Изобретение относится к измерениям размеров и формы стопы человека и может быть использовано для автоматического измерения координат поверхности в системе с ЭВМ.
Недостатки контактных способов измерения длительность измерения и наличие погрешностей за счет контакта щупа с мягкой поверхностью стопы и за счет подвижки объекта за длительное время измерения. Контактные методы также создают дискомфорт для клиента при снятии мерки. Известны бесконтактные фотографические методы и автоматические телевизионные способы измерений, которые не позволяют определить обхватные размеры стопы и рассматривают только проекции.
Известен бесконтактный способ измерения координат трехмерной поверхности стопы, заключающийся в освещении стопы системой плоских лучей, параллельных опорной плоскости с автоматическим анализом изображений на ЭВМ, полученных под углом к опорной поверхности так, что биссектриса угла между оптическими осями перпендикулярна опорной поверхности. Способ позволяет произвести определение координат полной поверхности стопы путем расчета по изображениям следа плоских лучей на поверхности стопы (прототип).
Недостатком способа-прототипа является пониженная точность измерения длины стопы за счет образования мертвых зон в носке и пятке. Ухудшение условий измерения в пальцах затрудняет анализ изображения этой сложной поверхности автоматической системой. Кроме того, конструкция устройства, реализующая способ-прототип, оказывается неудобной для клиента и затрудняет опору на ногу из-за необходимости освещения стопы со всех сторон и близким расположением камер по бокам стопы. Наиболее информативный участок стопы в носочно-пучковой части занимает незначительную часть кадра, что также снижает точность.
Цель изобретения повышение точности и удобства при измерении.
Это достигается за счет улучшения условий измерения носочной части при фиксации положения пяточной части по заданой точке с помощью пяточного упора. Улучшение условий измерения обеспечивается смещением к носочной части поля зрения камер, что ликвидирует мертвые зоны в носочной части. Освещение поверхности плоскими лучами из точек, расположенных на вертикалях между каждой камерой и опорной плоскостью, создает наилучшее освещение в поле зрения камер без образования затемнений и разрывов в изображении плоских лучей. Это увеличивает точность и надежность автоматического измерения. Так как телекамеры и осветители оказываются расположены в носочной части стопы, то увеличивается пространство с боковых сторон, не занятое элементами измерительного устройства. Это обеспечивает удобство для измеряемого человека и дает возможность измерения с опорой на стопу, что также увеличивает информативность измерений. Так как пяточный упор определяет положение крайней точки пятки и ликвидированы мертвые зоны в носке, то улучшается точность измерения длиннотных параметров стопы.
Форма пяточного закругления может быть восстановлена интерполяцией, что незначительно усложняет измерение, так как способ предполагает наличие вычислительного устройства. Координаты поверхности стопы рассчитываются по формулам
X X'cos(π/2 θ) Y'sin(π/2 θ);
Y X'sin(π/2 θ) + Y'cos(π/2 θ);
Z Z', где X, Y, Z координатная система для описания поверхности стопы, имеющая центр в точке вершины угла между проекциями оптических осей камер на опорную плоскость, причем ось Z вертикальна к опорной плоскости, а ось X совпадает с биссектрисой угла;
X', Y', Z' координатная система телекамеры, где ось Y' совпадает с проекцией оптической оси данной камеры на плоскость;
θ- половина угла между проекциями оптических осей на опорную плоскость, причем знак θ меняется для второй камеры.
Существенными отличиями предлагаемого технического решения являются визирование стопы при измерении осуществляют со стороны носочной части и по бокам стопы таким образом, что проекции оптических осей телекамер на опорную плоскость образуют угол, вершина которого направлена в сторону пяточной части стопы и находится в точке, расположенной на проекции биссектрисы угла между оптическими осями камер на опорную плоскость, при этом стопу последовательно освещают из точек, расположенных на вертикалях между каждой камерой и опорной плоскостью, а пяточную часть стопы совмещают с заданной точкой, расположенной на проекции биссектрисы угла, причем координаты поверхности стопы получают из формул
X X'cos( π/2 θ) Y'sin( π/2 -θ);
Y X'sin( π/2 θ) + Y'cos( π/2 -θ);
Z Z', где X, Y, Z координатная система для описания поверхности стопы, имеющая центр в точке вершины угла между проекциями оптических осей камер на опорную плоскость, причем ось Z вертикальна к опорной плоскости, а ось X совпадает с биссектрисой угла;
X', Y' Z' координатная система телекамеры, где ось Y' совпадает с проекцией оптической оси данной камеры на плоскость;
θ- половина угла между проекциями оптических осей на опорную плоскость, причем знак θ меняется для второй камеры. Сходных признаков в известных аналогах не обнаружено.
