Изобретение относится к области средств автоматического управления и может быть использовано для управления динамическими объектами в химической промышленности, теплотехнике, энергетике.
Регуляторы с релейной характеристикой (релейные регуляторы) широко распространены в технике (см., например, Цыпкин Я.З. Релейные автоматические системы. - М.: Наука, 1974. с.44-77). Известны также регуляторы с релейными характеристиками, работающие по принципу «включено-выключено» и имеющие положительный или отрицательный гистерезис (см., например, а.с. СССР и патенты РФ №№631864, 1418648 №1585778, 2369893).
Особенностью автоматических систем, содержащих подобные регуляторы, является наличие автоколебаний регулируемой координаты возле некоторой постоянной величины.
Наиболее близким по технической сути к заявляемому устройству является патент на адаптивный релейный регулятор №2369893 (Опубл. 2009, Бюл. №28). Регулятор-прототип содержит индикатор экстремумов, нуль-орган, релейный блок, сумматор, интегратор, блок вычисления среднего значения регулируемой координаты, источники уровней выходного сигнала, переключатели и усилитель.
Регулятор-прототип является релейным двухпозиционным регулятором с отрицательным переменным гистерезисом, величина зоны гистерезиса в котором поставлена в линейную зависимость от амплитуды автоколебаний. Особенность его заключается в том, что переключения регулятора происходят с опережением (с «недоходом») по отношению к сигналу, определяющему заданное конечное состояние регулируемой координаты с обеспечением симметричности автоколебаний относительно сигнала задания.
Уравнение регулятора (закон управления, реализованный в регуляторе-прототипе) имеет вид

где

есть смещение управляющего сигнала ±В относительно некоторого произвольно заданного значения В1 до величины, обеспечивающей симметричные автоколебания выходного и входного сигналов регулятора относительно B0(t) и х0 соответственно. Здесь k1 - постоянный коэффициент, xmax, xmin - экстремальные значения сигнала регулируемой координаты.  - среднее значение сигнала регулируемой координаты, которое в установившемся режиме работы системы с данным регулятором должно равняться величине сигнала х0.
- среднее значение сигнала регулируемой координаты, которое в установившемся режиме работы системы с данным регулятором должно равняться величине сигнала х0.
 ,
,
k - постоянный коэффициент (0≤k<1),
хэ - экстремальные значения регулируемой координаты, равные ее максимуму или минимуму,
x0 - сигнал задания (заданное конечное значение регулируемой координаты x(t) (переменной)),
Sign - знаковая функция, равная +1 или -1 в зависимости от знака функции M(t),
В - величина управляющего воздействия («полка» реле).
Недостаток регулятора заключается в следующем. Регулятор (1) при его использовании требует в системе автоматического управления наличия следящего исполнительного механизма высокой точности. Это достаточно сложное устройство, работа которого в релейном режиме нежелательна, поскольку снижает его надежность за счет знакопеременных воздействий. Между тем, существенным преимуществом релейного управления является значительное упрощение исполнительного механизма системы за счет снижения требований к его характеристикам и высокая его надежность, возможность получения заданных динамических свойств системы при малых весах и габаритах исполнительных управляющих устройств, которые работают по принципу «открыто-закрыто» или «включено-выключено». Однако его использование в релейной системе приводит к появлению статической ошибки в системе, понимаемой как разность между сигналом задания и средним значением регулируемой переменной в установившемся режиме работы управляемого объекта. Возникающие в системе несимметричные относительно х0 автоколебания и статическая ошибка требуют их устранения тем или иным образом.
Техническим результатом изобретения является упрощение устройства и повышение точности управления в условиях действия несимметричности релейного управляющего сигнала на объект путем автоматического воздействия на входные сигналы.
Для этого в регуляторе-прототипе удалены три источника уровней выходного постоянного сигнала, переключатель и усилитель. А вместо них введено суммирующее устройство, первый вход которого соединен с выходом интегратора, второй вход - со вторым входом регулятора, а выход - со вторым входом сумматора, выход нуль-органа подключен к выходу регулятора.
