Изобретение относится к радиолокации и может быть использовано для защиты радиолокационных станций с фазированными антенными решетками от активных помех.
Известна адаптивная антенная решетка, содержащая по N умножителей, смесителей, усилителей, фильтров, сумматоров и один N-входовый сумматор. Однако данное устройство не обеспечивает удовлетворительной скорости настройки.
Наиболее близким по технической сущности к изобретению является адаптивная многолучевая антенная система, построенная по схеме с предварительной компенсацией помех и последующим формированием лучей, содержащая N-элементную фазированную антенную решетку (ФАР), блок векторно-матричного перемножения, устройство вычисления обратной корреляционной матрицы, блоки скалярного перемножения и источники управляющих сигналов. Однако при объеме обучающей выборки, меньшем числа источников помех, данное устройство не обеспечивает удовлетворительной эффективности их подавления. Потери по сравнению с оптимальной обработкой могут достигать десятков децибел.
Целью изобретения является повышение эффективности подавления активных помех.
Это достигается тем, что в цифровой адаптивной многолучевой антенной системе, содержащей N-элементную ФАР с аналого-цифровыми преобразователями (АЦП), блок компенсации и блок лучеформирования, введены блок формирования дополнительных выборок (БФДВ), блок памяти, блок коммутации и блок синхронизации.
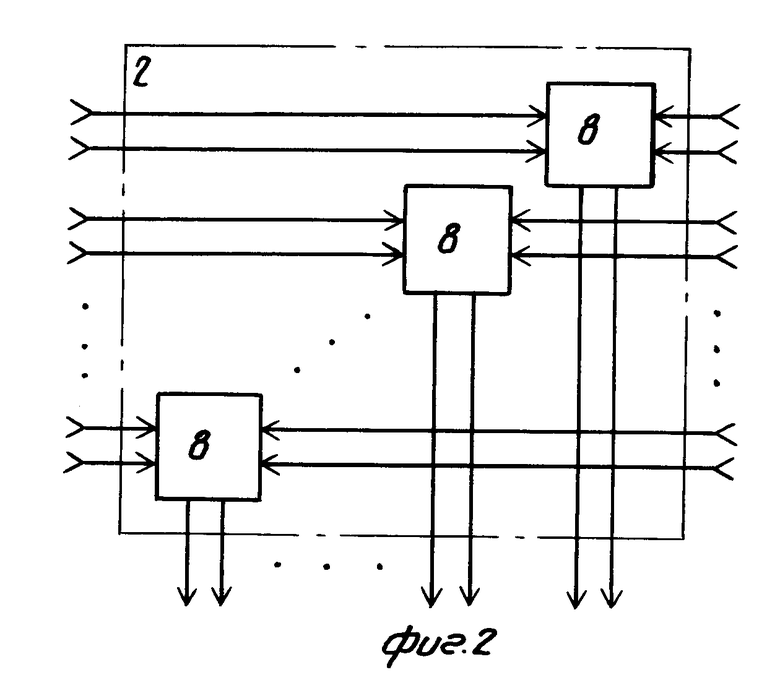
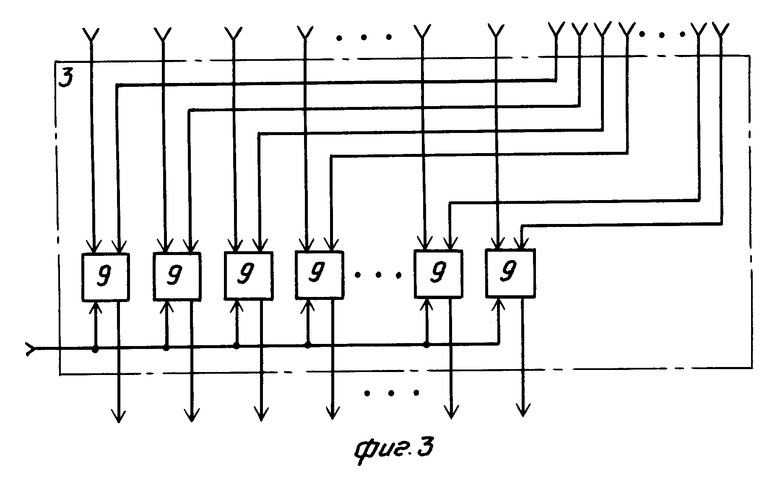
На фиг.1 представлена структурная схема цифровой адаптивной многолучевой антенной системы; на фиг.2 структурная схема блока формирования дополнительных независимых выборок; на фиг.3 структурная схема блока коммутации.
