другие не выносят тангенсальные составляющие движения и тому подобное. Попытки улучшить развитие культуры микроорганизмов за счет увеличения массообмена путем интенсификации однотипной гидродинамики, обусловленной плоскопараллельным движением, ни к чему не привели.
Цель изобретения - создание шейкера, конструкция которого позволила бы обеспечить взаимопроникновение различных слоев жидкости разноудаленных от центральной оси каждого сосуда, и повысить таким образом интенсивность перемешивания жидкости.
Поставленная задача решается тем, что в шейкере, содержащем станину, на котором установлены платформа для размещения сосудов с перемешиваемой жидкостью, механизм закрепления сосудов на платформе, привод с выходным валом и кинематический преобразователь вращательного движения выходного вала в движение платформы, согласно изобретению центральная осевая линия платформы составляет с плоскостью, перпендикулярной к плоскости основания, острый угол, при этом шейкер снабжен средством для ограничения свободного вращения платформы, а кинематический преобразователь имеет соединительный узел, примыкающий к платформе и установленный с возможностью поворота вокруг ее оси, в результате чего обеспечивается перемещение платформы в трех измерениях.
Предлагаемое устройство обеспечивает пространственное объемное перемещение платформы в трех измерениях, при этом происходит вращение сосудов, их покачивание их стороны в сторону и вертикальное движение сверху вниз и снизу вверх. При этом плоскость, в которой осуществляется покачивание сосудов, также поворачивается одновременно с вращением сосуда. Указанные движения производятся одновременно, с различной амплитудой и интенсивностью (скоростью).
Такое сложное кинематическое движение приводит к тому, что наряду с вращением жидкости в сосудах в них возникают радиальные потоки жидкости, перемешивающие вращающиеся слои жидкости, равноудаленные от центральной оси сосуда. Это обеспечивает равномерность перемешивания жидкости во всем объеме сосуда вне зависимости от расстояния слоя от центра сосуда. Подобный характер движения обеспечивает более равномерное и более эффективное перемешивание жидкости. Большая эффективность перемешивания позволяет проводить этот процесс при меньших скоростях движения платформы, что обеспечивает меньшую турбулизацию жидкости и уменьшает травмируемость микроорганизмов.
Приведенные выше отличительные особенности кинематического преобразователя позволяют в широких пределах менять амплитуду качаний сосудов, величину вертикальных перемещений за одно качание, скорость вращения сосудов, а также изменять перемещение плоскости, в которой происходит качание сосудов. Возможность изменения многих параметров в столь широких пределах позволяет создавать различные типы гидродинамики, что дает возможность определять оптимальную гидродинамическую обстановку для любого исследуемого штамма микроорганизмов.
В предпочтительном варианте выполнения изобретения центральные осевые линии платформы и выходного вала составляет между собой острый угол, при этом платформа и соединительный узел расположены соосно с возможностью относительного поворота. Такое решение упрощает конструкцию устройства и позволяет увеличить равномерность и эффективность перемешивания жидкостей в сосудах.
В соответствии с одним из вариантов конструкции устройство имеет средство для изменения угла между центральными осевыми линиями платформы и выходного вала, что увеличивает разнообразие получаемых гидродинамических условий в сосудах с жидкостями.
В другом варианте выполнения устройства средство для изменения угла между центральными осевыми линиями платформы и выходного вала содержит шарнирный узел, соединяющий выходной вал с соединительным узлом, и приспособление для поворота соединительного элемента в фиксированные положения, при этом ось шарнирного узла расположена в плоскости, перпендикулярной к оси выходного вала. Такой вариант выполнения изобретения относительно прост по конструкции и надежен в работе.
В третьем варианте выполнения устройства приспособление для поворота соединительного узла содержит расположенный соосно с ним штырь, установленный с возможностью осевого перемещения, и шарнирно соединенные между собой промежуточный элемент и поворотную скобу, при этом скоба контактирует с соединительным элементом, а промежуточный элемент - с выходным валом.
Целесообразно, чтобы шейкер имел приспособление для изменения расстояния между центром платформы и осевой линией выходного вала. Такой вариант выполнения изобретения позволяет изменять эксцентриситет, что существенно разнообразит гидродинамику процесса перемешивания.
В четвертом варианте выполнения изобретения соединительный узел выполнен в виде конуса, при этом приспособление для изменения расстояния между центром платформы и осевой линией выходного вала выполнено в виде гнезд, расположенных на конусной поверхности соединительного узла на разных расстояниях от осевой линии выходного вала, при этом ось платформы размещена в одном из гнезд с возможностью вращения в нем, а каждое гнездо снабжено фиксатором для предотвращения продольного перемещения оси платформы. Такое выполнение шейкера относительно просто по конструкции и позволяет изменять гидродинамику процесса.
В пятом варианте выполнения изобретения в центре платформы над ее поверхностью расположен блок управления, на котором размещены органы управления и индикации. Такой вариант выполнения изобретения облегчает управление шейкером.
В одном из вариантов конструкции изобретения выходной вал выполнен криволинейным из двух расположенных между собой под острым углом частей, одна из которых является соединительным узлом.
В соответствии с одним из вариантов выполнения изобретения средство для изменения угла между осевыми линиями платформы и выходного вала выполнено в виде резьбовой втулки, закрепленной на основании и охватывающей соединительный узел, а также навинченного на втулку кольца, одна из торцовых поверхностей которого контактирует с платформой. Такой вариант выполнения весьма упрощает управление изменением угла наклона платформы к основанию.
Весьма целесообразно, чтобы средство для ограничения свободного вращения платформы было выполнено в виде кольцевой прокладки, установленной на держателях на основании между последней и платформой в плоскости, перпендикулярной к осевой линии выходного вала и контактирующей с платформой.
И, наконец, еще в одном варианте выполнения изобретения средство для ограничения свободного вращения платформы выполнено в виде по меньшей мере одной пружины, соединяющей платформу с основанием.