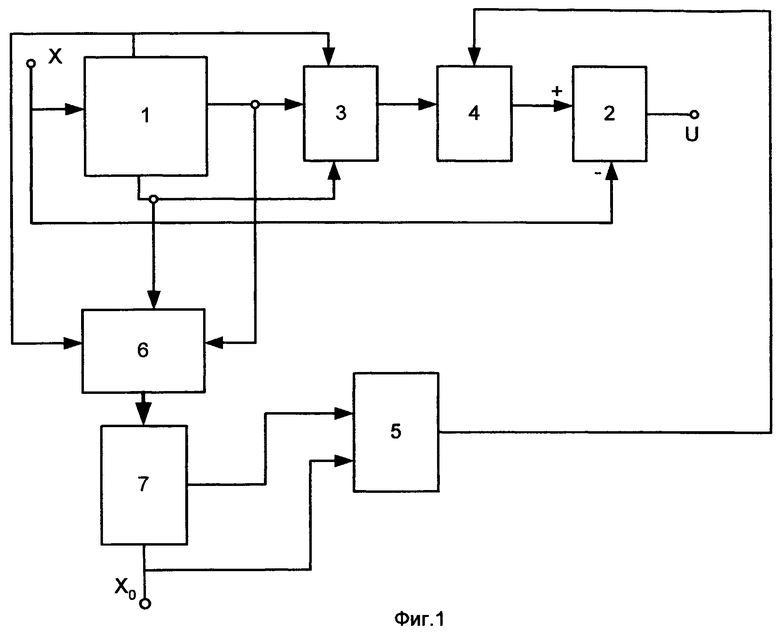
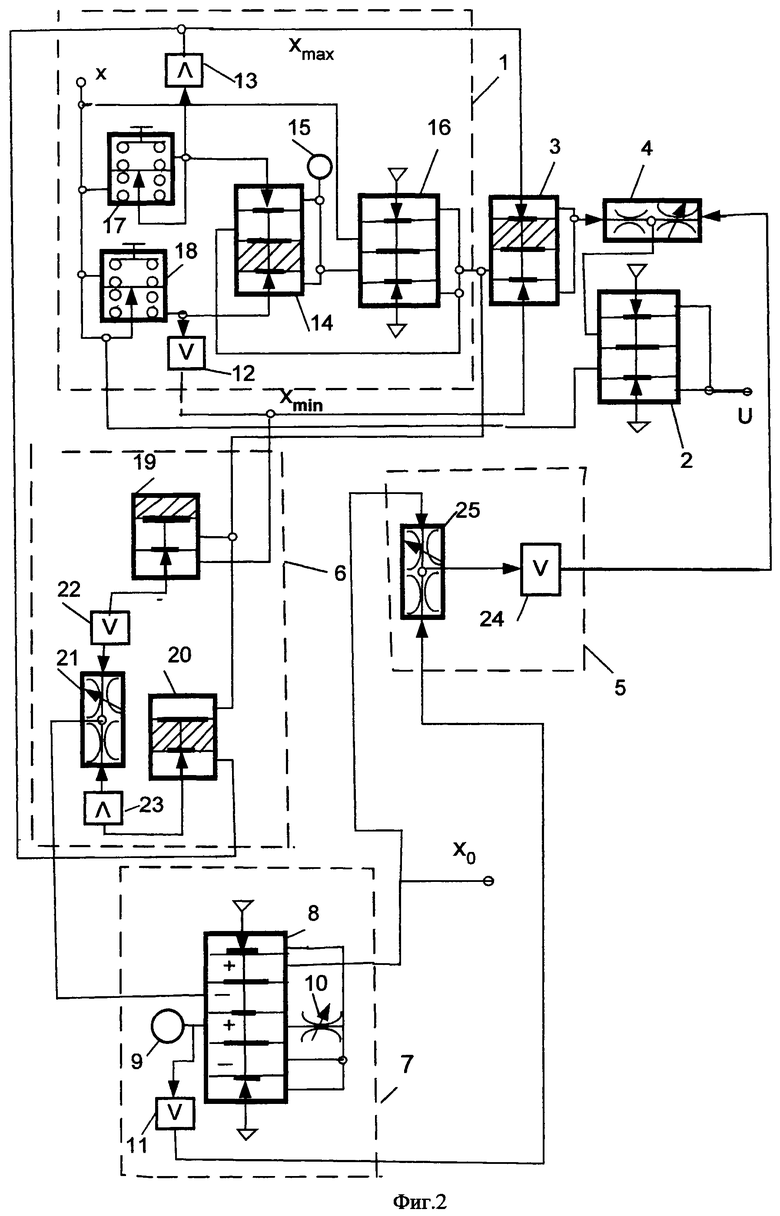
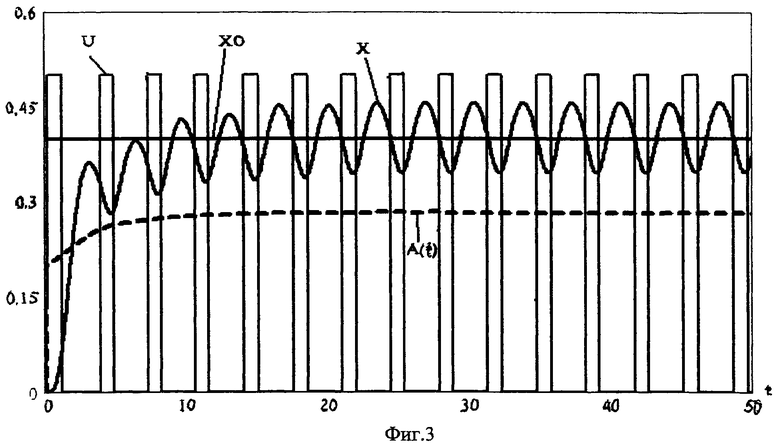
Регулятор изображен на фиг.1, где представлена его блок-схема, фиг.2, которая иллюстрирует пример конкретного выполнения регулятора на пневматических элементах УСЭППА, и фиг.3, где представлены результаты исследования процессов в релейной системе с предложенным регулятором методом цифрового моделирования.
