Изобретение относится к устройствам для направления движения мобильных агрегатов.
Известные устройства содержат копирующий щуп, чувствительную головку, включенную в схему управления электрозолотником гидроусилителя рулевого механизма, и кран для перехода с ручного управления на автоматическое и наоборот. Однако при работе этих устройств для перехода с ручного управления на автоматическое и наоборот необходимо выполнять большое число операций.
Предлагаемое устройство отличается те.м, что кран выполнен в виде двухпозиционного, ступенчатого золотника, у торца которого на сливе из полостей большей ступени, соединенной через калиброванное отверстие в золотнике с напорной магистралью, установлен плунжер с электромагнитом, обмотка которого включена в электросхему управления устройством. Это позволяет сократить число операций перехода с ручного управления на автоматическое и наоборот. Для повышения быстродействия срабатывания трехпозиционный золотник гидроусилителя снабжен на торцах плунжерами, выполненными аналогично плунжеру крана перехода.
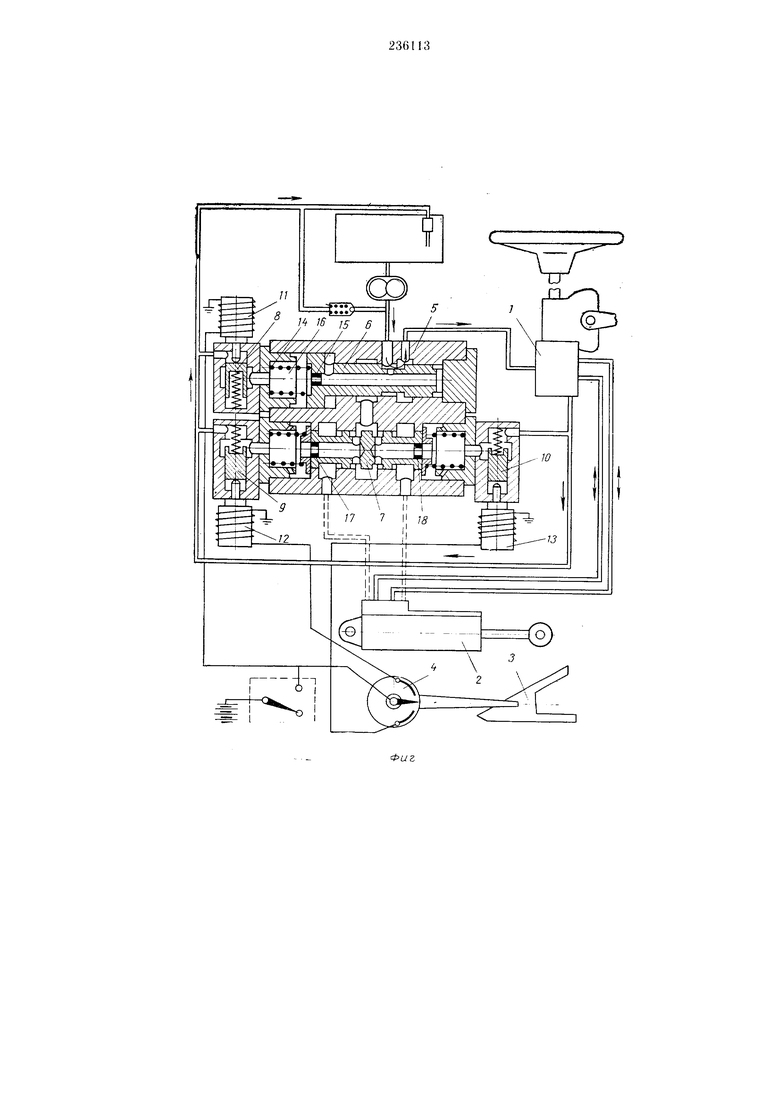
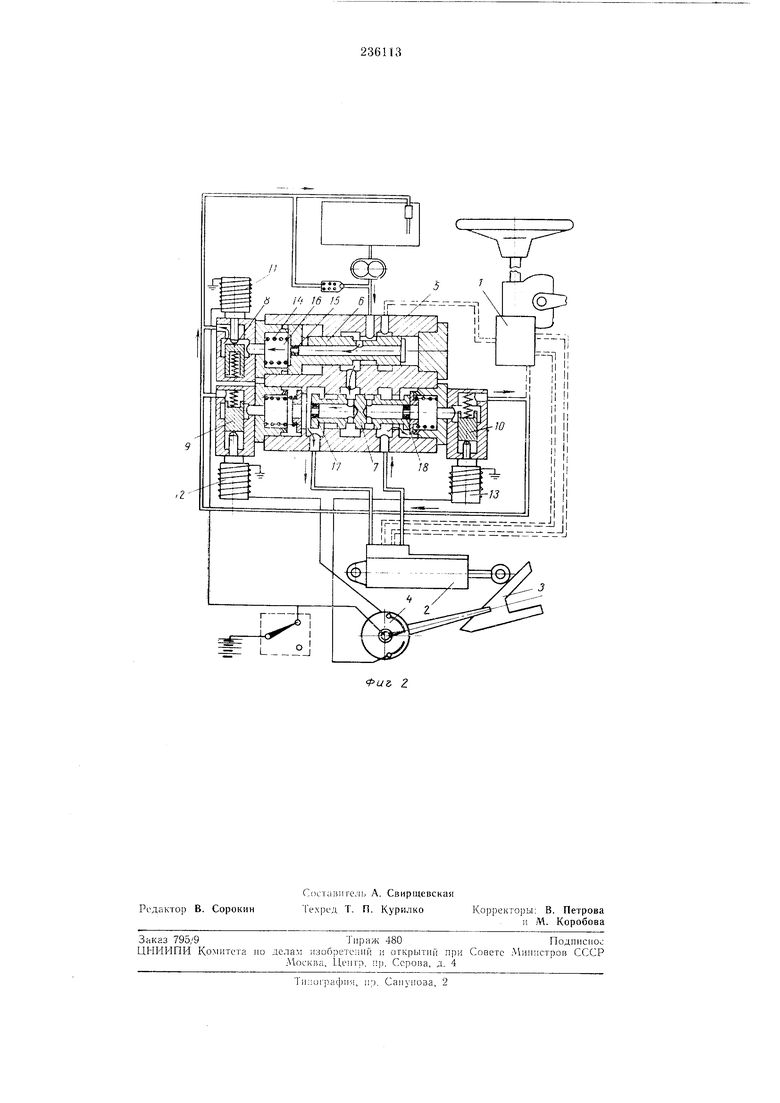
ветствующее .му вождению .машины; на фиг. 2 - то же, положение авто.матического вол-;дения.
Устройство состоит из гидроусилителя рулевого управления / с силовым цилиндром 2 и копирующего щупа 3 с чувствительной головкой 4. В корпусе 5 установ.шны кран 6, выполненный в виде .чцозиционного стуиенчатого золотника, трехпозиционньи золотник 7 и плунжеры 8, 9 и 10 с электромагнитами Л, 12 II 13.