На фиг. 1 изображено устройство для культивирования микроорганизмов, общий вид; на фиг. 2-4 - варианты выполнения шейкера; на фиг. 5-12 - варианты кинематической схемы шейкера; на фиг. 13-15 - варианты кинематической схемы средства для ограничения свободного вращения платформы; на фиг. 16 - вариант выполнения механизма крепления сосудов на платформе.
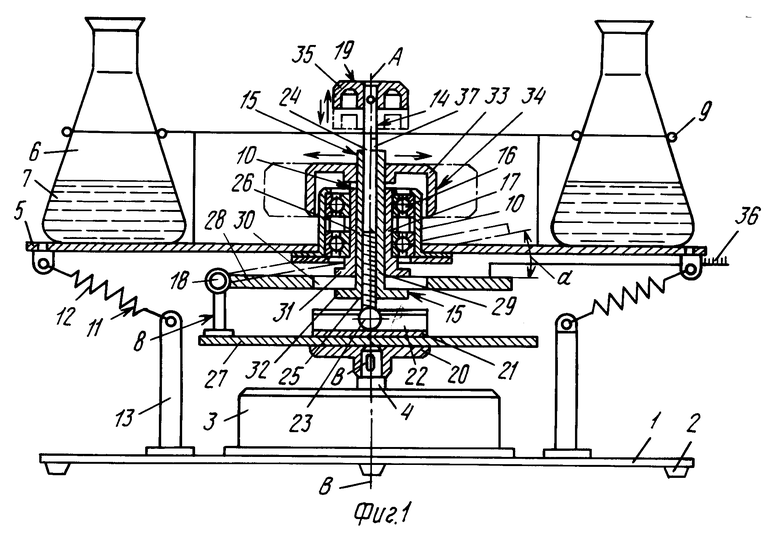
Шейкер содержит основание 1 (фиг.1) с ножками 2, на котором установлен привод 3 с выходным валом 4. Платформа 5 для размещения сосудов 6 с перемешиваемой жидкостью 7 соединена с выходным валом 4 с помощью кинематического преобразователя 8. Сосуды 6 на платформе 5 закреплены с помощью механизма 9. Преобразователь 8 снабжен соединительным узлом 10, выполненным в виде втулки 10I, примыкающей к платформе 5. Центральная осевая линия А-А платформы 5 составляет с плоскостью, перпендикулярной к основанию 1, а также с центральной осевой линией В-В выходного вала 4 острый угол α. Шейкер содержит также средство 11 для ограничения свободного вращения платформы 5, выполненное в виде пружин 12. Один конец каждой пружины 12 соединен с платформой 5, а другой - с концом штыря 13, закрепленного на основании 1.
В шейкер входит также средство 14 для изменения угла α между центральными осевыми линиями А-А и В-В платформы 5 и выходного вала 4, а также приспособление 15 для изменения эксцентриситета платформы 5.
Втулка 101 установлена соосно с осевой линией А-А платформы 5 с возможностью свободного вращения относительно последней в подшипниках 16, установленных в цилиндрическом корпусе 17. Корпус 17 установлен соосно с платформой 5 и жестко соединен с ней. Средство 14 содержит шарнирный узел 18 и приспособление 19 для поворота соединительного узла 10 в фиксированные положения.
Преобразователь 8 установлен на торцовой поверхности 20 вала 4.
Средство 14 состоит из укрепленных на торцовой поверхности 20 вала 4 и направляющих 21, выполненных профильными, т.е. имеющих канал 22, проходящий параллельно торцовой поверхности 20 вала 4. В канал 22 входит шарообразный наконечник 23 штыря 24. Профиль канала 22 направляющих 21 выбран таким, чтобы он обеспечивал беспрепятственное прохождение шарообразного наконечника 23 вдоль канала 22 и фиксировал без люфта положение штыря 24 в поперечном положении направляющих 21. Штырь 24 расположен соосно с втулкой 10I по ее центру и соединен с помощью резьбового соединения 25 с зажимной втулкой 26, расположенной соосно с втулкой 10I между последней и штырем 24. Зажимная втулка 26 входит в состав приспособления 15, обеспечивающего поступательное смещение платформы 5 относительно осевой линии В-В вала 4 и изменение таким образом эксцентриситета платформы 5.
Шарнирный узел 18 обеспечивает закрепление втулки 10I cоединительного узла 10 относительно вала 4 без возможности проворачивания вокруг его оси, но сочленяется их (вал 4 с втулкой 10I) с возможностью поворота в вертикальной плоскости, проходящей через осевую лимнию В-В вала 4. Шарнирный узел 18 снабжен промежуточным элементом 27, состыкованным или выполненным за одно целое с направляющими 21, с помощью которых он соединен с валом 4. При этом шарнирный узел 18 соединен с периферийной частью промежуточного элемента 27 своей неподвижной частью. Подвижная часть шарнирного узла 18 подсоединена к периферийной части поворотной скобы 28, соединяющей узел 18 с втулкой 10.
Приспособление 15 содержит зажимную втулку 26, подвижно установленную в сквозном отверстии втулки 10 соосно с осью А-А. Нижняя часть 29 зажимной втулки 26 выходит из отверстия втулки 10I и размещается в сквозном пазу 30 поворотной скобы 28 так, что боковая поверхность зажимной втулки 26 контактирует с боковой поверхностью паза 30. В нижних частях втулок 10I и 26 имеются бурты соответственно 31 и 32, выходящие за пределы ширины сквозного паза 30. Таким образом, поворотная скоба 28 расположена между торцовыми поверхностями буртов 31 и 32 соответственно втулок 10I и 26. В верхней части зажимной втулки 26 имеется резьба, на которую навинчена фигурная гайка 33. При завинчивании гайки 33 бурты 31 и 32 сближаются и поворотная скоба 28 оказывается зажатой между ними, что обеспечивает фиксированное положение платформы 5 при заданном эксцентриситете. При обратном вращении фигурной гайки 33 приспособление 15 разблокируется и втулка 10I получит возможность скольжения вдоль паза 30 для изменения величины эксцентриситета. Таким образом, бурты 31 и 32 совместно с фигурной гайкой 33 служат фиксатором положения платформы 5 при заданном эксцентриситете.
