Известны устройства для группового автоматического вождения тракторных агрегатов, связь между которыми осуществляется посредством тросов.
Предлагаемая конструкция повышает точность управления группой агрегатов, осуществляет групповое автоматическое вождение тракторов не только на рабочем гоне, но.и на поворотной полосе, а также позволяет уменьшить ширину поворотной полосы. Для этого тросы снабжены компенсирующими пружинами, имеющими привод к датчикам реостатного типа, которые установлены на агрегатах и обеспечивают воздействие на исполнительные органы управления.
Устройство оснащено также копирующим щупом с поворотной рамой. Под действием соответствующих соленоидов, связанных с механизмами подъема и опускания сельскохозяйственной машины-орудия эта рама передает сигналы через трос на соответствующие исполнительные механизмы. Кроме того, поворотная рама копирующего щупа выполнена с датчиком смещения, который направляет агрегаты для движения их на поворотной полосе вслед один за другим.
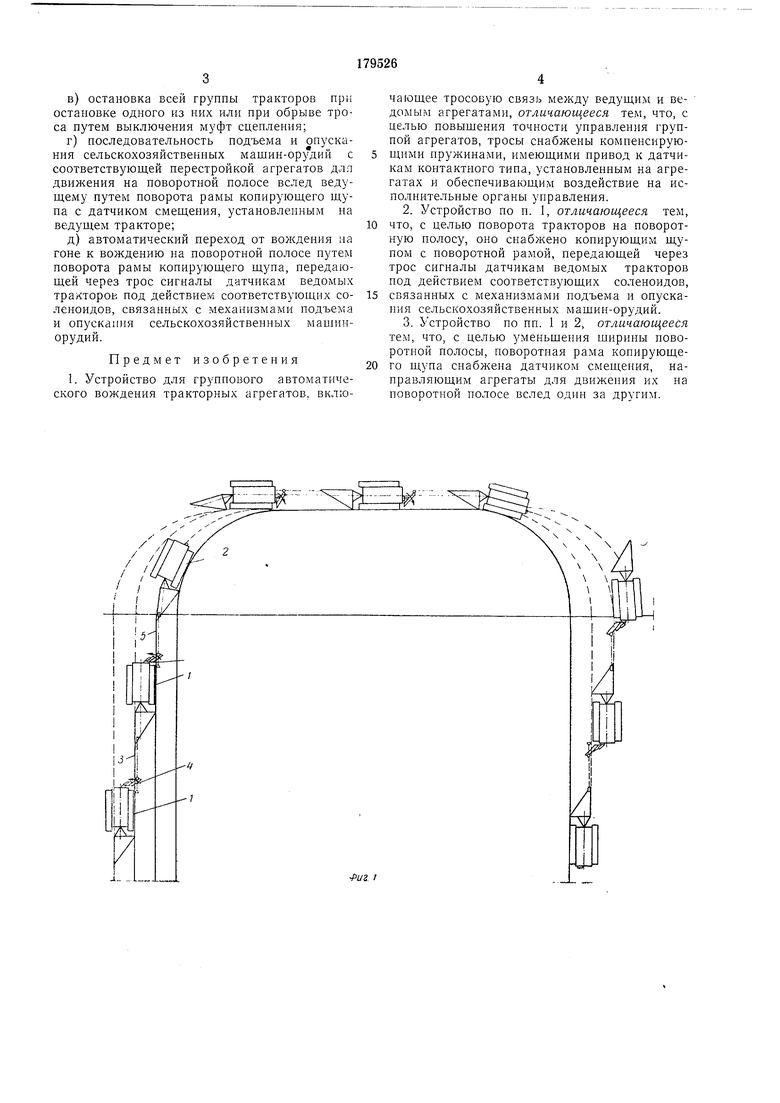
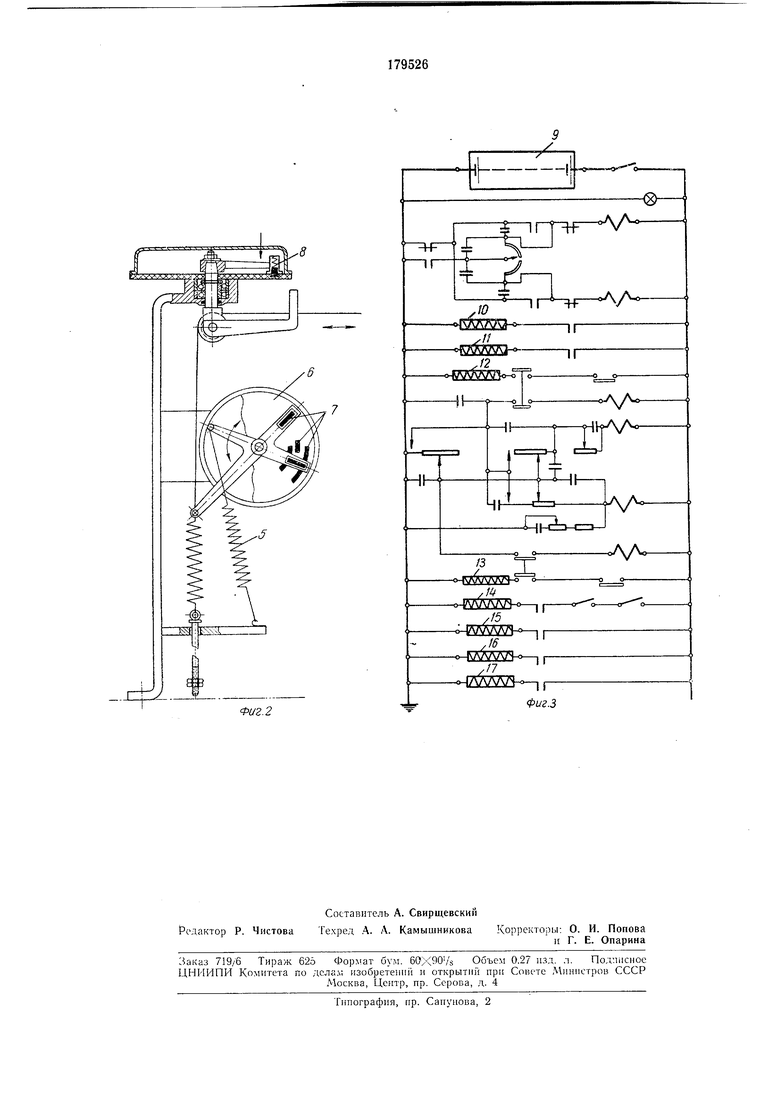
На фиг. 1 изображена схема группового вождения тракторов; на фиг. 2 - схема установки датчиков дистанции и поворота; на фиг. 3 - электрическая схема устройства,
входящего в группу автоматизированных тракторов.
Поворот агрегатов и их по прямой осуществляются трактористом с ведущего трактора, а остальные агрегаты движутся за ним. Ведомые тракторы 1 связаны с ведущим трактором 2 с помощью тросов 3, которыми соединяются датчикп реостатного типа, выполненные в виде контактных коробок. 13едомые тракторы поворачиваются с помощью копирующих щупов с поворотпымп рамами 4, передающими через тросы сигналы датчиков ведомых тракторов. Датчики снабжены компенсирующими прунсинами 5, дисками 6 с контактами 7 и скользящим ползуном 8.
Электрическая схема включает источник питания 9, соленоиды W правой и // левой муфты поворота трактора, соленоиды 12 подъема и 13 опускания плуга, соленоид 14 муфты сцепления, .соленоид 15 подачи топлива, соленоид 16 поворота рамы копирующего щупа влево и соленоид 17 поворота этой рамы вправо.
Управление тракторами может осуществляться путем выполнения следующих команд:
а)повороты тракторов путем воздействия на датчики муфт поворота;
в)остановка всей группы тракторов при остановке одного из них или при обрыве троса путем выключения муфт сцепления;