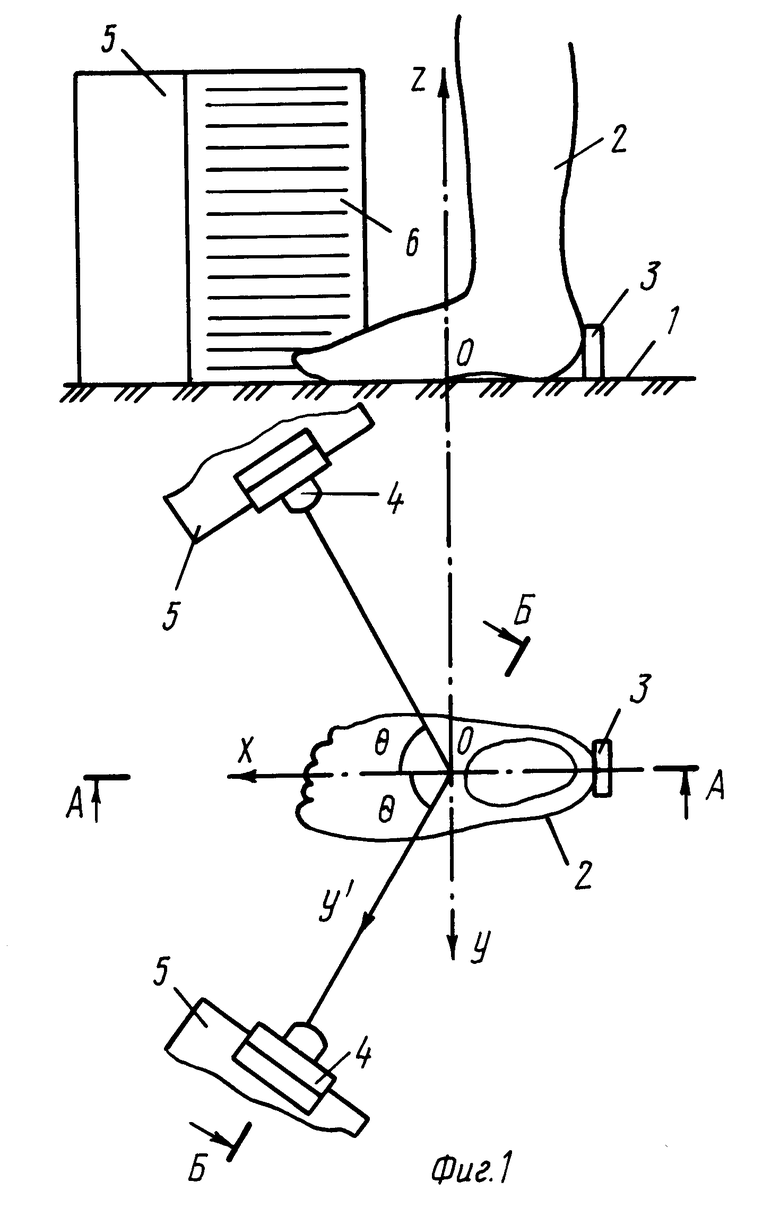
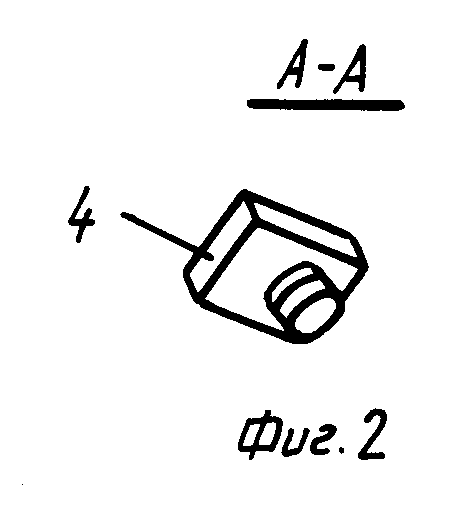
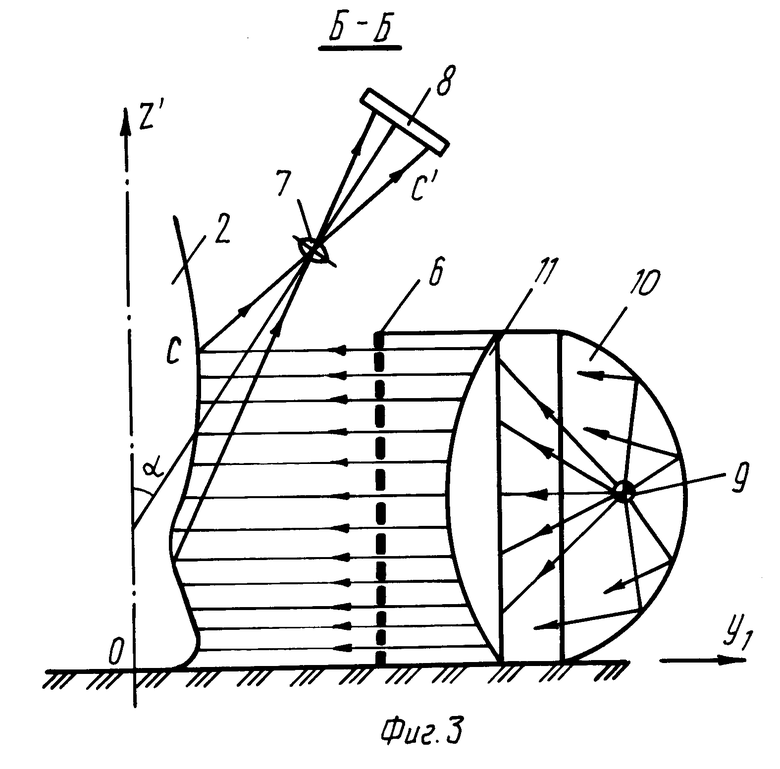
