Изобретение относится к области подъемно-перегрузочного оборудования и может быть использовано для перегрузки длинномерных, крупногабаритных грузов бескрановым способом с уменьшением трудовых и энергетических затрат.
Известен автомобильный самоходный полноповоротный стреловой кран [1] состоящий из стрелы, грузовой и стреловой лебедок, грузового и стрелового полиспаста.
Недостатки крана ограниченная грузоподъемность, невозможность проведения подъемно-перегрузочных работ с крупногабаритными, длинномерными грузами в связи с тем, что при их подъеме в конструкции (из-за большой массы) появляются недопустимые изгибающие моменты.
Известен транспортно-перегрузочный агрегат [2] состоящий из двигателя, редуктора, тяговой лебедки, канатно-полиспастной системы, направляющих рельсов, ложементных тележек.
Недостатки транспортно-перегрузочного агрегата сложность конструкции, связанная с большим количеством элементов механизма перегрузки, тормоза, необходимого для затормаживания ложементных тележек, сложностью крепления груза в транспортном положении, большие энергетические затраты, связанные с запасовкой и перезапасовкой каната в процессе перегрузки, динамичность процесса перегрузки, связанная с гибкостью каната.
Наиболее близким к предлагаемому изобретению является механизм перегрузки по патенту США N [3] содержащий смонтированные на грузовой платформе симметрично ее продольной оси направляющие для перемещения груза посредством привода, который образован винтовой парой, винт которой связан через редуктор с двигателем, а гайка жестко закреплена на перемещаемом грузе.
Недостатки механизма перегрузки большие энергетические затраты, необходимость в мощном двигателе, низкий коэффициент полезного действия, динамичность процесса перегрузки.
Цель изобретения снижение энергетических и временных затрат, повышение коэффициента полезного действия, уменьшение динамичности процесса перегрузки.
Использование изобретения позволит применить в механизме менее мощный двигатель, повысить коэффициент полезного действия, снизить энергетические и временные затраты в процессе перегрузки длинномерных грузов с большой массой.
Указанная цель достигается тем, что механизм перегрузки снабжен жестко закрепленными на грузовой платформе опорами с вогнутой внутренней поверхностью для установки направляющих, поперечное сечение каждой из которых выполнено круглым, и дополнительными опорами, закрепленными на нижней поверхности груза и охватывающими внутренней поверхностью, выполненной вогнутой, направляющие, которые связаны с редуктором с возможностью вращения вокруг своих продольных осей.
Новым в предлагаемом техническом решении является то, что механизм снабжен жестко закрепленными на грузовой платформе опорами с вогнутой внутренней поверхностью и дополнительными опорами, закрепленными на нижней поверхности груза и охватывающими внутренней поверхностью, выполненной вогнутой, направляющие.
Сравнение технического решения с аналогами и прототипами позволяет сделать вывод о соответствии критерию "существенные отличия".
