Изобретение относится к области измерений размеров и формы стопы и голени человека и может быть использовано для автоматического измерения координат поверхности в системе с ЭВМ.
Цель изобретения - повышение точно сти измерения стопы за счет одновременного измерения тыльной стороны и плантарной части.
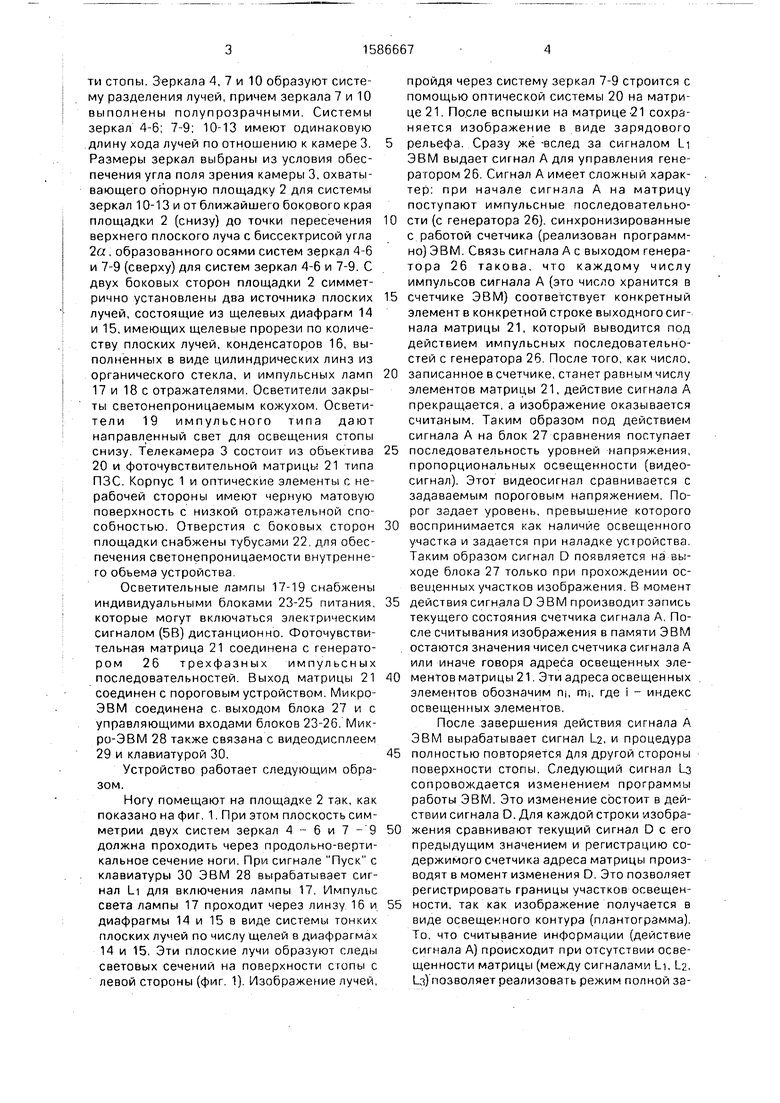
На фиг. 1 и 2 представлена схема устройства: на фиг. 3 - блок-схема управления устройства: на фиг. 4 - система совмещения изображений с одним зеркалом, которое имеет возможность вращения вокруг оси, пересекающей оптическую ось телекамеры и перпендикулярной плоскости угла 2а : на
фиг. 5 - схема расчета координат поверхности.