Органы управления и индикации положения угла α наклона платформы 5 и ее эксцентриситета относительно осевой линии В-В вала 4 размещены на блоке управления - рукоятке 34, расположенной в центре платформы 5 над ее поверхностью. Органы управления и индикации состоят из фигурной гайки 33, управляющей фиксированием заданной величины эксцентриситета, и фигурной гайки 35, управляющей величиной угла α наклона платформы 5, а также градуировочных шкал 36 и 37, показывающих соответственно величины эксцентриситета и угла α наклона платформы 5.
Устройство работает следующим образом.
Сосуды 6 необходимой формы и размеров устанавливаются на платформу 5 и фиксируются механизмом 9. Производится подбор оптимального гидродинамического режима для исследуемого штамма микроорганизмов, для чего определяются величины эксцентриситета и угла α наклона платформы 5 к основанию 1, а также число оборотов платформы 5 в минуту. Для этого поворотом фигурной гайки 33 разблокируется приспособление 15 и устанавливается заданный эксцентриситет смещением платформы 5 путем поворота рукоятки 34. Величина смещения контролируется по градуировочной шкале 36. После установки заданного угла α наклона платформы 5 приспособление 15 блокируется завинчиванием фигурной гайки 33. Затем по электронному блоку управления (не показан) устанавливают заданное число оборотов и включают привод 3. Движение от привода 3 передается посредством кинематического преобразователя 8 платформе 5, которая выполняет заданное движение строго по определенной траектории и с заданной скоростью. Если определенное движение не оказалось оптимальным для исследуемого штамма, оно корректируется до тех пор, пока не будут определены параметры движения, при которых исследуемый штамм развивается наиболее благоприятно. При этом следует иметь в виду, что увеличение угла α наклона платформы 5 к основанию 1 увеличивает радиальные потоки жидкости в сосудах, а также вертикальные составляющие этих потоков. Увеличение эксцентриситета увеличивает круговые потоки жидкости, а увеличение числа оборотов платформы 5 интенсифицирует процесс в целом. Варьируя изменением величин этих параметров следует добиться оптимальной гидродинамической обстановки для исследуемого штамма.
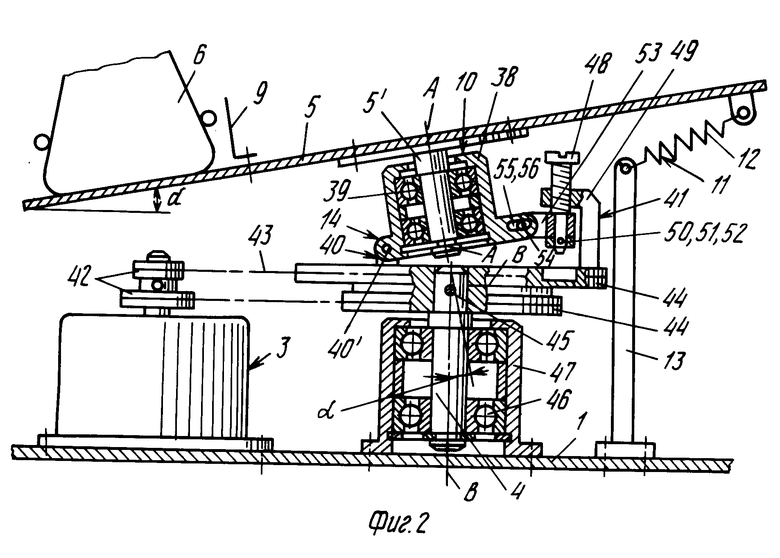
На фиг.2 изображен вариант выполнения изобретения, в котором соединительный узел 10 выполнен в виде цилиндрической втулки 38, примыкающей к платформе 5 и соосно с ней расположенной. Во втулке 38 установлены подшипники качения 39, на которые опирается ось 5I платформы 5. Средство 14 выполнено в виде шарнирного узла 40, соединяющего выходной вал 4 с втулкой 38, и приспособления 41 для поворота втулки 38 в фиксированные положения. Ось 40I шарнирного узла 40 расположена в плоскости, перпендикулярной к оси В-В выходного вала 4.
Привод 3 снабжен парой шкивов 42 разного диаметра, связанных ременной передачей 43 с аналогичной парой шкивов 44, установленных на валу 4 с помощью штифта 45. Вал 4 установлен в подшипниках 46 качения в неподвижной втулке 47, закрепленной на основании 1.
Средство 11 содержит одну пружину 12, соединяющую платформу 5 с основанием 1.
Приспособление 41 содержит резьбовой штырь 48, укрепленный на шкиве 44 с помощью кронштейна 49. Нижняя часть штыря 48 выполнена гладкой (безрезьбовой) цилиндрической, установлена с возможностью вращения во втулке 50 и зафиксирована в ней от возможности продольного перемещения шайбой 51 со штифтом 52. Втулка 50 с помощью рычага 53 несет ось 54, установленную в продольной прорези 55 проушины 56, жестко закрепленной на втулке 38. Шарнирный узел 40 расположен на противоположной от приспособления 41 стороне втулки 38 таким образом, что своей подвижной частью он жестко прикреплен к втулке 38, а неподвижной - к шкиву 44.
Устройство работает следующим образом;
Включают электродвигатель привода 3 и с помощью ременной передачи 43 его вращение передается выходному валу 4 привода 3 и втулке 38. При этом ось 5I, вращаясь в подшипниках 39, описывает конусную кривую, а платформа 5, подторможенная пружиной 12, совершает сложное пространственное движение, обеспечивающее эффективное равномерное перемешивание жидкости в сосудах 6. Для изменения типа движения изменяют угол α наклона платформы 5 к основанию 1 с помощью приспособления 41. Для этого вращают штырь 48, который, ввинчиваясь в разьбовое отверстие кронштейна 49, перемещает рычаг 53 в вертикальном направлении. При этом соединенная с рычагом 53 ось 54 также перемещается вертикально и, скользя вдоль прорези 55 проушины 56, вызывает поворот втулки 38 вокруг оси 40I шарнирного узла 40, что свою очередь определяют изменение величины угла наклона платформы 5 к основанию 1.