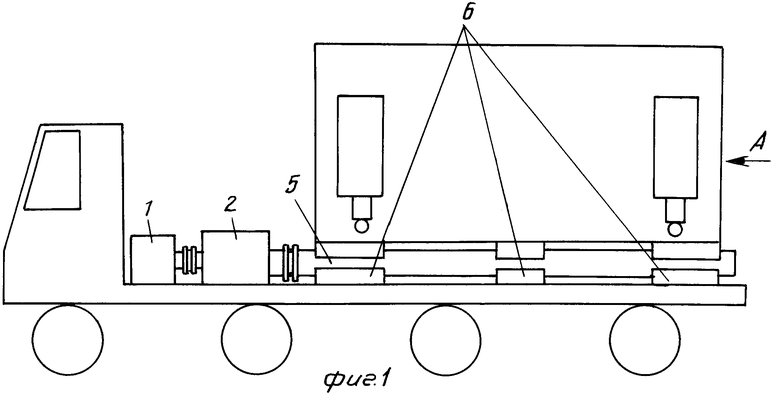
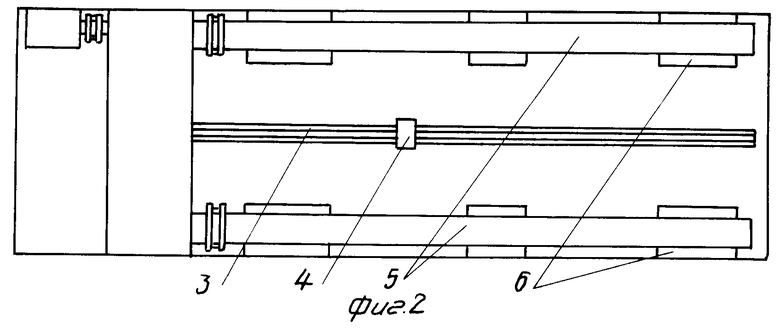
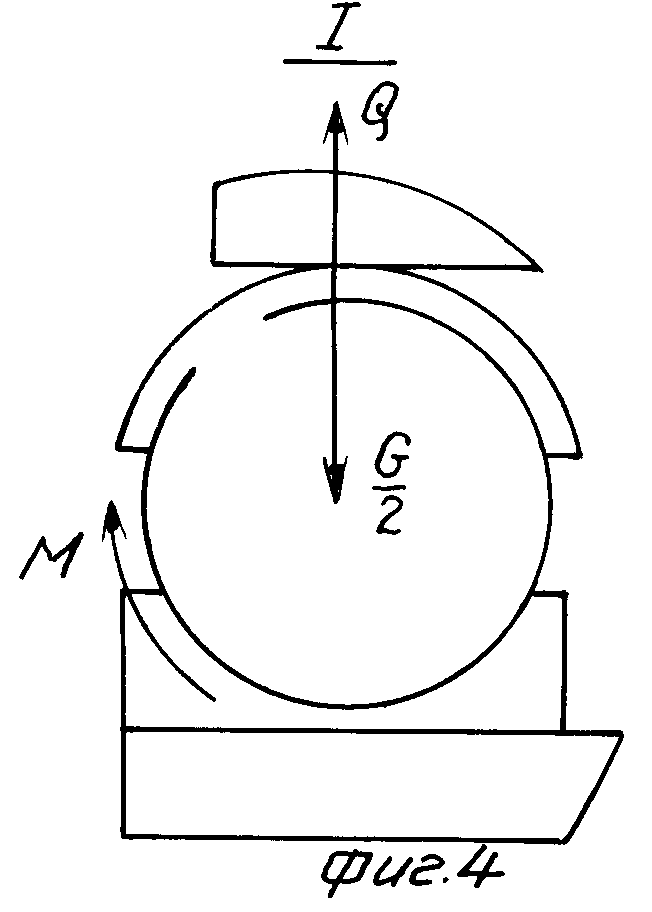
На фиг. 1 приведен механизм перегрузки, вид сбоку; на фиг. 2 то же, вид сверху; на фиг. 3 вид А на фиг. 1; на фиг. 4 узел I на фиг. 3.
Механизм перегрузки содержит двигатель 1, связанный с редуктором 2, винт 3, связанный через редуктор с двигателем и образующий винтовую пару с гайкой 4, жестко закрепленной на перемещаемом грузе, направляющие 5 круглого сечения, также связанные через редуктор с двигателем, опоры направляющих 6 с вогнутой поверхностью, размещенные на грузовой платформе и нижней поверхности груза и охватывающие направляющие сверху и снизу.
Механизм перегрузки работает следующим образом.
При необходимости перегрузки груза на смежный агрегат, направляющие которого предварительно состыкованы с направляющими 5 с помощью замков, не препятствующих их вращению, включается двигатель 1 и приводятся во вращение через редуктор винт 3 и направляющие 5. Винт 3, вращаясь, обеспечивает поступательное движение гайки 4 с грузом. Крутящий момент, необходимый для вращения винта 3, будет уменьшаться с увеличением скорости вращения направляющих, что объясняется следующими обстоятельствами. В исходном положении необходимо преодолеть силу Р Ктр˙G, где G сила веса перемещаемого груза; Ктр коэффициент трения опор груза по направляющим 5.