Регулятор содержит (фиг.1) индикатор экстремумов 1, нуль-орган 2, релейный блок 3, сумматор 4, суммирующее устройство 5, блок вычисления среднего значения сигнала 6, интегратор 7, х - первый вход регулятора (переменная), x0 - второй вход регулятора (сигнал задания), U - выходной сигнал регулятора.
Первый вход регулятора (переменная - х) соединен со входами индикатора экстремумов 1 и вторым входом (инверсным) нуль-органа 2, информационные выходы индикатора экстремумов соединены с информаионными входами релейного блока 3 и блока вычисления среднего значения сигнала 6, а управляющий выход индикатора экстремумов связан с управляющими входами релейного блока 3 и блока вычисления среднего значения сигнала 6, второй вход регулятора x0 связан первым входом суммирующего устройства 5 и с первым входом интегратора 7, второй вход которого соединен с выходом блока вычисления среднего значения сигнала 6, выход интегратора 7 подключен к второму входу суммиующего устройства 5, выход которого соединен со вторым входом сумматора 4, первый вход которого связан с выходом релейного блока 3, а выход нуль-органа 2 подключен к выходу регулятора U.
Подобное соединение элементов позволяет модифицировать закон управления (1) и реализовать его следующим образом:

где 
 ,
,
В - постоянная величина,
 ,
,
есть смещение сигнала х0, обеспечивающее смещение и выходного сигнала объекта, (регулируемой координаты x(t)) относительно х0 до тех пор, пока среднее значение регулируемой координаты, определяемое как  ,
,
не станет равным х0. В результате автоматически устраняется статическая ошибка, чем и достигается цель изобретения. Здесь k, k1 и k2 - постоянные коэффициенты, xmax, xmin - экстремальные значения сигнала регулируемой координаты. Sign - знаковая функция, принимающая значение «+1», если сигнал функции переключения (3) больше нуля, и «0», если этот сигнал меньше или равен нулю.
Таким образом, данный регулятор решает задачу обеспечения равенства среднего значения регулируемой координаты в установившемся режиме работы его заданному значению путем автоматического смещения сигнала х0 в сторону увеличения или уменьшения на заранее неизвестную величину. При этом нет необходимости усложнять регулятор и систему управления в целом.
Рассмотрим работу отдельных элементов регулятора и устройства в целом. Индикатор 1 экстремумов (А.С. 482757. БИ 1975, №32) работает следующим образом. При изменении регулируемой координаты, например, в сторону уменьшения на выходе элемента 17 запоминается сигнал хmax при x<(хmax+a), где а - величина сдвига, настраиваемая в элементе 17 запоминания, элемент 16 срабатывает и отключает элемент запоминания 13, закрыв верхний контакт реле 14, а выход элемента запоминания 18 через другой контакт реле 14 соединяется с вторым входом элемента 16 сравнения. При дальнейшем уменьшении сигнала выходной сигнал элемента 16 сравнения не изменяется. С увеличением входного сигнала на выходе элемента 18 запоминания запоминается хmin, элемент 16 сравнения принимает исходное положение, а второй вход элемента 16 сравнения вновь соединяется с выходом элемента 17 запоминания максимума. Повторители 12 и 13 обеспечивают гальваническую развязку сигналов хmax, хmin. Пневмоемкость 15 обеспечивает сохранение сигналов при переключениях реле 14.
Релейный блок 3 (двухконтактное реле) обеспечивает коммутацию хmax, хmin по команде с выхода элемента 16 сравнения на вход сумматора 4. Последний выполнен по схеме дроссельного сумматора. Его выход равен (1-k)·A(t)+k·хэ, где k=d/(d+b), d и b - проводимости дросселей сумматора, A(t) и хэ - сигналы, действующие на входах сумматора 4.