В этом варианте выполнения изобретения не предусмотрено приспособление 15 для изменения эксцентриситета платформы 5.
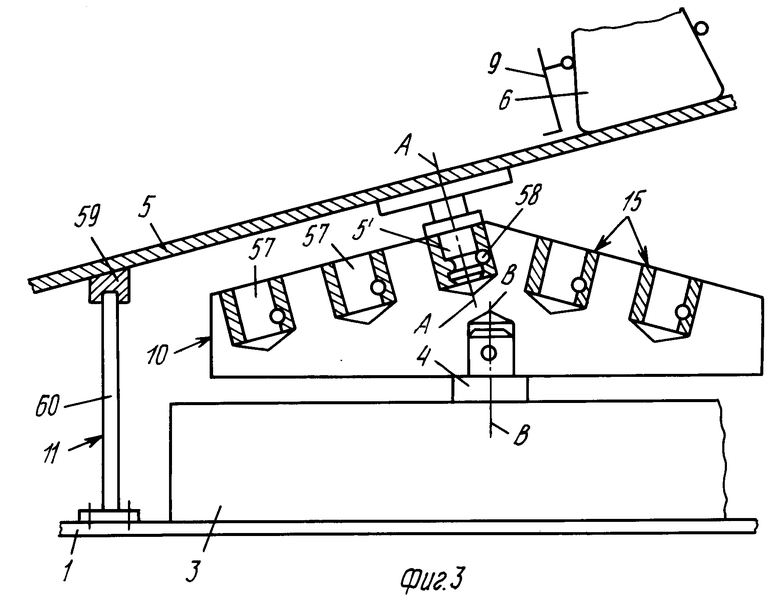
На фиг.3 представлен другой вариант выполнения изобретения. Соединительный узел 10 в нем выполнен в виде конуса, при этом приспособление 15 для изменения эксцентриситета платформы 5 выполнено в виде гнезд 57, расположенных на конусной поверхности соединительного узла 10 на разных расстояниях от осевой линии В-В выходного вала 4. Ось 5I платформы 5 размещена в одном из гнезд 57 с возможностью вращения в нем. Каждое гнездо 57 снабжено фиксатором 58 для предотвращения продольного перемещения оси 5I платформы 5.
Средство 11 для ограничения свободного вращения платформы 5 выполнено в виде кольцевой прокладки 59, установленной на держателях 60 на основании 1 между последним и платформой 5 в плоскости, перпендикулярной к осевой линии В-В выходного вала 4 и контактирующей с платформой 5.
Устройство работает следующим образом.
Приводится во вращение привод 3, что вызывает вращение соединительного узла. Это приводит к тому, что ось 5I осуществляет конусное движение, а поскольку платформа 5 подтормаживается прокладкой 59, то ось 5I проворачивается в гнезде 57. При этом платформа 5 перекатывается по прокладке 59 и осуществляет сложное пространственное движение, составленное из вращения, покачивания и вертикального перемещения. Для повышения интенсивности перемешивания ось 5I устанавливается в более удаленное от осевой линии В-В вала 4 гнездо 57, тем самым увеличивается эксцентриситет движения платформы 5.
В данном варианте выполнения изобретения не предусмотрено средство 14, изменяющее угол α наклона платформы 1.
На фиг.4 представлен еще один вариант выполнения изобретения.
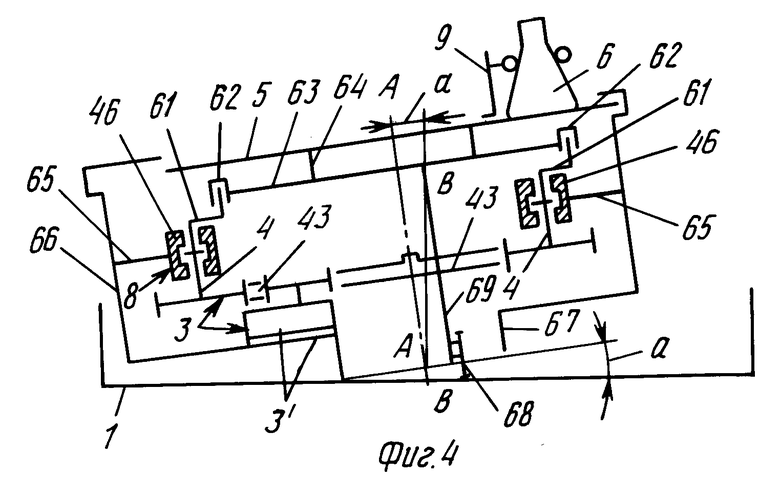
В отличие от описанных вариантов конструкции привод 3 содержит два выходных вала 4, установленных в подшипниках 46 и имеющих на противоположных концах эксцентрики 61. Эксцентрики 61 посредством шарниров 62 соединены с поддоном 63, на котором с помощью стоек 64 установлена платформа 5. Кинематический преобразователь 8 через подшипники 46 с помощью растяжек 65 соединен с корпусом 66, расположенным на основании 1. Снизу корпус 66 снабжен цилиндром 67, нижняя торцовая поверхность которого параллельна плоскости платформы 5. На основании 1 в полости цилиндра 67 установлен ролик 68, расположенный эксцентрично оси А-А платформы 5. Платформа 5 жестко соединена с рычагом 69, другой конец которого соединен с роликом 68. Центральная осевая линия А-А платформы 5 параллельна осевым линиям выходных валов 4 и составляет с плоскостью, перпендикулярной к основанию 1, острый угол α.