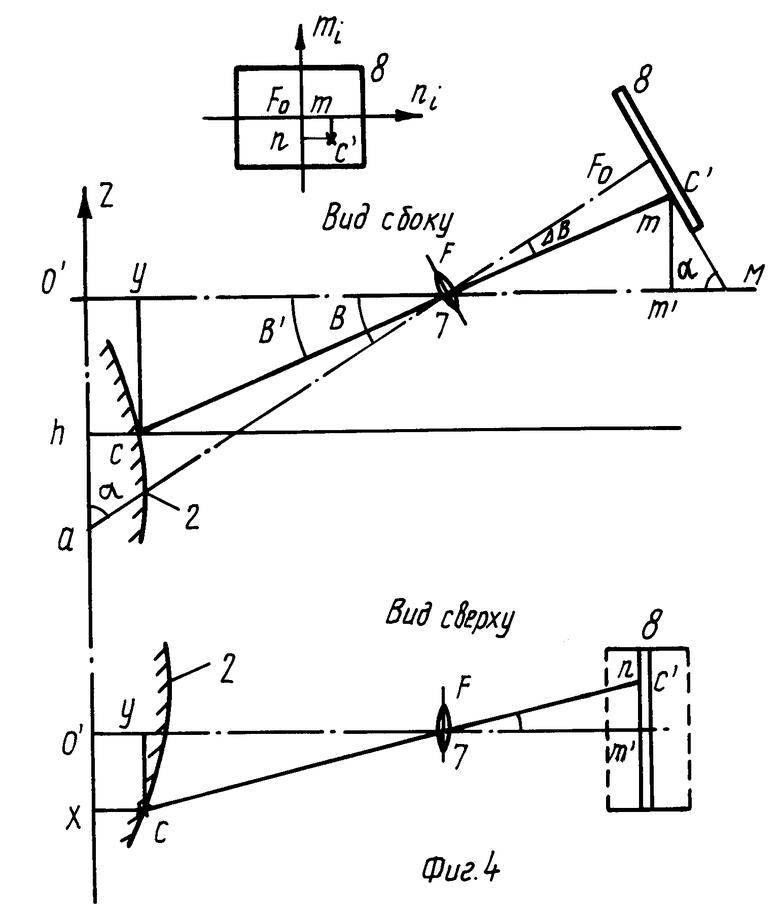
На фиг. 1, 2 и 3 изображена схема устройства, реализующего способ; на фиг. 4 схема расчета координат.
