Изобретение относится к легкой промышленности, в частности к обувной, и может быть использовано при бесконтактном измерении поверхности стопы, в том числе в ателье индивидуального пошива обуви.
Известен бесконтактный стереофотограмметрический способ измерения поверхности стопы [1], основанный на получении горизонтальных световых сечений стопы путем освещения последней пучком параллельных опорной плоскости лучей и расчета координат точек этих сечений на основании измерения изображений фотоснимков.
Однако указанный стереофотограмметрический способ требует применения двух фотокамер. Аналоговое представление информации, предлагаемое по способу, не позволяет определить обхватные параметры стопы.
Известен также бесконтактный способ измерения координат трехмерной поверхности стопы и голени, заключающийся в освещении стопы системой плоских лучей, параллельных опорной плоскости, с автоматическим анализом изображений на ЭВМ, полученных с боковых сторон стопы двумя телекамерами, оси оптических систем которых направлены под углом к опорной поверхности так, что биссектриса угла между оптическими осями перпендикулярна опорной поверхности [2]. Способ позволяет произвести определение координат полной поверхности стопы путем расчета по изображениям следа плоских лучей на поверхности стопы.
Недостатком этого способа является сложность обслуживания осветительного и принимающего изображение оборудования, его настройки и, как следствие, нецелесообразность применения всей системы для малых партий измерений. Кроме того, лучи падают на стопу под малым углом, что приводит к появлению мертвых зон (недосягаемых для лучей).
Наиболее близким к предлагаемому по технической сущности является способ бесконтактного измерения поверхности стопы [3], заключающийся в проецировании на измеряемую поверхность параллельных опорной плоскости плоских лучей, фотографировании следа этих лучей на измеряемой поверхности с помощью съемочной камеры, оптическая ось которой направлена перпендикулярно к опорной плоскости, на которую нанесена координатная сетка, при освещении стопы, размещенной на оптически контрастной плоскости, рассеянным светом от источника с мощностью, меньшей мощности источника плоских лучей, и определении габаритных размеров по границе изображения стопы на опорной плоскости и периметров сечений стопы по фотографии известным способом. По этому способу стопу освещают двумя пучками, равновысотные лучи которых обязательно совмещают в одной плоскости и направляют под углом один к другому. Далее фотографируют только носочно-пучковую часть стопы, как несущую достаточную информацию для определения мерки стопы в условиях ателье индивидуального пошива обуви.
Способ отличают недостаточные технологичность и точность измерения.
Цель изобретения - улучшение технологичности способа при увеличении точности измерений.
Цель достигается проецированием плоских лучей на измеряемую поверхность, фотографированием следа этих лучей на измеряемой поверхности с помощью съемочной камеры, оптическая ось которой направлена перпендикулярно к опорной плоскости, с нанесенной на ней координатной сеткой, и освещением стопы, размещенной на оптически контрастной плоскости, рассеянным светом с мощностью источника, меньшей мощности источника плоских лучей, и определением габаритных размеров по границе изображения стопы на опорной плоскости и периметров сечений стопы по фотографии. Причем проецирование осуществляют пучком плоских расходящихся лучей, направленных под углом в пределах 10-65о к опорной плоскости, и дополнительно измеряют расстояние от следов расходящихся лучей на опорной плоскости до проекции источника на последнюю и определяют высоту точки контура сечения стопы по формуле: Hij = Ho˙(1-Lij/Lio), (1) где i - номер луча, (i= );
);
n - количество лучей;
j - номер сечения, (j =  );
);
К - количество поперечных сечений;
Но - высота источника над опорной плоскостью;
Lio - расстояние от следа луча на опорной плоскости до проекции на нее источника;
Lij - расстояние от j-ого сечения до проекции источника на опорную плоскость, по которой корректируют периметры сечений стопы.
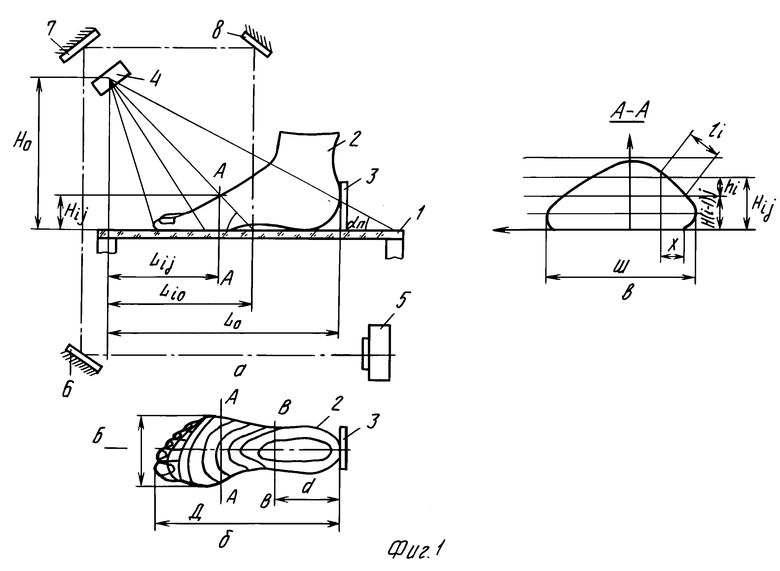
На фиг. 1 (а, б) изображена схема устройства, осуществляющего способ измерения поверхности стопы.