Устройство работает следующим образом.
Включается электродвигатель 3I привода 3 и через ременную передачу 43 и валы 4 его вращение передается эксцентрикам 61, которые заставляют поддон 63 совершать плоскопараллельное эксцентричное движение, обычное для традиционных шейкеров. Однако благодаря тому, что корпус 66 шейкера посредством полого цилиндра 67 имеет точечный контакт с основанием 1, а нижний торец цилиндра 67 образует с основанием 1 острый угол α, плоскопараллельное движение основания 1 посредством рычага 69 передается ролику 68, который совершает круговое движение. При этом нижний торец полого цилиндра 67 обкатывается по основанию 1, а платформа 5 с сосудами 6 совершает сложное пространственное движение.
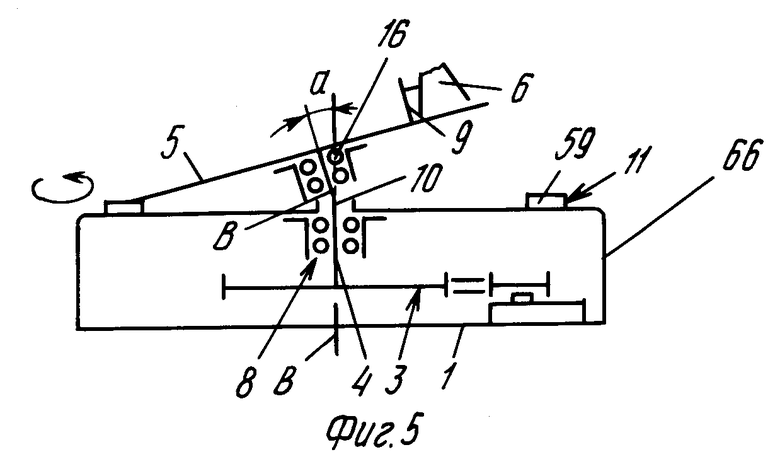
На фиг.5 представлен вариант выполнения изобретения, в котором выходной вал 4 выполнен криволинейным из двух расположенных между собой под острым углом α частей, одна из которых является соединительным узлом 10. Средство 11 для ограничения свободного вращения платформы 5 выполнено в виде кольцевой прокладки 59, установленной на корпусе 66, укрепленном на основании 1 между последним и платформой 5 в плоскости, перпендикулярной к осевой линии В-В выходного вала 4. В процессе вращения платформы 5 она контактирует с прокладкой 59. Работа этого варианта аналогична работе шейкера, изображенного на фиг.2.
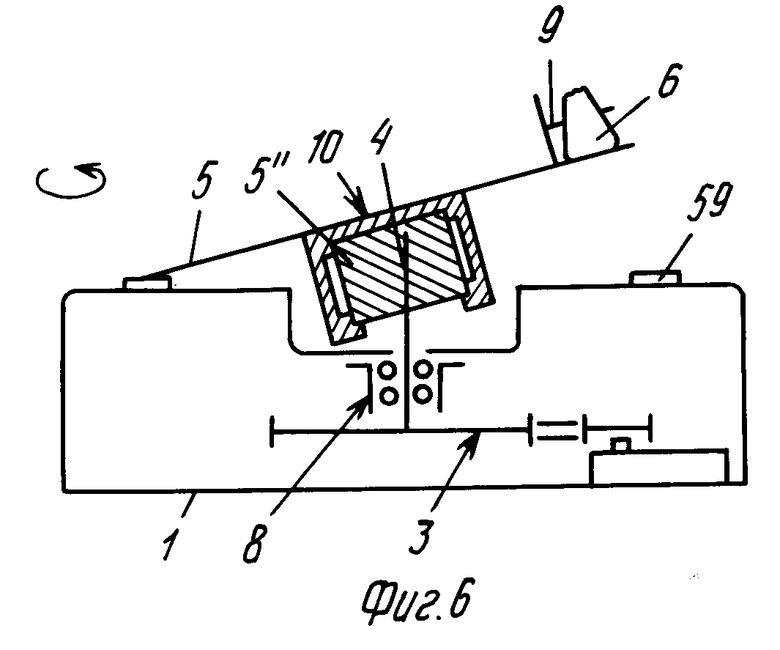
Другой вариант выполнения изобретения (фиг.6) отличается от предыдущего тем, что соединительный узел 10 выполнен в виде цилиндра 5II, установленного соосно с платформой 5.
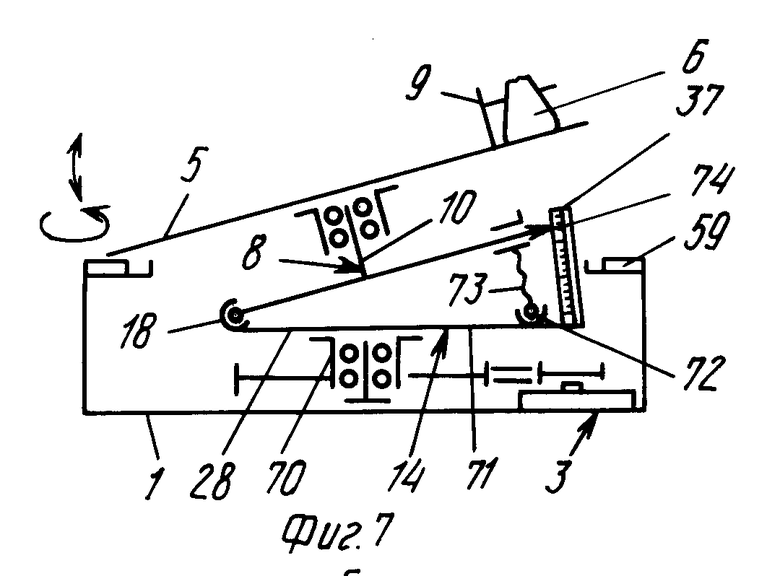
На фиг. 7 показан вариант выполнения средства 14, выполненного в виде вращающейся втулки 70 с промежуточным элементом 71, на котором посредством шарнира 72 установлен винт 73. Устройство индикации имеет шкалу 37 со стрелкой 74.