Вращение направляющих 5 приводит к появлению составляющей силы Q, направленной по вертикали в сторону, противоположную действию силы веса груза G (эффект Жуковского). Таким образом, сила, необходимая для перемещения груза, будет определяться по формуле Р (G Q)Ктр. Значение силы Q будет определяться скоростью вращения направляющих 5. Уменьшение силы Р с увеличением скорости вращения направляющих приводит к уменьшению величины необходимого момента, а значит, и потребной мощности двигателя. Скорость перемещения может задаваться в зависимости от условий эксплуатации. Груз будет перемещаться плавно, без рывков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2593181C1 |
| СПОСОБ БЕСКРАНОВОЙ ПЕРЕГРУЗКИ И ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ И ИЗДЕЛИЙ БОЛЬШОЙ МАССЫ С ПЛОСКИМ ОСНОВАНИЕМ В САМОЛЕТ И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348569C1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСМИССИЯ | 1993 |
|
RU2062712C1 |
| Автопоезд | 1989 |
|
SU1761562A1 |
| СПОСОБ ТРАНСПОРТИРОВКИ, ЗАГРУЗКИ И РАЗГРУЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ В ГРУЗОВУЮ КАБИНУ САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2248308C2 |
| СПОСОБ БЕСКРАНОВОЙ ПЕРЕГРУЗКИ И ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ И ИЗДЕЛИЙ БОЛЬШОЙ МАССЫ НА ПЛАТФОРМУ САМОЛЕТА И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2142390C1 |
| СПОСОБ БЕСКРАНОВОЙ ВЫГРУЗКИ, ТРАНСПОРТИРОВКИ И ПЕРЕГРУЗКИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ И ИЗДЕЛИЙ БОЛЬШОЙ МАССЫ С САМОЛЕТА И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2184052C2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| СПОСОБ БЕСКРАНОВОЙ ВЫГРУЗКИ С САМОЛЕТА, ПЕРЕГРУЗКИ И ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ И ИЗДЕЛИЙ БОЛЬШОЙ МАССЫ С ПЛОСКИМ ОСНОВАНИЕМ И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2353548C1 |
| ВИНТОВОЙ ДОМКРАТ | 1990 |
|
RU2018482C1 |

Использование: для перегрузки длинномерных, крупногабаритных грузов бескрановым способом с уменьшением трудовых и энергетических затрат. Сущность: механизм перегрузки содержит смонтированные на грузовой платформе транспортного средства симметрично продольной ее оси направляющие для перемещения груза посредством привода, который образован винтовой парой, винт которой связан через редуктор с двигателем. Гайка жестко закреплена на перемещаемом грузе. На платформе жестко закреплены опоры с вогнутой внутренней поверхностью для установки направляющих, поперечное сечение каждой из которых выполнено круглым. На нижней поверхности груза закреплены дополнительные опоры, охватывающие внутренней поверхностью, выполненной вогнутой, направляющие, которые связаны с редуктором с возможностью вращения вокруг своих продольных осей. 4 ил.
МЕХАНИЗМ ПЕРЕГРУЗКИ преимущественно на транспортном средстве, содержащий смонтированные на грузовой платформе симметрично продольной ее оси направляющие для перемещения груза посредством привода, который образован винтовой парой, винт которой связан через редуктор с двигателем, а гайка жестко закреплена на перемещаемом грузе, отличающийся тем, что он снабжен жестко закрепленными на грузовой платформе основными опорами с вогнутой внутренней поверхностью для установки указанных направляющих, поперечное сечение каждой из которых выполнено круглым, и дополнительными опорами, закрепленными на нижней поверхности груза и охватывающими внутренней поверхностью, выполненной вогнутой, направляющие, связанные с редуктором с возможностью вращения вокруг своих продольных осей.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пульсирующий гидромонитор | 1987 |
|
SU1448057A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