Нуль-орган 2 формирует на своем выходе сигнал управления U, равный «0» или «1» в зависимости от того, меньше или больше нуля сумма сигналов A(t)+k·(хэ-A(t))-x(t)=(1-k)·A(t)+k·хэ-x(t), действующая на его входах.
Блок вычисления среднего значения 6 имеет три входа и может быть реализован, например, так, как показано на фиг.2. Он содержит дроссельный сумматор 21, работающий по принципу сумматора 4 (1-k3)·xmax+k3·xmin(t), повторители-усилители мощности 22 и 23, два клапана 19 и 20, с помощью которых запоминаются сигналы хmax и xmin с выхода индикатора экстремумов 1 по команде с управляющего выхода индикатора экстремумов 1 таким образом, что на выходе повторителя 22 выделяется сигнал минораты входного сигнала, а на выходе повторителя 23 - максоранты. Эти сигналы суммируются в дроссельном сумматоре по формуле  , то есть находится среднее значение входного сигнала на каждом полупериоде колебаний сигнала x(t). Действительно, если сигнал x(t) изменяется от нуля в сторону увеличения Xmin=0, выходной управляющий сигнал индикатора экстремумов 1 равен «1». Поэтому сигнал xmin=0 запоминается в индикаторе экстремумов 1 и проходит через открытый контакт клапана 19, через повторитель 22 и сумматор 24 на вход интегратора 7. Сигнал xmax также равен нулю, и он тоже запоминается с помощью клапана 20 и повторителя 23. Когда появляется xmax≠0, выходной сигнал индикатора экстремумов принимает значение «0». В результате клапан 19 закрывается и сохраняет xmin=0 на выходе повторителя 22, до появления следующего сигнала xmin. Сигнал xmax появляется на выходе клапана 20. Затем при очередном появлении сигнала xmin сигнал хмах запомнится на полпериода автоколебаний сигнала х. Далее цикл повторяется.
, то есть находится среднее значение входного сигнала на каждом полупериоде колебаний сигнала x(t). Действительно, если сигнал x(t) изменяется от нуля в сторону увеличения Xmin=0, выходной управляющий сигнал индикатора экстремумов 1 равен «1». Поэтому сигнал xmin=0 запоминается в индикаторе экстремумов 1 и проходит через открытый контакт клапана 19, через повторитель 22 и сумматор 24 на вход интегратора 7. Сигнал xmax также равен нулю, и он тоже запоминается с помощью клапана 20 и повторителя 23. Когда появляется xmax≠0, выходной сигнал индикатора экстремумов принимает значение «0». В результате клапан 19 закрывается и сохраняет xmin=0 на выходе повторителя 22, до появления следующего сигнала xmin. Сигнал xmax появляется на выходе клапана 20. Затем при очередном появлении сигнала xmin сигнал хмах запомнится на полпериода автоколебаний сигнала х. Далее цикл повторяется.
Интегратор 7 содержит усилитель 8, пневмоемкость 9, дроссель 10 и повторитель 11. Входами его являются выходной сигнал блока вычисления среднего значения 6 и сигнала х0. Это типовое устройство, построенное на усилителе, охваченном инерционной положительной обратной связью и формирующее на своем выходе нарастающий или убывающий сигнал а(t), пропорциональный разности двух сигналов, действующих на его входах.
Суммирующее устройство 5 содержит дроссельный сумматор 25, работающий по принципу сумматора 4, выходной сигнал которого равен A(t)=(1-k2)·a(t)+k2·x0, и повторитель-усилитель мощности 24.
Работу регулятора в целом рассмотрим с привлечением фиг.1 и 2. Пусть сигнал x(t) нарастает от нуля в сторону увеличения, тогда экстремальные значения этого сигнала в момент включения регулятора равны нулю. Один из этих сигналов xmin проходит через релейный блок 3 и сумматор 4 на вход нуль-органа 2. Таким образом, на входе нуль-органа 2 в момент включения регулятора действует сигнал (1-k)A(t)>0 и на его выходе формируется сигнал управления «1».
Одновременно в момент включения регулятора выходной управляющий сигнал индикатора экстремумов 1 воздействует на элементы блока 6, открывая клапан 19 и закрывая клапан 20. В результате на выходе сумматора 21 сохраняется нулевой выходной сигнал. Как только входной сигнал x(t) достигнет величины (1-k)A(t) нуль-орган 2 принимает исходное состояние. В результате выходной сигнал регулятора становится равным U=0. Далее при появлении экстремального значения входного сигнала регулятора хэ=xmax выходной управляющий сигнал индикатора экстремумов 1 вновь становится равным «0». В результате клапан 19 закрывается, Xmin запоминается в повторителе 22, а клапан 20 открывается, обеспечивая прохождение сигнала xmax через повторитель 23 и сумматор 21 на вход интегратора 7. Далее цикл повторяется.