На фиг.8 представлен вариант выполнения изобретения, в котором средство 14 выполнено в виде резьбовой втулки 75, закрепленной на основании 1 и охватывающей соединительный узел 10, а также кольца 76, навинченного на втулку 75, одна из торцовых поверхностей которого контактирует с платформой 5.
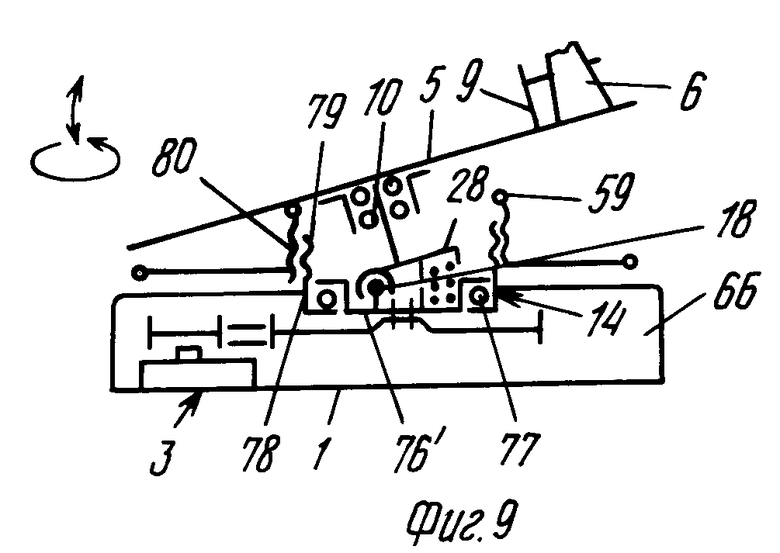
На фиг.9 средство 14 выполнено в виде фигурного кольца 76I, расположенного на подшипнике 77, установленном в гнезде 78 корпуса 66 шейкера. На корпусе 66 установлена резьбовая втулка 79 с навинченным на нее с наружной стороны кольцом 80.
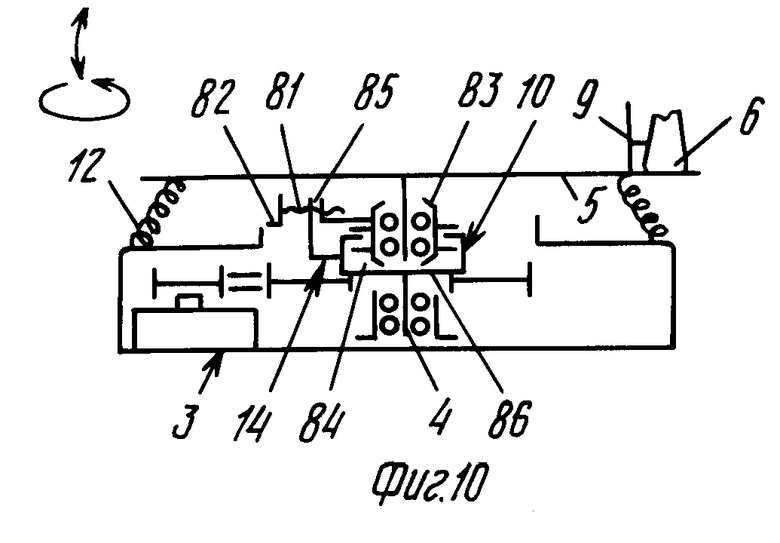
На фиг. 10 средство 14 включает в себя винт 81 с рукояткой 82. Винт 81 дает возможность изменять угол α и фиксировать в заданном положении соединительный узел 10, выполненный в виде втулки 83, шарнирно установленной в корзине 84, охватывающей эту втулку 83. Соединительный узел 10 фиксируется винтом 81 к корзине 84 с помощью сегментного кронштейна 85. Корзина 84 имеет днище 86, жестко соединенное с валом 4.
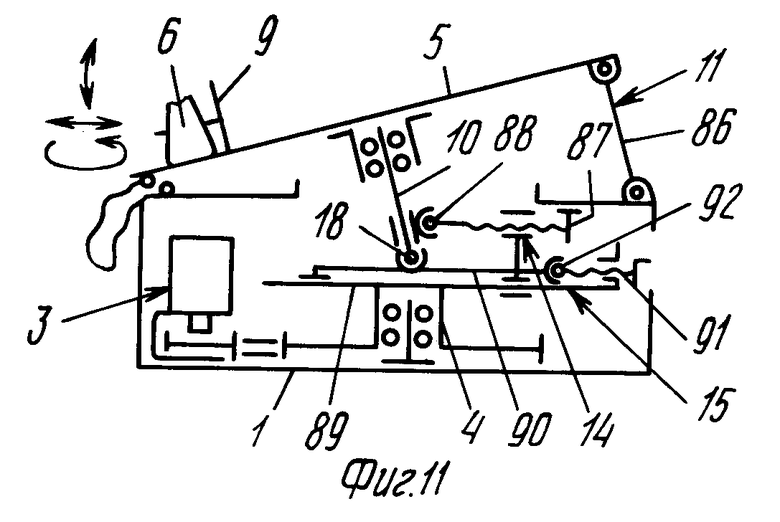
На фиг.11 представлен еще один вариант выполнения изобретения. Средством 11 для ограничения свободного вращения платформы 5 служит трос 86, соединяющий платформу 5 с основанием 1. Средство 14 содержит винт 87 и шарнир 88. В устройство входит также средство 15 для изменения эксцентриситета платформы 5, содержащее установленные на валу 4 направляющие 89, в которых расположен с возможностью перемещения ползун 90. Перемещение ползуна 90 осуществляется винтом 91, соединенным с помощью шарнира 92 с ползуном 90 и установленным с возможностью перемещения по направляющим 89.
