Изобретение относится к сельскому хозяйству, в частности к автоматическому вождению сельскохозяйственных агрегатов.
Известно устройство для канатной тяги сельскохозяйственных орудий с применением тяговой повозки, дающей движение сельскохозяйственному орудию по кругу.
Недостатком этого устройства является то, что оно пригодно для обработки полей только круглой формы и ограниченных размеров. Кроме того, при этом ухудшаются условия работы орудий, что выдвигает особые требования к их конструкции.
Наиболее близким техническим решением к предлагаемому является устройство для автоматического вождения колесного трактора на гоне, содержащее копирующий щуп, чувствительную головку, включенную в схему управления трехпозиционным золотником гидроусилителя рулевого механизма, и кран для перехода с ручного управления на автоматическое и наоборот. Однако такое устройство эффективно используется только на рабочем гоне (в среднем 85.92% общего пути). На поворотной полосе необходимо переходить на ручное управление агрегатом с разрывом технологического процесса.
Задача изобретения обеспечение возможности вспашки полей выпуклых форм или части поля выпуклой формы без разрыва технологического процесса.
Эта задача решается благодаря тому, что устройство для автоматического вождения пахотного сельскохозяйственного агрегата, содержащее копирующий щуп, чувствительную головку, включенную в схему управления направлением движения, механизм рулевого управления и механизм изменения ширины захвата плуга, содержит также сумматор, первый вход которого подключен к дополнительному выходу чувствительной головки, второй вход к задатчику допустимого угла изменения направления движения агрегата без изменения ширины захвата плуга, а выход соединен с первым входом дифференциатора сигнала на изменение ширины захвата плуга, ко второму входу которого подключен датчик действительной скорости движения агрегата, а выход устройства соединен с механизмом изменения ширины захвата плуга.
Известны плуги с изменяемой шириной захвата, которые позволяют путем изменения ширины захвата в рабочем положении совершать повороты для объезда препятствий и запахивать клинья поля. Предлагаемое устройство, изменяя угол установки корпусов плуга в зависимости от нагрузки на рабочие органы, дает возможность обрабатывать поля любых форм без разрыва технологического процесса.
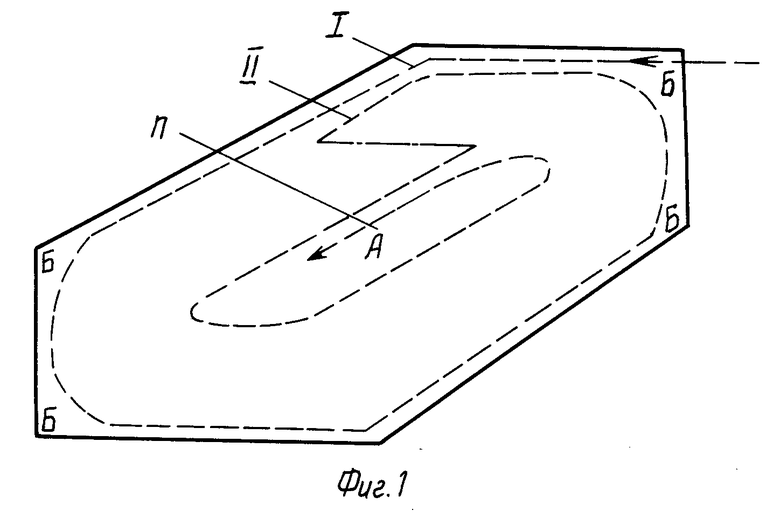
Процесс обработки поля в данном случае следующий (см. фиг. 1). Оператор, управляя агрегатом вручную, делает первый проход (I) по контуру поля. После завершения первого прохода оператор заводит копирующий щуп в след первого прохода, включает в работу устройство для автоматического вождения и дальнейшая обработка поля (проходы II и т.д.) осуществляется путем автоматического вождения. Когда агрегат приблизится к площадке в центре поля (А), которую невозможно обработать круговым способом, оператор переходит на ручное управление агрегатом и завершает обработку или выводит агрегат из обработанного поля.
Участки по углам поля (Б), а при необходимости и участок в центре поля могут быть использованы для посадки лесополос, устройства противоэрозионных валов, каналов для полива и других вспомогательных целей. В этом случае коэффициент использования площади поля не уменьшается в сравнении с традиционным размещением лесополос по периметру прямоугольных полей, а коэффициент использования рабочих ходов агрегата приближается к единице, что на 7. 25% выше по сравнению с работой агрегата с выглублением орудия на поворотных полосах.