Устройство, осуществляющее способ, включает опорную плоскость 1 для измеряемой стопы 2, снабженную пяточным упором 3 и осветителем 4, расположенным на расстоянии Но от опорной плоскости 1 и на расстоянии Lоот пяточного упора 3. Стопу 2 освещают плоскими расходящимися лучами от осветителя 4, направленными под углом αi к опорной плоскости, лежащим в пределах от 10 до 65о ( αi=10-65о), и рассеянным светом. На опорной плоскости нанесена ось симметрии Б-Б, по которой следует размещать стопу, и координатная сетка (не показана). В зависимости от условий съемки прибор может снабжаться источником рассеянного света для дополнительного освещения стопы. Под опорной плоскостью размещен фотоаппарат 5 с дистанционным пуском затвора, оптическая ось которого с помощью системы зеркал 6-8 направлена перпендикулярно к опорной плоскости 1 на носочно-пучковую часть стопы 2. Система неподвижных зеркал служит для сокращения габаритов прибора при использовании объектива с узким углом зрения.
Измерение осуществляют путем установки на опорной плоскости 1 стопы 2, пяточную часть которой фиксируют с помощью упора 3. Производят экспонирование кадра фотоаппаратом 5. По фотографии определяют расстояние от следа, оставляемого каждым i-м лучом на опорной плоскости, до проекции источника на опорную плоскость (Lio). Оператор производит измерение по снимку, на котором имеется изображение стопы, ограниченное линией В-В, которая отстоит на известное расстояние d от края пятки. Пользуясь координатной сеткой, линейкой и изображением маски, оператор определяет габаритные размеры стопы по границе ее изображения на опорной плоскости с учетом известного положения пятки (длину d, ширину Ш), находит положение измеряемых j-ых сечений стопы по предварительно измеренным габаритным размерам (0,5д, 0,68д и т.п. ), определяет положение точек пересечения этих сечений с изображением следа каждого i-го луча, проекционное расстояние между этими точками двух смежных лучей Х и расстояние от j-го сечения до проекции источника на опорную плоскость (Lij) с последующим определением формы и периметров сечений с учетом высоты каждой точки контура сечения над опорной плоскостью (Нij), номера луча i и номера сечения j.
Проекционные координаты Х и Lij определяют по снимку с помощью линейки, а высоту точек контура сечения Нij рассчитывают по формуле (1) и строят сечение.
После построения сечения периметр его определяют, например, расчетом по следующей формуле:
Pj=Шj+
 = Ш +
= Ш + 
 (2) где Рj, Шj - периметр и ширина j-го сечения соответственно;
(2) где Рj, Шj - периметр и ширина j-го сечения соответственно;
lij - расстояние между точками смежных лучей;
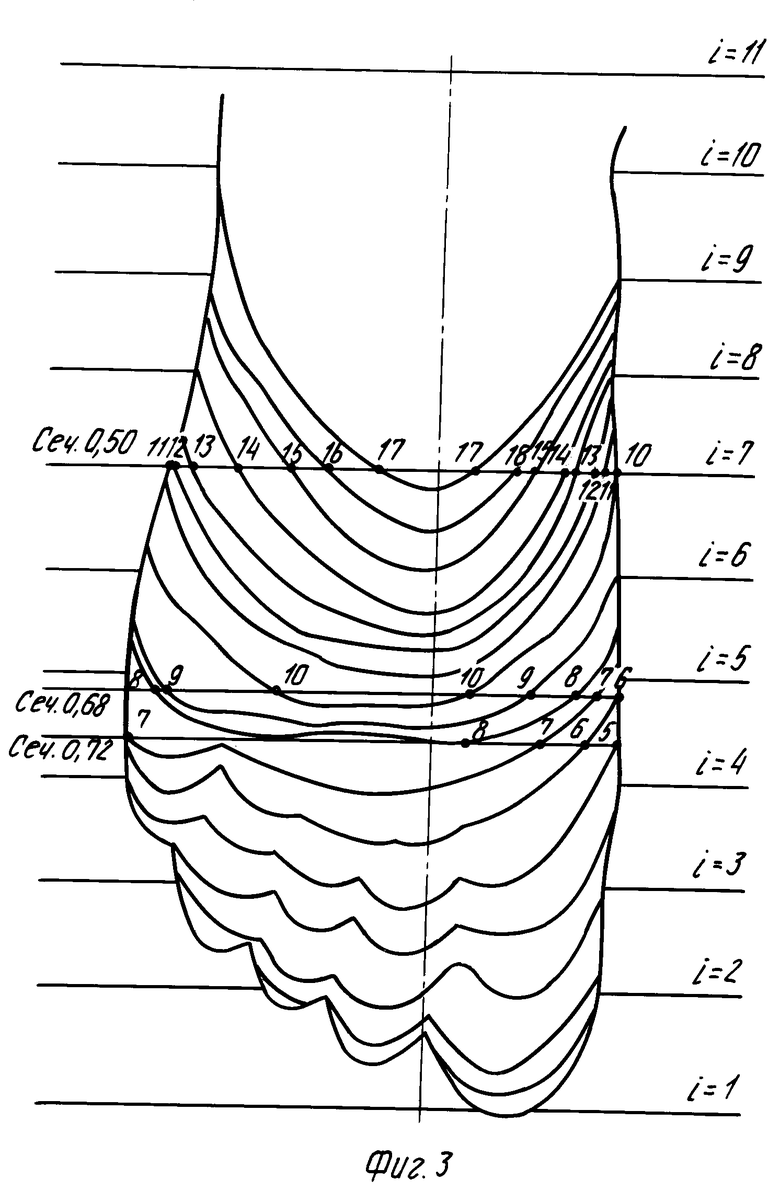
П р и м е р. На фиг.2 приведена фотография стопы по предлагаемому способу и на фиг.3 приведена схема, эквивалентная фотографии при Но=150 мм и Lо= 400, что соответствует пределам от al = 18 до an=42. Для каждого отдельного сечения величина Lij постоянна и рассчитывается, например, для сечения 0,68д по формуле Lij = Lo - 0,68 д, (3) где Lij - расстояние от сечения до проекции источника на опорную плоскость;