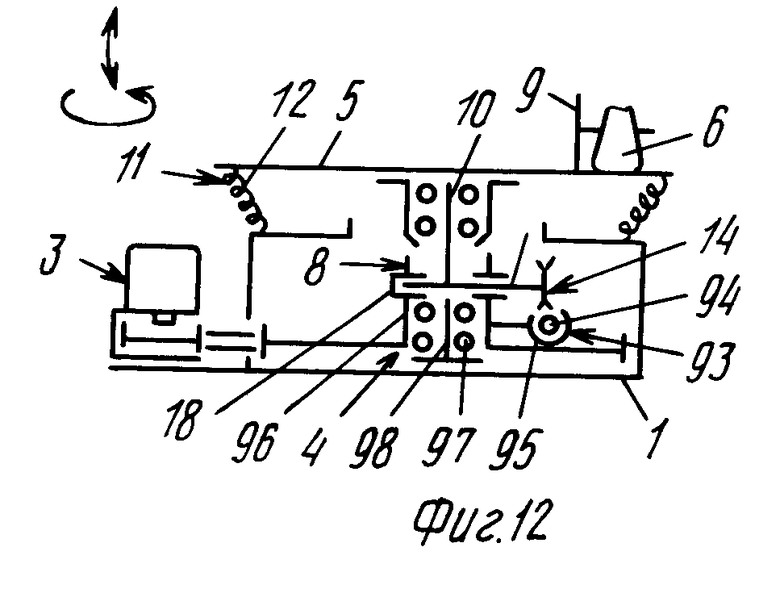
На фиг. 12 изображен другой вариант выполнения изобретения, в котором средство 11 выполнено в виде пружины 12, соединяющей платформ у 5 и основание 1. Средство 14 выполнено в виде червячной передачи 93 с червяком 94, установленным в корпусе 95 и соединенным с валом 4. Вал 4 выполнен в виде втулки 96, установленной с помощью подшипников 97 на неподвижной оси 98, установленной на основании 1. Соединительный узел 10 и вал 4 соединены между собой шарнирным узлом 18, при этом ось шарнирного узла 18 соединена с валом 99 червячной передачи 93.
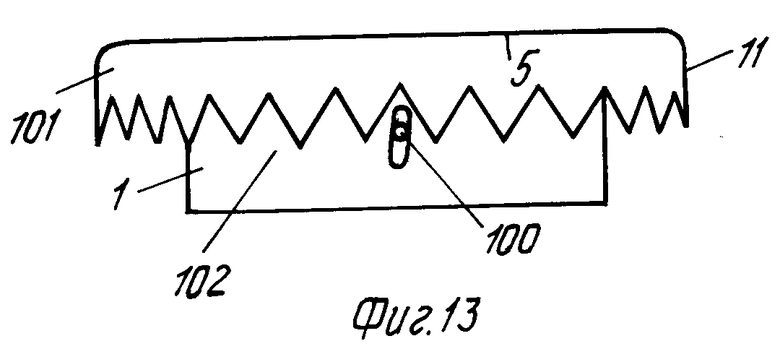
На фиг.13 представлен вариант выполнения средства 11, включающего в себя резиновый палец 100, установленный на основании 1 под платформой 5 с возможностью его вертикального перемещения и фиксации в заданном положении. Платформа 5 снабжена юбкой 101 с треугольными вырезами 102, вершины которых обращены вверх. В зависимости от положения пальца 100 при вращении платформы 5 палец 100 последовательно заходит в вырезы 102 платформы 5, вызывая ее проскальзывание, либо (в верхнем своем положении) палец 100 вводится в один из вырезов 102, фиксируя платформу 5 в заданном положении.
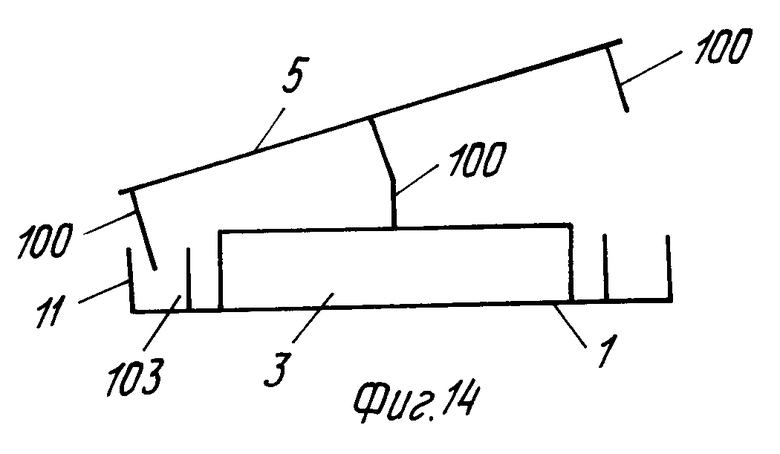
На фиг.14 средство 11 выполнено в виде резиновых пальцев 100, установленных по периферии платформы 5 и выступающих за ее пределы, при этом на основании 1 по кругу установлено множество стаканов 103, в которые заходят концы пальцев 100 при вращении платформы 5.
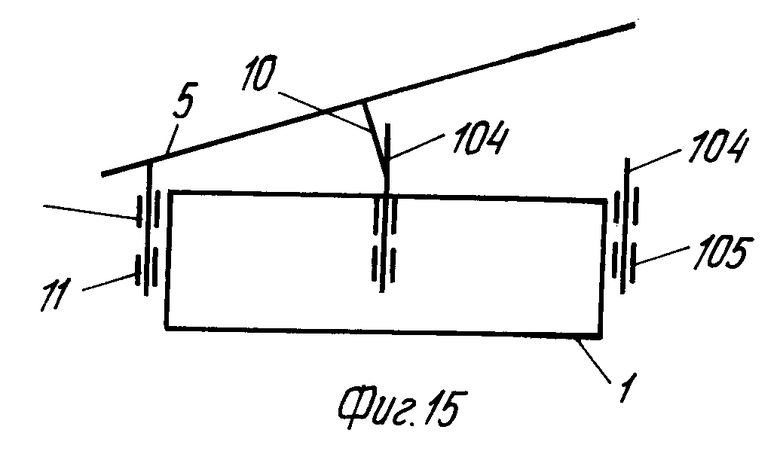
На фиг.15 средство 11 выполнено в виде вертикальных стержней 104, закрепленных по периферии платформы 5. Каждый стержень 104 установлен в направляющих 105 с возможностью вертикального перемещения и фиксации в заданном положении. Каждый стержень 104 устанавливается индивидуально на выбранной для него высоте.