Устройство включает в себя корпус 1, на котором установлены опорная площадка 2 из органического стекла, телекамера 3, зеркала и осветители: Зеркала 4-6 образуют соответственно первое, второе и третье зеркала первой системы зеркал для отклонения оптической оси камеры с правой стороны. Зеркала 7-9 образуют первое, второе и третье зеркала второй оптической системы для отклонения оси с левой стороны. Для прохода лучей в пределах угла поля зрения камеры 3 с боковых сторон площадки проделаны люки в корпусе 1. Зеркала 10 - 13 образуют третью оптическую систему, обеспечивающую изображение плантарной чассл
00
ON О
о
ы
ти стопы. Зеркала 4, 7 и 10 образуют систему разделения лучей, причем зеркала 7 и 10 выполнены полупрозрачными. Системы зеркал 4-6; 7-9; 10-13 имеют одинаковую длину хода лучей по отношению к камере 3. Размеры зеркал выбраны из условия обеспечения угла поля зрения камеры 3, охватывающего опорную площадку 2 для системы зеркал 10-13 и от ближайшего бокового края площадки 2 (снизу) до точки пересечения верхнего плоского луча с биссектрисой угла 2а. образованного осями систем зеркал 4-6 и 7-9 (сверху) для систем зеркал 4-6 и 7-9. С двух боковых сторон площадки 2 симметрично установлены два источника плоских лучей, состоящие из щелевых диафрагм 14 и 15, имеющих щелевые прорези по количеству плоских лучей, конденсаторов 16, выполненных в виде цилиндрических линз из органического стекла, и импульсных ламп 17 и 18с отражателями. Осветители закрыты светонепроницаемым кожухом. Осветители 19 импульсного типа дают направленный свет для освещения стопы снизу. Телекамера 3 состоит из объектива 20 и фоточувствительной матрицы 21 типа ПЗС. Корпус 1 и оптические элементы с нерабочей стороны имеют черную матовую поверхность с низкой отражательной способностью. Отверстия с боковых сторон площадки снабжены тубусами 22, для обеспечения светонепроницаемости внутреннего объема устройства.
Осветительные лампы 17-19 снабжены индивидуальными блоками 23-25 питания, которые могут включаться электрическим сигналом (5В) дистанционно. Фоточувствительная матрица 21 соединена с генератором 26 трехфазных импульсных последовательностей. Выход матрицы 21 соединен с пороговым устройством. Микро- ЭВМ соединена с. выходом блока 27 и с управляющими входами блоков 23-26. Микро-ЭВМ 28 также связана с видеодисплеем 29 и клавиатурой 30.
Устройство работает следующим образом.
Ногу помещают на площадке 2 так, как показано на фиг. 1. При этом плоскость симметрии двух систем зеркал 4 - 6 и 7 - 9 должна проходить через продольно-вертикальное сечение ноги. При сигнале Пуск с клавиатуры 30 ЭВМ 28 вырабатывает сигнал LI для включения лампы 17. Импульс света лампы 17 проходит через линзу 16 и диафрагмы 14 и 15 в виде системы тонких плоских лучей по числу щелей в диафрагмах 14 и 15. Эти плоские лучи образуют следы световых сечений на поверхности стопы с левой стороны (фиг. 1). Изображение лучей.
пройдя через систему зеркал 7-9 строится с помощью оптической системы 20 на матрице 21. После вспышки на матрице-21 сохраняется изображение в виде зарядового
рельефа. Сразу же -вслед за сигналом Li ЭВМ выдает сигнал А для управления генератором 26. Сигнал А имеет сложный характер: при начале сигнала А на матрицу поступают импульсные последовательно0 сти (с генератора 26). синхронизированные с работой счетчика (реализован программно) ЭВМ. Связь сигнала А с выходом генератора 26 такова, что каждому числу импульсов сигнала А (это число хранится в
5 счетчике ЭВМ) соответствует конкретный элемент в конкретной строке выходного сигнала матрицы 21, который выводится под действием импульсных последовательностей с генератора 26. После того, как число,
0 записанное в счетчике, станет равным числу элементов матрицы 21, действие сигнала А прекращается, а изображение оказъ1вается считаным. Таким образом под действием сигнала А на блок 27 сравнения поступает
5 последовательность уровней напряжения, пропорциональных освещенности (видеосигнал). Этот видеосигнал сравнивается с задаваемым пороговым напряжением. Порог задает уровень, превышение которого
0 воспринимается как наличие освещенного участка и задается при наладке устройства. Таким образом сигнал D появляется на выходе блока 27 только при прохождении ос- веи;енных участков изображения. В момент
5 действия сигнала D ЭВМ производит запись текущего состояния счетчика сигнала А. После считывания изображения в памяти ЭВМ остаются значения чисел счетчика сигнала А или иначе говоря адреса освещенных эле0 ментов матрицы 21. Эти адреса освещенных элементов обозначим щ, mi, где i - индекс освещенных элементов.