Lо - расстояние от пяточного упора до проекции источника на опорную плоскость;
д - длина стопы.
Значения Нij рассчитывают по формуле (1), проекционные расстояния Х и Liо измеряют по схеме фиг.3 и по полученным данным строят сечения (фиг.4), периметры которых рассчитывают по формуле (2).


Использование: в легкой промышленности, в частности в обувной при бесконтактном измерении поверхности стопы. Сущность изобретения: способ включает проецирование на измеряемую поверхность плоских лучей, направленных под углом к опорной плоскости, лежащим в пределах от 30 до 65°, фотографирование следа этих лучей на измеряемой поверхности с помощью съемочной камеры, оптическая ось которой направлена перпендикулярно к опорной плоскости, на которую нанесена координатная сетка, при освещении стопы, размещенной на оптически контрастной плоскости, рассеянным светом от источника с мощностью, меньшей мощности источника плоских лучей, определение габаритных размеров по границе изображения стопы на опорной плоскости и периметров сечений стопы по фотографии и определение высот сечений по формуле Hij= Ho·(1- Lij/Lio), где i - номер луча; j - номер сечения; Ho - высота источника над опорной плоскостью; Lio - расстояние от следа на опорной плоскости до проекции источника на опорную плоскость; Lij - расстояние от j-го сечения до проекции источника на опорную плоскость. 4 ил.
СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СТОПЫ, заключающийся в проецировании на измеряемую поверхность плоских лучей, фотографировании следа этих лучей на измеряемой поверхности с помощью съемочной камеры, оптическая ось которой направлена перпендикулярно к опорной плоскости с нанесенной на ней координатной сеткой, и освещении стопы, размещенной на оптически контрастной плоскости, рассеянным светом с мощностью источника, меньшей мощности источника плоских лучей, и определении габаритных размеров по границе изображения стопы на опорной плоскости и периметров сечений стопы по фотографии, отличающийся тем, что проецирование осуществляют пучком плоских расходящихся лучей, направленных под углом в пределах от 10 - 65o к опорной плоскости, дополнительно измеряют расстояние от следов расходящихся лучей на опорной плоскости до проекции источника на последнюю и определяют высоту точек сечений стопы по формуле
Hij = H0·(1-Lij/Lio),
где i - номер луча;
j - номер сечения;
Ho - высота источника над опорной плоскостью;
Lio - расстояние от следа луча на опорной плоскости до проекции на нее источника;
Lij - расстояние от j-го сечения до проекции источника на опорную плоскость,
по которой корректируют периметры сечений стопы.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ бесконтактного измерения поверхности стопы | 1988 |
|
SU1673029A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Циркуль-угломер | 1920 |
|
SU1991A1 |