Устройство, реализующее способ, включает основание 1, служащее опорной плоскостью для измеряемой стопы 2, пяточный упор 3, две телекамеры 4 и расположенные под телекамерами осветители 5. Осветители 5 снабжены щелевыми диафрагмами 6 по числу плоских лучей. Телекамеры 4 включают оптическую систему (объектив) 7 и матричный фотоприемник 8. Осветители 5 содержат источник света 9 (линейная лампа), отражатель 10 цилиндрического типа и коллиматор 11 в виде цилиндрической линзы. Элементы осветителя формируют пучок параллельных лучей, которые формируются маской 6. Маска 6 имеет горизонтальные щелевые прорези, положение которых определяет высоту соответствующего луча Hi, где i номер плоского луча и щели. Телекамеры 4 расположены со стороны носочной части по бокам стопы симметрично относительно оси X, на которой находится пяточный упор 3 и которая является осью для базирования стопы. Оптические оси телекамер 4 пересекаются на вертикальной оси Z и образуют с ней угол a. Проекции оптических осей на опорную плоскость 1 составляют с осью X угол θ. Телекамеры 4 связаны с компьютером через согласующее устройство (адаптер), которые входят в состав устройства (на схеме не показаны). Связь телекамеры с адаптером и компьютером выполнена известным образом.
Как видно из схемы устройства, ограничивающие положение стопы элементы 4 и 5 (осветители и камеры) к носочной части и не мешает положению стопы по сравнению с прототипом. Уменьшая угол θ, можно получить компоновку устройства, практически не ограничивающего положение человека. Опорная площадка с упором размещается вне измерительного устройства, но в поле зрения камер. Размещение осветителей 5 под телекамерами 4 обеспечивает оптимальное освещение при любой компоновке устройства, так как направление света совпадает с направлением проекции оптической оси на плоскость, при этом не образуется затенений даже при веерообразных плоских лучах (какие использованы в прототипе), что повышает надежность анализа изображения автоматической системой. Также более эффективно используется пространство кадра, что увеличивает точность отсчета. Ликвидируется мертвая зона в носочной части, так как обеспечивается перекрытие поля зрения камер. Наличие упора 3 позволяет точно определить положение пятки, несмотря на наличие мертвой зоны в пяточной части. Эта зона увеличивается при уменьшении угла θ и для восстановления формы в пяточной части и при измерении обхватов в голени следует применить интерполяцию споайном или дугой. Это возможно потому, что горизонтальные сечения поверхностей пятки и голени, попадающие в мертвую зоны, выпуклы и с высокой степенью симметрии.
Таким образом, предлагаемый способ в сравнении с прототипом позволяет обеспечить при незначительном усложнении расчетов удобство при измерении стопы, улучшить точность и упростить устройство (прежде всего осветитель). Удаленность от стопы элементов измерительного устройства облегчает установку стопы по базовым осям, что также повышает точность.
Измерение координат поверхности стопы производят следующим образом. Стопа 2 устанавливается по оси X и прижимается к пяточному упору 3. Под управлением компьютера (при запуске программы измерения) включается один из осветителей 5 и производится запись координат изображения с расположенной над ним камеры в память компьютера. После этого производится такая же процедура для другой пары осветителя и камеры.
Для каждой камеры производится расчет поверхности в собственных координатах X', Y' Z', которые отличаются от координат измерения стопы X, Y, Z разворотом вокруг оси Z на угол π/2-θ. Оси Z и Z' совпадают.
Расчет координат точки поверхности производят следующим образом.
Пусть на фиг. 2 изображена точка С поверхности стопы 2 и ее изображение на матрице 8 и двух проекциях с координатами n и m от центра матрицы 8. Изображение строится с помощью оптической системы 7, оптическая ось которой FFo пересекает ось OZ под углом a. Точка С принадлежит световой плоскости h, перпендикулярной оси OZ' и имеющей известную координату по оси Z. Также известны и кроме того неизменны отрезки FFo (обозначим f), MFo (обозначим М), JF' и угол b. Известный отрезок O'h, отсекаемый световой плоскостью, обозначим h. Координаты точки С есть O'Y', которые определим как
O'Y' O'F Y'F, где Y'F h/tgb'
Определим угол b' b ±Δb, где tg (Δb) m/f
Таким образом, определение координаты Y' сводится к определению tgb'
tgb′ tg(b± Δb) 
Иногда расчет проще вести, используя вместо тангенсов угла соответствующие отношения геометрических отрезков
O′Y′= O′F′- h 
Здесь переменна только величина m, а при смене светового сечения и величина h. По величине h определяют координату X
X' Y'F tgj, т.е. отыскание угла j дает координату X, так как величина
Y′F h  уже известна.