г)последовательность подъема и опускания сельскохозяйственных машин-ор/дий с соответствующей перестройкой агрегатов длл движения на поворотной полосе вслед ведущему путем поворота рамы копирующего щупа с датчиком смещения, установленным на ведущем тракторе;
д)автоматический переход от вождения на гоне к вождению на поворотной полосе путем поворота рамы копирующего щупа, передающей через трос сигналы датчикам ведомых тракторов под действием соответствующих соленоидов, связанных с механизмами подъема и опускания сельскохозяйственных машинорудий.
Предмет изобретения
1. Устройство для группового автоматического вождения тракторных агрегатов, включающее тросовую связь между ведущим и ведомым агрегатами, отличающееся тем, что, с нелью повышения точности управления группой агрегатов, тросы снабжены компенсирующими пружинами, имеющими привод к датчикам контактного типа, установленным на агрегатах и обеспечивающим воздействие на исполнительные органы управления.
2.Устройство по п. 1, отличающееся тем, что, с целью поворота тракторов на поворотную полосу, оно снабжено копирующим щупом с новоротной рамой, передающей через трос сигналы датчикам ведомых тракторов под действием соответствующих соленоидов,
связанных с механизмами подъема и опускания сельскохозяйственных машин-орудий.
3.Устройство по пп. 1 и 2, отличающееся тем, что, с целью уменьшения ширины новоротной полосы, поворотная рама копирующего щупа снабжена датчиком смещения, направляющим агрегаты для движения их на поворотной полосе вслед один за другим.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ УХОДА ТРАКТОРНОГО АГРЕГАТА С ЗАДАННОГО КУРСА | 1970 |
|
SU287437A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1973 |
|
SU387643A1 |
| Устройство для автоматизации поворота тракторного агрегата | 1972 |
|
SU439260A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРНОГО АГРЕГАТА | 1967 |
|
SU202604A1 |
| КОПИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ | 1971 |
|
SU296493A1 |
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| Система автоматического вождения сельскохозяйственных агрегатов | 1987 |
|
SU1443831A1 |
| НАВЕСНАЯ СЦЕПКА ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХОРУДИЙ | 1972 |
|
SU435768A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
.2
f-1
Фиг.З