Цифровая адаптивная многолучевая антенная система содержит N-элементную ФАР с АЦП 1, БФДВ 2, блок 3 памяти, блок 4 коммутации, блок 5 компенсации, блок 6 лучеформирования, блок 7 синхронизации. БФДВ 2 содержит N комплексных умножителей (КУ) 8. Блок 4 коммутации содержит 2N коммутаторов 9 типа 2/1.
Устройство работает следующим образом.
На первом выходе блока 7 синхронизации формируется меандр U1(см.фиг.4) с частотой fт/2, который подается на управляющий вход АЦП. Вследствие этого на выходах АЦП формируется дискретная последовательность векторов комплексных отсчетов
Х(n) [x1(n), x2(n),xN(n)]т с периодом 2/fт (где n дискретный момент времени).
Векторы X(n) поступают на вход БФДВ 2, где каждый элемент xi(n) подвергается с помощью КУ 8 комплексному сопряжению и умножению на комплексную величину bi, i  (величины bi хранятся в блоке 3 памяти). На выходе БФДВ 2 формируются векторы комплексных отсчетов
(величины bi хранятся в блоке 3 памяти). На выходе БФДВ 2 формируются векторы комплексных отсчетов
Y(n) [y1(n), y2(n),yN(n)]т, связанные с Х(n) соотношением
Y(n) ПВX*(n), где П матрица перестановок;
В diag{bi}
При этом элементы вектора Y(n) описываются выражением
yi(n) bN-i+1x*N-i+1(n).
В момент, предшествующий началу адаптации, осуществляются начальные установки в блоке 5 компенсации.
В режиме адаптации на вход устройства поступает сигнал U4, соответствующий логическому нулю. При этом управляющий сигнал U2 блока 4 коммутации, формируемый на втором выходе блока 7 синхронизации, совпадает с сигналом U1, т. е. представляет собой меандр с частотой fт/2. Будучи поданным на управляющие входы коммутаторов 9, сигнал U2определяет подключение к входам блока 5 компенсации выходов АЦП при положительном полупериоде и выходов БФДВ 2 при отрицательном. Таким образом, на входах блока 5 компенсации с интервалом I/fт устанавливаются значения отсчетов векторов Х(n-1), Y(n-1), X(n), Y(n), X(n+1), Y(n+1).и т.д.
В режиме адаптации на третьем выходе блока 7 синхронизации формируется сигнал U3, представляющий собой меандр с частотой fт. В соответствии с этим блок 5 компенсации работает с тактовой частотой fт. Сигнал U4, подаваемый на вход смены режима работы блока 5 компенсации, обеспечивает разрешение на запись в ОЗУ блока 5 компенсации.
В режиме адаптации в блоке 5 компенсации осуществляется рекуррентное формирование коэффициентов LDU-разложения выборочной оценки корреляционной матрицы (КМ) помех вида
R(n) [X(n)X(
[X(n)X( )+ Y(n)Y(
)+ Y(n)Y( )] + Iε
)] + Iε
(1)
По окончании режима адаптации сигнал U4 принимает значение, соответствующее логической единице. При этом на втором выходе блока 7 синхронизации формируется сигнал U2, совпадающий с сигналом U4. В результате воздействия логической единицы U2 на управляющий вход блока 4 коммутации входы блока 5 компенсации подключаются к выходам АЦП. Таким образом, на выходе блока 4 коммутации формируются векторы комплексных отсчетов Х(n) с тактовой частотой fт/2.
Одновременно с этим на третьем выходе блока 7 синхронизации формируется последовательность импульсов U3 с частотой fт/2 (см. фиг.4). Сигнал U3, будучи поданным на синхровход блока 5 компенсации, обеспечивает обработку поступающих векторов Х(n) с частотой fт/2. При этом логическая единица на входе смены режима работы блока 5 компенсации фиксирует содержимое ОЗУ блока 5 компенсации.