Работа регулятора (2) в динамике иллюстрируется фиг.3, где представлены процессы изменения сигналов регулятора при его использовании в системе управления объектом, который описывается дифференциальным уравнением третьего порядка вида
x'''+2·x''+1.75·x'+0.5·x=1.4·U
Коэффициенты и выходные сигналы источников сигналов были следующими х0=0.4, k=0.75, k1=0.002, k2=0.5, k3=0.5, B=0.5. Из фиг.3 видно, что в момент включения A (t)=0.2, и этот сигнал достаточно быстро нарастает, поскольку входной сигнал интегратора велик, до момента появления первого xmax.
Первое переключение управления происходит с «недоходом» регулируемой координаты х до величины A(t). Затем скорость нарастания выходного сигнала интегратора уменьшается. Изменение сигнала A(t) будет продолжаться до тех пор, пока статическая ошибка не станет равной нулю.
Настройка регулятора связана с установкой коэффициента k таким образом, чтобы амплитуда автоколебаний в системе была бы не больше заданной (Следует отметить, что изменением коэффициента k в функции переключения (3) в диапазоне от 0 до 1 амплитуду автоколебаний в системе при прочих равных условиях можно менять в десятки раз в установившемся режиме работы). Интегратор настраивается таким образом, чтобы процессы в системе были сходящимися.
Регулятор в релейных системах управления технологическими процессами при автоматическом изменении входного задающего сигнала обеспечивает необходимую точность в установившемся режиме работы при существенном упрощении управляющего устройства и системы в целом. В этом проявляются адаптивные свойства заявляемого устройства и его новизна.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2015 |
|
RU2606149C2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2005 |
|
RU2302029C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2007 |
|
RU2359305C2 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Регулятор с релейной характеристикой | 1988 |
|
SU1585778A2 |
| Регулятор с релейной характеристикой | 1986 |
|
SU1432456A2 |
Изобретение относится к области средств автоматического управления и может быть использовано для управления динамическими объектами в химической промышленности, теплотехнике, энергетике. Технический результат - повышение точности управления в условиях действия несимметричности релейного управляющего сигнала на объект - достигается путем автоматического воздействия на входные сигналы, и упрощение устройства достигается тем, что регулятор содержит сумматор, релейный блок, нуль-орган, индикатор экстремумов, вход которого связан с первым входом регулятора и вторым входом нуль-органа, а информационные управляющие выходы - с соответствующими входами релейного блока, выход которого подключен к первому входу сумматора, блок вычисления среднего значения сигнала, информационные входы которого связаны с информационными выходами индикатора экстремумов, управляющий выход которого соединен с управляющим входом блока вычисления среднего значения сигнала, а выход блока вычисления среднего значения сигнала связан с первым инверсным входом интегратора, второй вход которого соединен со вторым входом регулятора, в него дополнительно введено суммирующее устройство, первый вход которого соединен со вторым входом регулятора, второй вход - с выходом интегратора, а выход суммирующего устройства связан со вторым входом сумматора, выход нуль-органа подключен к выходу регулятора. 3 ил.
Адаптивный релейный регулятор, содержащий сумматор, релейный блок, нуль-орган, индикатор экстремумов, вход которого связан с первым входом регулятора и вторым входом нуль-органа, а информационные и управляющий выходы - с соответствующими входами релейного блока, выход которого подключен к первому входу сумматора, блок вычисления среднего значения сигнала, информационные входы которого связаны с информационными выходами индикатора экстремумов, управляющий выход которого соединен с управляющим входом блока вычисления среднего значения сигнала, а выход блока вычисления среднего значения сигнала связан с первым инверсным входом интегратора, второй вход которого соединен со вторым входом регулятора, отличающийся тем, что в него дополнительно введено суммирующее устройство, первый вход которого соединен со вторым входом регулятора, второй вход - с выходом интегратора, а выход суммирующего устройства связан со вторым входом сумматора, выход нуль-органа подключен к выходу регулятора.
| БИООРГАНИЧЕСКОЕ УДОБРЕНИЕ | 2007 |
|
RU2360893C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| Реостатный преобразователь линейныхпЕРЕМЕщЕНий | 1979 |
|
SU853367A1 |
| US 20110046809 A1, 24.02.2011. | |||