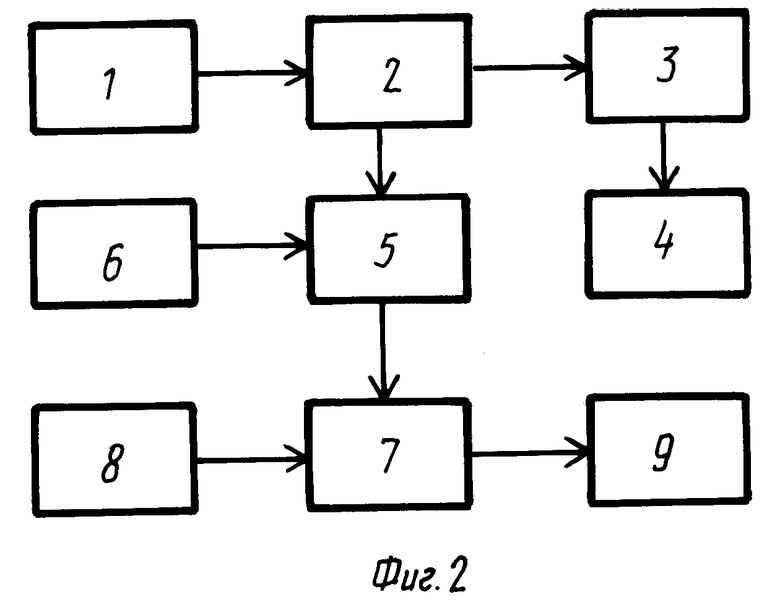
На фиг. 1 изображена одна из возможных схем движения агрегата; на фиг. 2 структурная схема предлагаемого устройства.
Устройство для автоматического вождения пахотного агрегата содержит копирующий щуп 1, устанавливаемый впереди трактора и предназначенный для копирования борозды предыдущего прохода и поворота оси чувствительной головки на угол, пропорциональный величине отклонения направления движения трактора от борозды, чувствительную головку 2, жестко связанную с копирующим щупом и служащую для формирования электрических сигналов, передаваемых на схему 3 управления направлением движения при отклонении копирующего щупа от нейтрального положения, вход которой соединен с чувствительной головкой 2, а выход с механизмом рулевого управления 4, сумматор 5, первый вход которого соединен с вторым выходом чувствительной головки 2, второй вход с задатчиком 6 допустимого угла изменения направления движения без изменения ширины захвата плуга, которым задаются допустимые углы изменения направления движения плуга для разных почв, чтобы избежать поломки корпусов плуга при поворотах. Выход сумматора соединен с первым входом дифференциатора сигнала команд 7 на изменения ширины захвата плуга, второй вход которого соединен с датчиком 8 действительной скорости агрегата. Дифференциатор выполнен по схеме электрической RC-цепи и реализует функцию
τвых(t) K 
 1
1  где K коэффициент усиления;
где K коэффициент усиления;
d ε изменение отклонения направления движения от заданной величины;
dt время изменения;
S расстояние от точки касания почвы копировальным щупом трактора до плуга;
V действительная скорость агрегата.
Выход дифференциатора 7 соединен с механизмом 9 изменения ширины захвата плуга, который установлен на корпусе плуга. Оператор, управляя вручную автоматизированным агрегатом, делает первый проход по контуру поля выпуклой формы или части поля, опускает копирующий щуп в борозду и включает в работу устройство для автоматического вождения.
Устройство работает следующим образом.
При изменении направления следа предыдущего прохода копирующий щуп 1, отклоняясь от оси трактора, воздействует на чувствительную головку 2, которая выдает сигнал, пропорциональный углу отклонения щупа. Этот сигнал поступает в схему 3 управления направлением движения, которая связана с механизмом рулевого управления 4, а также в сумматор 5, где сравнивается с сигналом задатчика 6 допустимого угла изменения направления движения без изменения ширины захвата плуга, и результирующий сигнал поступает в дифференциатор 7 на изменение ширины захвата плуга, где с учетом сигнала датчика 8 действительной скорости движения агрегата и расстояния от копирующего щупа до плуга формируется сигнал на управление механизмом изменения ширины захвата плуга. Изменением ширины захвата плуга обеспечивается сглаживание криволинейных участков выпуклой траектории, устраняется накапливающая ошибка автомата вождения трактора, а также происходит защита корпусов плуга от поломки при резких изменениях направления движения. В случае, когда результирующий сигнал сумматора 5 не превышает значения зоны нечувствительности задатчика 6 допустимого угла изменения направления движения без изменения ширины захвата плуга к изменению направления движения, исполнительный механизм изменения ширины захвата плуга автоматически устанавливается в исходное положение.