После завершения действия сигнала А ЭВМ вырабатывает сигнал L2, и процедура
5 полностью повторяется Для другой стороны поверхности стопы. Следующий сигнал Ls сопровождается изменением программы работы ЭВМ. Это изменение состоит в действии сигнала D. Для каждой строки изобра0 жения сравнивают текущий сигнал D с его предыдущим значением и регистрацию содержимого счетчика адреса матрицы производят в момент изменения D. Это позволяет регистрировать границы участков освещен5 ности, так как изображение получается в виде освещенного контура (плантограмма). То, что считывание информации (действие сигнала А) происходит при отсутствии освещенности матрицы (между сигналами Li, L2, L) позволяет реализовать режим полной заветки матрицы и в два раза улучшить точость измерений.
После записи координат точек для трех кспозиций две боковые поверхности и плантарная часть измерения завершается, 5 а результат определяется расчетным путем на микроэвм. Результат получают в виде координат набора горизонтальных сечений. Возможны различные варианты сопряжения телекамеры 3 с ЭВМ 28. Вместо систе- 10 мы разделения зеркал 4, 7 и 10 можно применить узел, включающий одно зеркало с возможностью вращения вокруг оси, пересекающей оптическую ось камеры 3 и перпендикулярной плоскости угла 2а . На фиг. 15 4 показан узел с зеркалом 4. Зеркало 4 может занимать три фиксированных положе- ния, при которых луч проходит к объективу 20 от зеркала 5, от зеркала 8 и от зеркала 11 соответственно. Такое решение обеспечи- 20 вает одинаковые условия для всех трех систем зеркал,позволяет использовать единый источник питания и выключатель, вместо блоков 23-25 применить источники 17-19 непрерывного, а не импульсного типа. Так же 25 снимаются требования к светонепроницаемости корпуса и к уровню паразитной засветки зоны измерения.
По изображению стопы на матрице 21 определяются геометрические параметры 30 поверхности аналогично известному устройству. Например, изображение получено при освещении стопы источником 18. При этом геометрическая картина соответствует фиг. 5, где прямая АР соответствует развер- 35 нутой длине хода лучей через систему зеркал 6, 5, 4.
Расчет координат точки поверхности производят следующим образом.
Пусть на фиг. 5 изображена точка С по- 40 верхности голени и ее изображение на матрице 21 в двух проекциях с координатами п и m от центра матрицы 21. Изображение строится с помощью оптической системы 20, оптическая ось которой FFo пересекает 45 ось OZ под углом а (фиг. 1). Точка С принадлежит световой плоскости h, перпендикулярной оси OZ и имеющей известную координату по оси Z. Также известны и кроме того неизменны отрезки FFo (обозначим 50 f), FoM (обозначим М), О F и угол Д Известный отрезок О h, отсекаемый световой плоскостью, обозначен h. Координату точки С- (О Y ) определим как
55
OY O F-YF, rfleYF -.
Определим угол
/з±д/з.
, /тч m
где tg (Л/3) --.
Таким образом, определение координаты У сводится к определению tg / :
- « rlilf Иногда расчет проще вести, используя вместо тангенсов угла соответствующие отношения геометрических отрезков:
,-.. m
f-1-М -
0 Y o F-h-.
Здесь переменна только величина т, а при смене светового сечения и величина h. По величине п определяют координату X (фиг. 5 внизу).
X YF X tg у, т.е. отыскание угла у дает нам координату X, так как величина
YF h
f + M M ±m уже известна.
Для определения угла, используем формулу tg у
F m
, где Fm проекция луча
Fm на ось О М (фиг. 5).
Из треугольника mm м находим Fm FM -m м FM - тМ COS
где только m - переменная величина.
Таким образом, зная величины т, п, h, можно найти координаты X, Y, Z, для любой точки С.
Устройство позволяет автоматизировать процесс измерения формы и координат поверхности стопы и голени человека с представлением количественного результата в цифровом виде.