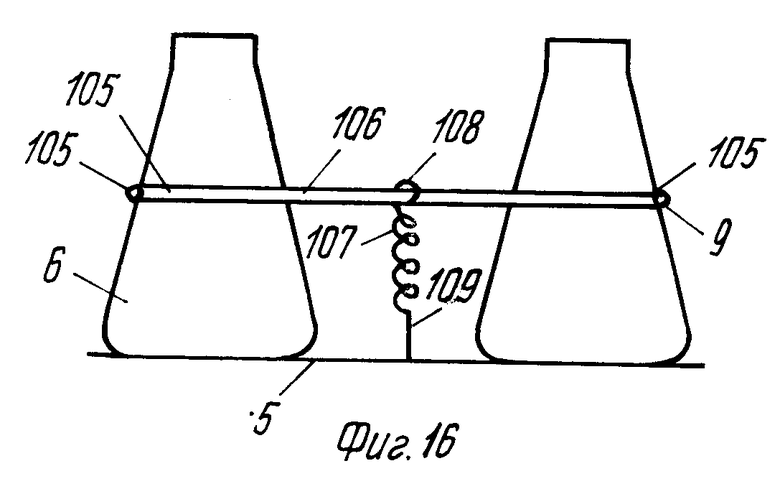
На фиг.16 представлен механизм 9 для закрепления сосудов 6, выполненный в виде проволочных колец 105, объединенных в одно целое перемычками 106, соединенными с платформой 5 посредством пружинных держателей 107, включающих крюк 108 и поводок 109.
По сравнению с известными конструкциями устройство имеет меньший вес и потребляет меньше электроэнергии.
Устройство может быть использовано для проведения научно-исследовательских работ в микробиологической, биотехнологической, фармацевтической, пищевой и химической промышленности, а также в здравоохранении для культивирования микроорганизмов, растворения веществ, смешивания жидких препаратов, а также для получения в небольших количествах суспензий, растворов, смесей и препаратов медицинского назначения.
Созданный прибор позволяет проводить более глубокие и более точные исследования процессов культивирования микроорганизмов, чем известные приборы. Поэтому созданное устройство целесообразно в первую очередь использовать в исследовательских лабораториях, занимающихся созданием новых препаратов и процессов.
Поскольку устройство обеспечивает высокий коэффициент массопередачи при соблюдении мягкого перемешивания, то особенно выгодно его использовать при работе с легко травмируемыми веществами, клетками крови и тому подобное.
Изобретение может быть использовано также при растворении твердых веществ в жидкостях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕННОЙ СЕПАРАЦИИ И ФЛОТАЦИИ | 1996 |
|
RU2100097C1 |
| СПОСОБ СМАЗКИ РОТОРНОЙ МАШИНЫ С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ И РОТОРНАЯ МАШИНА С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ (ВАРИАНТЫ) | 2005 |
|
RU2286461C1 |
| МИКРОАКСИАЛЬНЫЙ НАСОС ПОДДЕРЖКИ КРОВООБРАЩЕНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2637605C1 |
| СПОСОБ ПЕННОЙ СЕПАРАЦИИ И ФЛОТАЦИИ | 1996 |
|
RU2108166C1 |
| ПЕРЕМЕШИВАЮЩИЙ ЭЛЕМЕНТ, ПЕРЕМЕШИВАЮЩИЙ УЗЕЛ И КОНТЕЙНЕР ДЛЯ ТРАНСПОРТИРОВКИ И ХРАНЕНИЯ ЖИДКОСТЕЙ С ПЕРЕМЕШИВАЮЩИМ УЗЛОМ | 2016 |
|
RU2697450C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПИЩЕВЫХ ПРОДУКТОВ С МАГНИТНЫМ ПРИВОДОМ | 2003 |
|
RU2340274C2 |
| УСТРОЙСТВА ДЛЯ ВЫДАЧИ ЖИДКОСТИ ИЗ БУТЫЛКИ | 2005 |
|
RU2371376C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2013 |
|
RU2515141C1 |
| РОБОТ ДЛЯ ОЧИСТКИ ИЗОЛЯТОРОВ | 2015 |
|
RU2659252C1 |
| МАГНИТОВОЛНОВОЙ ФРИКЦИОННЫЙ ВАРИАТОР (ВАРИАНТЫ) | 1997 |
|
RU2138709C1 |

Использование: техническая микробиология, культивирование микроорганизмов в качалочных колбах при механическом встряхивании. Сущность изобретения: устройство содержит основание, платформу для размещения сосудов, механизм закрепления сосудов, привод с выходным валом и кинематический преобразователь вращательного движения выходного вала и движения платформы. Центральная осевая линия платформы составляет с плоскостью, перпендикулярный к основанию, острый угол, при этом устройство снабжено средством для ограничения свободного вращения платформы, а преобразователь включает соединительный узел, примыкающий к платформе и установленный с возможностью поворота вокруг оси для обеспечения перемещения платформы в трех измерениях. 12 з.п.ф-лы, 16 ил.
13. Устройство по п.1, отличающееся тем, что средство для ограничения свободного вращения платформы выполнено в виде по меньшей мере одной пружины, соединяющей платформу с основанием.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каталог "American Seientific Products", р.р.1456, 1068, 1991. | |||