Взаимное положение расточек в корпусе и кране таково, что нри разомкнутой цепи питания, соответствующе рчЧгЮму управлению, рабочая жидкость направляется к гидроусили1елю рулевого управления; кран при это.м -держивается от перемещения 14. Г1ри зам.ыкании цепи питания, что соответствует автоматпческо.му вождению, электромагнит перемещает плунжер крана и сообщает через калиброванное отверстие 15 полость 16 со сливом, между торцами крана возникает разность давлений, и золотник пере.мещается, направляя рабочую жидкость к трехпозиционному золотнику. Таким образо.м, с по.мощью одной операции (замыкания цепи питания) обеспечивается перевод системы в положение автоматического вождения. 3 (П K.ioiisiHii, ог заданного iiaiiijaii.iciii /:, то lu;ток жидкогги долится па дне части, каждая пл 1-л T()jM,x через калиброваииые отверстия 17 ;; /й i ;;лектрс)3о;1отиикс проходи г гапмо илуижсpoii i:a c/iiiB. При отклоиеиии аи1пи1)1 от к и1-5 са дчи/кок ч -иств11ЧеЛ)ИоП головки зам |1каст iKiib .1ектро :агиита J2 (1ли /-Л, ил и1/хеив1 liriii 10. иерс-мешаяе), закр1,.)т иуть ia слии для соотве гств иои1еи части потоки и iseeb погок и пи рав.1Я( гея иа ели-; чеоез калиброваи-К) исе огверетие /7 (или 18. велсдспия чеИ) гюзиикает гид|;ав 1ичеекая )а1И10 еп1е 1иоеть т1н х И13И1И оииого зологиика, оГ)есч1еии иак)и;ая серводе11етвие для eio iiepeNj(4neiM 4 из иеи гралвио о положеиия. Злектпозо, IOTIKIX15 1иии1;аетея до упора, и /i piKoeTb иолучае: . 141дроичпиидру /си.чителм, котои1,1и 1и3 гипиает лппииу иа задаииьп кхре, иги1 игом i; Г итсл1 ио11 i-o/:oisKe коиирующсги ироиеход,ит размь каиие иеии шигаши.20 у/ е:сгро ;а1Ч1ита 12 (или 13), ирекра1ца -тея де1И- Ч ие иереиада давлений иа ториах элекгро,-;(1лотии ка, и иод действием возвратиои ир -/1ч1ии,| ;и хитаиавливается v, иейтра;1И11ог :;().2Ь II U.l м с г 1. строиств() для авт;)мап1ческо1Ч) iiaripaiiлсмшя Д1 п/ке:1ия Ko.ieenoro трактора, содср/каи:,се коиирхчопии туи. чуветвител1Л1у() голов л, :х,1К) в уиравлсиия тоехпоз;:1И1оии1Лл; з()Л)1 Л1кол: гидрохсилите.чя рулевого -.iexaiiiriMa, и для перехода е ручислО и разлеи:1я иа aBiOMa ппкчичое и iiaooopoi, ог.щ ииоис.сся чю. i. иелыо еокраигеиия числа ,ии перехода е рхчиого уиравлеиия ии а15томатичес1 ое и liaoCopoT, Kiiai; зииолиеи {, ;иде д15ухи(:и1иио 1И()Г() стуиепчато1о зололии ка, у ториа КОТОРОГО иа 1з иолоетеи , ;оед1ики1ио | через калиброpaaacje отверстие к золотлике е иаиоиио ма и:ет|И1Л1.1о, сгаиоз,си ) е v. poxiaiии;ч) обмопча )1Ио iiK.i:na4ia н т/;ект|)о;. см у1 равлеиия стро к-тволи 2. ч-троГ ст1 о И) ii, . ),iii4U(iii(eci:i (2:.. ю. с ;eiBio ионвииеиия биклродейстз1 я спиГи Г,115аиия, грехиозиииоии111и з()/и)тиик ;и1Д,роуси/1ите,:я с :абжсч иа :ч)риах ит ч1/керам;И И)ио 1иеиии1 л аигло1ииио киаиа И .иехо,1а.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МАШИНЫ НА КОЛЕСНОМ ХОДУ | 1966 |
|
SU187433A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСНОЙ МАШИНЫ | 1966 |
|
SU180965A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 1991 |
|
RU2032297C1 |
| Н. Ф. Л. А. Вайнштейн, В. А. Кудельский, Л. А. Панн и И. АК^инВййкйй,'^^" . 1:] | 1970 |
|
SU286374A1 |
| УСТРОЙСТВО АВТОЛитИЧЕСКОГО УПРАВЛЕНИЯ СВЕКЛОУБОРОЧНЫМ КОМБАЙНОМ С ОБРЕЗКОЙ БОТВБ1 НА КОРНЮ | 1971 |
|
SU311586A1 |
| УСТРОЙСТВО для РУЧНОГО и АВТОМАТИЧЕСКОГО | 1971 |
|
SU320252A1 |
| ПАХОТНЫЙ АГРЕГАТ | 1971 |
|
SU427665A1 |
| Устройство для автоматического направления движения колесного трактора по рядкам растений | 1978 |
|
SU704499A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| УНИВЕРСАЛЬНАЯ ГИДР&СИСТЕМ.4 СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1971 |
|
SU307755A1 |