Время измерения минимально и определяется быстродействием электронных устройств. За счет этого уменьшаются погрешности от возможных смещений стопы относительно измерительного устройства. Универсальность устройства позволяет использовать его для подготовки данных САПР обуви, колодок, оснасткм, а также в качестве отдельного измерительного устройства, для антропометрии в медицинских исследованиях и в обувных ателье. Отсутствие движущихся частей повышает надежность и упрощает устройство. Устройство обеспечивает полный охват поверхности стопы с плантарной частью и голени при максимальной простоте реализации и не требует подналадки под размеры стопы и голени. Устройство можно испольгювать и для измерения других объектов - ги псовых слепков стопы, обувных колодок.
Формула изобретения 1. Устройство для бесконтактного измерения поверхности стопы и голени, содержащее опорную площадку для стопы, первый источник плоских лучей, параллельных опорной площадке, две оптические системы, включающие первое и второе зеркала, расположенные сверху, по бокам опорной площадки, оптические оси которых направлены к внешней и внутренней боковой поверхности стопы и голени и образуют угол, вершина которого направлена в сторону опорной площадки, а биссектриса ей перпендикулярна, телекамеру с объективом и фоточувствительной матрицей, связанную с системой управления, отличающее- с я тем, что, с целью повышения точности измерения стопы за счет одновременного измерения, оно дополнительно содержит второй и третий источники плоских лучей, расположенные по бокам опорной площадки, переключающее устройство, систему совмещения изображения, расположенную над телекамерой снизу опорной площадки, которая выполнена прозрачной, третье и
четвертое зеркала, расположенные по бокам и ниже опорной площадки и обращенные к опорной площадке с возможностью направления оптических осей к системе совмещения изображения, систему зеркал изображения плантарной части стопы, оптически связанную с системой совмещения изображения, все источники плоских лучей через переключающее устройство связаны
с системой управления.
2. Устройство по п. 1,отличающее- с я тем, что система совмещения изображения содержит три последовательно расположенных по оптической оси обьектива
телекамеры зеркала, обращенных отражательной стороной к камере с наклоном к ее оптической оси, причем два ближайших к телекамере зеркала выполнены полупрозрачными.
3. Устройство поп. 1,отличающее- с я тем, что система совмещения изображения содержит подвижное зеркало с возможностью вращения вокруг оси, параллельной плоскости зеркал с фиксацией трех положеНИИ.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения поверхности стопы и голени | 1987 |
|
SU1480799A1 |
| Устройство для бесконтактного измерения поверхности стопы и голени | 1988 |
|
SU1673028A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПОВЕРХНОСТИ СТОПЫ | 1990 |
|
RU2034509C1 |
| Способ измерения поверхности стопы и голени | 1989 |
|
SU1757599A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СТОПЫ | 1992 |
|
RU2031617C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1994 |
|
RU2085839C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ СТОП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2177249C2 |
| СПОСОБ БЕСКОНТАКТНОГО ОБМЕРА ТЕЛ СО СЛОЖНОЙ ФОРМОЙ ПОВЕРХНОСТИ | 2005 |
|
RU2296947C2 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |


Изобретение предназначено для автоматического измерения поверхности стопы и голени в системе с ЭВМ. Целью изобретения является повышение точности измерения стопы за счет одновременного измерения тыльной стороны и плантарной части. Для приема изображения используется одна телекамера, расположенная снизу прозрачной опорной площадки. Устройство снабжено тремя оптическими системами зеркал, которые направляют оптическую ось камеры с трех направлений на стопу: сверху (с двух сновных сторон) и снизу. Источник света выполнен в виде трех независимых источников, два из них создают плоские лучи, по изображению следа которых определяют объемные параметры. Две системы зеркал содержат по два боковых зеркала, расположенных выше и ниже опорной площадки, а третья система зеркал содержит три зеркала, расположенных ниже опорной площадки. Устройство снабжено также системой разделения лучей, расположенной по оптической оси телекамеры с возможностью направления этой оптической оси к трем системам зеркал. 2 з.п. ф-лы, 5 ил.
18
J2
П
25
Порог I-;
7
изображение
27
Фиг. 2
л
2ff
L,
D
28
30
ев
0i/e.d
От ifpmaef
/yy/ / /:f//y / // /у/у
| Способ бесконтактного измерения поверхности стопы и голени | 1987 |
|
SU1480799A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