уже известна.
Для определения угла j используем формулу:
tgj h/Fm', где Fm' проекция луча Fm на ось O'M.
Из треугольника mm'M находим
Fm' FM m'M FM mM/cos a, где только m переменная величина.
Таким образом, зная величины m, n, h, можно найти координаты X', Y', Z' для любой точки С. Для компенсации погрешностей вычислений можно использовать метод тарировки.
Таким образом, достигается повышенная точность измерения за счет улучшения условий измерения носочно-пучковой части стопы, где сосредоточена основная антропометрическая информация. Также повышается удобство в измерении, так как элементы измерительного устройства отнесены от зоны размещения стопы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения поверхности стопы и голени | 1987 |
|
SU1480799A1 |
| Устройство для бесконтактного измерения поверхности стопы и голени | 1988 |
|
SU1586667A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СТОПЫ | 1992 |
|
RU2031617C1 |
| Способ измерения поверхности стопы и голени | 1989 |
|
SU1757599A1 |
| Способ бесконтактного измерения поверхности стопы | 1988 |
|
SU1673029A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1994 |
|
RU2085839C1 |
| Устройство для бесконтактного измерения поверхности стопы и голени | 1988 |
|
SU1673028A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ОБЪЕКТА | 1991 |
|
RU2036443C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОФИЗИЧЕСКИХ ХАРАКТЕРИСТИК ДИЭЛЕКТРИКОВ МЕТОДОМ РАЗРЯДА | 1991 |
|
RU2007737C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОЛЩИНЫ | 1990 |
|
SU1826698A1 |
Применение: измерение размеров и формы стопы человека. Сущность изобретения: способ заключается в установке стопы на опорной площадке, освещении поверхности стопы плоскими лучами света, получении изображения следа этих лучей раздельно для внешней и внутренней боковой поверхностей стопы двумя телекамерами, оптические оси которых направлены под острыми углами к опорной плоскости и к плоским лучам. Визирование стопы осуществляют со стороны телекамеры, развернутыми к пяточной части стопы. При этом проекция оптических осей телекамер на опорную плоскость образуют угол. Вершина угла направлена в сторону пяточной части стопы и находится в точке, расположенной на проекции биссектрисы угла между оптическими осями камер на опорную плоскость. Пяточную часть стопы совмещают с помощью пяточного упора с заданной точкой отсчета, расположенной на проекции биссектрисы угла. 4 ил.
СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПОВЕРХНОСТИ СТОПЫ, заключающийся в установке стопы на опорной площадке, освещении поверхности стопы плоскими лучами света, получении изображения следа этих лучей раздельно для внешней и внутренней боковых поверхностей стопы двумя телекамерами, оптические оси которых направлены под острыми углами к опорной плоскости и к плоским лучам, и определении пространственной формы поверхности по положению изображения лучей, отличающийся тем, что, с целью повышения точности и удобства при измерении путем размещения опорной площадки в отдалении от элементов измерительного узла, визирование стопы осуществляют со стороны носочной части и по бокам стопы телекамерами, развернутыми к пяточной части стопы так, что проекции оптических осей телекамер на опорную плоскость образуют угол, вершина которого направлена в сторону пяточной части стопы и находится в точке, расположенной на проекции биссектрисы угла между оптическими осями камер на опорную плоскость, а пяточную часть стопы совмещают с помощью пяточного упора с заданной точкой отсчета, расположенной на проекции биссектрисы угла, причем координаты поверхности стопы получают из формул:
X = X′·cos(π/2-θ)-Y′·sin(π/2-θ);
Y = X′·sin(π/2-θ)+Y′·cos(π/2-θ);
Z=Z′,
где X, Y, Z координатная система для описания поверхности стопы, имеющая центр на точке вершины угла между проекциями оптических осей камер на опорную плоскость, причем ось Z вертикальна к опорной плоскости, а ось X совпадает с биссектрисой угла;
X′, Y′, Z′ координатная система телекамеры, где ось совпадает с проекцией оптической оси данной камеры на опорную плоскость;
θ половина угла между проекциями оптических осей на опорную плоскость, причем знак q меняется для второй камеры,
при этом стопу освещают из точек, расположенных на вертикалях между каждой камерой и опорной плоскостью.
| Способ бесконтактного измерения поверхности стопы и голени | 1987 |
|
SU1480799A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