В результате перехода от режима адаптации к режиму обработки в блоке 5 компенсации осуществляется вычисление векторов комплексных отсчетов вида
Z(n) R-1(Т)X(n), где Т объем обучающей выборки, использованной для получения оценки.
Далее векторы Z(n) поступают на вход блока 6 лучеформирования, где подвергаются линейному преобразованию вида
Q(n) S≈ Z(n), где S матрица размера N х K, i-й столбец которой Si представляет собой комплексную огибающую сигнала, приходящего с ожидаемого i-го направления;
К число лучей.
В результате на i-м комплексном выходе блока 6 лучеформирования формируется отсчет
Qi(n) Si≈ R-1(т)X(n), (2) соответствующий выходному сигналу адаптивного пространственного фильтра, оптимального по критерию максимума отношению сигнал/(помеха + шум) в установившемся режиме.
Оценка корреляционной матрицы помех R(n), вычисляемая в соответствии с формулой (1), учитывает априорную информацию о структуре КМ R, элементы которой rmj связаны соотношением
rN-j+1,N-m+1 fmj rmj, (3) где fmj 1/(bN-m+1 b*N-j+1).
Соотношение (3) справедливо для линейных эквидистантных и плоских ФАР с прямоугольным и гексагональным расположением приемных элементов и амплитудно-фазовой неидентичностью их коэффициентов передачи. При этом хранящиеся в блоке 3 памяти комплексные коэффициенты bm определяются из выражения
bm aN-m+1/a*m, где am комплексный коэффициент передачи m-го приемного элемента.
Предлагаемое устройство позволяет добиться существенного повышения эффективности подавления помех в условиях малого объема обучающей выборки. В частности, основной выигрыш в эффективности реализуется уже при T , где р число помех, [p] ближайшее целое, большее р (для прототипа при Т р).
, где р число помех, [p] ближайшее целое, большее р (для прототипа при Т р).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая адаптивная многолучевая антенная система | 1988 |
|
SU1633472A1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА | 1991 |
|
RU2020671C1 |
| СПОСОБ АДАПТИВНОЙ ГРУППОВОЙ КОМПЕНСАЦИИ ПОМЕХ СПУТНИКОВОМУ РЕТРАНСЛЯТОРУ СВЯЗИ С ГИБРИДНОЙ ЗЕРКАЛЬНОЙ АНТЕННОЙ В РЕАЛЬНОМ ВРЕМЕНИ | 2020 |
|
RU2763932C1 |
| СПОСОБ ИСКЛЮЧЕНИЯ ВЛИЯНИЯ СИГНАЛОВ АБОНЕНТСКИХ СТАНЦИЙ С ППРЧ НА СИСТЕМУ КОМПЕНСАЦИИ ПОМЕХ РЕТРАНСЛЯТОРА СВЯЗИ С МНОГОСТАНЦИОННЫМ ДОСТУПОМ И СИСТЕМА КОМПЕНСАЦИИ ПОМЕХ (ВАРИАНТЫ) | 2005 |
|
RU2289884C2 |
| МНОГОЛУЧЕВАЯ САМОФОКУСИРУЮЩАЯСЯ АНТЕННАЯ РЕШЕТКА | 2014 |
|
RU2577827C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРИЕМНЫЙ МОДУЛЬ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2017 |
|
RU2692417C2 |
| РЕГУЛЯТОР КОМПЛЕКСНЫХ АМПЛИТУД | 1996 |
|
RU2122279C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В РЛС С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 1991 |
|
RU2230337C2 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ПОМЕХ В РЕАЛЬНОМ ВРЕМЕНИ | 2002 |
|
RU2271066C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2011 |
|
RU2495447C2 |


Использование: в радиолокации для защиты радиолокационных станций с фазированными антенными решетками от активных помех. Сущность изобретения: антенная система содержит N-элементную фазированную антенную решетку с аналого-цифровыми преобразователями, блок формирования дополнительных независимых выборок (БФДВ), блок памяти, блок коммутации, блок лучеформирования, блок синхронизации. БФДВ содержит N комплексных умножителей. 2 з.п.ф-лы, 4 ил.
| Ширман Я.Д | |||
| и Манжос В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| М.: Радио и связь, 1981, с.332-336. |