Таким образом, устройство для автоматического вождения сельскохозяйственного агрегата позволит водить агрегат по спирали, осуществляя обработку полей выпуклых форм или части поля выпуклой формы без разрыва технологического процесса. При этом производительность в сравнении с загонными способами движения увеличивается до 20% Кроме того, устраняются недостатки загонных способов, связанные, во-первых, с тем, что уплотнение почвы движителями тракторов и опорными колесами орудий и машин на поворотной полосе в 3.4 раза выше по сравнению с движением по спирали без разрыва технологического процесса, и, во-вторых, с тем, что на склонах поворотные полосы обрабатываются вдоль склона, что противоречит требованиям почвозащитной агротехники. При длине гонов 400-800 м площадь поворотной полосы 20 м составит 10-7% площади поля и эта часть поля, как правило, подвергается интенсивной линейной эрозии.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГРУППОВОГО АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ | 1966 |
|
SU179526A1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 1997 |
|
RU2143187C1 |
| Система автоматического вождения сельскохозяйственных агрегатов | 1987 |
|
SU1443831A1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2000 |
|
RU2193831C2 |
| СПОСОБ ВНЕСЕНИЯ И СОХРАНЕНИЯ ПОЧВООБРАЗОВАТЕЛЕЙ В КОРНЕОБИТАЕМОМ ГОРИЗОНТЕ ПОЧВЫ И ОРУДИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2146433C1 |
| БЛОЧНО-МОДУЛЬНЫЙ КУЛЬТИВАТОР | 1998 |
|
RU2156047C2 |
| СПОСОБ ВНЕСЕНИЯ УДОБРЕНИЙ | 1999 |
|
RU2171574C1 |
| МНОГОКОРПУСНЫЙ ПЛУГ-РЫХЛИТЕЛЬ | 2000 |
|
RU2171557C1 |
| СПОСОБ ПРОТИВОЭРОЗИОННОЙ ЗЯБЛЕВОЙ ОБРАБОТКИ ПОЧВЫ И АГРЕГАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2200378C2 |
| СЕКЦИЯ РАБОЧИХ ОРГАНОВ ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ ДЛЯ ОБРАБОТКИ ПАРОВ | 2000 |
|
RU2182751C2 |
Использование: в сельскохозяйственном машиностроении, в частности в устройствах для автоматического вождения с/х агрегатов. Сущность изобретения: устройство содержит копирующий щуп, чувствительную головку, включенную в схему управления направлением движения, механизмы рулевого управления и изменения ширины захвата плуга и сумматор. Первый вход сумматора подключен к дополнительному выходу чувствительной головки, второй - к задатчику допустимого угла изменения ширины захвата плуга, выход соединен с первым входом дифференциатора сигнала команд на изменение ширины захвата плуга, к второму входу которого подключен датчик действительной скорости движения агрегата, а выход устройства соединен с механизмом изменения ширины захвата плуга. 2 ил.
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА, включающее соединенные последовательно копирующий щуп, чувствительную головку, схему управления направлением движения и механизм рулевого управления, отличающееся тем, что оно снабжено сумматором, задатчиком допустимого угла изменения направления движения агрегата без изменения ширины захвата плуга, дифференциатором сигнала команд на изменение ширины захвата плуга, датчиком действительной скорости движения агрегата и механизмом изменения ширины захвата плуга, при этом второй выход чувствительной головки соединен с первым входом сумматора, второй вход которого связан с задатчиком допустимого угла изменения направления движения агрегата без изменения ширины захвата плуга, а выход подключен к первому входу дифференциатора сигнала команд на изменение ширины захвата плуга, второй вход которого соединен с выходом датчика действительной скорости движения агрегата, а выход связан с механизмом изменения ширины захвата плуга.
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 0 |
|
SU236113A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
